用于操作具有浮置单元的功率电子转换器设备的方法与流程
1.本发明涉及用于操作功率电子转换器设备的方法、计算机程序和计算机可读介质。此外,本发明涉及一种功率电子转换器设备。
背景技术:
2.文献ep 1 253 706 b1示出了一种具有功率电子转换器设备的电功率转换系统,该功率电子转换器设备包括:(i)转换器电路,该转换器电路包括具有输入端子的输入侧、具有输出端子的三相输出侧、第一转换器和三个第二转换器,每个第二转换器相对于相应相与第一转换器串联连接,所述第二转换器中的每个第二转换器包括具有在dc中间电路中的电容元件和半导体器件的浮置单元,以及(ii)控制设备,该控制设备用于经由脉冲状信号驱动转换器中的至少一个转换器的半导体器件。详细地,转换器电路由作为主转换器的第一转换器和3个辅助浮置单元组成,每一相有一个辅助浮置单元。在这样的转换器电路中,每一相的浮置单元的数目不是固定的,并且更多浮置单元可以被容纳。因此,完整的dc到ac转换电路采用由第一转换器提供的主功率转换器、第二转换器的辅助切换单元、和无源滤波电路的形式。主转换器被示出为使用igct的3电平中性点钳位转换器,但其他拓扑和半导体类型也是可能的。通过浮置单元,可以在半导体器件的帮助下将dc电压与第一转换器的dc电压相加或相减。
3.文献ru 2 269 196 c1和us 7 825 540 b2中的每个描述了具有功率电子转换器设备的非常相似的电功率转换系统。
4.us 6 009 002 a描述了具有npc转换器和连接到npc转换器的ac输出的浮置单元的功率电子电路。三次谐波与功率电子电路的参考振荡混频。可以避免来自浮置单元的能量反馈,并且整个系统的效率可以提高。因此切换损耗可以保持在极低水平。存在经由二极管整流器向单元提供能量的电压源。不需要特殊控制来保持单元电压恒定。由于二极管整流器,唯一的限制是保持能量流为正。
5.dierk等人的在2019年1月31日的springer的第604-724页的“selbstgef
ü
hrte wechselrichter mitspannung”中的“leistungselektronische schaltungen add.funktion,auslegung und anwendung”描述了转换器的控制,其中提到了若干控制方案,诸如优化的脉冲模式和脉冲宽度调制。
6.ep 3 142 236 a1涉及具有优化的脉冲模式的转换器控制,其中优化的脉冲模式适用于使转换器通量参考与转换器通量估计之间的差异最小化。
技术实现要素:
7.本发明的一个目的是提供一种用于使得功率电子转换器设备能够稳定操作的部件。
8.该目的通过独立权利要求的主题来实现。有利的实施例在从属权利要求、在进一步描述中以及在附图中给出,其中所描述的实施例可以单独或以相应实施例的任何组合提
供本发明的特征,除非没有明确排除。
9.本发明的一个方面涉及一种用于操作用于电功率转换系统的功率电子转换器设备的方法。
10.功率电子转换器设备包括转换器电路,该转换器电路包括具有输入端子(其可以是dc端子)的输入侧、以及具有至少一个ac输出端子(诸如三个ac输出端子)的输出侧。转换器电路包括具有半导体器件的第一和/或主转换器,第一转换器连接到输入端子并且提供至少一个ac输出(诸如三个ac输出)。转换器电路还包括连接在第一转换器的ac输出与相应ac输出端子之间的至少一个第二转换器。转换器电路可以包括用于每个输出相的第二转换器。上述第二转换器或每个第二转换器包括至少一个浮置单元或浮置单元的串联连接,其中上述浮置单元或每个浮置单元包括dc中间电路和半导体器件。dc中间电路也可以称为dc链路和/或可以包括至少一个电容器。
11.功率电子转换器设备还可以包括控制器,该控制器被配置用于执行该方法。
12.根据本发明的一个实施例,该方法包括:在切换时刻切换浮置单元的半导体器件,该切换时刻利用优化的脉冲模式或基于载波的脉冲宽度调制而被确定。也可以以这种方式切换第一转换器的半导体器件。必须注意,关于具有一个浮置单元的第二转换器而描述的所有内容也可以指代具有浮置单元的串联连接的第二转换器。
