校准发送器至接收器相对相位的方法及毫米波天线模块与流程
1.本发明涉及移动无线通信中的天线系统,更具体地,涉及在毫米波波束成形系统中校准发送器至接收器(transmitter-to-receiver,t2r)相对相位的方法及相关的毫米波天线模块。
背景技术:
2.随着技术的发展,带宽不足的问题使得移动运营商寻找3ghz至300ghz之间未充分利用的毫米波(millimeter wave,mmwave)频谱,第五代(fifth-generation,5g)移动无线通信系统有望在毫米波频带中提供高数据速率。由于毫米波具有较大的路径损耗和较差的穿透性,因此天线设计需要利用天线阵列产生高方向性和可调的动态波束扫描,以提供足够的信号强度。天线阵列和射频集成电路(radio frequency integrated circuit,rfic)可以被封装在毫米波天线模块(antenna module,am)中,该模块包括多个天线单元以增加波束成形增益。
3.在波束成形系统中,具有相同阵列权重矢量(array weight vector,awv)设置(即,限定的何种波束对应关系)的发送器(tx)和接收器(rx)波束方向在理想情况下应该相同。在理想情况下,tx和rx波束具有良好的对应关系,发送器至接收器(transmitter-to-receiver,t2r)相对相位应当为零。然而,tx和rx波束并不总是具有良好的对应关系,因为tx和rx路径的相位可能不同。因此,迫切需要一种新颖的方法来校准t2r的相对相位。
技术实现要素:
4.因此,本发明的目的之一是提供一种校准毫米波波束成形系统中t2r相对相位的方法及相关的毫米波天线模块,以解决上述问题。
5.在本发明的一个实施例中,提供了一种用于毫米波波束成形系统中校准发送器至接收器t2r相对相位的方法。所述方法包括:根据第一发送器tx输入信号产生第一校准信号,并且通过所述毫米波波束成形系统的第一天线将所述第一校准信号传送至所述毫米波波束成形系统的第二天线;通过所述第二天线接收所述第一校准信号,并根据所述第二天线接收的所述第一校准信号,获得第一回送接收器rx信号;根据第二tx输入信号产生第二校准信号,并通过所述第二天线将所述第二校准信号传送至所述第一天线;通过所述第一天线接收所述第二校准信号,并根据所述第一天线接收的所述第二校准信号,获得第二回送rx信号;以及根据所述第一回送rx信号和所述第二回送rx信号之间的相位差,校准所述t2r相对相位。
6.在本发明的另一个实施例中,提供了一种毫米波天线模块,毫米波天线模块包括第一毫米波收发器路径、第二毫米波收发器路径和校准引擎。第一毫米波收发器路径包括第一天线、第一tx路径和第一rx路径。第一tx路径用于根据第一tx输入信号产生第一校准信号,并通过所述第一天线将所述第一校准信号传送至第二天线;第一rx路径用于通过所述第一天线接收第二校准信号,并根据所述第一天线接收的所述第二校准信号,获得第二
回送rx信号。第二毫米波收发器路径包括第二天线、第二tx路径和第二rx路径。第二tx路径用于根据第二tx输入信号产生所述第二校准信号,并通过所述第二天线将所述第二校准信号传送至所述第一天线;以及第二rx路径用于通过所述第二天线接收所述第一校准信号,并根据所述第二天线接收的所述第一校准信号,获得第一回送rx信号。校准引擎用于利用所述第一回送rx信号和所述第二回送rx信号,校准t2r相对相位。
7.通过本发明的方法,毫米波天线模块可以在tx和rx路径之间具有更好的互易性,还可以改善波束成形损耗,从而在天线模块中的天线单元的tx和rx路径之间具有更好的波束对应。
8.在阅读了在各个附图和附图中示出的优选实施例的以下详细描述之后,本发明的这些和其他目的将对本领域技术人员变得显而易见。
附图说明
9.图1是例示根据本发明实施例的毫米波天线模块的示意图。
10.图2是示出了根据本发明实施例的用于校准毫米波波束成形系统中的t2r相对相位t2r_rp的方法的流程图。
11.图3是示出了根据本发明实施例的16个天线单元的t2r相对相位的较小天线阵列校准的示意图。
12.图4为例示根据本发明实施例的64个天线单元的t2r相对相位的较大天线阵列校准的示意图。
