一种基于外转子永磁同步电机的贯穿式直线驱动装置的制作方法
[0001]
本发明专利涉及一种基于外转子永磁同步电机的贯穿式直线驱动装置,属于机器人关节直线驱动设备技术领域。
背景技术:
[0002]
随着机器人技术的不断发展,机器人参与的工程领域范围越来越大,为完成日益提高的技术要求,各种各样的驱动装置得到了广泛的应用与发展,而机器人需要完成的任务复杂度越来越高,更好的机器人驱动装置亟待产生。更大的输出功率、更小的质量和体积,即更大功率密度的驱动装置受到了机器人领域的青睐,与此同时,直流无刷永磁同步电机,由于其具有功率密度大、转速高、响应迅速的特点,开始逐步运用于机器人驱动技术领域。除此之外,不同于传统旋转驱动单元,直线驱动单元具有大驱动力、效率高、作用方式直接简单的特点,也逐步广泛运用于机器人技术领域,而滚珠丝杠作为常用机械回转直线运动转换传动单元,在驱动执行机构中也占有一席之地。
[0003]
现虽有部分专利(如cn206313598u)采用空心轴外转子电机,将滚珠丝杠穿过电机空心轴,提高了集成度,也提高了功率密度。但是由于其受限于磁编码器传感器安装缺陷,导致其滚珠丝杠运动行程大大受制于电机轴向尺寸,且由于磁编码器检测安装要求,导致其零件数目众多,结构复杂,制作成本高,使其在日渐发展的机器人驱动领域难以得到广泛使用。
[0004]
发明专利内容针对现有技术的缺陷,本发明专利的目的在于提供一种基于外转子永磁同步电机的贯穿式直线驱动装置,其结构简单,零件数目少,而滚珠丝杠具有大工作行程,可广泛运用于机器人驱动技术领域。
[0005]
为实现上述目的,本发明专利的技术方案为:一种基于外转子永磁同步电机的贯穿式直线驱动装置,包括提供动力的动力源、和动力源转动部分固定连接的动力转换模块以及位置检测装置霍尔传感器,所述动力源为外转子永磁同步电机,其包括定子基座以及铁芯绕组组成的的定子模块、由磁钢、弧形磁铁和转子基座组成的转子模块,所述动力转换部分包括与转子模块固定连接的滚珠丝杠螺母、与滚珠丝杠螺母螺旋配合的滚珠丝杠,滚珠丝杠上有与其通过螺纹配合的丝杠轴向运动限位件与丝杠头,所述转动部分为贯穿式空心轴结构并与滚珠丝杠螺母配合。本发明专利采用霍尔传感器作为位置反馈,与常见磁编码器位置传感器相比,具有安装结构简单、集成度高的特点,可使滚珠丝杠的工作行程不受限于电机轴向尺寸,大大扩大了应用范围。
[0006]
进一步地,所述动力源的定子模块包括定子铁芯及绕组以及贯穿定子铁芯及绕组的定子基座以及与定子基座连接的滚珠丝杠套筒,套筒在提供转动铰链安装空间的同时,对滚珠丝杠运动行程产生限位作用,防止滚珠丝杠从滚珠丝杠螺母中脱出,大大提高了使用过程中的安全性,在实际运用中可根据工作行程进行相应结构尺寸的调整。
[0007]
进一步地,所述转子模块包括内壁分布有磁铁的磁钢、与磁钢固定连接的转子基
座、用于同滚珠丝杠螺母同轴线固定连接的转子空心轴,所述转子基座与转子空心轴同轴线固定连接。所述转子空心轴通过轴承一与轴承二与定子基座共轴线安装在一起构成旋转副。在保证回转精度的同时,转子空心轴中间穿过滚珠丝杠,滚珠丝杠的运动范围可贯穿整个外转子永磁同步电机。
[0008]
进一步地,所述转子空心轴与轴承轴向限位螺母通过螺纹副共轴线安装。轴承轴向限位螺母与轴承二相接触,对其轴承内圈施加轴向预警力,且由于使用螺纹副,该预警力可调节,大大提高转子模块以及动力转换模块做回转运动的运动平稳性。
[0009]
进一步地,所述滚珠丝杠与丝杠头通过螺纹副共轴线连接,丝杠头可连接输出铰链结构。
[0010]
进一步地,所述滚珠丝杠与丝杠轴向运动限位件通过螺纹副共轴线安装,轴向运动限位件作用与上述滚珠丝杠套筒作用相似,限制向前运动的运动范围,防止滚珠丝杠从滚珠丝杠螺母中脱出,大大提高使用过程的安全性。
[0011]
进一步地,所述定子基座与滚珠丝杠套筒通过螺纹副共轴线安装。
[0012]
进一步地,所述定子基座与霍尔芯片按一定电角度安装的霍尔传感器固定连接。霍尔传感器上置有两个霍尔传感器芯片,根据永磁同步电机极对数按一定的电角度安装,对永磁同步电机的运动实现位置闭环,实时监测其所在位置,响应快,精度高,对实现机器人高精度运动控制有很大的优势。
[0013]
与现有技术相比,本发明专利具有以下有益效果:本发明专利使用的驱动源为外转子永磁同步电机,位置检测为霍尔传感器,相比于磁编码器位置检测传感器,安装简单,对执行运动机构的运到行程没有限制,可完全贯穿电机轴向尺寸,工作行程大。
[0014]
本发明专利结构简单,技术方案切实可行,制作成本底,可在工业机器人,竞赛机器人等各大机器人驱动领域得到广泛使用。
附图说明