13.根据本发明的一个实施例,该方法还包括:确定浮置单元的(期望的)基波电压分量,该基波电压分量取决于浮置单元的dc中间电路的实际电压v
c af
与dc中间电路的电压的参考值v
c af*
之间的差异。期望的电压分量用于平衡浮置单元、其dc中间电路、特别是那里的电容器。(期望的)基波电压分量可以是在控制器中生成的信号,该信号例如是由pi控制器或滞后控制器生成的,如下文所述。从这个(期望的)基波电压分量,修改后的切换时刻被确定,当被应用于浮置单元的半导体器件时,该修改后的切换时刻在由浮置单元生成的实际电压中产生(真实的)基波电压分量。
14.根据本发明的一个实施例,该方法还包括:通过修改切换时刻来在浮置单元的dc中间电路的实际电压中生成基波电压分量,使得dc中间电路的电压v
c af
位于给定参考电压范围内,特别地,以用于平衡浮置单元的dc中间电路。(期望的)基波电压分量被输入到另外的控制器部分,该部分修改利用优化的脉冲模式和/或基于载波的脉冲宽度调制而确定的切换时刻。
15.根据本发明的一个实施例,基波电压分量是在浮置单元的实际电压中生成的,使得dc中间电路的相应电压v
c af
保持在参考值v
c af*
。特别地,当浮置单元的dc中间电路、特别是电容器平衡和/或处于其参考值时,基波电压分量为零。
16.根据本发明的一个实施例,基波电压分量由pi控制器生成,该pi控制器的输入是对应dc中间电路的实际电压v
c af
与其参考值v
c af*
之间的差异。以这种方式使用滞后控制器也是可能的。
17.根据本发明的一个实施例,pi控制器的可变增益根据流过浮置单元的相电流的基波分量进行调节。pi控制器的比例可变增益可以与基波负载电流的幅值的倒数相乘。
18.根据本发明的一个实施例,具体地,当期望对单元充电时,基波电压分量相对于流过浮置单元的相电流的基波分量的相角在-85
°……
+85
°
范围内。当期望放电时,该角度为95度至265度。
19.根据本发明的一个实施例,具体地,当期望对单元充电时,基波电压分量与相电流的上述基波分量同相。当期望放电时,该角度为180度。
20.根据本发明的一个实施例,该方法还包括:在利用优化的脉冲模式或基于载波的脉宽调制而确定的切换时刻切换第一转换器的半导体器件;通过修改应用于第一转换器的切换时刻在由第一转换器输出的电压中生成和/或修改基波电压分量,其中由第一转换器输出的实际电压中的基波电压分量是根据为浮置单元而确定的(期望的)基波电压分量来被确定的。
21.根据本发明的一个实施例,第一转换器处的电压的基波电压分量被生成和/或修改,使得输出端子处的电压的基波分量被保持恒定。
22.根据本发明的一个实施例,由浮置单元生成的基波电压分量被由第一转换器生成的基波电压分量平衡和/或抵消。换言之,它们的总和可以为零。以这种方式,可以平衡一个或多个浮置单元而不改变整个系统的输出。
23.根据本发明的一个实施例,针对浮置单元的切换时刻通过调节优化的脉冲模式的切换角来修改。浮置单元的半导体器件的切换角的调节可以基于对应切换转变的符号。浮置单元的半导体器件的切换角的调节可以基于与优化的脉冲模式的标称切换角相关的适当增益。
24.根据本发明的一个实施例,当浮置单元利用基于载波的脉冲宽度调制进行切换时,切换时刻通过将基频的正弦信号与基于载波的脉冲宽度调制的参考相加来被修改。
25.根据本发明的一个实施例,当第一转换器和至少一个浮置单元两者利用优化的脉冲模式进行切换时,第一转换器和至少一个浮置单元的优化的脉冲模式被选择使得dc中间电路的电压和第一转换器的输出电压的总和的加权总谐波失真被最小化。