具体实施方式
13.在说明书及权利要求当中使用了某些词汇来指称特定的组件。本领域一般技术人员应可理解,电子设备制造商可以会用不同的名词来称呼同一组件。本说明书及权利要求并不以名称的差异来作为区别组件的方式,而是以组件在功能上的差异来作为区别的基准。在通篇说明书及后续的权利要求当中所提及的“包括”是开放式的用语,故应解释成“包括但不限定于”。此外,“耦接”一词在此是包含任何直接及间接的电气连接手段。因此,若文中描述第一装置电性连接于第二装置,则代表该第一装置可直接连接于该第二装置,或通过其他装置或连接手段间接地连接至该第二装置。
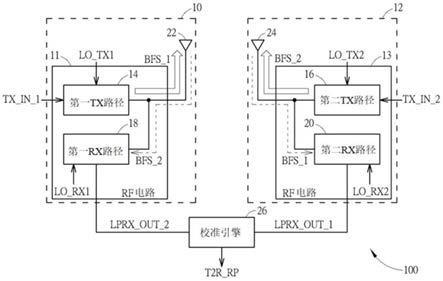
14.图1是例示根据本发明实施例的毫米波(millimeter wave,mmwave)天线模块(antenna module,am)100的示意图。毫米波天线模块100可以包括多个毫米波收发器路径10和12以及校准引擎(校准模块)26,毫米波收发器路径10和12分别具有多个天线22和24。例如,毫米波收发器路径和天线阵列10和12均可以是毫米波天线模块的一部分。在下文中,术语“毫米波收发器路径”和“天线阵列”可以互换。为了更好地理解本发明的技术特征,在图1中仅示出了两个毫米波收发器路径/天线阵列10和12。实际上,毫米波天线模块100可能包括两个以上的毫米波收发器路径/天线阵列,具体取决于实际设计考虑。
15.具有天线22的毫米波收发器路径10可以包括具有第一tx路径14和第一rx路径18的射频(rf)电路11,其中本地振荡器(lo)信号lo_tx1用于第一tx路径14的上变频,并且lo信号lo_rx1用于第一rx路径18的下变频。第一tx路径14可以被布置为根据tx输入信号(例如,中频(if)信号)tx_in_1来发送校准信号(calibrated signal)bfs_1,并通过天线22将
校准信号bfs_1传送至天线24(为简洁起见,校准信号bfs_1的tx路径以图1左侧所示的空心箭头标示)。rx路径18可用于通过天线22接收校准信号bfs_2(其为rf信号)(为简洁起见,校准信号bfs_2的rx路径以虚线箭头标示),并根据由天线22接收的校准信号bfs_2获得回送rx信号(例如,if信号)lprx_out_2。具有天线24的毫米波收发器路径12可以包括具有第二tx路径16和第二rx路径20的rf电路13,其中lo信号lo_tx2用于第二tx路径16的上变频,lo信号lo_rx2用于第二rx路径20的下变频。第二tx路径16可以被布置为根据tx输入信号(例如if信号)tx_in_2发送校准信号(其是rf信号)bfs_2,并将校准信号bfs_2通过天线24传送至天线22(为简洁起见,校准信号bfs_2的tx路径以图1右侧所示的空心箭头标示)。第二rx路径20可用于通过天线24接收校准信号(其为射频信号)bfs_1(为简洁起见,校准信号bfs_1的接收路径以虚线箭头标示),并根据由天线24接收的校准信号bfs_1来获得回送rx信号(例如if信号)lprx_out_1。校准引擎26可以根据从rx路径18和20回送的rx信号lprx_out_1和lprx_out_2,使用内置的算法计算两者之间的相位差(t2r相对相位t2r_rp),并把t2r相对相位t2r_rp补偿至第一tx路径或第二tx路径以调整其相位偏移。
16.在本实施例中,回送rx信号lprx_out_1可以包括3个相位:α相位p1、β相位p2和θ相位p3(即,phase(lprx_out_1)=p1+p2+p3),其中α相位p1通过将tx路径14的信号路径(即,tx路径)的相位失配与rx路径20的信号路径(即,rx路径)的相位失配相加而计算得出,β相位p2(其由lo路由迹线导致)通过从tx路径14的lo信号路径的相位失配中减去rx路径20的lo信号路径的相位失配而计算得出,θ相位p3通过从tx路径14的lo信号路径的初始相位减去rx路径20的lo信号路径的初始相位而计算得出。此外,回送的rx信号lprx_out_2也可以包括3个相位:α相位p4、β相位p5和θ相位p6(即,phase(lprx_out_2)=p4+p5+p6),其中α相位p4通过将tx路径16的信号路径(即,tx路径)的相位失配与rx路径18的信号路径(即,rx路径)的相位失配相加而计算得出,β相位p5可通过从tx路径16的lo信号路径的相位失配中减去rx路径18的lo信号路径的相位失配而计算得出,θ相位p6可通过从tx路径16的lo信号路径的初始相位减去rx路径18的lo信号路径的初始相位而计算得出。
