一种变振燃料电池水管理系统及其控制方法与流程
一种变振燃料电池水管理系统及其控制方法
1.技术领域
2.本发明涉及一种变振燃料电池水管理系统及其控制方法,属于燃料电池水管理技术领域。
背景技术:
3.随着人们环保意识的不断增强,汽油和柴油汽车在未来市场上将面临越来越多的挑战,质子交换膜燃料电池(pemfc)汽车是最有前途的替代方案之一,然而,过量的产物水可能导致阴极侧严重的水淹,当水充满气体扩散层(gdl)的孔隙时,从通道到催化剂层的氧气传输路径将被阻塞,因此,产品水的有效管理是提高燃料电池堆性能的重要技术问题之一。
4.燃料电池电堆在复杂路况上行驶时,燃料电池电堆的内部由于震动导致产物水无法及时排除积聚在电堆内部,从而产生水淹现象,有研究表明机械振动可能直接影响gdl和流道的水去除,从而降低或增加内部水淹的风险,然而目前的减震装置缺点在于固定的减震能力并且没有考虑到在水平路段时发生水淹的机械振动对水的去除问题。
技术实现要素:
5.本发明要解决的技术问题是提供一种通过控制燃料电池电堆振动的频率来控制电堆内部的水分布从而对燃料电池电堆进行有效的水管理,避免发生水淹现象,提高燃料电池电堆的有效输出的变振燃料电池水管理系统及其控制方法。
6.为了解决上述技术问题,本发明的变振燃料电池水管理系统,包括用来安置燃料电池电堆的变振装置以及用于对变振装置进行控制的模糊控制器,变振装置包括多个具有电控阻尼器的阻尼器升降台、一个具有振动器的振动器升降台以及位于阻尼器升降台和振动器升降台上方的安置座,燃料电池电堆通过定位件定位安装在安置座上,电控阻尼器通过阻尼弹簧控制线束与模糊控制器连接,振动器通过振动器控制线束同样与模糊控制器连接,模糊控制器能够控制振动器进行振动以及通过控制电控阻尼器动作使燃料电池电堆进行升降。
7.所述燃料电池电堆的表面布置有震动传感器,所述震动传感器通过震动传感器控制线束与模糊控制器相连从而能够将燃料电池电堆的振动频率发送给模糊控制器。
8.所述燃料电池电堆的燃料电池水箱的入口处布置有流量传感器,所述流量传感器通过流量传感器控制线束与模糊控制器连接并能够将燃料电池电堆排出液态水的流量发送给模糊控制器。
9.所述变振装置包括四个具有电控阻尼器的阻尼器升降台,所述振动器升降台设置在安置座的下方中心位置并使四个所述阻尼器升降台布置在该振动器升降台的四周。
10.一种基于上述的模糊控制的变振燃料电池水管理系统的控制方法,
模糊控制器通过震动传感器提供的燃料电池电堆的震动频率,结合燃料电池水箱入口处的流量传感器提供的燃料电池电堆排出液态水的流量数据来判断燃料电池电堆水淹的可能性,若有可能性时分为以下两种处理方式:a、当震动频率超过设定值时,模糊控制器控制电控阻尼器变动阻尼随着震动频率的变化而变化;b、当震动频率小于设定值时,模糊控制器控制振动器振动使得燃料电池电堆震动频率变大,将液态水排出后再关闭振动器。
11.与现有技术相比,本发明具有以下有益效果:(1)通过控制燃料电池电堆振动的频率来控制电堆内部的水分布从而对燃料电池电堆进行有效的水管理,避免发生水淹现象,保证了燃料电池电堆的正常运行。
12.(2)采用模糊控制方法控制整个系统,能够根据监测到的数据快速做出反应,并且不需要依靠精确的数学模型,具有较好的适应性和容错性;(3)可以对在平稳运行时产生的水淹现象进行振动处理,通过合适的震动频率将燃料电池电堆内部的水及时排出,有利于燃料电池电堆保持高效的性能。
13.(4)其结构设计巧妙,控制方法合理,有效解决燃料电池在复杂路况下振动导致燃料电池电堆内部水淹的问题且保证了燃料电池在复杂路况下振动的稳定性,还提高了燃料电池的性能。