26.本发明的另一实施例涉及一种用于操作用于电功率转换系统的转换器设备的方法,该功率电子转换器设备包括:(i)转换器电路,该转换器电路包括具有输入端子的输入侧、具有输出端子的输出侧、具有半导体器件的第一转换器、以及与第一转换器串联连接的至少一个第二转换器,上述第二转换器包括具有dc中间电路和半导体器件的浮置单元或多个浮置单元的串联连接,每个浮置单元具有dc中间电路和半导体器件,以及(ii)控制设备,该控制设备用于经由脉冲状信号驱动转换器中的至少一个转换器的半导体器件。根据本发明的若干实施例,控制设备通过使用优化的脉冲模式(opp)和/或基于载波的脉冲宽度调制(cb-pwm)信号来驱动至少一个浮置单元的半导体器件,使得一个或多个dc中间电路的相应电压位于给定参考电压范围内。通过浮置单元,可以在半导体器件的帮助下将dc电压与第一转换器的dc电压相加或相减,以生成足够无谐波的期望的输出电压和电流。稳定操作的基本前提是个体浮置单元或其中间电路的电压相对相似。在下文中,中间电路的电压也称为浮置单元的电压。
27.根据本发明的一个实施例,控制设备驱动半导体器件,使得(多个)dc中间电路的(多个)电压保持在它们的参考值。这优选地通过使用平衡例程来进行。
28.两个转换器的脉冲模式可以被选择使得dc中间电路的电压和第一转换器的输出电压的总和的优选地加权的总谐波失真(thd)被最小化。
29.根据本发明的一个实施例,具体地,当需要对单元充电时,用于平衡的浮置单元的每个基波电压分量相对于相电流的基波分量的相角在-85
°……
+85
°
范围内,并且优选地与
相电流的上述基波分量同相。对于放电,可以使用从95
°
到265
°
的角度,优选地为180
°
。
30.根据本发明的一个实施例,用于平衡的基波分量由pi控制器单元和/或滞后控制器单元生成,pi控制器单元和/或滞后控制器的输入是对应dc中间电路的(滤波后的)实际电压与其参考之间的差异。
31.第一转换器处的电压的基波分量可以被修改使得输出端子处的电压的总基波分量保持恒定。
32.根据本发明的一个实施例,转换器设备包括:
33.(i)转换器电路,该转换器电路包括具有输入端子的输入侧、具有输出端子的输出侧、具有半导体器件的第一转换器、以及与第一转换器串联连接的至少一个第二转换器,上述第二转换器包括具有dc中间电路和半导体器件的浮置单元或多个浮置单元的串联连接,每个浮置单元具有dc中间电路和半导体器件,以及
34.(ii)控制设备,该控制设备用于经由脉冲状信号驱动转换器中的至少一个转换器的半导体器件。
35.控制设备可以被布置为通过使用opp和/或cb-pwm信号来驱动至少一个浮置单元的半导体器件,使得一个或多个dc中间电路的相应电压v
c af
处于给定参考电压范围内。通过(多个)浮置单元,可以在半导体器件的帮助下将dc电压与第一转换器的电压相加或相减,以生成足够无失真的期望的输出信号。稳定操作的基本前提是个体单元或其中间电路的电压相对相似。在下文中,中间电路的电压也称为浮置单元的电压。
36.结合用于操作功率电子转换器设备的方法而提及的实施例也应当经过必要的修改后适用于对应功率电子转换器设备,反之亦然。
37.根据本发明的一个实施例,控制设备被布置成驱动半导体器件,使得(多个)浮置单元的(多个)电压保持在它们的参考值。这优选地通过使用平衡例程来进行。
38.两个转换器的脉冲模式可以被选择使得dc中间电路的电压和第一转换器的输出电压的总和的加权总谐波失真(thd)被最小化。
39.根据根据本发明的转换器设备的实施例,对于每个浮置单元,基波浮置电压分量与对应相电流同相或异相180度。
40.功率电子转换器设备、尤其是上述转换器设备的控制器包括控制器单元、尤其是pi控制器单元,其中用于平衡的基波分量是由上述控制器单元生成的,该控制器单元的输入为对应浮置单元的实际电压与参考电压之间的差异。
41.根据根据本发明的转换器设备的实施例,第一转换器处的电压的基波分量被修改使得输出端子处的电压的基波分量被保持恒定。
42.本发明的另一方面涉及一种计算机程序产品,该计算机程序产品包括具有程序代码指令的计算机可执行程序代码部分,该程序代码指令被配置为在被加载到基于计算机的控制设备中时执行如上文和下文所述的方法。
43.本发明的另一方面涉及一种计算机可读介质,该计算机可读介质中存储有这种计算机程序产品。
44.本发明的另一方面涉及一种用于电功率转换系统的功率电子转换器设备,该功率电子转换器设备包括:转换器电路,该转换器电路包括具有输入端子的输入侧、具有至少一个输出端子的输出侧、具有连接到输入端子的半导体器件的第一转换器、以及连接在第一
