一种吸尘器恒吸力控制方法与流程
1.本发明涉及吸尘器吸力控制领域,具体而言,涉及一种吸尘器恒吸力控制方法。
背景技术:
2.吸尘器是一种应用广泛的清洁工具。吸尘器的工作原理是利用电动机带动叶片高速旋转,在密封的支架内产生空气负压,吸取尘屑。
3.锂电池吸尘器产品在使用过程中电芯电量会逐渐减少,电机两端电压会随着电芯电量的减少而降低,导致电机转速下降,直接导致电机吸力的下降。随着吸尘器使用时间的增加,电机吸力越来越小。
技术实现要素:
4.鉴于此,本发明提供了一种吸尘器恒吸力控制方法,解决了吸尘器电芯电量减少导致电机吸力减小的问题。
5.为此,本发明提供了一种吸尘器恒吸力控制方法,包括以下步骤:
6.1)设定驱动pwm初值、电机转速期望值;
7.2)霍尔检测电路监测电机转速,将获得的电机转速的脉冲信号传输给mcu;
8.3)mcu根据电机转速的脉冲信号得出电机实际转速;
9.4)mcu比较电机实际转速与电机转速期望值,电机实际转速不满足设定条件时,调整电机转速与电机转速期望值相同。
10.进一步地,在步骤2)中,霍尔检测电路包括霍尔传感器,电机主轴上嵌入磁极,电机转动时电机主轴带动磁极一起转动,触发霍尔检测电路中霍尔传感器产生脉冲信号。
11.进一步地,磁极呈圆环状套装在电机主轴前端。
12.进一步地,在步骤2)中,脉冲信号经过霍尔检测电路的信号处理电路处理,得到mcu可检测到的脉冲信号,然后传输给mcu。
13.进一步地,在所述步骤3)中,mcu根据脉冲信号的频率计算出电机实际转速。
14.进一步地,在步骤4)中,mcu通过调整驱动pwm占空比来改变电机的转速。
15.进一步地,在步骤4)中,mcu判断电机实际转速是否在设定的允许变化的范围内,电机实际转速超出允许变化的范围,则调整驱动pwm占空比来改变电机的转速。
16.本发明提供的一种吸尘器恒吸力控制方法中,电机转速的检测方法为:在电机主轴前端嵌入磁极,电机转动时带动磁极一起转动,触发圆盘形磁极侧边固定的霍尔传感器元件产生脉冲信号,该信号经过信号处理电路的处理得mcu可检测到的脉冲信号,mcu计算脉冲的频率,测得电机转速信息。电机转速的控制方法为:mcu通过pwm驱动电路控制电机,调整pwm的占空比,改变电机的转速。
17.为了实现电机的恒速控制,设定电机恒速初值和驱动pwm初值,随着电芯电量下降,电机转速会有所下降,这时根据霍尔检测电路检测到电机转速,调整驱动pwm占空比,进而调整转速和设定初值相同,保持电机转速恒定,电机的吸力恒定。在同样的条件下,电机
转速恒定则电机的吸力恒定,实现吸尘器的恒吸力控制。
18.本发明提供的一种吸尘器恒吸力控制方法,使用霍尔传感器检测电机转速,根据检测到的转速,通过调整电机驱动占空比的方法来控制电机恒定转速,从而达到恒定吸力控制的目的。
附图说明
19.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
20.图1为本发明实施例提供的一种吸尘器恒吸力控制方法中电机控制电路的整体架构;
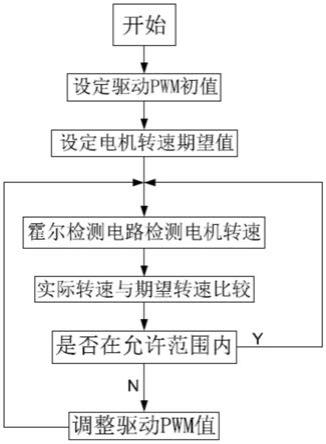
21.图2为本发明实施例提供的一种吸尘器恒吸力控制方法的流程图;
22.图3为本发明实施例提供的一种吸尘器恒吸力控制方法中霍尔检测电路的工作原理示意图。
具体实施方式
23.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
24.实施例一:
25.参见图1至图3,图中示出了本发明实施例一提供的一种吸尘器恒吸力控制方法,包括以下步骤:
26.1)设定驱动pwm初值、电机转速期望值;
27.2)霍尔检测电路监测电机转速,将获得的电机转速的脉冲信号传输给mcu;
28.3)mcu根据电机转速的脉冲信号得出电机实际转速;
29.4)mcu比较电机实际转速与电机转速期望值,电机实际转速不满足设定条件时,调整电机转速与电机转速期望值相同。
30.具体的,参见图1至图3,在步骤2)中,霍尔检测电路包括霍尔传感器,电机主轴上嵌入磁极,电机转动时电机主轴带动磁极一起转动,触发霍尔检测电路中霍尔传感器产生脉冲信号。
