一种改进型永磁同步直线电机模型预测电流控制方法与流程
1.本发明涉及一种改进型永磁同步直线电机模型预测电流控制方法,属于电机驱动及控制领域。
背景技术:
2.永磁同步直线电机作为直驱式传动机构的核心单元,具有推力密度大,控制精度高,机械损耗小等优点,被广泛应用在计算机数控车床等高精度设备中。在电机矢量控制系统中,电流环决定了整个电机系统的控制性能。而模型预测控制算法相比于传统的电流控制算法,具有更好的动稳态性能。因此,研究一种满足永磁同步直线电机系统高控制精度要求的模型预测电流控制算法,具有广阔的应用前景。
技术实现要素:
3.技术问题:针对上述现有技术,提出一种改进型永磁同步直线电机模型预测电流控制方法,能够通过较为简单的控制算法提高系统的动稳态性能。
4.技术方案:一种改进型永磁同步直线电机模型预测电流控制方法,包括如下步骤:
5.步骤1:通过光栅尺位置信息采集模块(1)获取电机k时刻电机的电角度θ
e
、并计算电机动子电角速度ω
e
及速度v;
6.步骤2:通过pi控制器(2)得到q轴电流的参考值i
qref
,并给定d轴电流参考值i
dref
=0;
7.步骤3:通过坐标变换模块(3)得到k采样时刻dq坐标系下的电流分量i
d
(k)、i
q
(k);
8.步骤4:经过一阶欧拉方程(4)得到dq坐标系下的离散化定子电流方程,从而确定在k+1 采样时刻的定子电流预测值i
d
(k+1)和i
q
(k+1);
9.步骤5:通过价值函数筛选出最优电压矢量,结合无差拍控制思想,将无差拍控制目标中q轴电流参考值替换为k时刻的q轴电流测量值,构建新的无差拍跟踪方程;
10.步骤6:由电流斜率法模块(5)计算出最优电压矢量和零电压矢量的占空比,输出逆变器驱动信号。
11.作为优化,步骤1所述计算电机动子电角速度ω
e
及速度v的具体方法为:由式(1)得到电角速度ω
e
,由式(2)得到动子速度。
[0012][0013][0014]
式(1)中n
p
为电机极对数,τ为极距;式(2)中dx为位置偏移量。
[0015]
作为优化,步骤3所述的通过坐标变换模块得到k采样时刻dq坐标系下的电流分量i
d
(k)、 i
q
(k)的具体方法为:由电流传感器获取永磁同步直线电机k采样时刻的三相定子电流i
a
(k)、 i
b
(k)和i
c
(k),经公式(3)所示的clark变换后获取k时刻定子电流在αβ轴的分量
i
α
(k)和i
β
(k),再经公式(4)的park变换后得到dq轴的k时刻定子电流分量i
d
(k)和i
q
(k);
[0016][0017][0018]
作为优化,步骤4所述的获取k+1采样时刻的定子电流预测值的具体方法为:根据公式 (5)所示的一阶前馈欧拉方程将公式(6)所示的电流微分方程离散化处理,可得到公式(7)所示的k+1时刻定子电流的预测方程。
[0019][0020]
其中,i
s
(k+1)和i
s
(k)表示k+1时刻和k时刻的电流状态;
[0021][0022]
式中,u
d
、u
q
分别为定子电压d、q轴电压分量;l
d
、l
q
分别为d、q轴电感分量;r为定子电阻;ψ
f
代表永磁体磁链。
[0023][0024]
式中,i
d
(k)、i
q
(k)分别为当前采样时刻的d、q轴电流;i
d
(k+1)、i
q
(k+1)分别为下一采样时刻的d、q轴电流预测值;t
s
为采样周期;u
d
(k)、u
q
(k)分别为当前时刻d、q轴电压;ω
e
(k)为当前时刻动子电角速度。
[0025]
作为优化,步骤5所述的筛选最优电压矢量及构建新的无差拍跟踪方程的具体方法为:构建如式(8)所示的误差评估函数,得到使得价值函数g最小的最优电压矢量u
opt
;将无差拍控制目标中q轴电流参考值替换为k时刻的q轴电流测量值,可得到如式(9)所示的无差拍跟踪方程。
[0026]
g=|i
dref
‑
i
d
(k+1)|2+|i
qref
‑
i
q
(k+1)|2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0027][0028]
作为优化,步骤6由电流斜率法计算出最优电压矢量和零电压矢量的占空比具体过程为:由式(10)计算出在最优电压矢量u
opt
作用下的i
q
电流变化率,由式(11)计算出在零电压矢量u0作用下的i
q
电流变化率。将式(10)和式(11)的计算结果代入如式(12)所示的无
差拍公式,联立式(12)和式(13)得到如式(14)所示的最优电压矢量占空比γ。
[0029][0030][0031]
i
q
(k+1)=i
q
(k)+s
opt
t
opt
+s0t0=i
q
(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0032]
t
opt
+t0=t
s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0033][0034]
式(10)中,u
qopt
为最优电压矢量u
opt
的q轴分量;式(11)中,u
q0
为零电压矢量的q轴分量;式(12)中,t
opt
及t0分别为最优电压矢量和零电压矢量的作用时间,并且满足式(13)的约束条件。
[0035]
有益效果:
[0036]
1)在一个控制周期内作用一个有源电压矢量与零矢量,提高了系统稳态性能;
[0037]
2)将无差拍控制目标由q轴电流的参考值替换为当前采样时刻测量值,消除了传统占空比控制中的电流偏差项,以便于工程实现;
[0038]
3)降低了控制算法对硬件系统的要求,确保了双矢量控制的可靠性。
附图说明
