具有减少占地面积的半导体处理工具平台配置的制作方法
1.本公开内容的实施方式涉及具有减少占地面积的半导体处理工具平台配置。
背景技术:
2.半导体装置的制造涉及对基板或“晶片”(诸如硅基板、玻璃板及类似者)执行一系列程序。这些步骤可包括抛光、沉积、蚀刻、光刻、热处理等。通常在包括多个处理腔室的单个处理系统或“工具”中执行许多不同的处理步骤。由于用以附接到处理腔室的每个传送腔室上的小平面数量有限,一些工具涉及多个传送腔室,处理腔室可用于在同一工具(如,包括类似的处理环境,诸如压力、温度、清洁空气水平、真空度等)内执行所有步骤。在处理工具内包括多个处理腔室可增加晶片处理产量。
3.仅作为示例,当前采用的用于膜层的外延沉积(生长)的工具包括由通孔连接的两个六小平面传送腔室,以促进基板在其间通过。第一个传送腔室经由负载锁定而连接到前界面(使用两个小平面),使用另外两个小平面附接到通孔,从而留下两个小平面用于附接到两个预清洁腔室。采用预清洁腔室来制备晶片的表面,以便在外延处理腔室内沉积外延生长层。因此,采用第一传送腔室用于预清洁腔室,而第二传送腔室的四个小平面附接到四个外延处理腔室,使用剩余的两个小平面连接到通孔。以这种方式,两个传送腔室被结合以便在同一工具内执行预清洁和外延生长沉积并维持四个处理腔室的能力。由于使用了传送腔室和通孔,这种处理工具的占地面积相当大,占用了宝贵且越来越昂贵的制造设施的平方英尺。
技术实现要素:
4.于此描述的一些实施方式涵盖包括基板处理系统的系统,基板处理系统包括具有受控环境的工厂接口和传送腔室。传送腔室包括四个第一小平面和三个第二小平面,其中三个第二小平面的每一个具有比四个第一小平面的每一个的宽度窄的宽度。第一处理腔室附接到四个第一小平面的一个。第一辅助腔室附接到三个第二小平面的第一个,其中第一辅助腔室小于第一处理腔室。负载锁定附接到三个第二小平面的第二个和工厂接口。机器人附接到传送腔室的底部,机器人适以将基板传送进出第一处理腔室、第一辅助腔室及负载锁定。
5.在相关实施方式中,于此描述的是用于半导体制造装置的主要框架,主要框架包括传送腔室。传送腔室包括
6.底部和附接到底部的四个第一小平面,其中第一小平面的每一个适于附接到处理腔室。两个第二小平面附接到底部,其中两个第二小平面的每一个具有比四个第一小平面的每一个的宽度窄的宽度并且适于附接到比处理腔室小的辅助腔室。单个第三小平面附接到底部,其中单个第三小平面适于连接到负载锁定。机器人附接到底部,机器人适以将基板传送进出处理腔室、辅助腔室和负载锁定。
7.在用于操作基板处理系统的方法的进一步实施方式中,基板处理系统包括上述系
统所述的部件以及工厂接口中的工厂接口机器人。方法包括以下步骤:由工厂接口机器人将基板从工厂接口传送到负载锁定。方法进一步包括以下步骤:由传送腔室机器人将基板从负载锁定传送到第一辅助腔室。方法进一步包括以下步骤:由传送腔室机器人将基板从第一辅助腔室传送到第一处理腔室。方法进一步包括以下步骤:由传送腔室机器人将基板从第一处理腔室传送到负载锁定。
8.根据本公开内容的这些和其他实施方式提供了许多其他特征。本公开内容的其他特征和实施方式将从以下详细描述、权利要求和附随的附图而变得更加清楚。
附图说明
9.在附随的附图的图中由示例而非限制的方式显示了本公开内容,其中相似的附图标记指示相似的元件。应注意在这份公开内容中对“一”或“一个”实施方式的不同引用并不一定是指同一实施方式,且此类引用表示至少一个。
10.图1a-图1b是根据各种实施方式的示例处理工具的俯视示意图。
11.图2是根据实施方式的另一处理工具的俯视示意图。
12.图3是根据实施方式的传送腔室的俯视平面图。
13.图4a-图4b分别是处理工具的俯视和侧视示意图,显示了根据各种实施方式的用于辅助腔室的支撑部件的位置的多个潜在区域。
14.图5a-图5c分别是根据实施方式的处理工具的俯视示意图和侧视透视图,其中用于辅助腔室的支撑部件定位在特定位置。
