石墨舟定位机构的制作方法
1.本实用新型涉及硅片生产装置技术领域,特别涉及一种石墨舟定位机构。
背景技术:
2.太阳能是一种永不枯竭的清洁能源,储量丰富,太阳能的利用可以改善能源结构,推进新能源的快速发展。
3.各厂商生产太阳能电池片的工艺略有不同,根据需求基本包含制绒工序、扩散工序、激光掺杂工序、刻蚀工序、退火工序、背钝化工序、镀膜工序、丝网工序和分选工序。
4.石墨舟上下料机是镀膜工序最为关键的自动化设备,主要完成将镀膜后的硅片从石墨舟中卸出装入100片花篮,同时将花篮中未镀膜的硅片插入到石墨舟中。
5.石墨舟上下料机主要包括花篮上料机构、硅片上料传输机构、石墨舟搬送机构、石墨舟传输机构、石墨舟定位机构、机器人装卸片机构、硅片下料传输机构(包含色差检测模块)和花篮下料机构。
6.现有的石墨舟定位机构存在的不足之处如下:定位达不到要求,容易造成碎片、不良片、甚至损坏石墨舟等问题,并且石墨舟被固定后易发生变形。
技术实现要素:
7.针对现有技术的不足,本实用新型公开了一种石墨舟定位机构。
8.本实用新型所采用的技术方案如下:
9.一种石墨舟定位机构,包括一组相互平行的第二导轨;所述第二导轨之间嵌合多组连接组件;所述连接组件之下安装至少一个滑块;所述滑块嵌合在第一导轨之上;所述第二导轨和所述第一导轨相互垂直;所述第二导轨上的一端安装第一同步轮,所述第二导轨的另一端安装第二同步轮;所述第一同步轮和所述第二同步轮之上张紧同步带;所述第一同步轮连接驱动模块;所述驱动模块驱动所述第一同步轮转动。
10.其进一步的技术特征在于:所述驱动模块为减速电机,所述减速电机固定在安装座上;所述安装座固定在所述第二导轨的外侧。
11.其进一步的技术特征在于:所述第二导轨为型材,所述型材的两侧为凹槽;所述连接组件包括本体;所述本体的两侧分别设置第一翼缘和第二翼缘;所述第一翼缘的外侧壁设置第一卡接部;所述第二翼缘的外侧壁设置第二卡接部;所述第一卡接部和所述第二卡接部分别与一组所述第二导轨的凹槽卡合。
12.其进一步的技术特征在于:所述第一翼缘和所述本体之间、所述第二翼缘和所述本体之间呈圆弧过渡连接。
13.其进一步的技术特征在于:所述第二导轨之上安装多组传感器,相邻两组连接组件之间安装一组传感器。
14.其进一步的技术特征在于:所述传感器为第一光电感测器,所述第一光电感测器固定在所述第二导轨之上;所述第一光电感测器的发射光束和所述连接组件的长度方向相
互平行。
15.其进一步的技术特征在于:所述传感器为第二光电感测器,所述第二光电感测器的发射光束和所述连接组件的长度之间有夹角。
16.其进一步的技术特征在于:一组所述第二导轨的第一同步轮之间通过同步转轴连接。
17.其进一步的技术特征在于:所述第二导轨的顶部固定在轨道固定板之上。
18.本实用新型的有益效果如下:
19.本实用新型通过连接组价保证石墨舟在传输过程中不偏离既定轨道,消除石墨舟与第二导轨之间的间隙对定位精度的影响,从而达到降低碎片率的目的,提高设备运行的稳定性和良品率。
20.本实用新型保证传输过程中输送线和石墨舟内的碎片明显减少,石墨舟的碎片率也由千分之一降低到万分之四,达到客户的要求。
附图说明
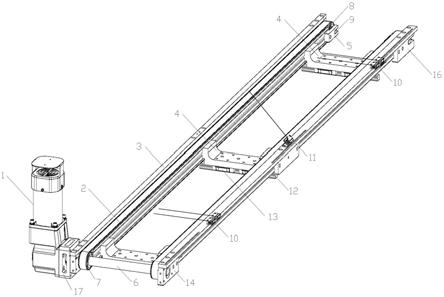
21.图1为本实用新型的第一视角的结构示意图。
22.图2为本实用新型的第二视角的结构示意图。
23.图3为本实用新型的侧视图。
24.图4为本实用新型的俯视图。
25.图5为连接组件的结构示意图。
26.图6为连接组件的主视图。
27.图7为连接组件的侧视图。
28.图中:1、驱动模块;2、同步带;3、轨道固定板;4、连接组件;401、第一翼缘;402、第一卡接部;403、本体;404、第二翼缘;405、第二卡接部;5、第一同步轮固定板;6、同步转轴;7、第一同步轮;8、第二同步轮;9、固定轴;10、第一光电感测器;11、第二光电感测器;12、第一导轨;13、滑块;14、第二同步轮固定板;15、第二导轨;16、第三同步轮固定板;17、安装座。