17.此外,t2r相对相位t2r_rp可以通过从回送rx信号lprx_out_1的相位中减去回送rx信号lprx_out_2的相位来计算得出(即,t2r_rp=phase(lprx_out_1)-phase(lprx_out_2),即,t2r_rp=(p1+p2+p3)-(p4+p5+p6)=(p1-p4)+(p2-p5)+(p3-p6))。因此,t2r相对相位t2r_rp可以是α相位差a1、β相位差a2和θ相位差a3这三个相位差之和(即,t2r相对相位t2r_rp=a1+a2+a3),其中α相位差a1可以通过将相位差pd2减去相位差pd1(即,a1=pd2-pd1)得出,相位差pd1为rx路径18的信号路径的相位失配减去rx路径20的信号路径的相位失配,相位差pd2为tx路径14的信号路径的相位失配减去tx路径16的信号路径的相位失配;β相位差a2可以通过将相位差pd3与相位差pd4相加(即,a2=pd3+pd4)来计算得出,相位差pd3可以通过从tx路径14的lo信号路径的相位失配减去tx路径16的lo信号路径的相位失配来计算得出,相位差pd4可以通过从rx路径18的lo信号路径的相位失配减去rx路径20的lo信号路径的相位失配来计算得出;θ相位差a3可以通过将相位差pd5与相位差pd6相加(即,a3=pd5+pd6)来计算得出,相位差pd5可以通过从tx路径14的lo信号路径的初始相位减去tx路径16的lo信号路径的初始相位来计算得出,相位差pd6可以通过从rx路径18的lo信号路径的初始相位减去rx路径20的lo信号路径的初始相位来计算得出。
18.图2是示出了根据本发明实施例的用于校准毫米波波束成形系统中的t2r相对相
位t2r_rp的方法的流程图。在结果基本相同的情况下,可以不按照图2所示的确切顺序执行这些步骤。例如,图2所示的方法可以用于毫米波天线模块100。
19.在步骤s80中,在第一tx路径中根据tx输入信号tx_in_1产生校准信号bfs_1,并通过天线22传送校准信号bfs_1至天线24。
20.在步骤s82中,通过天线24接收校准信号bfs_1,并在第二rx路径中根据由天线24接收的校准信号bfs_1获得回送的rx信号lprx_out_1。
21.在步骤s84中,在第二tx路径中根据tx输入信号tx_in_2产生校准信号bfs_2,并通过天线24传送校准信号bfs_2至天线22。
22.在步骤s86中,通过天线22接收校准信号bfs_2,并在第一rx路径中根据由天线22接收的校准信号bfs_2获得回送的rx信号lprx_out_2。
23.在步骤s88中,根据回送的rx信号lprx_out_1和lprx_out_2之间的相位差,来计算t2r相对相位t2r_rp,并根据计算出的t2r相对相位t2r_rp来调整第一tx路径或第二tx路径中的相位偏移,从而校准t2r相对相位t2r_rp。
24.由于相关领域的技术人员在阅读了以上关于毫米波天线模块100的段落后可以很容易地理解步骤的细节,为了简洁,这里省略进一步的描述。
25.图3是示出了根据本发明实施例的16个天线单元的t2r相对相位的较小天线阵列校准的示意图。同一天线模块(am)300中包含的16个天线单元a1-a16仅用于说明目的,并非对本发明的限制。天线单元a1-a16中每一个天线单元均有2个点以分别代表两个不同的极化v和h,每个极化连接到tx路径或rx路径。需要说明的是,如果在天线单元a1和a16(分别位于天线模块300的对角)之间直接发送和接收信号,信号质量可能会相应降低。因此,本发明的方法中,首先,将16个天线单元a1-a16水平地划分为4个组g1-g4,其中g1组包括天线单元a1-a4,g2组包括天线单元a5-a8,g3组包括天线单元a9-a12,g4组包括天线单元a13-a16。