15.图6是根据各种实施方式的操作所公开的处理工具的方法的流程图。
具体实施方式
16.于此描述的实施方式涉及用于具有减少占地面积的半导体工具平台配置的系统和方法。例如,为了解决与包括两个传送腔室的处理工具的大尺寸占地面积有关的上述缺陷,本公开内容采用单个传送腔室以附接到两个辅助腔室(如,其可为预清洁腔室、后清洁腔室、脱气腔室、批量晶片储存器或它们的结合)以及连接到四个处理腔室和负载锁定。在一些实施方式中,传送腔室设计成具有七个小平面,其中四个较大并且适以附接到较大的处理腔室,并且其中三个较小并且被设计为附接到较小的辅助腔室和负载锁定。在一个实施方式中,四个较大的小平面依次位于传送腔室的后端,而三个较小的小平面依次位于处理腔室的前端。在一个实施方式中,负载锁定附接在三个较小小平面的中央一个。于此的术语“小平面”可被认为与传送腔室的“侧面”同义。
17.在这些和其他实施方式中,虽然负载锁定可为附接到大气工厂接口(fi)的批量负载锁定,但是负载锁定也可附接到包括受控环境或大气(如,在高于大气压下由惰性气体环境密封或由超低湿度和/或超低氧水平控制)的fi。在一个实施方式中,惰性气体循环通过受控环境,以实现超低湿度和超低氧环境。在另一个实施方式中,额外清洁的干燥空气通过受控环境循环,以实现超低湿度环境。在一些实施方式中,超低湿度和超低氧是指比环境条件中的氧和湿度水平的25%或更低(如,环境空气中的氧或湿度水平的1/4或更低)。在其他实施方式中,超低湿度和超低氧气是指比环境条件中的氧气和湿度水平的35%或更低。
18.使用具有受控环境的fi可允许使用单槽或双槽负载锁定。单槽负载锁定可允许单
个晶片同时在任一方向上通过,而双槽负载锁定可允许两个晶片同时在相反方向上通过,如,进入传送腔室中的未处理的晶片和离开传送腔室的已处理的晶片。在这些实施方式中,由于具有受控环境的fi,可避免批量负载锁定,从而允许已处理和未处理的晶片自由且有效地通过负载锁定,而不必进一步对fi加压并准备传送。因此,已处理和未处理的晶片可聚集在前开式晶片传送盒(foup)中,foup可附接并密封到fi。
19.在一些实施方式中,处理工具的平方英尺被减小,使得重新封装辅助腔室的一些支撑部件可能是可取的。这些支撑部件可包括(例如)分别向辅助腔室供应气体的气体面板、相关的气体管线、交流(ac)功率箱、相关的电缆以及电控制箱和相关的接口。将更详细地讨论定位这些支撑部件的实施方式。
20.本公开内容的实施方式的优点包括(但不限于)增加处理工具每平方英尺空间的生产率、将负载锁定简化为较低的轮廓(这也节省空间)并且通常增加处理晶片每小时每平方英尺(wpps)约50%或更多。这些和其他优点将在以下公开内容中提及和/或在半导体装置处理的领域中的技术人员来说将是显而易见的。
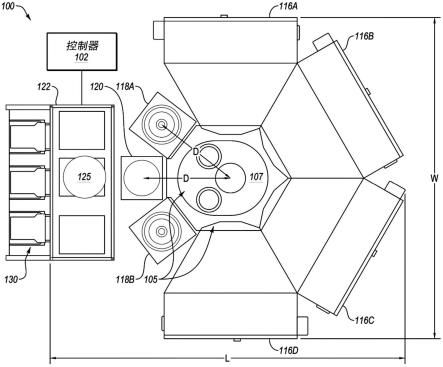
21.图1a-图1b是根据各种实施方式的示例处理工具100(如,半导体装置处理系统)的俯视示意图。在各种实施方式中,处理工具100包括具有多个小平面的单个传送腔室105,包括附接在传送腔室105的底部107和顶部(未显示)之间的至少七个小平面。
22.在一个实施方式中,传送腔室105(在图1b中最佳地显示)包括四个第一小平面106以及三个第二小平面108,其中四个第一小平面106的每一个都适于附接到处理腔室,其中三个第二小平面108的两个适于附接到辅助,并且三个第二小平面108的一个适于附接到负载锁定。在一个实施方式中,三个第二小平面108的中间者经调整尺寸且适于附接到负载锁定。在各种实施方式中,三个第二小平面108的每一个具有比四个第一小平面106的每一个的宽度窄的宽度。换言之,在这些实施方式中,每个第一小平面具有比每个第二小平面宽的宽度。在一些实施方式中,四个第一小平面106沿着传送腔室105的后端依序定位,并且三个第二小平面108沿着传送腔室的前端依序定位。
