一种全自动端子组装机的制作方法
1.本实用新型涉及端子组装机技术领域,具体为一种全自动端子组装机。
背景技术:
2.自动化端子组装机通俗化地讲,装配流水线是指将货品的多个零部件依据紧配、扣锁、螺钉连接、粘合、铆合、电焊焊接等方式构成到一起得到与其的工件,在对端子的组装过程中会使用到自动组装机。
3.现有的端子组装机在组装过程中需手动进行配合工作,效率低下,无法自主化进行工作,同时不便对物品进行流水线式加工配合,存在使用局限性的问题。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种全自动端子组装机,解决了上述背景技术中提出现有的端子组装机在组装过程中需手动进行配合工作,效率低下,无法自主化进行工作,同时不便对物品进行流水线式加工配合,存在使用局限性的问题。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:一种全自动端子组装机,包括机体和端子震动盘,所述机体的顶部设置有指示灯,且指示灯外部的一端安装有控制器,所述控制器末端外部设置有导槽,且导槽外部的一端安装有第三夹取机械手,所述第三夹取机械手外部的一端设置有第二螺丝锁付器,且第二螺丝锁付器的底部安装有第一螺丝震动盘,所述第一螺丝震动盘外部的一端设置有传输带,且传输带外部的上端安装有第一螺丝锁付器,所述第一螺丝锁付器外部的一端安装有左右端子压入器,所述端子震动盘位于机体外部的一端,所述传输带的内部设置有端子工件,且传输带外部的一端设置有电机,所述导槽顶部外部安装有成品摆放器,所述机体靠近端子震动盘的一端设置有第二传感器,且第二传感器外部的一端安装有第一夹取机械手,所述第一夹取机械手外部的一端设置有第二夹取机械手。
6.可选的,所述左右端子压入器包括右端子震动盘和左端子震动盘,且右端子震动盘外部的一端设置有左端子震动盘。
7.可选的,所述左端子震动盘与右端子震动盘相平行,且右端子震动盘的高度和右端子震动盘的高度一致。
8.可选的,所述第三夹取机械手包括第一传感器和端子盖震动盘,且第一传感器外部一端设置有端子盖震动盘,所述左端子震动盘外部的一端安装有第二螺丝震动盘。
9.可选的,所述端子盖震动盘的高度和右端子震动盘和左端子震动盘的高度一致,且端子盖震动盘和第一传感器紧密贴合。
10.可选的,所述端子工件通过传输带和电机构成传动结构,且端子工件之间均为等距离分布。
11.可选的,所述导槽的形状为“匚”字型结构,且导槽与机体的表面之间的夹角为45
°
。
12.可选的,所述第一螺丝锁付器和第二螺丝锁付器之间相互平行,且第一螺丝锁付器和第二螺丝锁付器与机体的水平面相垂直。
13.本实用新型提供了一种全自动端子组装机,具备以下有益效果:
14.能够对端子工件进行自动的传送,同时传送结构居于机体内部一侧,从而可为其它对端子组装的部件提供了充足的组装面积,且可自动对物品进行组装、输送和成品摆放,自动化流水线式进行。
15.1.该一种全自动端子组装机,能够利用第一夹取机械手和第二夹取机械手的设计可对放置在传输带外部表面的端子工件进行夹取,便于对端子工件进行加工处理,且两个夹取机械手的设计可不间断的对端子工件进行夹取加工处理,具有持续性,可有效提高对端子工件的加工效率;
16.2.该一种全自动端子组装机,利用左右端子压入器、右端子震动盘、左端子震动盘,震动盘的设计可通过通过振动将无序的工件自动有序定向排列整齐、准确地输送到下道工序,解决上料排序等问题,可取代人工摆放,省时省力;
17.3.该一种全自动端子组装机,通过第三夹取机械手、第一传感器和端子盖震动盘的设计,可通过端子盖震动盘对对物品排列整齐,为对物品的上料提供方便,同时进一步的为第三夹取机械手对物品的夹取提供方便,便于第三夹取机械手快速准确的夹取物品。
附图说明
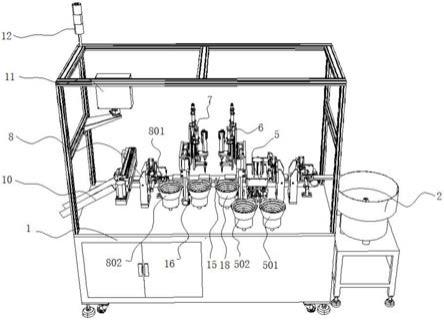
18.图1为本实用新型立体结构示意图;
19.图2为本实用新型后视立体结构示意图;
20.图3为本实用新型图2中a处放大结构示意图。
21.图中:1、机体;2、端子震动盘;3、第一夹取机械手;4、第二夹取机械手;5、左右端子压入器;501、右端子震动盘;502、左端子震动盘;6、第一螺丝锁付器;7、第二螺丝锁付器;8、第三夹取机械手;801、第一传感器;802、端子盖震动盘;9、成品摆放器;10、导槽;11、控制器;12、指示灯;13、电机;14、端子工件;15、传输带;16、第一螺丝震动盘;17、第二传感器;18、第二螺丝震动盘。
具体实施方式
22.请参阅图1至图3,本实用新型提供技术方案:一种全自动端子组装机,包括机体1和端子震动盘2,机体1的顶部设置有指示灯12,且指示灯12外部的一端安装有控制器11,控制器11末端外部设置有导槽10,且导槽10外部的一端安装有第三夹取机械手8,第三夹取机械手8外部的一端设置有第二螺丝锁付器7,且第二螺丝锁付器7的底部安装有第一螺丝震动盘16,第一螺丝震动盘16外部的一端设置有传输带15,且传输带15外部的上端安装有第一螺丝锁付器6,第一螺丝锁付器6和第二螺丝锁付器7之间相互平行,且第一螺丝锁付器6和第二螺丝锁付器7与机体1的水平面相垂直,第一螺丝锁付器6外部的一端安装有左右端子压入器5,端子震动盘2位于机体1外部的一端,传输带15的内部设置有端子工件14,且传输带15外部的一端设置有电机13,端子工件14通过传输带15和电机13构成传动结构,且端子工件14之间均为等距离分布,导槽10顶部外部安装有成品摆放器9,机体1靠近端子震动盘2的一端设置有第二传感器17,且第二传感器17外部的一端安装有第一夹取机械手3,第