[0039]
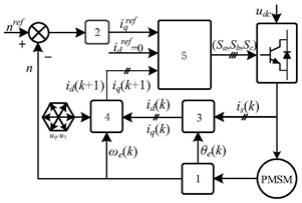
图1为本发明一种改进型永磁同步直线电机模型预测电流控制方法的控制框图,包括 1
‑
光栅尺位置信息采集模块、2
‑
pi控制器模块、3
‑
坐标变换模块、4
‑
一阶欧拉方程模块及5
‑ꢀ
电流斜率法模块模块。
[0040]
图2为本发明一种改进型永磁同步直线电机模型预测电流控制方法的改进型占空比计算示意图。
具体实施方式
[0041]
下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
[0042]
一种改进型永磁同步直线电机模型预测电流控制方法的方法,包括如下步骤:
[0043]
步骤1:计算电机动子电角速度ω
e
及速度v,由式(1)得到电角速度ω
e
,由式(2)得到动子速度。
[0044][0045][0046]
式(1)中n
p
为电机极对数,τ为极距;式(2)中dx为位置偏移量。
[0047]
步骤2:通过pi控制器(2)得到q轴电流的参考值i
qref
,并给定d轴电流参考值i
dref
=0;
[0048]
步骤3:通过坐标变换模块(3)得到k采样时刻dq坐标系下的电流分量i
d
(k)、i
q
(k)的具体方法为:由电流传感器获取永磁同步直线电机k采样时刻的三相定子电流i
a
(k)、i
b
(k)和i
c
(k),经公式(3)所示的clark变换后获取k时刻定子电流在αβ轴的分量i
α
(k)和i
β
(k),再经公式(4) 的park变换后得到dq轴的k时刻定子电流分量i
d
(k)和i
q
(k);
[0049][0050][0051]
步骤4:经过一阶欧拉方程(5)得到dq坐标系下的离散化定子电流方程,从而确定在k+1 采样时刻的定子电流预测值i
d
(k+1)和i
q
(k+1),具体方法为:根据公式(5)所示的一阶前馈欧拉方程将公式(6)所示的电流微分方程离散化处理,可得到公式(7)所示的k+1时刻定子电流的预测方程。
[0052][0053]
其中,i
s
(k+1)和i
s
(k)表示k+1时刻和k时刻的电流状态;
[0054][0055]
式中,u
d
、u
q
分别为定子电压d、q轴电压分量;l
d
、l
q
分别为d、q轴电感分量;;r为定子电阻;ψ
f
代表永磁体磁链。
[0056][0057]
式中,i
d
(k)、i
q
(k)分别为当前采样时刻的d、q轴电流;i
d
(k+1)、i
q
(k+1)分别为下一采样时刻的d、q轴电流预测值;t
s
为采样周期;u
d
(k)、u
q
(k)分别为当前时刻d、q轴电压;ω
e
(k)为当前时刻动子电角速度。
[0058]
步骤5:通过价值函数筛选出最优电压矢量,结合无差拍控制思想,将无差拍控制目标中q轴电流参考值替换为k时刻的q轴电流测量值,构建新的无差拍跟踪方程,具体方法为:构建如式(8)所示的误差评估函数,得到使得价值函数g最小的最优电压矢量u
opt
;将无差拍控制目标中q轴电流参考值替换为k时刻的q轴电流测量值,可得到如式(9)所示的无差拍跟踪方程。
[0059]
g=|i
dref
‑
i
d
(k+1)|2+|i
qref
‑
i
q
(k+1)|2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0060][0061]
步骤6:由电流斜率法模块(5)计算出最优电压矢量和零电压矢量的占空比,输出逆变器驱动信号,具体方法为:由式(10)计算出在最优电压矢量u
opt
作用下的i
q
电流变化率,由式 (11)计算出在零电压矢量u0作用下的i
q
电流变化率。将式(10)和式(11)的计算结果代入如式 (12)所示的无差拍公式,联立式(12)和式(13)得到如式(14)所示的最优电压矢量占空比。
[0062][0063][0064]
i
q
(k+1)=i
q
(k)+s
opt
t
opt
+s0t0=i
q
(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0065]
t
opt
+t0=t
s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0066][0067]
式(10)中,u
qopt
为最优电压矢量u
opt
的q轴分量;式(11)中,u
q0
为零电压矢量的q轴分量;式(12)中,t
opt
及t0分别为最优电压矢量和零电压矢量的作用时间,并且满足式(13)的约束条件。
[0068]
在直流母线电压300v,负载转矩4n
·
m条件下,实施本发明的改进型永磁同步直线电机模型预测电流控制方法。仿真结果如下:从速度波形图中可以看出速度达到给定转速且保持平稳,从电磁推力波形图中可以看出推力稳定、波动小。
[0069]
在直流母线电压300v,负载转矩2n
·
m突变到4n
·
m条件下,实施本发明的改进型永磁同步直线电机模型预测电流控制方法,仿真结果如下:从速度波形图中可以看出在负载转矩突变时,速度有较小波动且迅速恢复平稳,从电磁推力波形图中可以看出推力能迅速增大且保持平稳。
[0070]
在直流母线电压300v,转速由0.2m/s突变到1m/s条件下,实施本发明的改进型永磁同步直线电机模型预测电流控制方法,仿真结果从为速度波形图中可以看出速度能迅速达到给定值。从电磁推力波形图中可以看出推力在速度突变下仍能保持平稳,该系统具有良好的动态性能。
[0071]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1