23.传送腔室105可进一步包括大约在底部107的中心附接至传送腔室105的底部107的传送腔室机器人110。传送腔室机器人110可包括一个或多个臂110a,其中终端受动器110b附接到每个臂110a。每个终端受动器可适于保持至少一个基板或晶片。传送腔室105可进一步包括第一基板支撑件109a和第二基板支撑件109b。在通过负载锁定传送出去之前,传送腔室机器人110可将处理过的晶片放置在第一基板支撑件109a和第二基板支撑件109b的任一个上,用于传送腔室105内的内部冷却。
24.在各种实施方式中,处理工具100进一步包括分别附接到四个第一小平面106的一个或多个处理腔室116a、116b、116c、116d(也称为处理腔室)。例如,第一处理腔室116a可附接到四个第一小平面106的第一小平面106a,第二处理腔室116b可附接到四个第一小平面106的第二小平面106b,第三处理腔室116c可附接到四个第一小平面106的第三小平面106c,且第四处理腔室116d可附接到四个第一小平面106的第四小平面106d。处理腔室116a、116b、116c、116d可包括蚀刻腔室、沉积腔室(包括原子层沉积、化学气相沉积、物理气相沉积或其等离子体增强版本)、退火腔室及类似者。在一个实施方式中,第一、第二、第三和第四处理腔室的每一个是外延处理腔室。
25.在一些实施方式中,处理工具100进一步包括附接到三个第二小平面108的第一小
平面108a的第一辅助腔室118a、附接到三个第二小平面108的第二小平面108b的负载锁定120及附接到三个第二小平面108的第三小平面108c的第二辅助腔室118b。在各种实施方式中,第一辅助腔室118a和第二辅助腔室118b的每一个是预清洁腔室、后清洁腔室、脱气腔室或批量晶片储存器。
26.在各种实施方式中,可采用预清洁腔室来制备晶片的表面,以在处理腔室的一个内进行处理。例如,在外延处理腔室中沉积外延生长层之前,可将晶片上的膜蚀刻成特定图案和表面,否则在预清洁腔室中清除颗粒。此外,后清洁可在处理腔室的一个中蚀刻之后从晶片移除蚀刻后残留物。此外,在处理腔室的一个中进行等离子体气相沉积(pvd)型处理之前,脱气腔室可用于清洁和干燥晶片的表面。此外,无论是已处理的还是未处理的晶片,都可在处理腔室中处理之前或之后,或在处理步骤之间暂时储存在批量晶片储存器中。以这种方式,第一辅助腔室118a和第二辅助腔室118b可结合这些处理以多种方式采用。此外,当在于此提及“辅助”腔室时,可推断提及是指任何预清洁腔室、后清洁腔室、脱气腔室、批量晶片储存器或其结合。
27.在各种实施方式中,处理工具100进一步包括附接在前开式晶片传送盒(foup)130和负载锁定120之间的工厂接口(fi)122。虽然负载锁定120可附接到三个第二小平面108的任一个,在一个实施方式中,但是负载锁定120附接到三个第二小平面108的第二小平面108b,例如,在第一辅助腔室118a和第二辅助腔室118b之间。这可通过使大于负载锁定120的两个辅助腔室成角度远离fi 122而使处理系统100尽可能紧凑。在各种实施方式中,fi 122进一步包括工厂接口(fi)机器人125,适以将基板(晶片)传送进出foup 130和负载锁定120。传送到负载锁定120的晶片可为未处理的晶片,而传送回foup 130的晶片可为已处理的晶片。在一个实施方式中,负载锁定120是能够保持许多晶片的批量负载锁定。
28.在实施方式中,传送腔室机器人110适于将基板传进出处理腔室116a
……
116d、辅助腔室118a和118b的一个以及负载锁定120。例如,传送腔室机器人110可包括臂110a和终端受动器110b,其结合长度足以将基板到达任何附接的处理腔室的中心,到达包括第一处理腔室116a,还到达第一辅助腔室118a以及到达负载锁定120。
