一种调整天线角度的方法、装置和系统与流程
1.本发明涉及天线技术领域,尤其涉及一种调整天线角度的方法、装置和系统。
背景技术:
2.目前,家用无线路由器大多使用全向天线。在实际使用中,天线辐射并非理想的全向,而是存在优势辐射方向和劣势辐射方向。当客户端在天线的优势辐射方向上时,信号强度更高,体验更好。因此,为改善通信质量,需要调整天线辐射方向,使天线的优势辐射方向朝向客户端,提升客户端的体验。
3.在现有技术中,常见的方法是通过天线的机械转动来调整天线的覆盖角度。在一种实施中,用户通过手动转动天线的方式来调整,这种方式不是通过技术参数来调整,而是靠用户的感觉和想象,调整效果往往适得其反。在另一种实施中,使用电机带动天线转动,并根据算法实现自动调整天线覆盖角度。例如,通过遍历天线辐射角度与无线参数之间的关系,来选择最终的天线覆盖角度。但是,由于需要遍历角度与参数之间的关系,整个过程耗时长,导致角度调整的实时性不强,影响用户体验。
4.综上,现有技术中调整天线覆盖角度的方式,调整的效果不佳或者实时性不强,影响用户体验。
技术实现要素:
5.本发明提供了一种调整天线角度的方法、装置和系统,以实现较少迭代次数,即可找到rssi更好的位置,从而实现快速寻找天线信号更强的角度。
6.第一方面,为了解决上述技术问题,本发明提供了一种调整天线角度的方法,由主控制模块执行,包括:
7.获取初始rssi值;
8.以i的初始值为1,根据第i次旋转步长生成调整指令并发送至电机控制模块,以使所述电机控制模块根据所述调整指令和预先配置的运动控制模型控制天线转动;
9.获取天线旋转后的rssi值,并计算所述初始rssi值与所述旋转后的rssi值的差值;
10.对所述第i次旋转步长进行更新,得到第i+1次旋转步长;
11.判断是否满足终止迭代条件,若是,则天线角度调整结束;若否,则对i加一,返回至所述根据第i次旋转步长生成调整指令并发送至电机控制模块的步骤。
12.优选地,所述判断是否满足终止迭代条件,包括:
13.当所述差值的绝对值小于预设的收敛精度时,或当所述第i+1次旋转步长大于预设的旋转边界时,或当i大于或等于预设的最大迭代次数时,判定满足终止迭代条件。
14.优选地,所述方法还包括:
15.根据所述差值和所述第i次旋转步长计算步长梯度;
16.判断所述步长梯度的绝对值是否大于预设的梯度阈值,若是,则判定发生过冲现
象;若否,则判定没有发生过冲现象。
17.优选地,在判定发生过冲现象时,所述对所述第i次旋转步长进行更新,得到第i+1次旋转步长包括:
18.当判定所述差值大于零时,根据所述步长梯度、预设的学习率和动量衰减因子得到更新后的动量;
19.根据所述第i次旋转步长、所述动量衰减因子和更新后的动量,得到第i+1次旋转步长;
20.当判定所述差值小于零时,将动量更新为零,并根据所述步长梯度、所述学习率和所述动量衰减因子得到第i+1次旋转步长。
21.优选地,在判定没有发生过冲现象时,所述对所述第i次旋转步长进行更新,得到第i+1次旋转步长包括:
22.当判定所述差值大于零时,根据所述步长梯度、预设的学习率和动量衰减因子得到更新后的动量;
23.根据所述第i次旋转步长和所述动量衰减因子,得到第i+1次旋转步长;
24.当判定所述差值小于零时,根据所述步长梯度、所述学习率、所述动量衰减因子和预设的初始动量,得到更新后的动量;
25.对更新后的动量取相反数,得到第i+1次旋转步长。
26.优选地,在所述得到第i+1次旋转步长之后,所述方法还包括:
27.对所述第i+1次旋转步长进行规范约束。
28.第二方面,本发明提供了一种调整天线角度的装置,所述装置设于主控制模块内,包括:
29.数据获取模块,用于获取初始rssi值;
30.调整指令模块,用于以i的初始值为1,根据第i次旋转步长生成调整指令并发送至电机控制模块,以使所述电机控制模块根据所述调整指令和预先配置的运动控制模型控制天线转动;
31.差值计算模块,用于获取天线旋转后的rssi值,并计算所述初始rssi值与所述旋转后的rssi值的差值;