转换器的ac输出与ac输出端子之间的至少一个第二转换器,上述第二转换器包括具有dc中间电路和半导体器件的至少一个浮置单元;以及用于驱动至少一个浮置单元的半导体器件和可选地驱动第一转换器的半导体器件的控制设备,其中控制设备被配置用于执行如上文和下文所述的方法。本发明的另外的特征从权利要求、附图和附图描述中很清楚。以上在说明书中提及的所有特征和特征组合以及以下在附图描述中提及和/或仅在附图中示出的特征和特征组合不仅以分别指定的组合可用,而且也以其他组合或单独可用。
45.现在,基于优选实施例以及参考附图更详细地解释本发明。
附图说明
46.本发明的这些和其他方面将从下文描述的实施例中变得明显并且参考下文中描述的实施例来阐明。实施例中公开的个体特征可以单独或组合构成本发明的一个方面。不同实施例的特征可以从一个实施例转移到另一实施例。
47.在附图中:
48.图1示出了根据本发明的第一实施例的功率电子转换器设备的具有第一转换器和第二转换器的转换器电路的示意图;
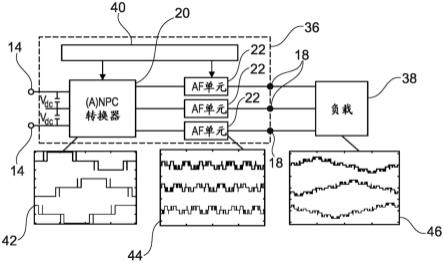
49.图2示出了根据本发明的第二实施例的功率电子转换器设备连同连接到功率电子转换器设备的三相负载的示意图,
50.图3示出了通过使用pi控制器为一个相生成af平衡信号的示意图;
51.图4示出了三相转换器的第一转换器的相电压的基波电压分量的相量的图。
52.图5示出了为了改变基波电压分量的幅值而修改主转换器的切换角;
53.图6示出了控制器和调制器通过opp调制两个转换器的布置示意图;
54.图7示出了控制器和调制器通过opp调制第一转换器并且通过cb-pwm调制第二转换器的布置的示意图;
55.图8示出了控制器和调制器通过cb-pwm调制第一转换器并且通过opp调制第二转换器的布置的示意图。
具体实施方式
56.图1示出了转换器电路10的示意图。转换器电路10示出了三相转换器设备的单相,该三相转换器设备包括具有输入端子14的输入侧12、具有输出端子18的输出侧16、第一转换器20和与第一转换器20串联连接的第二转换器22。第一转换器20是中点钳位(npc)转换器或有源中点钳位(anpc)转换器。它可以是另一种三电平转换器、两电平转换器或三电平以上的转换器。第一(主)转换器20包括电容元件24(描绘为电容器)和半导体器件26。第二转换器22包括多个浮置单元28的串联连接。这些浮置单元28用作有源滤波器(af)并且因此也称为“af单元”或“h桥af单元”。每个浮置单元28包括两对半导体器件30和dc中间电路32,其中电容元件34(被描绘为电容器)互连在两对半导体器件30之间。电容元件34具有在dc中间电路32处导致对应电压v
c af
的电容c
af
。
57.基本af控制目标是补偿三相(3l)(a)npc输出波形谐波,同时将每个af单元电容器电压v
c af
的平均值保持在其参考值(af平衡)。平衡控制概念还应当能够使用浮置单元28作为现有转换器的附加装置。附加控制要求是它对模块化概念的适用性,以确保它可以被很
容易地调节到更高dc链路电压和更高电容器电压以及更多数目的浮置单元28。
58.图2示出了根据第一实施例的功率电子转换器设备36和连接到转换器设备36的输出侧20的负载38。转换器设备36包括转换器电路10和控制设备40,控制设备40用于经由脉冲状信号驱动转换器20、22中的至少一个转换器的半导体器件26、30。控制设备40通过使用opp或cb-pwm来驱动半导体器件26、30,使得dc中间电路32的相应电压v
c af
是平衡的,这表示它位于给定参考电压范围内。
59.在该示例中,第一转换器20和浮置单元28由用于三相负载38的opp调制。3l(a)npc的切换转变的步长高于af切换转变的步长。两个转换器20、22的脉冲模式必须以这样的方式计算,即,第一转换器20和第二转换器22的(多个)单元28的电压42、44的总和的加权总谐波失真(加权thd)被最小化。也可以考虑其他目标函数。此外,基波电压分量必须仅由第一转换器20(3l(a)npc转换器)生成,(多个)浮置单元28的基波电压分量为零,因为它不能提供有功功率。在负载38处产生的电压46被描绘为三相电压曲线。