29.在一个实施方式中,fi 122是具有受控环境(如,惰性气体环境或超低湿度和/或超低氧的结合的环境)的fi。在一个实施方式中,惰性气体循环通过受控环境,以实现超低湿度和超低氧环境。在另一个实施方式中,额外清洁的干燥空气在受控环境中循环,以实现超低湿度环境。fi 122的使用可允许为负载锁定120使用单槽或双槽负载锁定。单槽负载锁定可允许单个晶片同时在任一方向上通过,而双槽负载锁定可允许两个晶片同时在相反方向上通过,如,进入传送腔室105的未处理的晶片和离开传送腔室105的已处理的晶片。在这些实施方式中,由于具有受控环境的fi 122,可避免使用更大轮廓的批量负载锁定,从而允许已处理和未处理的晶片自由且有效地通过负载锁定120,而不必对fi 122加压并准备传送。因此,已处理和未处理的晶片可聚集在foup 130中,foup 130可附接并密封到fi 122。
30.在一些实施方式中,为了说明处理系统100的小占地面积、紧凑本质,在机器人110的中心与辅助腔室118a或118b的一个的中心之间的距离(d)在35英寸的20%以内。在机器人110的中心和负载锁定120的中心之间的距离也可在35英寸的20%以内。此外,处理工具100的宽度(w)(可为在两个相对处理腔室(如,116a和116d)之间的外部距离)可在140英寸的20%以内。此外,处理工具100的长度(可在fi 122的前表面和相邻处理腔室(如,116b和
116c)的后端之间)可在150英寸的20%以内。
31.控制器102控制处理工具100的各个方面。控制器102可为和/或包括诸如个人计算机、服务器计算机、可编程逻辑控制器(plc)、微控制器等的计算装置。控制器102可包括一个或多个处理装置,处理装置可为通用处理装置(诸如微处理器、中央处理单元或类似者)。更具体地,处理装置可为复杂指令集计算(cisc)微处理器、精简指令集计算(risc)微处理器、超长指令字(vliw)微处理器、或实现其他指令集的处理器或实现指令集的结合的处理器。处理装置还可为一个或多个专用处理装置,诸如专用集成电路(asic)、现场可编程门阵列(fpga)、数字信号处理器(dsp)、网络处理器或类似者。控制器102可包括数据储存装置(如,一个或多个磁盘驱动器和/或固态驱动器)、主存储器、静态存储器、网络接口和/或其他部件。控制器102可执行指令以执行于此描述的方法和/或实施方式的任何一种或多种。指令可存储在计算机可读存储介质上,计算机可读存储介质可包括主存储器、静态存储器、辅助存储器和/或处理装置(在指令执行期间)。
32.控制器102可从fi机器人125、传送腔室机器人110、一个或多个处理腔室116a
……
116d以及第一辅助腔室118a和第二辅助腔室118b接收信号并向其发送信号。控制器102可因此引起对处理工具100内的这些部件的控制,如将参考图6更详细地讨论的。
33.图2是根据实施方式的另一处理工具200的俯视示意图。处理工具200可类似于图1a-图1b的处理工具100,且因此并非所有部件都被标记。例如,处理工具200可包括附接到多个处理腔室216a、216b、216c和216d并且附接到第一辅助腔室218a、第二辅助腔室218b和负载锁定220的传送腔室205。第一辅助腔室218a和第二辅助腔室218b的每一个可包括分别位于第一辅助腔室218a和第二辅助腔室218b处和下方的一组支撑部件219a和219b。每组支撑部件219a和219b可包括(例如)气体管线、ac功率箱、电控制箱、功率和电缆及类似者。
34.在一个实施方式中,处理工具200进一步包括附接在负载锁定220和fi 222(如,具有受控环境的fi 222)之间的延伸件221。延伸件221可帮助将附接点稍微延伸到fi 222,以便为用于第一辅助腔室218a和第二辅助腔室218b的每一个的该组支撑部件219a和219b腾出空间。在这个实施方式中,fi机器人(未显示)可具有足以从负载锁定220的中心放置和取回基板的延伸机器人臂和/或机器人臂的终端受动器。fi 222可进一步附接到foup 230。此外,如图所示,负载锁定220可偏离fi 222的中心附接,其中附接的确切位置并不重要。以这种方式,fi 222可被定位成避开支撑部件219a和219b并有助于处理工具200的占地面积尽可能紧密。
