一种遥控器用磁感控制结构的制作方法
1.本实用新型涉电子通信领域,特别涉及一种遥控器用磁感控制结构。
背景技术:
2.目前,对于遥控器的控制,大部分还是利用按键进行触发,以达到控制的效果。但是传统的按键控制,一方面涉及的结构相对复杂,包括键帽、硅胶按键以及按键板,才能向控制模块发出信号,并且利用该遥控器控制是需要选择对应的按键控制,不利于盲操作,特别是在控制音量、更换频道等一些需要不断输入同一个信号的场景中,不断地按压同一个按键会使得使用者疲劳。另外,在长时间的使用过程中,硅胶键错位、按键板失灵导致遥控器控制失灵的事故多有发生。现有技术中,如中国实用新型专利201811554176.6,利用旋钮控制电压进行相关功能的无级调节,但是这种电压方式不适应于小型的遥控器上进行调节,同时因为遥控器属于常用电器,因此利用这种方式会容易发生误触发的问题。
3.因此,传统的按键按键遥控器虽然技术成熟,现有技术中也有一定的改良,但是在遥控器这个领域的现有控制方式上,仍存在着一定的缺陷。
技术实现要素:
4.本实用新型为了解决上述技术问题,提供了一种遥控器用磁感控制结构,包括有第一壳体、控制齿轮、磁铁、磁感应模块、pcb板和第二壳体,所述的磁铁设置在控制齿轮上,所述的pcb板设置在第一壳体和第二壳体之间,所述的第一壳体和第二壳体能够相互配合连接,在两者之间形成容纳空间,所述的控制齿轮设置在容纳空间内,所述的控制齿轮能够在容纳空间内绕一固定轴转动,所述的磁感应模块设置在pcb板被磁铁可转动扫过的圆面或圆环面上。使用者通过转动控制齿轮,带动磁铁转动,因为磁铁转动会产生磁场的变化,而磁感应模块又设置在磁铁转动扫过的圆面或者圆环面上,因此对于磁铁转动的磁通量变化更大,通过磁感应模块将磁通量的变化量转化为电信号,从而实现转动控制齿轮进行电信号的控制。上述结构中,一方面转动模块为纯机械结构,使用寿命高、结构简单和使用安全;另一方面,通过将磁感应变化转化为电信号,可以对磁感应模块进行设置,即磁通量的变化达到多少才触发控制效果,能够通过设置控制逻辑避免误触发控制事件的发生。
5.优选的,所述的磁铁为圆环形磁铁,所述的磁铁设置在控制齿轮靠近pcb 板的一侧,所述的圆环形磁铁与控制齿轮同心设置,所述的磁感应模块设置在 pcb板被圆环形磁铁可转动扫过的圆面上。为了增大磁感应模块在磁铁转动时的磁通量变化,磁感应模块应当尽可能地靠近磁铁设置,因此将磁感应模块设置在圆环形磁铁所扫过的圆面上,能够最大限度地检测到磁通量的变化,使得控制精确、灵敏。
6.优选的,所述的控制指轮上设置有向内凹陷的容纳位,所述的圆环形磁铁能够设置在容纳位内。圆环形磁铁设置在控制齿轮的容纳位内,能够使得控制齿轮与圆环形磁铁并为一体,能够更好地利用空间,减小整体控制结构的厚度。
7.优选的,所述的容纳位的侧壁上还设置有卡定凸起。在侧壁上的卡定凸起能够与
圆环形磁铁的侧壁抵接,使得圆环形磁铁能够卡定在容纳位内,在控制齿轮转动的同时能够更精确地带动圆环形磁铁进行旋转。
8.优选的,所述的第二壳体上设置有多个端部为球面的第一支撑柱,所述的第一支撑柱穿过pcb板,所述的第一支撑柱端部与控制齿轮接触,所述的第一支撑柱端部略高于pcb板。第一支撑柱略高于pcb板,是为了留有足够的空间给予pcb板上的电子元件进行容纳,第一支撑柱的端部为球面,使得其与控制齿轮进行接触时,仅有一个点与控制齿轮进行接触,使得在第一支撑柱与控制齿轮接触面积最小的情况下,对接触齿轮起到限位和支撑的作用。接触面积小,使得齿轮横向转动时受到的阻力小,更便于使用者对控制齿轮的使用控制。
9.优选的,所述的第二壳体上还设置有第二支撑柱,所述的第二支撑柱为中空的圆弧状柱体,其端部为光滑的曲面,所述的第二支撑柱与圆环形磁铁接触,所述的第二支撑柱高度与第一支撑柱高度相同。第二支撑柱端部为光滑的曲面,能够使得控制齿轮在转动带动磁铁转动时,减少对磁铁转动的阻力,从而减小转动控制齿轮时的阻力,采用圆弧状的中空的主体,能够使得圆弧的弧边更好地对圆环形磁铁进行支撑、限位。