32.步长更新模块,用于对所述第i次旋转步长进行更新,得到第i+1次旋转步长;
33.迭代判断模块,用于判断是否满足终止迭代条件,若是,则天线角度调整结束;若否,则对i加一,返回至所述根据第i次旋转步长生成调整指令并发送至电机控制模块的步骤。
34.第三方面,本发明还提供了一种调整天线角度的方法,由电机控制模块执行,包括:
35.接收主控制模块发送的调整指令;
36.根据所述调整指令和预先配置的运动控制模型控制天线转动。
37.优选地,所述根据所述调整指令和预先配置的运动控制模型控制天线转动,包括:
38.基于天线上所有电机的转动角度,建立电机角度矩阵;
39.根据所述电机角度矩阵和天线的当前角度状态,得到当前角度矩阵;
40.根据所述电机角度矩阵和所述调整指令,得到目标角度矩阵;
41.计算所述目标角度矩阵与所述当前角度矩阵的矩阵差值,并根据所述矩阵差值控制天线转动。
42.优选地,所述根据所述调整指令和预先配置的运动控制模型控制天线转动,包括:
43.获取每一电机的步进角度;
44.根据所述步进角度,构建关于电机目标位置的步进角度函数,并获取所述步进角度函数的系数矩阵;
45.根据所述调整指令,获得所述系数矩阵的赋值,并根据所述系数矩阵的赋值控制天线转动。
46.第四方面,本发明还提供了一种调整天线角度的装置,所述装置设于电机控制模块内,包括:
47.接收模块,用于接收主控制模块发送的调整指令;
48.运动控制模块,用于根据所述调整指令和预先配置的运动控制模型控制天线转动。
49.第五方面,本发明还提供了一种调整天线角度的系统,包括主控制模块、电机控制模块和至少一个天线,所述天线上设有至少一个电机,所述主控制模块与所述电机控制模块通信连接,所述主控制模块用于执行如第一方面任意一项所述的调整天线角度的方法,所述电机控制模块用于执行如第三方面任意一项所述的调整天线角度的方法。
50.优选地,所述系统还包括电池管理模块和电池,所述电池管理模块用于在系统通电时控制所述电池充电,所述电池用于在系统断电时对所述电机控制模块供电。
51.优选地,所述系统还包括显示模块,所述显示模块与所述主控制模块通信连接,所述显示模块用于指示天线的转动状态。
52.相比于现有技术,本发明具有如下有益效果:
53.本发明提供的一种调整天线角度的方法,通过步进式地探测rssi的较优值,当满足迭代终止条件时,天线角度调整结束,天线也旋转到了一个rssi更优的位置。同时,通过合适初始参数的选择,能够实现较少迭代次数,即可找到rssi更好的位置,从而实现快速寻找天线信号更强的角度。
54.本发明提供的另一种调整天线角度的方法,通过建立模型的方式进行多个电机转动角度的控制,提高了多个电机控制的同步性,也提高了控制效率,并且有利于运动控制的仿真与实现。相应地,本发明还提供了一种调整天线角度的装置和系统。
附图说明
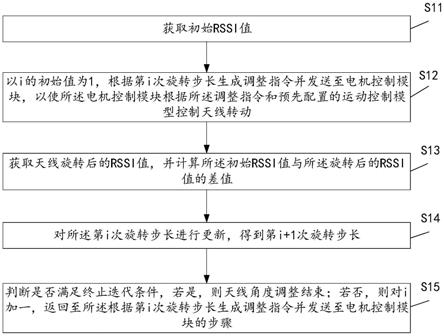
55.图1是本发明一个优选实施例提供的调整天线角度的方法流程示意图;
56.图2是本发明实施例提供的过冲现象示意图;
57.图3是本发明一个优选实施例提供的调整天线角度的装置结构示意图;
58.图4是本发明另一个优选实施例提供的调整天线角度的方法流程示意图;
59.图5是本发明一个优选实施例提供的天线控制结构示意图;
60.图6是本发明另一个优选实施例提供的调整天线角度的装置结构示意图;
61.图7是本发明一个优选实施例提供的调整天线角度的系统结构示意图;
62.图8是本发明一个优选实施例提供的电池管理模块工作示意图。
具体实施方式
63.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
64.参照图1,本发明第一实施例提供了一种调整天线角度的方法,由主控制模块执行,包括以下步骤:
65.s11,获取初始rssi值;
