一种自动分合式集电器的制作方法
1.本实用新型属于集电器供电技术领域,尤其涉及一种自动分合式集电器。
背景技术:
2.目前,对于需要智能传输、长距离走行的移动设备实施连续供电的常规技术方案是蓄电池供电、集电器供电,尤其是提供交流电力,例如电动汽车、起重机等设备用电,特点是电力供给贯穿走行全程。当走行区间很长,并且仅需要在其中的某个特定地点进行受电或充电时,只能依靠人工插拔插头实施受电,如炼钢厂鱼雷罐车折铁作业就需要人工插拔插头实施受电,即延长了折铁作业时间,又危险、费力。
技术实现要素:
3.为克服现有技术的不足,本实用新型的目的是提供一种自动分合式集电器,能够安装在需要受电、充电位置处,解决需要人工插拔插头连接的问题。
4.为实现上述目的,本实用新型通过以下技术方案实现:
5.一种自动分合式集电器,包括滑触线、集电器、集电器底座、电动推杆,滑触线安装在有受电、充电需求的移动设备上,集电器底座固定位于受电、充电位置处的基础框架上,集电器与集电器底座连接,集电器通过电动推杆带动在集电器底座上往复滑动;电动推杆的固定端与集电器底座铰接,电动推杆的移动端与集电器铰接。
6.所述的滑触线包括导板一、导板二、螺杆、绝缘体一、滑触线支架;导板一与导板二按行布置,导板二布置在最低层,导板一以导板二为基准依次向上排布,导板一的数量为1~20个;导板一、导板二的非工作面均与螺杆的一端焊接,螺杆的另一端与绝缘体一固定连接;绝缘体一的另一端固定到滑触线支架上。
7.所述的集电器包括集电器车架、轴承、行程开关一、绝缘体二、集电臂、集电滑块、集电器动力控制箱;轴承连接在集电器车架上,使集电器能够在集电器底座上往复移动;行程开关一固定连接在集电器车架上,行程开关一按行布置,且与导板一对应;绝缘体二的一端与行程开关一固定连接,绝缘体二的另一端与集电臂的内端紧固,并引出导线四;导线四的另一端与集电器动力控制箱的输出端子连接;集电滑块与集电臂的外端铰接。
8.所述的集电滑块为多面体棱柱形状。
9.所述的集电器底座包括底座、行程开关二、绝缘体三、摆臂、滑块、导线五、导线六,行程开关二固定在底座上,行程开关二常开触点的两端分别与导线五、导线六连接;绝缘体三的一端与行程开关二固定,另一端与摆臂的内端固定连接;滑块与摆臂的外端铰接。
10.还包括继电器、电动推杆动力电源,电动推杆动力电源输出端正极与继电器常开触点一、继电器常闭触点一的输入端连接,电动推杆动力电源输出端负极与继电器电源负极连接、继电器常开触点二、继电器常闭触点二输入端连接。
11.与现有技术相比,本实用新型的有益效果是:
12.本实用新型实现了集电器与滑触线的自动连接与分离,实现了长距离走行设备的
固定地点自动受电、充电功能,取消了人工插拔插头实施受电、充电的繁重危险作业,提高了生产效率,具有设计合理、实用性强、结构简单、动作平稳可靠的特点。
附图说明
13.图1为分合式集电器分体状态下主视图。
14.图2为分合式集电器分体状态下俯视图。
15.图3为分合式集电器合体状态下主视图。
16.图4为分合式集电器合体状态下俯视图。
17.图5为滑触线主视图。
18.图6为滑触线俯视图。
19.图7为集电器主视图。
20.图8为集电器俯视图。
21.图9为集电器底座主视图。
22.图10为集电器底座俯视图。
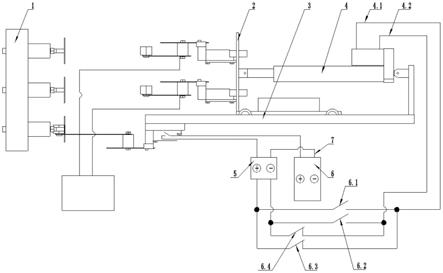
23.图中:滑触线1、集电器2、集电器底座3、电动推杆4、导线一4.1、导线二4.2、电动推杆动力电源5、继电器6、继电器常开触点一6.1、继电器常开触点二6.2、继电器常闭触点一6.3、继电器常闭触点二6.4、导线三7、导板一1.1、导板二1.2、螺杆1.3、绝缘体一1.4、滑触线支架1.5、螺栓一1.6、螺母一1.7、集电器车架2.1、螺栓轴承2.2、行程开关一2.3、绝缘体二2.4、集电臂2.5、集电滑块2.6、螺栓二2.7、螺钉一2.8、导线四2.9、集电器动力控制箱2.10、底座3.1、行程开关二3.2、螺钉一3.3、绝缘体三3.4、螺栓三3.5、摆臂3.6、滑块3.7、行程开关二常开触点3.8、导线五3.9、导线六3.10。
具体实施方式
24.下面结合说明书附图对本实用新型进行详细地描述,但是应该指出本实用新型的实施不限于以下的实施方式。