10.优选的,所述的pcb板具有向第二支撑柱缺口方向的凸出位置,所述的磁感应模块设置在该凸出位置上。因为磁感应模块应当尽可能地靠近磁铁设置,而第二支撑柱需要对圆环形磁铁进行支撑,占用了部分圆环形磁铁转动扫过的圆面,因此利用第二支撑柱中空的圆弧状柱体的侧边缺口,将pcb板延伸进入缺口中形成凸出位置,将磁感应模块设置在该凸出位置上,能够更使得磁感应模块完全设置在圆环形磁铁转动扫过的圆面,同时不影响第二支撑柱对圆环形磁铁支撑的效果。
11.优选的,所述的控制指轮上的容纳位中心设置有下转轴,所述的下转轴穿过圆环形磁铁中心,设置在第二支撑柱中空位置内,所述的下转轴直径、圆环形磁铁中心直径和第二支撑柱中空直径三者的直径相互匹配。
12.优选的,所述的第一壳体靠近控制齿轮的一侧上设置有圆状的限位环,所述的第一壳体靠近控制齿轮的一侧上设置有圆状的限位环,所述的控制齿轮上设置有限位凸台,所述的限位环能够与限位凸台配合。限位环能够与限位凸台配合,能够将控制齿轮限定在固定位置,保证控制结构的可靠性。
13.优选的,所述的第一壳体上还设置有转轴孔,所述的控制齿轮的限位凸台上设置有上转轴,所述的上转轴能够与转轴孔配合。
14.本实用新型具有如下技术效果:
15.1、控制结构简单。整体结构上,采用控制齿轮内嵌入磁铁的结构,而磁感应模块设置在磁铁转动扫过位置的下方,通过磁变化转换成电信号,从而实现控制,相对于原始的按键结构结构简单,成本低。
16.2、控制调节效果良好。磁铁及磁感应模块设置的位置经过设计,能够敏锐、准确地捕捉到磁通量的变化,使得转动控制齿轮的控制更灵敏,不易发生因为磁通量变化过小,使得调节失败,或者是磁通量过大,使得调节过于灵敏,调节跨度过大的问题。
17.3、结合软件能够实现防误触功能。对于本实用新型的机构,还可以结合软件对磁通量阈值进行设置,保证转动齿轮在转动一定角度后,才触发控制事件,防止误触事件的发生。
18.4、操作方面。实际使用时,只需要将转动控制齿轮,在转动一定角度后高于设定的磁通量阈值后,就会触发一次设置事件,类似控制音量、更换频道等一些需要不断输入同一个信号的场景,就能快速,从容地进行控制。
附图说明
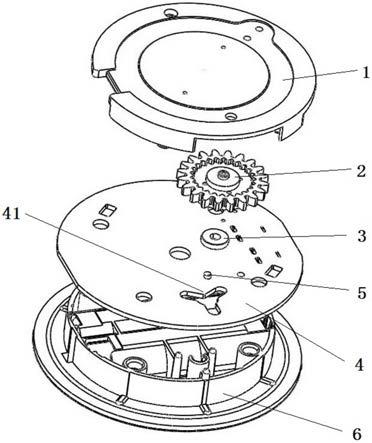
19.图1为本专利实施例1中的结构爆炸图。
20.图2为本专利实施例1中的控制齿轮第一视角结构图。
21.图3为本专利实施例1中的控制齿轮第二视角结构图。
22.图4为本专利实施例1中的第一壳体结构图。
23.图5为本专利实施例1中的第二壳体结构图。
24.图6为图5中a部分的放大图。
25.图7为本专利实施例1中的组合结构图。
26.图8为图7中沿着b-b剖面线剖开的结构图。
27.其中1为第一壳体,11为限位环,12为转轴孔,2为控制齿轮,21为容纳位,22为卡定凸起,23为限位凸台,24为上转轴,25为下转轴,3为圆环形磁铁,4为pcb板,41为凸出位置,5为磁感应模块,6为第二壳体,61为第一支撑柱,62为第二支撑柱。
具体实施方式
28.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征更易被本领域技术人员理解,从而对本实用新型的保护范围作出更为清楚的界定。
29.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”“内”、“外”、“头”、“尾”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.实施例1:
31.本实施例中,遥控器用磁感控制结构的具体结构如附图1所示,包括有第一壳体1、控制齿轮2、圆环形磁铁3,pcb板4和第二支撑柱62,pcb板4设置设置在第一壳体1和第二壳体6之间,在第一壳体1和第二壳体6配合后,还形成一个容纳空间,容纳空间位于pcb板4和第一壳体1之间,控制齿轮2设置在该容纳空间内。圆环形磁铁3设置在控制齿轮2的下方,磁感应模块5设在在磁铁下方。