[0015]
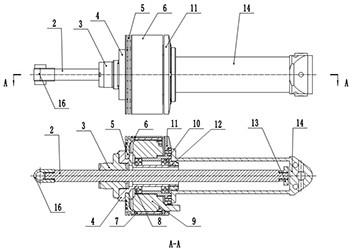
图1为本发明专利整体示意图;图2为本发明专利剖视图;图3为本发明专利爆炸视图;图4为本发明专利一种应用实施例。
[0016]
附图标记说明:1-贯穿式直线驱动装置,2-滚珠丝杠,3-滚珠丝杠螺母,4-转子空心轴,5-转子基座,6-磁钢,7-磁铁,8-轴承一,9-铁芯,10-轴承二,11-定子基座,12-轴承轴向限位螺母,13-丝杠轴向运动限位件,14-滚珠丝杠套筒,15-霍尔传感器,16-丝杠头,17-绕组,18-动力转换模块,19-外转子永磁同步电机,20-关节支撑,21-输出关节。
具体实施方式
[0017]
为了使本发明专利的目的、技术方案及优点更加清楚明白,以下结合附图及实例,对本发明专利进行进一步详细说明。
[0018]
本发明专利涵盖任何由权利要求定义的在本发明专利的精髓和范围上做的替代、
修改、等效方法以及方案。
[0019]
一种基于外转子永磁同步电机的贯穿式直线驱动装置,包括提供动力的动力源、和动力源转动部分固定连接的动力转换模块以及位置检测装置霍尔传感器,所述动力源为外转子永磁同步电机,其包括定子基座以及铁芯绕组组成的的定子模块,由磁钢、磁铁和转子基座组成的转子模块,所述动力转换部分包括与转子模块固定连接的滚珠丝杠螺母、与滚珠丝杠螺母螺旋配合的滚珠丝杠,滚珠丝杠上有与其通过螺纹配合的丝杠轴向运动限位件与丝杠头,所述转动部分为贯穿式空心轴结构并与滚珠丝杠螺母配合。本发明专利采用霍尔传感器作为位置反馈,霍尔传感器与定子基座固定连接,占据确定的位置。
[0020]
所述驱动源为外转子永磁同步电机19,铁芯9及线圈绕组17与定子基座11粘接,并在定子基座11上存在一条沟槽,防止铁芯9与定子基座11产生旋转错动,霍尔传感器15固定于定子基座11,霍尔传感器15上有按一定角度安装的霍尔芯片,安装位置使两芯片检测磁场信号相位相位差为90
°
,在定子基座11上有凹槽,使霍尔传感器15占据正确的位置,安装精度由加工零件精度保证,有较高检测精度。
[0021]
与磁编码器式位置传感器相比。此发明专利采用霍尔位置传感器,在轴向上没有磁编码器复杂的安装结构,并对滚珠丝杠运动行程不产生结构上的限制,可适用于不同行程需要的运用场景,结构简单,零件数目少,易于制造加工。
[0022]
如图2所示,在定子基座11末端安装有滚珠丝杠套筒14,套筒长度取决于滚珠丝杠2所需要的运动行程,长度可调整,对滚珠丝杠2轴向运动起限位作用,可防止滚珠丝杠2从滚珠丝杠螺母3中脱出,限位装置使此发明专利具有较好的安全性。
[0023]
所述转子模块,如图2剖视图,转子基座5与磁钢6粘接固定,转子基座5上有开有定位槽,保证磁钢6与转子基座5同轴安装,保证整个转子模块回装精度以及运转平稳性,弧形磁铁7在磁钢6内壁上均匀分布,同时与转子基座粘接配合,如图3,在转子基座5上分布均匀凹槽。凹槽保证磁铁7位置精度,使其均匀分布。
[0024]
所述运动转换模块18,如图3,转子空心轴4与转子基座5在径向上配合,在保证同轴度的同时固定连接,定子基座11内壁装配有轴承一8、轴承二10,转子空心轴4贯穿两轴承,并与轴承配合,如图2,定子基座11侧有轴承轴向限位螺母12,轴承轴向限位螺母12与转子空心轴4螺纹旋合,采用螺纹连接,在保证轴承轴向预警力的同时,可调节松紧度,保证顺畅的回转运动。
[0025]
所述运动转换模块18,如图3,滚珠丝杠螺母3与转子空心轴4固定连接,滚珠丝杠螺母3与滚珠丝杠2螺旋配合,完成永磁同步电机回转运动对直线运动的转换。
[0026]
如图4所示,本发明专利一种应用实例:本发明专利结合实际的机器人本体的连杆与关节构成一个完整的机器人关节驱动单元。贯穿式直线驱动装置1通过滚珠丝杠套筒14与关节支撑20相互铰接,构成旋转副,同样,贯穿式直线驱动装置1通过丝杠头16与输出关节21相互铰接,构成旋转副,使用时,动力源永磁同步电机19通过旋转将动力传递给运动转换模块18,完成回转运动对直线运动的转换,当永磁同步电机往一个方向旋转时,贯穿式直线驱动装置1伸长或缩短,从而带动输出关节21旋转完成运动,同时霍尔传感器15采集永磁同步电机位置信息,对机械臂进行位置检测与运动控制。
[0027]
以上所述仅为本发明专利的一种实施方式而已,并不用以限制本发明专利,凡在此发明专利的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明专
利的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1