31.具体的,参见图1至图3,磁极呈圆环状套装在电机主轴前端。
32.具体的,参见图1至图3,在步骤2)中,脉冲信号经过霍尔检测电路的信号处理电路处理,得到mcu可检测到的脉冲信号,然后传输给mcu。
33.具体的,参见图1至图3,在所述步骤3)中,mcu根据脉冲信号的频率计算出电机实际转速。
34.具体的,参见图1至图3,在步骤4)中,mcu通过调整驱动pwm占空比来改变电机的转速。
35.具体的,参见图1至图3,在步骤4)中,mcu判断电机实际转速是否在设定的允许变
化的范围内,电机实际转速超出允许变化的范围,则调整驱动pwm占空比来改变电机的转速。
36.本发明提供的一种吸尘器恒吸力控制方法中,电机转速的检测方法为:在电机主轴前端嵌入磁极,电机转动时带动磁极一起转动,触发圆盘形磁极侧边固定的霍尔传感器元件产生脉冲信号,该信号经过信号处理电路的处理得mcu可检测到的脉冲信号,mcu计算脉冲的频率,测得电机转速信息。电机转速的控制方法为:mcu通过pwm驱动电路控制电机,调整pwm的占空比,改变电机的转速。
37.为了实现电机的恒速控制,设定电机恒速初值和驱动pwm初值,随着电芯电量下降,电机转速会有所下降,这时根据霍尔检测电路检测到电机转速,调整驱动pwm占空比,进而调整转速和设定初值相同,保持电机转速恒定,电机的吸力恒定。在同样的条件下,电机转速恒定则电机的吸力恒定,实现吸尘器的恒吸力控制。
38.本发明提供的一种吸尘器恒吸力控制方法,使用霍尔传感器检测电机转速,根据检测到的转速,通过调整电机驱动占空比的方法来控制电机恒定转速,从而达到恒定吸力控制的目的。
39.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
技术特征:
1.一种吸尘器恒吸力控制方法,其特征在于,包括以下步骤:1)设定驱动pwm初值、电机转速期望值;2)霍尔检测电路监测电机转速,将获得的电机转速的脉冲信号传输给mcu;3)mcu根据电机转速的脉冲信号得出电机实际转速;4)mcu比较电机实际转速与电机转速期望值,电机实际转速不满足设定条件时,调整电机转速与电机转速期望值相同。2.根据权利要求1所述的一种吸尘器恒吸力控制方法,其特征在于,在所述步骤2)中,霍尔检测电路包括霍尔传感器,电机主轴上嵌入磁极,电机转动时电机主轴带动磁极一起转动,触发霍尔检测电路中霍尔传感器产生脉冲信号。3.根据权利要求2所述的一种吸尘器恒吸力控制方法,其特征在于,所述磁极呈圆环状套装在电机主轴前端。4.根据权利要求2所述的一种吸尘器恒吸力控制方法,其特征在于,在所述步骤2)中,脉冲信号经过霍尔检测电路的信号处理电路处理,得到mcu可检测到的脉冲信号,然后传输给mcu。5.根据权利要求3所述的一种吸尘器恒吸力控制方法,其特征在于,在所述步骤3)中,mcu根据脉冲信号的频率计算出电机实际转速。6.根据权利要求1所述的一种吸尘器恒吸力控制方法,其特征在于,在所述步骤4)中,mcu通过调整驱动pwm占空比来改变电机的转速。7.根据权利要求6所述的一种吸尘器恒吸力控制方法,其特征在于,在所述步骤4)中,mcu判断电机实际转速是否在设定的允许变化的范围内,电机实际转速超出允许变化的范围,则调整驱动pwm占空比来改变电机的转速。
技术总结
本发明提供了一种吸尘器恒吸力控制方法,包括以下步骤:1)设定驱动PWM初值、电机转速期望值;2)霍尔检测电路监测电机转速,将获得的电机转速的脉冲信号传输给MCU;3)MCU根据电机转速的脉冲信号得出电机实际转速;4)MCU比较电机实际转速与电机转速期望值,电机实际转速不满足设定条件时,调整电机转速与电机转速期望值相同。本发明提供的一种吸尘器恒吸力控制方法,使用霍尔传感器检测电机转速,根据检测到的转速,通过调整电机驱动占空比的方法来控制电机恒定转速,从而达到恒定吸力控制的目的。的。的。
技术研发人员:郑尚真 刘广亚 刘捷
受保护的技术使用者:苏州市春菊电器有限公司
技术研发日:2020.08.14
技术公布日:2021/10/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1