32.具体的,如附图2和附图3所示,控制齿轮2一面具有限位凸台23,限位凸台23具体为圆柱结构,其中心点与控制齿轮2的中心点重合,在限位凸台23的上方,还设置有上转轴24,上转轴24设置在限位凸台23的中心上。在控制齿轮 2的另一面,设置有容纳位21,容纳位21的大小与圆环形磁铁3的大小匹配,同时在容纳位21侧壁上还设置有四个卡定凸起22,卡定凸起22均匀分布在容纳位21的侧壁上。在容纳位21内,还设置有下转轴25,下转轴25的中心点与控制齿轮2的中心点重合。上述的圆环形磁铁3的中空直径,与下转轴25的直径相互匹配,使得圆环形磁铁3能够穿过下转轴25,通过圆环形磁铁3外周与容纳位21匹配,通过卡定凸起22固定在容纳位21内。
33.如附图4所示,第一壳体1上设置在限位环11,限位环11内直径恰好与限位凸台23
的直径匹配,第一壳体1上还设置有转轴孔12,能够与控制齿轮2的上转轴24匹配。即上转轴24穿入转轴孔12,此时限位凸台23恰好设置在限位环11内。
34.如附图5和附图6所示,第二壳体6上设置有多个对控制齿轮2底部进行支撑的结构,包括有第一支撑柱61和第二支撑柱62,第一支撑柱61与第二支撑柱 62均穿过pcb板4,本实施例中,第一支撑柱61具体结构为柱状结构,其端部为球面结构,第一支撑柱61共有设置有三个,三个第一支撑柱61共圆设置,使得三个第一支撑柱61的端部能够与控制齿轮2接触。公园设置能够更平衡地对控制齿轮2进行支撑,球面的端部能够以最小的接触面积与控制齿轮2进行接触,减小在横向转动控制齿轮2时所产生的摩擦力,便于控制齿轮2转动。第二支撑柱62为中空的圆弧状的柱状结构,即类“c”字形的结构,其端部与圆环形磁铁 3接触。其高度与第一支撑柱61高度相同,能够保证控制齿轮2的平衡。第二支撑柱62的端部为曲面结构,即与圆环形磁铁3接触呈线状,能够最大程度减小接触面。另外,第二支撑柱62的中空直径略大于控制齿轮2的下转轴25的直径,使得下转轴25能够伸入第二支撑柱62的中空位置进行固定。
35.如附图1所示,磁感应模块5模块设置在pcb板4上,与pcb板4电性连接。pcb板4上具有凸出位置41,该突出位置具体为pcb板4向第二支撑柱62 类“c”字形的结构缺口延伸的位置上。所述的磁感应模块5设置在凸出位置41 上。在位置关系上,圆环形磁铁3中心穿过下转轴25,因此圆环形磁铁3是设置在下转轴25所在圆的圆周上,而磁感应模块5设置在凸出位置41上,凸出位置 41在第二支撑柱62的缺口上,因此磁感应模块5设置在圆环形磁铁3转动所扫过的pcb板4的位置上,因此磁感应模块5能够相对于其他位置更灵敏检测到圆环形磁铁3转动时磁通量的变化。
36.本实施例中,采用的磁感应模块5为iqs624霍尔旋转感应器,其能够感应磁通量变化,并转换成电信号。
37.本实施例组合和使用,如附图7和附图8所示,控制齿轮2的上转轴24卡入第一壳体1的转轴孔12上,限位凸台23此时正好卡入限位环11内,因此控制齿轮2的上侧固定稳定,控制齿轮2只能够进行转动。控制齿轮2下部的容纳位21内容纳有圆环形磁铁3,因为容纳位21内有卡定凸起22,使得圆环形磁铁 3与容纳位21内稳固连接,在控制齿轮2转动时,能够带动圆环形磁铁3转动。控制齿轮2的下转轴25卡入中空的第二支撑柱62内,第二支撑柱62的端部曲面与圆环形磁铁3接触,为圆环形磁铁3提供一个向上的支撑力,保证在正常使用时,圆环形磁铁3不会向下发生脱落。第一支撑柱61则与控制齿轮2的下侧接触,为控制齿轮2提供向上的支撑力。因此,通过第一壳体1和第二壳体6的配合,控制齿轮2固定在两者之间,控制齿轮2仅能进行转动。
38.在具体使用时,转动控制齿轮2,就能够带动圆环形磁铁3转动,圆环形磁铁3转动,使得固定在其下方的磁感应模块5所在的磁场发生变化,磁感应模块 5将变化量转化为电信号,传送到预期电性连接的pcb板4上进行处理,实现了磁感控制。
39.可以理解的,上述实施例中各个部件之间的不同实施方式可以进行组合实施,实施例仅仅只是为了说明特定结构的可实施方式,并不是作为方案实施的限定。
40.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1