具体实施方式
29.关本实用新型的前述及其他技术内容、特点与功效,在以下配合参考附图对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本实用新型,此外,在全部实施例中,相同的附图标号表示相同的元件。
30.下面结合附图,说明本实施例的具体实施方式。
31.图1为本实用新型的第一视角的结构示意图,图2为本实用新型的第二视角的结构示意图,图3为本实用新型的侧视图,图4为本实用新型的俯视图。结合图1~图4,一种石墨舟定位机构,包括一组相互平行的第二导轨15。第二导轨15的顶部固定在轨道固定板3之上。第二导轨15之间嵌合多组连接组件4。本实施例中,第二导轨15之间嵌合三组连接组件4,相邻两组连接组件4之间间距相同。三组连接组件4可以满足对石墨舟的承载和定位。或者,连接组件4的数量根据石墨舟的长度设计。
32.连接组件4之下安装至少一个滑块13。本实施例中,连接组件4之下安装两个滑块
13。滑块13嵌合在第一导轨12之上。两个滑块13等间距设置在第一导轨12之上。第二导轨15和第一导轨12相互垂直。第二导轨15上的一端安装第一同步轮7,第二导轨15的另一端安装第二同步轮8。一组第二导轨15的第一同步轮7之间通过同步转轴6连接。第一同步轮7通过销轴固定在第二同步轮固定板14之上,第二同步轮8通过固定轴9固定在第一同步轮固定板5和第三同步轮固定板16之间。
33.第一同步轮7和第二同步轮8之上张紧同步带2。第一同步轮7连接驱动模块1。驱动模块1驱动第一同步轮7转动。本实施例中,驱动模块1为减速电机,减速电机固定在安装座17上。安装座17固定在第二导轨15的外侧。
34.图5为连接组件的结构示意图,图6为连接组件的主视图,图7为连接组件的侧视图。结合图5~图7,第二导轨15为型材,型材的两侧为凹槽。连接组件4包括本体403。本体403的两侧分别设置第一翼缘401和第二翼缘404。第一翼缘401的外侧壁设置第一卡接部402。第二翼缘404的外侧壁设置第二卡接部405。第一卡接部402和第二卡接部405分别与一组第二导轨15的凹槽卡合。
35.第一翼缘401和本体403之间、第二翼缘404和本体403之间呈圆弧过渡连接。圆弧过渡连接贴合石墨舟,保证石墨舟被固定后不发生变形。
36.第二导轨15之上安装多组传感器,相邻两组连接组件4之间安装一组传感器。优选地,传感器为第一光电感测器10,第一光电感测器10固定在第二导轨15之上。第一光电感测器10的发射光束和连接组件4的长度方向相互平行。或者,传感器为第二光电感测器11,第二光电感测器11的发射光束和连接组件4的长度之间有夹角。优选地,夹角的度数为45
°
。
37.本实用新型的工作原理如下:
38.启动驱动模块1,减速电机的输出轴驱动一侧第二导轨15的第一同步轮7转动,一侧第二导轨15的第一同步轮7通过同步转轴6将动力传递给另一侧第二导轨15的第一同步轮7,同时,第一同步轮7通过同步带2将动力传递给第二同步轮8,使得石墨舟沿第二导轨15的安装方向运动。
39.连接组价4保证石墨舟在传输过程中不偏离既定轨道,消除石墨舟与第二导轨1之间的间隙对定位精度的影响。
40.在本实用新型实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
41.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在不违背本实用新型的基本结构的情况下,本实用新型可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1