一种无上位机控制信号的自控制双速电机控制办法的制作方法
1.本发明涉及电机控制相关技术领域,具体是一种无上位机控制信号的自控制双速电机控制办法。
背景技术:
2.市面上有许多无上位机控制的风机,即通电就转,转速转向固定,不可控制。客户端无法通过自己现有的手段控制转速或转向,以灵活的适应实际使用需求。
3.现有技术,一般是通过在控制板上增加一个跳线(跳线电阻、跳线帽),控制一个基准电压(5v或者3.3v)输入mcu的io口(接通有高电平输入,不接通则是低电平),两种不同电平控制两种电机运行状态或者直接烧写不同程序控制电机运行状态。以往办法需要拆开电机,因是非专业人员拆装,容易损坏电机或控制板。另电机厂一般是不允许私自拆机,强行拆机则不予保修。
技术实现要素:
4.本发明的目的在于提供一种无上位机控制信号的自控制双速电机控制办法,以解决现有技术中的问题。
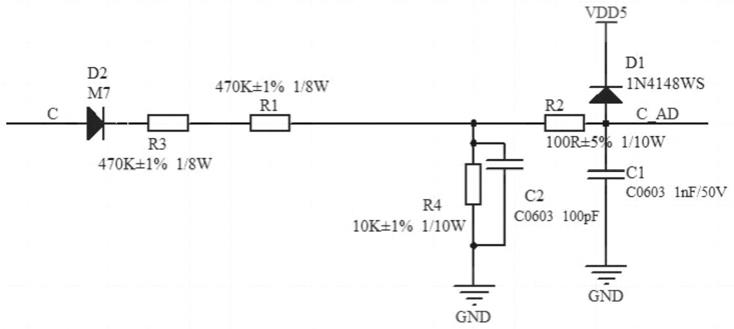
5.为实现上述目的,本发明提供如下技术方案:一种无上位机控制信号的自控制双速电机控制办法,所述二级管d2的正极连接有控制线,所述二级管d2的负极连接有电阻r3,所述电阻r3连接有电阻r1,所述电阻r1分别连接有电阻r2和电阻r4,所述电阻r4上并联有电容c2,所述电阻r2分别连接有二级管d1、电容c1和c_ad,所述二级管d1的负极连接有电源电压vdd5;所述二级管d4的正极连接有l线,电阻r7,所述二级管d4的负极连接有电阻r7,所述电阻r7连接有电阻r5,所述电阻r5分别连接有电阻r6和电阻r8,所述电阻r8上并联有电容c4,所述电阻r6分别连接有二级管d3、电容c3和acl_ad,所述二级管d3的负极连接有电源电压vdd5。
6.优选的,所述c_ad接mcu 任意一个ad口。
7.优选的,所述acl_ad接mcu任意一个ad口。
8.优选的,所述c端控制线空置或与零线并接时,控制状态设置为状态1;所述c端控制线与火线并接时,控制状态设置为状态2。
9.优选的,其算法包括以下步骤:s1:mcu上电后,延时1秒再开始采样,采样并计算完成后决定转向/转速,启动电机,启动电机后跳出运行状态判断,后续除非故障重启,否则不再判断运行状态;s2:c_ad和acl_ad同时采样,采样频率为1000次/秒,采样1000次,也可根据实际情况增加采样点数,c_ad的采样值为adc1,acl_ad的采样值为adc2;s3:每次采样后将adc1 和adc2的值做差,并取绝对值value1;s4:判断1:判断value1的值是否大于value2;s5:如果判断1为真,则累计value1的值大于value2的次数cont1,否则累计次数为
cont2;s6:判断2:判断cont1的值是否大于cont2;s7:如果判断2为真,则执行电机运行状态1;如果判断2为假,则执行电机运行状态2。
10.与现有技术相比,本发明的有益效果是:通过改变c端口的接线方式,控制电机不同的运行状态;硬件电路简单可靠;软件算法简单高效;无需采用专用传感器,成本低,效果明显。
附图说明
11.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1为本发明二级管d2接线的电路图。
12.图2为本发明二级管d4接线的电路图。
13.图3为本发明acl端实际连接交流输入火线的波形图。
14.图4为本发明c端空置(悬空)时的波形图。
15.图5为本发明c端并接零线(n)的波形图。
16.图6为本发明c端并接零线(l)的波形图。
具体实施方式
17.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
18.请参阅图1
‑