附图说明
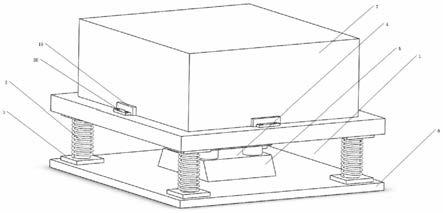
14.图1为本发明中振动装置的结构示意图;图2为本发明中的控制原理图;图3为本发明中的模糊控制规则表;图4为本发明中的控制流程图。
15.其中:1-变振装置、2-电控阻尼器、3-阻尼器升降台、4-振动器、5-振动器升降台、6-底板、7-燃料电池电堆、8-流量传感器控制线束、9-流量传感器、10-控制器电源、11-模糊控制器、12-电控阻尼器控制线束、13-振动器控制线束、14-电机控制线束、15电机、16-电源、17-震动传感器、18-震动传感器控制线束、19-定位块、20-紧固件。
具体实施方式
16.下面结合附图和具体实施方式,对本发明的基于模糊控制的变振燃料电池水管理系统及其控制方法作进一步详细说明。
17.实施例一:如图所示,本发明的基于模糊控制的变振燃料电池水管理系统,用于燃料电池在各种复杂路况下预防和控制水淹进行水管理,保证燃料电池正常的工作运行,它包括用来安置燃料电池电堆7的变振装置1以及用于对变振装置1进行控制的模糊控制器11,所说的变振装置1包括四个阻尼器升降台3、一个振动器升降台5、一个用来安置燃料电池电堆7的安置座以及一个底板6,由图可见,各个阻尼器升降台3上均具有电控阻尼器2,振动器升降台5上具有振动器4,阻尼器升降台3和振动器升降台5均安装在底板6上,阻尼器升降台3的顶端安装在安置座的底部,振动器升降台5则位于安置座的下方,燃料电池电堆7通过四块
定位件(定位块)19定位安装在安置座的正中间位置并用紧固件20将燃料电池电堆固定,燃料电池电堆7的表面布置有震动传感器17,震动传感器17通过震动传感器控制线束18与模糊控制器11相连从而能够将燃料电池电堆的振动频率发送给模糊控制器,燃料电池电堆7的燃料电池水箱的入口处布置有流量传感器9,流量传感器9通过流量传感器控制线束8与模糊控制器11连接并能够将燃料电池电堆7排出液态水的流量发送给模糊控制器,另外,电控阻尼器通过电控阻尼器控制线束12与模糊控制器11连接,通过模糊控制器来实现阻尼大小的变化;振动器4通过振动器控制线束13同样与模糊控制器11连接,由此由震动传感器17、电控阻尼器2、阻尼器升降台3、电控阻尼器控制线束12、模糊控制器11构成减震系统,由振动器4、振动器升降台5、振动器控制器线束13、电机15、模糊控制器11构成振动系统,模糊控制器11能够控制振动器4进行振动以及通过控制电控阻尼器2动作使阻尼器升降台3和振动器升降台5升降从而带动燃料电池电堆7进行升降。
18.进一步地,所说的振动器升降台5设置在安置座以及底板的底部正中心位置并使四个阻尼器升降台布置在该振动器升降台的四周,由此使其稳定性最好,另外,还在底板中集成有用于给四个阻尼器升降台和振动器升降台和振动器的电源供给线路,四个阻尼器升降台和振动器升降台和振动器通过电源供给线路连接电源16,阻尼器升降台3、振动器升降台5以及振动器4均连接有电机15为振动器提供振动的动力,电机通过电机控制线束14、振动器控制线束13与模糊控制器11连接,模糊控制器11还连接有控制器电源10。
19.实施例二:本实施例的基于上述的模糊控制的变振燃料电池水管理系统的控制方法,模糊控制器通过震动传感器提供的燃料电池电堆的震动频率,结合燃料电池水箱入口处的流量传感器提供的燃料电池电堆排出液态水的流量数据来判断燃料电池电堆水淹的可能性,若有可能性时分为以下两种处理方式:a、当震动频率超过实验得出燃料电池电堆最佳的运行路况的震动频率,模糊控制器控制电控阻尼器变动阻尼随着震动频率的变化而变化;b、当震动频率小于实验得出燃料电池电堆最佳的运行路况的震动频率,模糊控制器控制振动器振动使得燃料电池电堆震动频率变大,将液态水排出后再关闭振动器。