66.s12,以i的初始值为1,根据第i次旋转步长生成调整指令并发送至电机控制模块,以使所述电机控制模块根据所述调整指令和预先配置的运动控制模型控制天线转动;
67.s13,获取天线旋转后的rssi值,并计算所述初始rssi值与所述旋转后的rssi值的差值;
68.s14,对所述第i次旋转步长进行更新,得到第i+1次旋转步长;
69.s15,判断是否满足终止迭代条件,若是,则天线角度调整结束;若否,则对i加一,返回至所述根据第i次旋转步长生成调整指令并发送至电机控制模块的步骤。
70.在步骤s11中,需要获取初始rssi(received signal strength indicator)值,rssi值即信号强度指示值。在本实施例中,rssi已全部取绝对值,去负号,搜索rssi最小值。
71.在步骤s12中,以i的初始值为1,i为正整数,根据第i次旋转步长生成调整指令并发送至电机控制模块,所述电机控制模块根据所述调整指令和预先配置的运动控制模型控制天线转动。其中,第1次旋转步长是预设的,与实际应用的天线有关,第一次旋转使rssi数值有明显变化即可。
72.在步骤s13中,获取天线旋转后的rssi值,并计算所述初始rssi值与所述旋转后的rssi值的差值,差值记为δrssi。
73.在步骤s14中,对所述第i次旋转步长进行更新,得到第i+1次旋转步长。这一步骤是为了通过步进式地探测rssi较优值,每次探测的旋转步长与rssi关于天线角度变化的梯度相反,以此来快速寻找天线信号更强的角度。
74.在步骤s15中,需要根据所述差值、所述第i+1次旋转步长和i的值,判断是否满足终止迭代条件,若是,则天线角度调整结束;若否,则对i加一,返回至所述根据第i次旋转步长生成调整指令并发送至电机控制模块的步骤。当满足上述的迭代终止条件时,迭代终止,天线也旋转到了一个rssi更优的位置。
75.具体地,所述判断是否满足终止迭代条件,包括:
76.当所述差值的绝对值小于预设的收敛精度时,或当所述第i+1次旋转步长大于预设的旋转边界时,或当i大于或等于预设的最大迭代次数时,判定满足终止迭代条件。
77.进一步地,若不满足上述终止迭代条件,则再次控制电机转动,以带动天线角度调整,进行迭代寻优。其中,收敛精度与实际应用的天线有关。旋转边界由实际机械天线最大可达角度来决定。天线转轴大多无法连续旋转,沿同一方向旋转最多360度,一般更少。最大迭代次数可由用户决定,反映用户对于调整天线过程时间的最大容忍程度。示例性地,最大迭代次数设为8次,一次迭代约为3s。
78.进一步地,在所述得到第i+1次旋转步长之后,对所述第i+1次旋转步长进行规范
约束。在规范约束中,保证旋转步长为整数,且最小旋转步长的绝对值为2。
79.需要说明的是,在实际迭代搜索过程中,为了让δrssi尽快收敛,同时使两次迭代的差距大于优化变量rssi的波动,学习率一般设得比较大,但是这样在较陡波谷的收敛过程中由于动量积累的关系,容易产生过冲而在波谷处产生多次震荡难以收敛至最优值或离开波谷无法回来,过冲现象如下图2所示。因此,还需要设置过冲保护,来减少实际迭代过程中容易出现的波谷震荡现象。
80.为了便于对本发明的理解,下面将对本发明的一些优选实施例做更进一步的描述。
81.在一种实现方式中,判断是否发生过冲现象的过程包括:
82.根据所述差值和所述第i次旋转步长计算步长梯度;
83.判断所述步长梯度的绝对值是否大于预设的梯度阈值,若是,则判定发生过冲现象;若否,则判定没有发生过冲现象。
84.其中,步长梯度的绝对值为|δrssi/step|,δrssi表示差值,step表示所述第i次旋转步长。如果步长梯度大于预设的梯度阈值,则判定发生过冲现象;反之,则判定没有发生过冲现象。梯度阈值与实际应用的天线有关,本发明对此不做具体限定。
85.进一步地,在判定发生过冲现象时,所述对所述第i次旋转步长进行更新,得到第i+1次旋转步长包括:
86.当判定所述差值大于零时,根据所述步长梯度、预设的学习率和动量衰减因子得到更新后的动量;