本实施例中的组数、划分方向和组内天线单元的数量仅用于说明,并不用于限制本发明。例如,天线模块300中的天线单元也可以垂直地划分为8个组,两个为一组。假设天线单元a4、a8、a12和a16分别被设置为组g1、g2、g3和g4的锚点(anchor)。首先分别通过本发明的方法校准各组的t2r相对相位(例如,天线单元a1-a4的t2r相对相位、天线单元a5-a8的t2r相对相位、天线单元a9-a12的t2r相对相位、天线单元a13-a16的t2r相对相位)。然后,将天线单元a4、a8、a12和a16设置在同一组g5中,其中天线单元a16设置为g5组的锚点。需要说明的是,本实施例中对各组的锚点a4、a8、a12、a16的选择仅用于说明,并不构成对本发明的限制。在校准g5组的t2r相对相位(即,天线单元a4、a8、a12、a16的t2r相对相位)后,根据组g1-g5的t2r相对相位可以得到天线单元a1-a16的t2r相对相位。
26.在g1组中,首先用本发明的方法分别校准天线单元a1和a4之间的t2r相对相位、天线单元a2和a4之间的t2r相对相位、以及天线单元a3和a4之间的t2r相对相位。假设当天线单元a4的极化v连接到tx路径,天线单元a1-a4的极化h连接到rx路径。天线单元a4的信号从天线单元a4的tx路径分别传送到天线单元a1-a4的rx路径。另外,当天线单元a4的极化v连接到rx路径,天线单元a1-a4的极化h连接到tx路径。天线单元a1-a4的校准信号分别从天线单元a1-a4的tx路径传送到天线单元a4的rx路径。根据上述实施例,t2r相对相位可以是α相位差、β相位差和θ相位差这三个相位差之和(即,t2r相对相位=α相位差+β相位差+θ相位差)。
27.但是需要说明的是,本实施例只关注于相同极化的t2r相对相位。因此,对于天线单元a1-a4的t2r相对相位的θ相位差,θ相位差是通过将相位差spd加上相位差fpd,然后减去相位差tpd和cpd来计算的(即θ相位差=fpd+spd
–
tpd
–
cpd),其中相位差fpd是通过从天线单元a1-a3的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a4的tx路径(连接到极化v)的lo信号路径的初始相位来计算的,相位差spd是通过从天线单元a1-a3的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a4的rx路径(连接到极化v)的lo信号路径的初始相位来计算的,相位差tpd是通过从天线单元a4的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a4的tx路径(连接到极化v)的lo信号路径的初始相位来计算的,相位差cpd是通过从天线单元a4的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a4的rx路径(连接到极化v)的lo信号路径的初始相位来计算的。
28.因此,θ相位差等于相位差gpd和相位差hpd之和(即,θ相位差=fpd+spd
–
tpd
–
cpd=gpd+hpd),其中相位差gpd是通过从天线单元a1-a3的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a4的tx路径(连接到极化h)的lo信号路径的初始相位来计算的,相位差hpd是通过从天线单元a1-a3的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a4的rx路径(连接到极化h)的lo信号路径的初始相位来计算的。因此,天线单元a1-a4的t2r相对相位的θ相位差处于相同的极化(即,极化h)。
29.同理,在g2组中,天线单元a5-a8的t2r相对相位的θ相位差可以通过将一个相位差(该相位差可以通过从天线单元a5-a7的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a8的tx路径(连接到极化h)的lo信号路径的初始相位计算得出)与另一个相位差相加(该相位差可以通过从天线单元a5-a7的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a8的rx路径(连接到极化h)的lo信号路径的初始相位计算得出)而计算得出。