60.opp调制的浮置单元28需要一种平衡机制,该平衡机制能够确保电容元件34(用作中间浮置电容器)的平均电压保持恒定并且接近其参考。本发明提出了两种平衡方法。
61.当期望充电时,该方法基于优选地与负载电流同相的基波af电压分量的注入。对于放电,优选角度是180
°
。平衡所需要的af基波分量优选地由pi控制器单元48生成,pi控制器单元48的输入是af电容器的(滤波后的)实际电压vc af与平均值参考值vc af*之间的差异,如图3所示。pi控制器单元48的比例增益可以乘以基波负载电流的幅值的倒数,以保持平衡回路的增益恒定并且独立于负载电流。对于低电流,增益可以限制为特定值,以避免标称切换角发生非常大的变化。pi控制器单元48的输出给出对应浮置单元28的期望的af基波分量的幅值。每一相应当具有一个这样的控制器,并且每一相中af电容器电压的控制独立于其他相。
62.除了修改af基波电压分量外,还必须相应地修改3l(a)npc基波分量,以保持负载端子处的电压的基波分量相同。期望的基波3l(a)npc相电压分量的计算是在3l(a)npc和af的基波电压分量的相量的帮助下进行的,如图4所示。在相量图的帮助下,期望的3l(a)npc相量可以根据针对给定的af基波分量相量的标称opp的基波分量来计算:
[0063][0064]
从上面的等式,可以计算期望的3l(a)npc基波分量的幅值和相位θ。从前者,可以计算基波3l(a)npc电压的幅值的必要变化
[0065][0066]
接下来的部分描述如何修改标称切换角,以便在每一相中生成必要的3l(a)npc和af基波分量。
[0067]
通过在2π,α
npc i
内适当修改原始3l(a)npc脉冲模式的切换角,其中索引i是指第i切换转变δu
npc i
,可以生成期望的3l(a)npc基波分量。针对这种修改可以使用不同方法。在这个特定实现中,它分两步进行,一个是获取期望的幅值,一个是获取期望的相位:
[0068]
1)在第一步中,通过向每个3l(a)npc切换角添加角度δαnpci来修改基波分量的幅值:
[0069]
δα
npci
=k
·
s(δu
npci
)
·gnpc
·
δm
npc
,
ꢀꢀ
(3)
[0070]
其中
[0071]
δm
npc
=δv
npc
/v
dc
,
[0072]
第一转换器(尤其是3l(a)npc转换器)20的总dc链路电压为2vdc,这在图2中也可见。k的符号取决于切换角所位于的标称脉冲模式的基波分量的半周期。这在图5中例示。等式(5)的g
npc
·
δm
npc
部分与实际标称切换角无关,这表示变化的绝对值对于所有切换角都是相同的,只有符号取决于切换角。增益gnpc定义了这种变化应当有多大才能实现调制指数的期望变化。当我们在四分之一波周期内只有一个切换角并且opp具有半波和四分之一波对称性时,可以分析性地计算必要的增益
[0073]
对于更多数目的切换角,增益g
npc
作为调制指数的函数进行计算并且存储在opp中。它是通过以下方式来计算的:将标称3l(a)npc切换角改变达δα
npci
=k
·
sgin(δu
npci
)
·
δα
npc
并且计算导致3l(a)npc的调制指数的变化δm
npc
:
[0074]gnpc
=δα
npc
/δm
npc
。
ꢀꢀꢀꢀꢀꢀ
(6)
[0075]
2)随后,将先前计算的角度θ与每个3l(a)npc标称切换角相加,以获取3l(a)npc基波电压的期望相位。修改后的3l(a)npc切换角因此将是:
[0076]
α
npci
=α
npci nom
+δα
npci-θ。
ꢀꢀꢀ
(7)
[0077]
对于b相和c相的相差为
±
2π/3的三相负载,每一相中的修改后的3l(a)npc切换角可以表示为:
[0078][0079]
期望的af调制指数可以经由对应相的原始af切换角(af调制指数为零)的较小修改来实现。在这些修改进行之前,将先前定义的角度θ与af的标称切换角相加,以避免第一转换器20和第二转换器22(3l(a)npc和af)的脉冲模式之间的不匹配:
