一种单电机单轨道光伏清洁机器人的制作方法
1.本实用新型涉及一种光伏清洁机器人,尤其一种单电机单轨道光伏清洁机器人。
背景技术:
2.光伏发电是一种前景非常广阔的清洁能源,我国到2020年预计太阳能发电装机容量将达到1亿千瓦。然而,由于我国的空气质量较差,空气中的灰尘严重影响光伏组件的发电效率。有数据显示,一年不清洗光板组件板,影响发电效率达20%以上,而对积雪只能靠自然融化。因此目前在每个发电站均设置有一套清扫基站,清扫基站固定安装于太阳能电池板上,同时每个发电站还设置有与清扫基站通讯连接的上位机,上位机向清扫基站发送清扫指令,清扫基站按照上位机所发送的指令自动清扫太阳能电池板,但是,本实用新型的实用新型人发现现有的清扫系统存在如下缺陷:现有清扫通过牵引钢绳来带动清扫组件沿光伏组件进行位移,以达到清扫的目的,这种清扫方式,安装比较的麻烦,同时设备投入成本过高,在使用过程中维护成本过高,清扫时无法调节。
3.现有的光伏机器为双电机为主,虽然支撑性能出色,但整体的成本较高,不利于大面积的推广。
技术实现要素:
4.本实用新型主要是解决现有技术中存在的不足,提供一种结构紧凑合理,进一步降低成本,平衡支撑性能出色的一种单电机单轨道光伏清洁机器人。
5.本实用新型的上述技术问题主要是通过下述技术方案得以解决的:
6.一种单电机单轨道光伏清洁机器人,包括传动杆,所述的传动杆通过电机进行驱动,所述的传动杆的左侧端设有齿轮,所述的传动杆的中端与右侧端分别设有支撑轮,所述的电机带动齿轮沿轨道进行行走且支撑轮与齿轮进行同步转动,所述的支撑轮的外周长大于齿轮的运行周长。
7.作为优选,所述的齿轮齿形的直径从下至上逐渐扩大,所述的齿轮齿形为中空齿,所述的轨道中设有与齿轮齿形呈配接的轨道传动孔,所述的轨道传动孔为椭圆状或圆形孔。
8.作为优选,所述的齿轮通过套管与传动杆固定,所述的支撑轮通过法兰与传动杆进行连接。
9.工作原理:电机提供驱动力,带动齿轮一起转动,齿轮通过套管与传动杆连接,此时传动杆可以随着电机一起转动,并带动传动杆上的支撑轮一起旋转,支撑轮通过法兰和传动杆连接,通过齿轮和两个支撑轮支撑着机器人并通过齿轮和带孔轨道的配合在线性方向运动。
10.创新点:
11.1、齿轮与两个支撑轮三点支撑着机器人,支撑轮除了起到支撑作用外,还可以通过与放置面的滚动摩擦力驱动机器人的线性运动;使得机器人能平稳的运行而不发生机器
人整体架构倾斜时引起齿轮与轨道卡死的情况
12.2、支撑轮的外圆周长略大于齿轮运行周长,使得支撑轮处线性运动距离略大于齿轮处的运动距离,有效地防止支撑轮出现打滑情况时机器人整体架构出现倾斜导致的齿轮与轨道卡死
13.3、相比普通产品的双电机或者多电机,本产品只需要单个电机;下口无需安装轨道,能够显著地降低清洁机器人的生产成本
14.本实用新型提供一种单电机单轨道光伏清洁机器人,通过单电机进行传动,平衡性能出色,降低成本。
附图说明
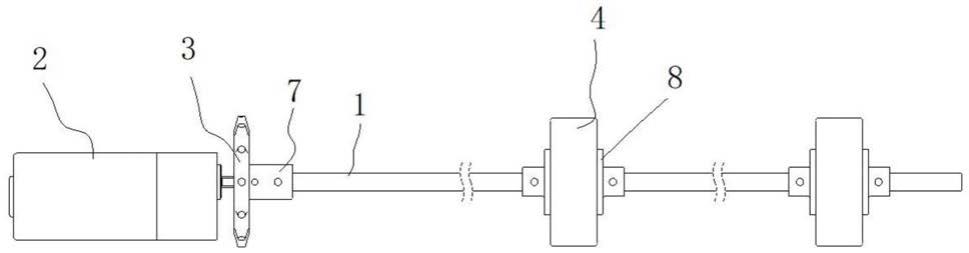
15.图1是本实用新型的结构示意图;
16.图2是本实用新型的立体结构示意图。
具体实施方式
17.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
18.实施例1:如图所示,一种单电机单轨道光伏清洁机器人,包括传动杆1,所述的传动杆1通过电机2进行驱动,所述的传动杆1的左侧端设有齿轮3,所述的传动杆1的中端与右侧端分别设有支撑轮4,所述的电机2带动齿轮3 沿轨道5进行行走且支撑轮4与齿轮3进行同步转动,所述的支撑轮4的外周长大于齿轮3的运行周长。
19.所述的齿轮3齿形的直径从下至上逐渐扩大,所述的齿轮3齿形为中空齿,所述的轨道5中设有与齿轮3齿形呈配接的轨道传动孔6,所述的轨道传动孔 6为椭圆状或圆形孔。
20.所述的齿轮3通过套管7与传动杆1固定,所述的支撑轮4通过法兰8 与传动杆1进行连接。
技术特征:
1.一种单电机单轨道光伏清洁机器人,其特征在于:包括传动杆(1),所述的传动杆(1)通过电机(2)进行驱动,所述的传动杆(1)的左侧端设有齿轮(3),所述的传动杆(1)的中端与右侧端分别设有支撑轮(4),所述的电机(2)带动齿轮(3)沿轨道(5)进行行走且支撑轮(4)与齿轮(3)进行同步转动,所述的支撑轮(4)的外周长大于齿轮(3)的运行周长。2.根据权利要求1所述的一种单电机单轨道光伏清洁机器人,其特征在于:所述的齿轮(3)齿形的直径从下至上逐渐扩大,所述的齿轮(3)齿形为中空齿,所述的轨道(5)中设有与齿轮(3)齿形呈配接的轨道传动孔(6),所述的轨道传动孔(6)为椭圆状或圆形孔。3.根据权利要求1或2所述的一种单电机单轨道光伏清洁机器人,其特征在于:所述的齿轮(3)通过套管(7)与传动杆(1)固定,所述的支撑轮(4)通过法兰(8)与传动杆(1)进行连接。
技术总结
本实用新型涉及一种光伏清洁机器人,尤其一种单电机单轨道光伏清洁机器人。包括传动杆,所述的传动杆通过电机进行驱动,所述的传动杆的左侧端设有齿轮,所述的传动杆的中端与右侧端分别设有支撑轮,所述的电机带动齿轮沿带轨道进行行走且支撑轮与齿轮进行同步转动,所述的支撑轮的外周长大于齿轮的运行周长。通过单电机进行传动,平衡性能出色,降低成本。降低成本。降低成本。
技术研发人员:裴号东 张财 宋鉷 张文超 黄伟
受保护的技术使用者:杭州舜海光伏科技有限公司
技术研发日:2021.02.08
技术公布日:2021/10/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1