87.根据所述第i次旋转步长、所述动量衰减因子和更新后的动量,得到第i+1次旋转步长;
88.当判定所述差值小于零时,将动量更新为零,并根据所述步长梯度、所述学习率和所述动量衰减因子得到第i+1次旋转步长。
89.具体地,检测到过冲之后,如果δrssi>0,则更新后的动量为:
90.m’=k*r*δrssi/step
91.第i+1次旋转步长为:
92.step’=-m
’‑
k*step
93.如果δrssi<0,,则更新后的动量为:
94.m’=0
95.第i+1次旋转步长为:
96.step’=-k*r*δrssi/step
97.其中,m’为更新后的动量,k为动量衰减因子,r为学习率,学习率是指上一次步长引起rssi的变化对这一次步长的影响率,取值影响迭代收敛的速度;δrssi为差值,step为第i次旋转步长,step’为第i+1次旋转步长,δrssi/step表示步长梯度。
98.需要说明的是,下一次的旋转步长由上一次步长的rssi关于步长梯度,也就是δrssi/step来决定。在计算step’的公式中,系数的符号表示更新之后的步长要与当前rssi的梯度方向相反。例如,若上次step>0,表示上次正向旋转了,带来的δrssi也大于0,说明rssi变大,则下次步长就要step<0来反向旋转至rssi更小的地方。
99.进一步地,在判定没有发生过冲现象时,所述对所述第i次旋转步长进行更新,得
到第i+1次旋转步长包括:
100.当判定所述差值大于零时,根据所述步长梯度、预设的学习率和动量衰减因子得到更新后的动量;
101.根据所述第i次旋转步长和所述动量衰减因子,得到第i+1次旋转步长;
102.当判定所述差值小于零时,根据所述步长梯度、所述学习率、所述动量衰减因子和预设的初始动量,得到更新后的动量;
103.对更新后的动量取相反数,得到第i+1次旋转步长。
104.具体地,在没有发生过冲现象时,如果δrssi>0,则更新后的动量为:
105.m’=k*r*δrssi/step
106.第i+1次旋转步长为:
107.step’=-k*step
108.如果δrssi<0,,则更新后的动量为:
109.m’=k*m+r*δrssi/step
110.第i+1次旋转步长为:
111.step’=-m’112.其中,m为初始动量,m=-step1,step1为第1次旋转步长;m’为更新后的动量,k为动量衰减因子,r为学习率,δrssi为差值,step为第i次旋转步长,step’为第i+1次旋转步长,δrssi/step表示步长梯度。
113.本发明提供的调整天线角度的方法,通过步进式寻找rssi较优值,每次探测的步长不仅与当前的rssi关于天线角度变化的梯度相关,还受上次旋转步长的影响,收敛速度快于一般的梯度下降法。此外,在实际迭代过程中,还引入了过冲保护,来减少实际迭代过程中容易出现的波谷震荡现象,进一步加快收敛速度,使算法只需少数几次迭代即可收敛。本发明调整天线角度时不需要建立、维护或遍历天线查询表,实时性高,效果稳定。
114.参照图3,本发明第二实施例提供了一种调整天线角度的装置,所述装置设于主控制模块内,包括:
115.数据获取模块,用于获取初始rssi值;
116.调整指令模块,用于以i的初始值为1,根据第i次旋转步长生成调整指令并发送至电机控制模块,以使所述电机控制模块根据所述调整指令和预先配置的运动控制模型控制天线转动;
117.差值计算模块,用于获取天线旋转后的rssi值,并计算所述初始rssi值与所述旋转后的rssi值的差值;
118.步长更新模块,用于对所述第i次旋转步长进行更新,得到第i+1次旋转步长;
119.迭代判断模块,用于判断是否满足终止迭代条件,若是,则天线角度调整结束;若否,则对i加一,返回至所述根据第i次旋转步长生成调整指令并发送至电机控制模块的步骤。
120.优选地,所述迭代判断模块包括:
121.迭代判断单元,用于当所述差值的绝对值小于预设的收敛精度时,或当所述第i+1次旋转步长大于预设的旋转边界时,或当i大于或等于预设的最大迭代次数时,判定满足终止迭代条件。