[0080]
α
′
afi
=α
afi nom-θ,
ꢀꢀꢀꢀꢀꢀ
(9)
[0081]
其中αafi nom是第i标称af切换角。
[0082]
可以使用不同方法来注入基波分量,例如,优选地基于以下公式来修改切换角:
[0083][0084]
其中δu
afi
是与第i切换角α
afi
相对应的切换转变,是af基波分量的期望相位。优选地,设置等于负载电压和负载电流的基波分量之间的相差,该相差在图4中表示为这样,注入的af电压分量与负载电流同相,并且我们可以更有效地对af电容器充电或放电。
[0085]
对于期望的af调制指数m
af
,必须相应地选择量δα
afmax
。这是通过将m
af
乘以增益来进行的,该增益是opp特定的,并且对于标称切换角的相对较小变化是近似恒定的:
[0086]gaf
=δα
afmax
/m
af
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
1]。两相之差保持不变,但三相之和不同。是否选择冗余矢量是基于使用电容器传递函数和所测量的相电流来预测三相中一个采样间隔之后电容器电压的演变。
[0101]
然而,冗余矢量的使用将增加浮置单元的半导体的切换频率。切换频率可以通过选择适当长的地平线(多于一个采样间隔)来优化,并且包括在选择冗余矢量时发生的必要切换动作的数目的惩罚,这将使三个电容器电压在所考虑的地平线上彼此接近。然后通过(3)-(13)中描述的切换角修改使三相电容器的(相等)电压达到期望的参考值。由于每一相的电压被认为是相等的,因此主转换器和浮置单元(由图4中的相量示出)的必要基波分量对于所有三相是相同的。与a相相比,只有-2π/3和+2π/3的相移将分别出现在b相和c相中。
[0102]
必须小心处理的一种特殊情况是主转换器的一个或多个切换角与浮置单元的一个或多个切换角相同。因此,仅剩余af切换角(与主转换器的任何切换角都不相同)用于生成浮置单元的基波分量。此外,在这种情况下,主转换器的切换角的修改也生成浮置单元中的基波分量。这必须用上述浮置单元的剩余切换角来补偿。由主转换器的切换角的修改生成的af基波电压分量由下式给出
[0103][0104]
其中r
af
是浮置单元的电压与主转换器的dc链路电压的一半之间的比率。浮置单元的剩余切换角的补偿项因此计算为:
[0105]
δα
af,i,dm,comp
=2
·raf
·
δm
npc
·gaf
·
sign(δu
af,i
)
·
sin(α
af,i-θ)
· (18)
[0106]
当主转换器的切换角被修改以平衡中性点时,例如,当主转换器为3l(a)npc时,同样的原理也适用。由于与主转换器的一些同时切换而将出现在浮置单元中的cm分量必须通过浮置单元的剩余切换角来补偿。
[0107]
如果将cb-pwm用于(多个)h桥单元28,则先前讨论的修改仅应用于第一转换器20(模块54、58、60)的切换角。通过简单地将基频的合适正弦信号(由函数发生器64生成)与af的cb-pwm参考(提供给对应调制器模块62)相加,对af切换时刻进行必要修改。该信号的幅值等于除以af电压,并且其相位优选地等于负载电流的相位,如图7所示。在这种情况下,af的标称切换时刻通过比较参考信号与载波信号来计算,该参考信号等于3l(a)npc参考信号与3l(a)npc输出切换状态之间的差异。上述“标称”参考信号实质上等于3l(a)npc输出电压谐波之和。
[0108]
如果将cb-pwm用于第一转换器20,则先前讨论的修改仅应用于af的切换角。3l(a)npc切换时刻的必要修改是通过适当修改其cb-pwm参考来进行的,如图8所示。正弦参考的幅值等于mnpc nom+δmnpc,并且其相位等于θ。如果需要,还可以将cm分量与该正弦参考相加。当af单元和/或主转换器由opp调制时,所提出的平衡方案有助于平衡af单元电容器电压。与cb-pwm或其他调制方法相比,在很多情况下,通过opp调制,可以实现改进的输出电压质量。
