一种开关的传动系统的制作方法
1.本发明涉及高压开关领域,具体为一种开关的传动系统。
背景技术:
2.大容量开关设备分别设置电弧触头系统和额定电流触头系统。电弧触头系统有特殊的满足电弧烧蚀并熄灭电弧的材质和结构。额定电流动触头系统有特殊的满足适合长期通流的材质和结构。
3.目前大多数开关设备,动额定电流触头和动弧触头,没有相对运动,通过加长动弧触头或者动额定电流触头来满足,在合闸过程中电弧动触头和电弧静触头先导通,额定电流动触头和额定电流静触头后导通这两种。分闸过程中,电弧动触头和电弧静触头先分开,额定电流动触头和额定电流静触头后分开。
4.现有技术的缺点是动额定电流触头和动弧触头是一起运动,动额定电流触头和动弧触头,行程一样,速度一样。对于大容量开关设备,动额定电流触头质量比动弧触头大很多,且动额定电流触头需要的运动速度远远小于动弧触头。
技术实现要素:
5.针对现有技术中存在的问题,本发明提供一种开关的传动系统,解决动额定电流触头和动弧触头运动质量和速度的优化,设计机械传动结构,将电弧动触头和额定电流动触头及其他辅助系统分别按照设定的不同运动行程和速度运动,以满足要求。
6.本发明是通过以下技术方案来实现:
7.一种开关的传动系统,包括第一传动单元、第二传动单元、第三传动单元、第一滑道约束和第二滑道约束,所述第一传动单元包括第一定轴和第一连杆,所述第一定轴固定设置于支架上,所述第一定轴为动力输入轴,所述第一连杆与第一定轴固定连接;所述第二传动单元包括第二定轴、第三连杆、第四连杆和第五连杆,所述第二定轴固定设置于支架上,所述第四连杆与第五连杆的长度不相同,所述第三连杆、第四连杆和第五连杆均与第二定轴固定连接,所述第一连杆驱动第三连杆绕第二定轴中心转动,所述第五连杆远离第二定轴的一端与动额定电流触头连接,所述动额定电流触头滑动设置于第一滑道约束中,所述第五连杆驱动动额定电流触头在第一滑道约束的作用下沿第一滑道约束运动;所述第三传动单元包括第三定轴和第八连杆,所述第三定轴固定设置于支架上,所述第八连杆与第三定轴转动连接,所述第四连杆与第八连杆转动连接,所述第八连杆远离第三定轴的一端与动弧触头连接,所述动弧触头滑动设置于第二滑道约束中,所述第八连杆驱动动弧触头在第二滑道约束的作用下沿第二滑道约束运动。
8.优选的,所述第一连杆与第三连杆之间设有转动连接的第二连杆。
9.优选的,所述第五连杆与动额定电流触头之间设有转动连接的第六连杆。
10.优选的,所述第四连杆与第八连杆之间设有转动连接的第七连杆。
11.优选的,所述第七连杆与第八连杆的连接点处位于第八连杆的中部。
12.优选的,所述第八连杆的转动角度小于等于90
°
。
13.优选的,所述第八连杆远离第三定轴的一端与动弧触头连接。
14.优选的,所述第八连杆远离第三定轴的一端与动弧触头之间设有转动连接的第九连杆。
15.优选的,所述第一滑道约束和第二滑道约束均为水平约束。
16.与现有技术相比,本发明具有以下有益效果:
17.本发明一种开关的传动系统通过从第一定轴输入的动力,再经由第一连杆传递至第三连杆,又因第三连杆、第四连杆、第五连杆通过第二定轴形成共同的运动单元,第三连杆可同步驱动第四连杆和第五连杆绕第二定轴转动,因此第五连杆驱动动额定电流触头在第一滑道约束的作用下沿滑道运动;同时第四连杆驱动第八连杆绕第三定轴转动,第八连杆驱动动弧触头在第二滑道约束的作用下沿滑道运动,实现了动额定电流触头和动弧触头的运动。
18.又因第四连杆和第五连杆的长度不相同,所以与第四连杆相连的动弧触头与第五连杆相连的动额定电流触头的水平线速度不同,通过改变各个连杆的长度和相互之间的角度,可以调整动额定电流触头和动弧触头的行程和速度,得以适配不同的断路器。
19.进一步的,第七连杆实现了第四连杆与第八连杆的连接,并且第七连杆与第四连杆配合下可以限制第八连杆的转动角度,使得第八连杆只能绕第三定轴进行一定角度的转动。
附图说明
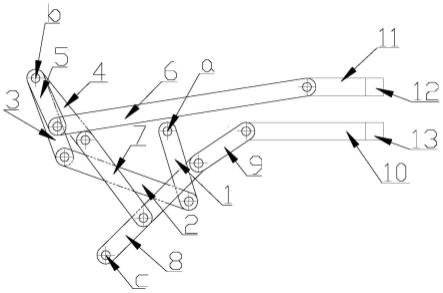
20.图1为本发明的一种开关的传动系统的第一运动位置示意图;