122.优选地,所述装置还包括:
123.步长梯度计算模块,用于根据所述差值和所述第i次旋转步长计算步长梯度;
124.过冲判断模块,用于判断所述步长梯度的绝对值是否大于预设的梯度阈值,若是,则判定发生过冲现象;若否,则判定没有发生过冲现象。
125.优选地,在判定发生过冲现象时,所述步长更新模块还用于:
126.当判定所述差值大于零时,根据所述步长梯度、预设的学习率和动量衰减因子得到更新后的动量;
127.根据所述第i次旋转步长、所述动量衰减因子和更新后的动量,得到第i+1次旋转步长;
128.当判定所述差值小于零时,将动量更新为零,并根据所述步长梯度、所述学习率和所述动量衰减因子得到第i+1次旋转步长。
129.优选地,在判定没有发生过冲现象时,所述步长更新模块还用于:
130.当判定所述差值大于零时,根据所述步长梯度、预设的学习率和动量衰减因子得到更新后的动量;
131.根据所述第i次旋转步长和所述动量衰减因子,得到第i+1次旋转步长;
132.当判定所述差值小于零时,根据所述步长梯度、所述学习率、所述动量衰减因子和预设的初始动量,得到更新后的动量;
133.对更新后的动量取相反数,得到第i+1次旋转步长。
134.优选地,所述装置还包括:
135.规范约束模块,用于对所述第i+1次旋转步长进行规范约束。
136.需要说明的是,本发明实施例提供的一种调整天线角度的装置用于执行上述实施例的一种调整天线角度的方法的所有流程步骤,两者的工作原理和有益效果一一对应,因而不再赘述。
137.参照图4,本发明第三实施例还提供了一种调整天线角度的方法,由电机控制模块执行,包括以下步骤s21-s22:
138.s21,接收主控制模块发送的调整指令;
139.s22,根据所述调整指令和预先配置的运动控制模型控制天线转动。
140.在步骤s21中,电机控制模块接收主控制模块发送的调整指令。在具体实施当中,电机控制模块包括mcu、电机驱动和电机,mcu在接收到主控制模块发出的调整指令后,发出电机控制信号,通过电机驱动控制电机转动。
141.在步骤s22中,电机控制模块根据所述调整指令和预先配置的运动控制模型控制天线转动。
142.示例性地,以4个天线,每个天线设有3个电机为例进行说明。
143.参照图5,共有4个天线,分别为天线1/2/3/4;每个天线由3个电机控制,分别为电机a/b/c;每个电机由mcu的4个gpio(general-purpose input/output,通用输入/输出口)控制,即天线由12个gpio控制,每个电机的转动角度,由gpio输出的脉冲数量决定。各天线的位置,由天线中的3个电机的转动角度决定,各天线的位置可以相同,也可以不同,即12个电机的转动角度,可能有完全相同、部分相同和完全不同等情况。若是对各电机逐一做控制,实现复杂度会随着电机数量和运动状态的增加,而成倍增加,会导致顺序靠后的电机启
动时间晚,导致各天线的运动时间不统一。因此,本实施例中采用模块化和矩阵的方式,设计电机控制方法。
144.在一种实现方式中,所述根据所述调整指令和预先配置的运动控制模型控制天线转动,包括:
145.基于天线上所有电机的转动角度,建立电机角度矩阵;
146.根据所述电机角度矩阵和天线的当前角度状态,得到当前角度矩阵;
147.根据所述电机角度矩阵和所述调整指令,得到目标角度矩阵;
148.计算所述目标角度矩阵与所述当前角度矩阵的矩阵差值,并根据所述矩阵差值控制天线转动。
149.需要说明的是,将电机的转动控制,设计成一个公共模块,这个公共模块的功能有两个,一个是控制gpio输出设定的脉冲信号,使步进电机每次转动的角度是其固有的步进角度,另一个是控制电机的转动方向,分别是顺时针转动和逆时针转动。
150.具体地,电机角度矩阵记为pi,电机a、b、c此时的角度为a
ji
、b
ji
和c
ji
,其中j=1,2,3,4,代表4个天线,i=0,1,2,3