30.在g3组中,天线单元a9-a12的t2r相对相位的θ相位差可以通过将一个相位差(该相位差可以通过从天线单元a9-a11的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a12的tx路径(连接到极化h)的lo信号路径的初始相位计算得出)与另一个相位差相加(该相位差可以通过从天线单元a9-a11的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a12的rx路径(连接到极化h)的lo信号路径的初始相位计算得出)而计算得出。
31.在g4组中,天线单元a13-a16的t2r相对相位的θ相位差可以通过将一个相位差(该相位差可以通过从天线单元a13-a15的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的tx路径(连接到极化h)的lo信号路径的初始相位计算得出)与另一个相位差相加(该相位差可以通过从天线单元a13-a15的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的rx路径(连接到极化h)的lo信号路径的初始相位计算得出)而计算得出。
32.在g5组中,天线单元a4、a8、a12、a16的t2r相对相位的θ相位差可以通过将一个相位差(该相位差可以通过从天线单元a4、a8和a12的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的tx路径(连接到极化h)的lo信号路径的初始相位计算得出)与另一个相位差相加(该相位差可以通过从天线单元a4、a8和a12的rx路径(连接到极化h)
的lo信号路径的初始相位中减去天线单元a16的rx路径(连接到极化h)的lo信号路径的初始相位计算得出)而计算得出。因此,根据组g1-g5的t2r相对相位的θ相位差,可以得到天线单元a1-a16的t2r相对相位的θ相位差。
33.类似地,天线单元a1-a16的t2r相对相位的α相位差和β相位差也可以分别通过本发明的方法获得。为简洁起见,类似的描述在此不再赘述。
34.通过将天线单元a1-a16的t2r相对相位的α相位差、β相位差和θ相位差相加在一起,可以得到同一天线模块300中天线单元a1-a16的t2r相对相位,并基于该t2r相对相位调整发送路径中的相位偏移,使得校准后的t2r相对相位尽可能变小。在通过本发明的方法校准t2r相对相位后,使用天线模块300的毫米波天线模块可以在tx和rx路径之间具有更好的互易性。此外,还可以改善波束成形损耗,从而在天线模块300中的天线单元a1-a16的tx和rx路径之间具有更好的波束对应。
35.图4为例示根据本发明实施例的64个天线单元的t2r相对相位的较大天线阵列校准的示意图。如图4所示,有4个天线模块(am),包括am“a”、am“b”、am“c”和am“d”,其中am“a”包括16个天线单元a1-a16,am“b”包括16个天线单元b1-b16,am“c”包括16个天线单元c1-c16,am“d”包括16个天线单元d1-d16(即64个天线单元包括天线单元a1-a16、b1-b16、c1-c16和d1-d16)。此外,天线单元a1-a16、b1-b16、c1-c16和d1-d16的am内(intra-am)t2r相对相位可以分别通过上述图3所示的实施例获得。为简洁起见,类似的描述在此不再赘述。在分别获得天线单元a1-a16、b1-b16、c1-c16、d1-d16的am内t2r相对相位后,将属于不同am的天线单元a16、b13、c4、d1设置在相同的组g6,其中天线单元a16被设置为组g6的锚点。需要说明的是,本实施例中天线单元b13、c4、d1和锚点a16的选择仅用于举例说明,并不构成对本发明的限制。