25.见图1-图10,一种自动分合式集电器,包括滑触线1、集电器2、集电器底座3、电动推杆4;滑触线1安装在有受电、充电需求的移动设备上,集电器底座3固定在受电、充电位置处基础框架上,集电器2坐在集电器底座3上,电动推杆4的固定端与集电器底座3铰接,电动推杆4的移动端与集电器2铰接,导线一4.1与继电器常开触点一6.1、常闭触点一6.3的输出端连接,导线二4.2与继电器常开触点二6.2、常闭触点二6.4的输出端连接。导线一4.1、导线二4.2另一端与电动推杆4的接线端子连接;当然,还可以通过其它驱动方式替代电动推杆4的作用和位置,如使用液压缸、气缸、减速机驱动齿轮齿条传动等手段。
26.见图1-图10所示,电动推杆动力电源5输出端正极与导线五3.9、继电器常开触点一6.1、继电器常闭触点一6.3的输入端连接,电动推杆动力电源5输出端负极与继电器6电源负极通过导线三7连接、继电器常开触点二6.2、继电器常闭触点二6.4输入端连接,继电器6电源正极与导线六3.10连接。
27.见图5、图6所示,滑触线1由导板一1.1、导板二1.2、螺杆1.3、绝缘体一1.4、滑触线支架1.5、螺栓一1.6和螺母一1.7组成;导板一1.1和导板二1.2按行布置,导板二1.2布置在最低层,导板一1.1以导板二1.2为基准依次向上排布,导板一1.1的数量为1~20个;导板一
1.1和导板二1.2的非工作面均与螺杆1.3的一端焊接,每个导板一1.1、导板二1.2上均焊接2个螺杆1.3,螺杆1.3的另一端与绝缘体一1.4螺纹连接,并通过螺母一1.7紧固;绝缘体一1.4的另一端通过螺栓一1.6紧固到滑触线支架1.5上。
28.见图7、图8所示,集电器2由集电器车架2.1、螺栓轴承2.2、行程开关一2.3、绝缘体二2.4、集电臂2.5、集电滑块2.6、螺栓二2.7、螺钉一2.8、导线四2.9和集电器动力控制箱2.10组成;螺栓轴承2.2安装在集电器车架2.1上,用作集电器1走行车轮;行程开关一2.3通过螺钉一2.8安装在集电器车架2.1上,行程开关一2.3按行布置,布置的数量、高度与导板一1.1对应;绝缘体二2.4的一端通过螺栓二2.7紧固到行程开关一2.3上,绝缘体二2.4的另一端通过螺栓二2.7与集电臂2.5的内端紧固,同时引出导线四2.9;导线四2.9的另一端与集电器动力控制箱2.10的输出端子连接;集电滑块2.6与集电臂2.5的外端铰接,集电滑块2.6为多面体棱柱形状。
29.见图9、图10所示,集电器底座3由底座3.1、行程开关二3.2、螺钉一3.3、绝缘体三3.4、螺栓三3.5、摆臂3.6、滑块3.7、行程开关二常开触点3.8、导线五3.9和导线六3.10组成;行程开关二3.2通过螺钉一3.3安装在底座3上,行程开关二3.2的安装高度与导板二1.2对应,行程开关二常开触点3.8的两端分别与导线五3.9、导线六3.10连接;绝缘体三3.4的一端通过螺栓三3.5紧固到行程开关二3.2上,绝缘体三3.4的另一端通过螺栓三3.5与摆臂3.6的内端紧固;滑块3.7与摆臂3.6的外端铰接。
30.见图1、图2所示,在需要受电、充电的移动设备未到达受电、充电位置时,集电器2与滑触线1处于分开状态,电动推杆4处于后位,在电动推杆4的带动下集电器2也处于后位。需要受电、充电的移动设备上行,导板二1.2触及到滑块3.7,当压迫行程开关二3.2使其行程开关二常开触点3.8闭合后,电动推杆4前进至前位,同时带动集电器2前行使集电滑块2.6与导板一1.1可靠接触,操作集电器动力控制箱2.10内的动力电送至导板一1.1,从而实现给需要受电、充电的移动设备送电的目的。需要受电、充电的移动设备下行,导板二1.2与滑块3.7分离后,行程开关二常开触点3.8恢复常开状态,电动推杆4再次后退至后位,同时带动集电器2后退至后位,见图3、图4所示,从而实现给需要受电、充电的移动设备停止送电的目的。当然,还可以通过其它驱动方式替代电动推杆4的作用和位置,如使用液压缸、气缸等手段。
31.本实用新型实现了集电器与滑触线的自动连接与分离,实现了长距离走行设备的固定地点自动受电、充电功能,取消了人工插拔插头实施受电、充电的繁重危险作业,提高了生产效率,具有设计合理、实用性强、结构简单、动作平稳可靠等特点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1