……
,代表天线不同的位置。矩阵的行代表不同的电机,列代表不同的天线,也可以将行列互换。矩阵中的数值,代表各电机转动的角度,正负代表转动的方向(顺时针和逆时针)。将p0记为初始状态,即矩阵中的数值都是0。电机角度矩阵pi为:
[0151][0152]
当需要控制天线从当前角度矩阵p0,运行到目标角度矩阵pi,则将矩阵pi的值传递给电机控制模块;要控制天线从当前角度矩阵pm,运行到目标角度矩阵pn,则将这两个矩阵的差值传递给电机控制模块即可。
[0153]
在另一种实现方式中,所述根据所述调整指令和预先配置的运动控制模型控制天线转动,包括:
[0154]
获取每一电机的步进角度;
[0155]
根据所述步进角度,构建关于电机目标位置的步进角度函数,并获取所述步进角度函数的系数矩阵;
[0156]
根据所述调整指令,获得所述系数矩阵的赋值,并根据所述系数矩阵的赋值控制天线转动。
[0157]
具体地,每个电机都有固定的步进角度,也就是最小可转动的角度,当有3个电机时,将步进角度分别记为a,b,c。
[0158]
首先,将受步进电机控制的天线的目标位置记为p,当每一天线受3个步进电机控制时,目标位置就是3个步进电机步进角度的函数,步进角度函数p表示为:
[0159]
p=ma+nb+kc
[0160]
其中m,n,k是系数,数值大小表示转动角度的大小,正负则表示转动的方向。
[0161]
然后,当天线有多个时,天线的目标位置也有多个,分别记为p1,p2,
…
,pn,将各目标位置都以步进角度函数表示,写为如下形式:
[0162][0163]
最后,写为矩阵的形式,目标位置矩阵记为p,系数矩阵记为v,步进角度矩阵记为h,则p=vh,如下所示:
[0164][0165]
当需要控制天线运动到不同位置时,对系数矩阵v进行不同的赋值即可。
[0166]
本发明将多个电机转动角度的控制问题,按照模块化和矩阵的方式设计,有利于工程上编程实现,提高了多个步进电机控制的同步性,也提高了控制效率,将并且还将控制问题抽象成一个简洁的数学模型,有利于做运动控制的仿真与实现。
[0167]
参照图6,本发明第四实施例还提供了一种调整天线角度的装置,所述装置设于电机控制模块内,包括:
[0168]
接收模块,用于接收主控制模块发送的调整指令;
[0169]
运动控制模块,用于根据所述调整指令和预先配置的运动控制模型控制天线转动。
[0170]
优选地,所述运动控制模块包括:
[0171]
矩阵建立单元,用于基于天线上所有电机的转动角度,建立电机角度矩阵;
[0172]
当前角度单元,用于根据所述电机角度矩阵和天线的当前角度状态,得到当前角度矩阵;
[0173]
目标角度单元,用于根据所述电机角度矩阵和所述调整指令,得到目标角度矩阵;
[0174]
运动控制单元,用于计算所述目标角度矩阵与所述当前角度矩阵的矩阵差值,并根据所述矩阵差值控制天线转动。
[0175]
优选地,所述运动控制模块包括:
[0176]
步进角度获取单元,用于获取每一电机的步进角度;
[0177]
函数构建单元,用于根据所述步进角度,构建关于电机目标位置的步进角度函数,并获取所述步进角度函数的系数矩阵;
[0178]
赋值单元,用于根据所述调整指令,获得所述系数矩阵的赋值,并根据所述系数矩阵的赋值控制天线转动。
[0179]
需要说明的是,本发明实施例提供的一种调整天线角度的装置用于执行上述实施例的一种调整天线角度的方法的所有流程步骤,两者的工作原理和有益效果一一对应,因而不再赘述。
[0180]
参照图7,本发明实施例还提供了一种调整天线角度的系统,包括主控制模块、电机控制模块和至少一个天线,所述天线上设有至少一个电机,所述主控制模块与所述电机控制模块通信连接,所述主控制模块用于执行如第一实施例任意一项所述的调整天线角度
的方法,所述电机控制模块用于执行如第三实施例任意一项所述的调整天线角度的方法。
[0181]