36.对于am“b”,通过将天线单元b13参考锚点a16,天线单元a16和b13的t2r相对相位的θ相位差可以通过将一个相位差(该相位差可以通过从天线单元b13的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的tx路径(连接到极化h)的lo信号路径初始相位而得到)与另一个相位差(该另一个相位差可以通过从天线单元b13的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的rx路径(连接到极化h)的lo信号路径初始相位而得到)相加而得到。类似地,天线单元a16和b13的t2r相对相位的α相位差和β相位差可以分别通过本发明的方法获得。为简洁起见,类似的描述在此不再赘述。通过将天线单元a16和b13的t2r相对相位的α相位差、β相位差和θ相位差相加,可以得到天线单元a16和b13的t2r相对相位。然后,通过将根据上述图3所示的实施例得到的天线单元b1-b16的t2r相对相位与天线单元a16和b13的t2r相对相位相加,可以得到天线单元b1-b16和a16的t2r相对相位。
37.对于am“c”,通过将天线单元c4参考锚点a16,天线单元a16和c4的t2r相对相位的θ相位差可以通过将一个相位差(该相位差可以通过从天线单元c4的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的tx路径(连接到极化h)的lo信号路径初始相位而得到)与另一个相位差(该另一个相位差可以通过从天线单元c4的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的rx路径(连接到极化h)的lo信号路径初始相位而得到)相加而得到。类似地,天线单元a16和c4的t2r相对相位的α相位差和β相位差可以分别通过本发明的方法获得。为简洁起见,类似的描述在此不再赘述。通过将天线单
元a16和c4的t2r相对相位的α相位差、β相位差和θ相位差相加,可以得到天线单元a16和c4的t2r相对相位。然后,通过将根据上述图3所示的实施例得到的天线单元c1-c16的t2r相对相位与天线单元a16和c4的t2r相对相位相加,可以得到天线单元c1-c16和a16的t2r相对相位。
38.对于am“d”,通过将天线单元d1参考锚点a16,天线单元a16和d1的t2r相对相位的θ相位差可以通过将一个相位差(该相位差可以通过从天线单元d1的tx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的tx路径(连接到极化h)的lo信号路径初始相位而得到)与另一个相位差(该另一个相位差可以通过从天线单元d1的rx路径(连接到极化h)的lo信号路径的初始相位中减去天线单元a16的rx路径(连接到极化h)的lo信号路径初始相位而得到)相加而得到。类似地,天线单元a16和d1的t2r相对相位的α相位差和β相位差可以分别通过本发明的方法获得。为简洁起见,类似的描述在此不再赘述。通过将天线单元a16和d1的t2r相对相位的α相位差、β相位差和θ相位差相加,可以得到天线单元a16和d1的t2r相对相位。然后,通过将根据上述图3所示的实施例得到的天线单元d1-d16的t2r相对相位与天线单元a16和d1的t2r相对相位相加,可以得到天线单元d1-d16和a16的t2r相对相位。
39.最后,根据上述图3所示实施例得到的天线单元a1-a16的t2r相对相位、天线单元b1-b16和a16的t2r相对相位、天线单元c1-c16和a16的t2r相对相位以及天线单元d1-d16和a16的t2r相对相位,可以得到不同天线模块中64个天线单元的t2r相对相位。通过本发明的方法校准t2r相对相位后,使用多个天线模块的毫米波天线模块可以在tx和rx波束之间具有更好的波束对应。
40.本领域技术人员将容易地认识到,在保留本发明的教导的同时可以对装置和方法进行多种修改和改变。因此,上述内容应被解释为仅受所附权利要求的界限和范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1