[0109]
控制算法可以在任何计算硬件上实现,包括dsp、fpga、微控制器、cpu、gpu、多核平台及其组合。
[0110]
在本发明的描述中,第一转换器20是3l(a)npc转换器,但是相同方法可以应用于其他类型的三电平转换器,包括中性点引导的3l转换器。本发明还可以应用于两电平的主转换器或三电平以上的主转换器。
[0111]
在下文中,将再次介绍该方法的实现的重要方面:
[0112]
1.第二转换器22包括一个或多个辅助单元28;
[0113]
2.第一转换器20和第二转换器22的调制基于opp,或者仅第一转换器20的调制基于opp并且cb-pwm用于第二转换器22,或者仅第二转换器22的调制基于opp并且cb-pwm用于第一转换器20;
[0114]
3.opp预先计算并且存储在查找表中;
[0115]
4.查找表中的条目包含切换角以及作为调制指数和脉冲数的函数的对应的第一转换器或第二转换器切换状态;
[0116]
5.第二转换器22输出电压,该电压用于针对不同目标函数来优化第一转换器20和第二转换器22的生成电压的总和的波形。
[0117]
6.上述opp的计算可以针对不同目标函数和性能权衡来计算。例如,不同opp可以提供相电流的谐波失真、输出处的共模电压和浮置电容器电压纹波的不同行为;
[0118]
7.存在用于检测或估计第二转换器22的电容性h桥元件(浮置电容器)34的电压的部件;
[0119]
8.浮置电容器34的平均电压通过以下方式被保持为其参考值:修改存储在查找表中的第一转换器和第二转换器22的标称切换角,或者如果cb-pwm用于第二转换器22,则修改第一转换器的标称切换角和第二转换器的参考信号,或者如果cb-pwm用于第一转换器,则修改第一转换器20的参考信号和第二转换器的标称切换角;
[0120]
9.切换角的改变基于优选地对应于第一转换器20和第二转换器22的基波电压分量的幅值的操纵量;
[0121]
10.操纵量优选地由pi控制单元48'、滞后控制器70或这两者的组合生成。控制器48'、70的输入是电容器电压与其参考值的偏差;
[0122]
11.负载电流值的幅值也可以输入到pi控制单元48',使得也可以基于它来调节切换角的修改;
[0123]
12.切换角的变化受到与一个相的下一和上一切换角相关的限制,并且可能受到与其他相的下一和上一切换角相关的限制;以及
[0124]
13.第二转换器22的电容器电压纹波通过以下方式被考虑在内:滞后控制器70的适当滞后界限,或者针对pi控制单元在合适地选择的时间窗口(例如,基波周期的一半)内使用移动平均滤波器对测量电压进行滤波,或者通过适当地调节pi控制单元48'的带宽。
[0125]
附图标记列表
[0126]
10:转换器电路
[0127]
12:输入侧
[0128]
14:输入端子
[0129]
16:输出侧
[0130]
18:输出端子
[0131]
20:第一转换器
[0132]
22:第二转换器
[0133]
24:电容元件
[0134]
26:半导体器件
[0135]
28:浮置单元
[0136]
30:半导体器件
[0137]
32:dc中间电路
[0138]
34:电容元件
[0139]
36:转换器设备
[0140]
38:负载
[0141]
40:控制设备
[0142]
42:电压(第一转换器)
[0143]
44:电压(第二转换器)
[0144]
46:电压(负载处)
[0145]
48:pi控制器单元——方法1
[0146]
48':pi控制器单元——方法2
[0147]
50:平衡控制单元
[0148]
52:调制器单元
[0149]
54:计算单元
[0150]
56:计算单元
[0151]
58:计算单元
[0152]
60:第一调制器
[0153]
62:第二调制器
[0154]
64:函数发生器
[0155]
66:第一切换单元
[0156]
68:第二切换单元
[0157]
70:迟滞控制器单元
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1