21.图2为本发明的一种开关的传动系统的第二运动位置示意图。
22.图中,1、第一连杆;2、第二连杆;3、第三连杆;4、第四连杆;5、第五连杆;6、第六连杆;7、第七连杆;8、第八连杆;9、第九连杆;10、动弧触头;11、动额定电流触头;12、固定额定电流触头;13、固定弧触头;a、第一定轴;b、第二定轴;c、第三定轴。
具体实施方式
23.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
24.本发明公开了一种开关的传动系统,参照图1、2,包括第一传动单元、第二传动单元、第三传动单元、第一滑道约束和第二滑道约束,该传动系统驱动动弧触头10靠近或远离固定弧触头13,同时驱动动额定电流触头11靠近或者远离固定额定电流触头12。
25.第一传动单元包括第一定轴a和第一连杆1,第一定轴a固定设置于支架上,所述第一定轴a为动力输入轴,第一连杆1与第一定轴a固定连接。
26.第二传动单元包括第二定轴b、第三连杆3、第四连杆4和第五连杆5,第二定轴b固定设置于支架上,第三连杆3、第四连杆4和第五连杆5均与第二定轴b固定连接,第一连杆1与第三连杆3之间设有转动连接的第二连杆2,第五连杆5与动额定电流触头11之间设有转动连接的第六连杆6,第五连杆5驱动第六连杆6转动,第六连杆6驱动动额定电流触头11在第一滑道约束的作用下沿第一滑道约束运动。
27.第三传动单元包括第三定轴c和第八连杆8,第三定轴c固定设置于支架上,第八连杆8与第三定轴c转动连接,第四连杆4与第八连杆8之间设有转动连接的第七连杆7,第七连杆7与第八连杆8的连接点处不位于第八连杆8的端部,第八连杆8远离第三定轴c的一端与动弧触头10连接,第八连杆8远离第三定轴c的一端与动弧触头10之间设有第九连杆9。工作时,第四连杆4驱动第八连杆8绕第三定轴c转动,第八连杆8驱动第九连杆9转动,第九连杆9驱动动弧触头10在第二滑道约束的作用下沿第二滑道约束运动。
28.第四连杆4与第五连杆5的长度不相同,所以与其分别连接的第七连杆7和第六连杆6的水平方向线速度不同,因此可以实现动额定电流触头11和动弧触头10的同步异速运动。
29.本实施例中第四连杆4的长度大于第五连杆5的长度,第七连杆7与第八连杆8的连接点处位于第八连杆8的中部,同时第一滑道约束和第二滑道约束均为水平约束,在传动系统由第一运动位置转变为第二运动的过程中,其动力原理如下:
30.第一定轴a和第一连杆1组成的第一传动单元,第二定轴b、第三连杆3、第四连杆4和第五连杆5组成的第二传动单元,第一传动单元、第二连杆2和第二传动单元在空间平面上共同组成一个四连杆运动机构。
31.第一定轴a在外力的驱动下,绕其自身的轴中心转动一定的角度,从而带动第二定轴b、第三连杆3、第四连杆4和第五连杆5组成的第二传动单元,绕第二定轴b的轴中心转动一定的角度。又因第四连杆4的长度大于第五连杆5的长度,所以其上分别连接的第七连杆7和第六连杆6的水平方向线速度不相同。
32.第五连杆5、第六连杆6、动额定电流触头11和第一滑道约束共同组成曲柄滑块机构,驱动动额定电流触头11运动。
33.动弧触头10的运动系统是一个复杂的多级传动,动力经第一传动单元传递至第四连杆4,第四连杆4的摆动驱动第七连杆7运动,因第七连杆7连接在第八连杆8的中间部位,第八连杆8的一端和第三定轴c转动连接,但只能绕第三定轴c中心转动一定角度,第八连杆8远离第三定轴c的一端连接第九连杆9,第九连杆9带动动弧触头10沿第二滑动约束中进行水平方向运动。
34.动额定电流触头11和动弧触头10从第一位置(如图1所示)运动到第二位位置(如图2所示)时,动额定电流触头11和固定额定电流触头12分离的时刻早于运动动弧触头10和固定弧触头13分离的时刻。
35.动额定电流触头11和运动动弧触头10从第二位置运动到第一位置时,动弧触头10和固定弧触头13接触的时刻早于动额定电流触头11和固定额定电流触头12接触的时刻。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1