35.图3是根据实施方式的传送腔室305的俯视平面图。在一些实施方式中,传送腔室105和205可用图3的传送腔室305代替。在一个实施方式中,传送腔室305例如由整体金属件制成。传送腔室305可包括四个第一小平面306,如,第一小平面306a、第二小平面306b、第三小平面306c和第四小平面306d。这四个第一小平面306的每一个都适于附接到处理腔室。
36.在一些实施方式中,传送腔室305进一步包括传送接口单元318,适以包括三个小平面部分,如,第一小平面部分308a、第二小平面部分308b和第三小平面部分308c。小平面部分的每一个都适于附接到辅助腔室或负载锁定。例如,第一小平面部分308a可包括位于第一孔口319a的任一侧上的第一对圆柱形锁定311a,第二小平面部分308b可包括位于第二孔口319b的任一侧上的第二对圆柱形锁定311b,以及定位在第三孔口319c的任一侧上的第三对圆柱形锁定311c。在一个实施方式中,传送接口单元318是金属或其他材料的实心整体
件。在另一个实施方式中,传送接口单元是焊接或以其他方式附接在一起的一组三个金属条。
37.传送腔室305可进一步包括机器人孔口310a,通过机器人孔口310a来附接传送腔室机器人(诸如图1b的传送腔室机器人110)。传送腔室305可进一步包括第一基板支撑件309a和第二基板支撑件309b,在从处理腔室撤出之后的热处理晶片均放置在第一基板支撑件309a和第二基板支撑件309b上。在外延处理腔室中,温度可达到800℃以上。因此,第一基板支撑件309a和第二基板支撑件309b可用以在将已处理的晶片传送到负载锁定之前暂时搁置(如,最多20-30分钟)已处理的晶片。
38.图4a-图4b分别是处理工具400的顶视图和侧视图,其显示了用于根据各种实施方式的辅助腔室的支撑部件的位置的多个潜在区域,如,在第一区域101a、第二区域101b、第三区域101c或第四区域101d内。在一些实施方式中,处理工具400是与图1a-图1b和图2相同或相似的处理工具。
39.例如,在各种实施方式中,处理工具400可包括传送腔室405,传送腔室405附接到多个处理腔室416a、416b、416c和416d、附接到第一辅助腔室418a、附接到负载锁定(未显示)以及附接到第二辅助腔室418b。传送腔室405可进一步包括附接到七个小平面的顶部414,如,其可附接到底部(诸如图1a-图1b中所示的底部107)。处理工具400可进一步包括附接到负载锁定(未显示)的fi 422,负载锁定进一步附接到传送腔室405。在一些实施方式中,fi 422是具有受控环境的fi,如前所述,并且附接到foup 430。
40.位于一个可能区域中的支撑部件可包括(例如)分别向第一辅助腔室418a和第二辅助腔室418b供应气体的气体面板、相关的气体管线、交流(ac)功率箱、相关电缆以及电控制箱和相关接口。将更详细地讨论定位这些支撑部件的实施方式。气体面板450以示例的方式显示为位于第二辅助腔室418b下方,但可位于第一区域101a、第二区域101b、第三区域101c或第四区域101d的任一个中。气体面板450也可位于相应的辅助腔室附近或上方,诸如第一辅助腔室418a的上方或附近。气体面板450可适以供应选择的一种或多种气体(如,可为气体的混合物)并将(多种)处理气体供给到第一和第二辅助腔室418a和418b。