进一步地,所述系统还包括电池管理模块和电池,所述电池管理模块用于在系统通电时控制所述电池充电,所述电池用于在系统断电时对所述电机控制模块供电。
[0182]
参照图8,电池管理模块主要是在整机产品断电后发挥作用。当整机断电后,电池继续对电机控制模块供电,使天线自动恢复到默认的闭合状态;而在整机正常工作器件,电池管理模块可以对电池充电。
[0183]
电池管理模块的工作过程如下:
[0184]
(1)在电源适配器正常上电期间,电源适配器提供总电压,对主板供电,同时经过电压转换后对mcu板供电,还经过电池充放电管理芯片对电池充电;
[0185]
(2)当电源适配器提供的总电压降低到预设阈值以下时,此时电池充放电管理芯片会控制电池输出电压,保证mcu和电机不会断电,可以继续正常工作;
[0186]
(3)mcu通过自带的adc(analogue to digital conversion,模数转换),会不断地对电源适配器提供的总电压做监控,当监控到总电压降低到预设阈值以下时,mcu会执行让电机恢复默认闭合状态的动作。在整机断电后,天线可自动恢复到默认的闭合状态,增加产品的友好度。
[0187]
进一步地,所述系统还包括显示模块,所述显示模块与所述主控制模块通信连接,所述显示模块用于指示天线的转动状态。示例性地,显示模块可以采用led和led驱动,在天线转动时,led呈现出闪烁或者呼吸效果,当天线转动到目标位置后,led可以呈现出常亮的状态,这样可以对天线覆盖角度调整是否已完成做出指示。通过led的显示,可以明确告诉用户,天线是否已调节到合适位置,提高了使用产品的便利性。
[0188]
进一步地,系统还配置有供用户使用的app,在app中会预先设置多种天线覆盖角度,用于不同使用场景的信号增强,比如平层/跃层信号增强、正面/背面信号增强和左侧/右侧信号增强。用户可以通过这些选项,实现“一键增强”的效果。
[0189]
本发明提供的系统可在以下方面应用到:
[0190]
(1)一般的无线设备和终端设备之间的通信,通过调整无线设备天线的覆盖角度,提高通信质量;当终端设备的位置发生改变时,能实时跟踪其位置变化,从而实时调整天线的角度,保证良好用户体验的连续性;
[0191]
(2)无线组网中,部分天线面向网络内部,部分天线面向终端设备,提升两个方向上的性能;
[0192]
(3)无线定位中,通过无线算法和天线转动,来实现对目标位置的追踪。
[0193]
综上,本发明提供的一种调整天线角度的方法,通过步进式地探测rssi的较优值,当满足迭代终止条件时,天线角度调整结束,天线也旋转到了一个rssi更优的位置。同时,通过合适初始参数的选择,能够实现较少迭代次数,即可找到rssi更好的位置,从而实现快速寻找天线信号更强的角度。
[0194]
此外,本发明提供的另一种调整天线角度的方法,通过建立模型的方式进行多个电机转动角度的控制,提高了多个电机控制的同步性,也提高了控制效率,并且有利于运动控制的仿真与实现。相应地,本发明还提供了一种调整天线角度的装置和系统。
[0195]
需说明的是,以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以
不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。另外,本发明提供的装置实施例附图中,模块之间的连接关系表示它们之间具有通信连接,具体可以实现为一条或多条通信总线或信号线。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
[0196]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步的详细说明,应当理解,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围。特别指出,对于本领域技术人员来说,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1