一夹取机械手3外部的一端设置有第二夹取机械手4;
23.具体操作如下,机体1顶部设有指示灯12,实现机器生产情况的实时监视,机体1一侧还设有控制器11,实现机器全自动生产,右端子震动盘501和左端子震动盘502连接左右端子压入器5,向其传输左右端子原件,第二螺丝震动盘18与第一螺丝锁付器6连接,第二螺丝震动盘18与第二螺丝锁付器7连接,使螺丝原件输送至第一螺丝锁付器6和第二螺丝锁付器7,第一传感器801与端子盖震动盘802连接,使端子盖原件输送至第一传感器801且被第一传感器801感应,电机13安装于机体1上且通过皮带轮与传输带15相配合,实现端子工件14的运输,端子震动盘2向第二传感器17传输端子原件,第二传感器17检测到端子震动盘2传输来的端子原件,配合第一夹取机械手3通过其所设气缸工作,将端子原件夹取放至传输带15上,右端子震动盘501和左端子震动盘502向左右端子压入器5传输左、右端子原件,左右端子压入器5工作,配合第二夹取机械手4将左、右端子原件压入端子工件14内,第一螺丝震动盘16和第二螺丝震动盘18向第一螺丝锁付器6和第二螺丝锁付器7传输螺丝原件,第一螺丝锁付器6和第二螺丝锁付器7检测到端子工件14时,将螺丝锁付紧固在端子工件14上,第一传感器801检测到端子盖震动盘802传输来的端子盖原件,配合第三夹取机械手8通过其所设气缸工作,将端子盖原件夹取放至端子工件14,成品摆放器9将测到端子工件14,将成品端子工件14摆放至导槽10中。
24.如图1和图3所示,左右端子压入器5包括右端子震动盘501和左端子震动盘502,且右端子震动盘501外部的一端设置有左端子震动盘502,左端子震动盘502与右端子震动盘501相平行,且右端子震动盘501的高度和右端子震动盘501的高度一致;
25.利用左右端子压入器5、右端子震动盘501、左端子震动盘502,震动盘的设计可通过通过振动将无序的工件自动有序定向排列整齐、准确地输送到下道工序,解决上料排序等问题,可取代人工摆放,省时省力。
26.如图1和图3所示,第三夹取机械手8包括第一传感器801和端子盖震动盘802,且第一传感器801外部一端设置有端子盖震动盘802,端子盖震动盘802的高度和右端子震动盘501和左端子震动盘502的高度一致,且端子盖震动盘802和第一传感器801紧密贴合;
27.通过第三夹取机械手8、第一传感器801和端子盖震动盘802的设计,可通过端子盖震动盘802对对物品排列整齐,为对物品的上料提供方便,同时进一步的为第三夹取机械手8对物品的夹取提供方便,便于第三夹取机械手8快速准确的夹取物品。
28.如图1和图2所示,导槽10的形状为“匚”字型结构,且导槽10与机体1的表面之间的夹角为45
°
;
29.能够在对成品摆放器9将测到端子工件14,将成品端子工件14摆放至导槽10中时,利用导槽10结构形状的设计更有利于物品的引导,有效避免物品移动时向掉落外部,同时导槽10倾斜结构的设计有利于物品的移动。
30.综上,该一种全自动端子组装机,使用时,机体1顶部设有指示灯12,实现机器生产情况的实时监视,机体1一侧还设有控制器11,实现机器全自动生产,右端子震动盘501和左端子震动盘502连接左右端子压入器5,向其传输左右端子原件,第二螺丝震动盘18与第一螺丝锁付器6连接,第二螺丝震动盘18与第二螺丝锁付器7连接,使螺丝原件输送至第一螺丝锁付器6和第二螺丝锁付器7;第一传感器801与端子盖震动盘802连接,使端子盖原件输送至第一传感器801且被第一传感器801感应,电机13安装于机体1上且通过皮带轮与传输
带15相配合,实现端子工件14的运输;
31.然后端子震动盘2向第二传感器17传输端子原件,第二传感器17检测到端子震动盘2传输来的端子原件,配合第一夹取机械手3通过其所设气缸工作,将端子原件夹取放至传输带15上,右端子震动盘501和左端子震动盘502向左右端子压入器5传输左、右端子原件,左右端子压入器5工作,配合第二夹取机械手4将左、右端子原件压入端子工件14内,第一螺丝震动盘16和第二螺丝震动盘18向第一螺丝锁付器6和第二螺丝锁付器7传输螺丝原件,第一螺丝锁付器6和第二螺丝锁付器7检测到端子工件14时,将螺丝锁付紧固在端子工件14上,第一传感器801检测到端子盖震动盘802传输来的端子盖原件,配合第三夹取机械手8通过其所设气缸工作;
32.最后将端子盖原件夹取放至端子工件14,成品摆放器9将测到端子工件14,将成品端子工件14摆放至导槽10中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1