41.在一些实施方式中,第一区域101a位于fi 422的第一侧附近并且位于fi422和第一处理腔室416a之间的相关空间中。第二区域101b可进一步位于fi422的第二侧附近并且位于fi 422和第四处理腔室416d之间的相关空间中。第三区域101c可位于气体面板450所在的第一辅助腔室418a下方和第二辅助腔室418b下方。除了定位支撑部件之外,第三区域101c还可适以包括维修访问区域,用于提供对传送腔室405的访问以对传送腔室405进行维修。维修访问区域,更具体地,可位于第一辅助腔室418a和第二辅助腔室418b的至少一个和底板之间。在一些实施方式中,具有第三区域101c的维修访问区域在第一辅助腔室418a和第二辅助腔室418b之间通过并且通过通常位于负载锁定下方的用于传送腔室405的配电盘箱。第四区域101d可为附接到fi 422的上背面的区域,如,其至少部分地悬垂在负载锁定以及第一辅助腔室418a和第二辅助腔室418b的一个或两个上。
42.图5a-图5c分别是根据实施方式的处理工具500的俯视示意图和侧视透视图,其中用于辅助腔室的支撑部件定位在特定位置。例如,在各种实施方式中,处理工具500可包括附接到多个处理腔室516a、516b、516c和516d、附接到第一辅助腔室518a、附接到负载锁定520和附接到第二辅助腔室518b的传送腔室505。传送腔室505可进一步包括附接到七个小
平面的顶部514,如,其可附接到底部(诸如图1a-图1b中所示的底部107)。处理工具500可进一步包括附接到负载锁定520的fi 522,负载锁定520进一步附接到传送腔室505。在一些实施方式中,fi是具有受控环境的fi,如前所述,并且附接到foup 530。
43.在一些实施方式中,用于第一辅助腔室518a和第二辅助腔室518b的气体面板(诸如第一气体面板550a)位于第一辅助腔室118a和第二辅助腔室118b的一者与处理工具500的底板之间。处理工具500可进一步包括在气体面板550a与第一辅助腔室518a和第二辅助腔室518b的每一个之间延伸的气体管线(诸如一个或多个第一气体管线521a)。在一个实施方式中,第一气体面板550a位于第一辅助腔室518a和底板之间,并且一个或多个第一气体管线521a连接在第一气体面板550a和第一辅助腔室518a之间,以将处理气体从第一气体面板550a供给到第一辅助腔室518a。在进一步的实施方式中,第二气体面板550b位于第二辅助腔室518b和底板之间,并且一个或多个第二气体管线521b连接在第二气体面板550b和第二辅助腔室518b之间,以将处理气体从第二气体面板550b供给到第二辅助腔室518b。
44.此外,在一个实施方式中,第一辅助腔室518a附接到邻近负载锁定520的第一侧的传送腔室505。处理工具500可进一步包括交流(ac)功率箱560a以提供功率给第一辅助腔室518a。ac功率箱560a可附接到工厂接口(如,fi 522)的上背面的第一侧。附接到ac功率箱560a的ac电缆沿着fi 522的外侧延伸并越过第一辅助腔室518a。处理工具500可进一步包括电控制箱562a,以控制第一辅助腔室518a的功能。电控制箱562a可附接到工厂接口的上背面的第一侧并且与ac功率箱560a相邻,如,在一个实施方式中在ac功率箱560a下方。在一个实施方式中,ac功率箱560a至少部分地悬挂在第一辅助腔室518a上方。
45.在替代实施方式中,ac功率箱560a可选地位于第一处理腔室516a附近,如,在第一处理腔室516a旁边的底板上。电控制箱562a可接着附接到ac功率箱560a,如,在电控制箱562a的顶部、下方或旁边。此外,一个或多个第一ac电缆564a可附接到ac功率箱560a并且在ac功率箱560a和第一辅助腔室518a之间运行。在一些实施方式中,一个或多个第一ac电缆564a也包括用于电控制箱562a的(多个)电缆。
46.此外,在一个实施方式中,第二辅助腔室518a附接到传送腔室505,邻近负载锁定520的第二侧。处理工具500可进一步包括交流(ac)功率箱560b,以提供功率给第二辅助腔室518b。ac功率箱560b可附接到工厂接口(如,fi 522)的上背面的第二侧。附接到ac功率箱560b的ac电缆沿着fi 522的外侧延伸并越过第二辅助腔室518b。处理工具500可进一步包括电控制箱562b,以控制第二辅助腔室518b的功能。电控制箱562b可附接到fi 522的上背面的第二侧并且与ac功率箱560b相邻,如,在一个实施方式中在ac功率箱560b下方。在一个实施方式中,ac功率箱560b至少部分地悬挂在第二辅助腔室518b上方。