20.具体结合附图3对其具体方法作如下详细说明:模糊控制以震动传感器17监测的震动频率变化x和燃料电池电堆7排水流量y为观测量,以燃料电池电堆7水淹可能性u作为输出量,变振装置1震动频率或者减震阻尼的大小作为控制量;模糊控制的观测量x被分为3个模糊集:小震动s1,常震z1,大震动l1;观测量y被分为3个模糊集:小流量s2,常流m1,大流量l2;燃料电池电堆最佳的运行路况的震动频率可由实验测得,设为[a,b]。x<a为小震动;a<x<b时为常震;x>b时为大震动,燃料电池电堆正常的排水流量同样可以测得,设为[c,d]。y<c为小流量;c<y<d为常流;y>d为大流量。
[0021]
模糊控制算法的模糊规则为:(1)若x为s1,y为s2,则u为大(l);(2)若x为s1,y为z2,则u为0(z);(3)若x为s1,y为l2,则u为中(m);(4)若x为z1,y为s2,则u为大(l);
(5)若x为z1,y为z2,则u为0(z);(6)若x为z1,y为l2,则u为中(m);(7)若x为l1,y为s2,则u为大(l);(8)若x为l1,y为z2,则u为中(m);(9)若x为l1,y为l2,则u为大(l);在初始工况下,振动器升降台5处于下降状态,振动器4不工作,与安置座不接触;阻尼器升降台3处于上升状态,电控阻尼器2处于一个常态的减震阻尼,在判断出燃料电池电堆7的内部水淹可能性之后,若是在模糊规则(1)、(3)、(4)、(6)下,则升起振动器升降台,待升起完毕后,降下电控阻尼器升降台,振动器开始振动排出燃料电池电堆内部聚集的水,若是在模糊规则(7)、(8)、(9)状态下则加大电控阻尼器的供给电流直到燃料电池电堆的震动传感器提供的震动频率数据达到常震的频率。
[0022]
详细执行步骤如下:步骤一:根据震动传感器17提供此时燃料电池电堆7的震动数据,若x为小震动s1或常震z1,再由流量传感器9提供的数据y若为小流量s2则执行步骤二;若x为大震动l1,y为小流量s2,则执行步骤三;步骤二:升起振动器升降台5直至振动器4支撑变振装置的安置座,降下阻尼器升降台3,模糊控制器11控制振动器4开始振动,使得燃料电池电堆7振动处于最佳排水的频率下,直到流量传感器9处排水的流量处于正常流量时,执行步骤四;步骤三:若此时阻尼器升降台3处于上升状态,模糊控制器11控制电控阻尼器2的输入电流变化,直到燃料电池电堆7的震动频率处于最佳排水频率,当流量传感器9处排水的流量处于正常流量时,执行步骤四;若此时阻尼器升降台3处于下降状态,模糊控制器11控制阻尼器升降台3上升,当电控阻尼器2支撑变振装置的安置座后,降下振动器升降台5;同样执行电流变化操作后执行步骤四;步骤四:阻尼器升降台3上升状态,振动器升降台5处于下降状态时,恢复原有的电控阻尼器2的电流直至下一次模糊控制器11判断燃料电池电堆7水淹的可能性再次执行步骤一;阻尼器升降台3下降状态,振动器升降台5处于上升状态时,模糊控制器11控制阻尼器升降台3上升至电控阻尼器2支撑变振装置的安置座后,降下振动器升降台5直至下一次模糊控制器11判断燃料电池电堆7水淹的可能性再次执行步骤一。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1