47.在替代实施方式中,ac功率箱560b可选地位于第四处理腔室516d附近,如,在第四处理腔室516d旁边的底板上。电控制箱562b可接着附接到ac功率箱560b,如,在电控制箱562b的顶部、下方或旁边。此外,一个或多个第二ac电缆564b可附接到ac功率箱560b并且在ac功率箱560b和第二辅助腔室518b之间运行。在一些实施方式中,一个或多个第二ac电缆564a也包括用于电控制箱562b的(多个)电缆。
48.图6是根据各种实施方式的操作所公开的处理工具的方法600的流程图。方法600可由处理逻辑执行,处理逻辑可包括硬件(如,处理装置、电路、专用逻辑、可编程逻辑、微代码、装置的硬件、集成电路等)、软件(如,在处理装置上运行或执行的指令)或其结合。在一
些实施方式中,方法600由控制器102(图1)或具有处理装置的其他计算系统并参考于此所述的任何处理工具来执行。尽管以特定的顺序或次序显示,除非另有说明,否则可修改处理的次序。因此,所示的实施方式应被理解为示例,并且所示的处理可以不同的次序执行,并且一些处理可并行执行。此外,在各种实施方式中可省略一个或多个处理。因此,并非在每个实施方式中都需要所有处理。其他处理流程也是可能的。
49.在操作610处,处理逻辑使工厂接口机器人将基板从工厂接口传送到负载锁定。
50.在操作620处,处理逻辑使传送腔室机器人将基板从负载锁定传送到第一辅助腔室。
51.在操作630处,处理逻辑使传送腔室机器人将基板从第一辅助腔室传送到第一处理腔室。
52.在操作640处,处理逻辑使传送腔室机器人将基板从第一处理腔室传送到负载锁定。
53.在图6的实施方式的延伸中,处理逻辑可进一步使传送腔室机器人将基板传送到传送腔室的基板支撑件,用于在将基板传送到负载锁定之前进行冷却。处理逻辑可进一步使工厂接口机器人将基板从负载锁定传送到附接到工厂接口的前开式晶片传送盒。
54.在图6的实施方式的延伸中,处理逻辑可进一步使基板由第一辅助腔室处理以移除预先沉积在基板上的膜的图案并清洁基板的表面。处理逻辑可进一步使基板由第一处理腔室处理以执行沉积在基板上的晶体膜的外延生长。
55.为了提供对本公开内容的若干实施方式的良好理解,前面的描述阐述了许多具体细节,诸如具体系统、部件、方法等的示例。然而,对于本领域技术人员来说显而易见的是,可在没有这些具体细节的情况下实践本公开内容的至少一些实施方式。在其他情况下,众所周知的部件或方法没有详细描述或以简单的方块图格式呈现,以避免不必要地混淆本公开内容。因此,所阐述的具体细节仅是示例性的。特定实现可与这些示例性细节不同,并且仍然被认为在本公开内容的范围内。
56.在整个这份说明书中对“一个实施方式”或“一实施方式”的引用意味着结合该实施方式描述的特定特征、结构或特性被包括在至少一个实施方式中。因此,在这份说明书各处出现的短语“在一个实施方式中”或“在一实施方式中”不一定都指代相同的实施方式。此外,术语“或”旨在表示包含的“或”而不是排他的“或”。当于此使用术语“约”或“大约”时,这旨在表示所呈现的标称值精确在
±
10%以内。
57.尽管以特定次序显示和描述了于此的方法的操作,但是可改变每种方法的操作次序,从而可以相反的次序执行某些操作,使得某些操作可至少部分地与其他操作同时执行。在另一个实施方式中,不同操作的指令或子操作可为呈间歇和/或交替的方式。
58.应当理解,以上描述旨在是说明性的,而不是限制性的。在阅读和理解以上描述后,许多其他实施方式对于本领域技术人员来说将是显而易见的。因此,本公开内容的范围应当参考附随的权利要求以及这些权利要求所赋予的等同物的全部范围来决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1