6,本发明实施例中,一种无上位机控制信号的自控制双速电机控制办法,所述二级管d2的正极连接有控制线,所述二级管d2的负极连接有电阻r3,所述电阻r3连接有电阻r1,所述电阻r1分别连接有电阻r2和电阻r4,所述电阻r4上并联有电容c2,所述电阻r2分别连接有二级管d1、电容c1和c_ad,所述二级管d1的负极连接有电源电压vdd5;所述二级管d4的正极连接有l线,电阻r7,所述二级管d4的负极连接有电阻r7,所述电阻r7连接有电阻r5,所述电阻r5分别连接有电阻r6和电阻r8,所述电阻r8上并联有电容c4,所述电阻r6分别连接有二级管d3、电容c3和acl_ad,所述二级管d3的负极连接有电源电压vdd5。
19.优选的,所述c_ad接mcu 任意一个ad口。
20.优选的,所述acl_ad接mcu任意一个ad口。
21.优选的,所述c端控制线空置或与零线并接时,控制状态设置为状态1;所述c端控制线与火线并接时,控制状态设置为状态2。
22.优选的,其算法包括以下步骤:
s1:mcu上电后,延时1秒再开始采样,采样并计算完成后决定转向/转速,启动电机,启动电机后跳出运行状态判断,后续除非故障重启,否则不再判断运行状态;s2:c_ad和acl_ad同时采样,采样频率为1000次/秒,采样1000次,也可根据实际情况增加采样点数,c_ad的采样值为adc1,acl_ad的采样值为adc2;s3:每次采样后将adc1 和adc2的值做差,并取绝对值value1;s4:判断1:判断value1的值是否大于value2;s5:如果判断1为真,则累计value1的值大于value2的次数cont1,否则累计次数为cont2;s6:判断2:判断cont1的值是否大于cont2;s7:如果判断2为真,则执行电机运行状态1;如果判断2为假,则执行电机运行状态2。
23.acl端实际连接交流输入火线(l),为交流220v正弦波形。经过d4半波整流后在acl_ad处采样到的是一个峰值约为2.3v 的半波(如下图3)。
24.当c端空置(悬空)时,经过d2半波整流后在c_ad处采样到的是一个电压约为0v的全低电平(如下图4)。
25.当c端并接零线(n),为交流220v正弦波形。经过d2半波整流后在c_ad处采样到的是一个峰值约为2.3v 的半波(如下图5)。
26.当c端并接零线(l),为交流220v正弦波形。经过d2半波整流后在c_ad处采样到的是一个峰值约为2.3v 的半波(如下图6)。
27.实际应用时的说明:应用状态1:当控制线(c线)空置时,c_ad采样波形应为图4,acl_ad采样波形应为图形3;同时采样时,在第一个半波和第三个半波,会有先对较大的差值出现(即软件采样计算值value1会有多次出现大于value2的情况)。
28.应用状态2:当控制线(c线)接零线(n)时,c_ad采样波形应为图5,acl_ad采样波形应为图形2;同时采样时,c_ad采样波形位半波时acl_ad采样波形为全低波形,在采样全程都会有先对较大的差值出现(即软件采样计算值value1会有多次出现大于value2的情况)。
29.应用状态3:当控制线(c线)接火线(l)时,c_ad采样波形应为图6,acl_ad采样波形应为图形3。两者实际是采样的同一条交流线(火线l),在理想状态下,两者采样波形应为完全重合,采样计算值value1会非常小或者几乎为零。故软件采样计算值value1不会有出现大于value2的情况或者次数较少,达不到cont1大于cont2的条件。
30.以上应用状态1、应用状态2会在软件判断时判断为运行状态1,应用状态2判断为运行状态2。
31.软件算法说明:mcu上电后,延时1秒再开始采样(防止开关通断时波动过大),采样并计算完成后决定转向/转速,启动电机,启动电机后跳出运行状态判断,后续除非故障重启,否则不再判断运行状态。c_ad(采样值adc1)和acl_ad(采样值adc2) 同时采样, 采样频率为1000次/秒,采样1000次,也可根据实际情况增加采样点数。每次采样后将adc1和adc2的值做差,并取绝对值(value1)。判断(判断1)value1的值是否大于value2(一个用于比较并判断adc1,adc2差值的值,需要跟具实际情况设定)。如果判断1为真,则累计value1的值大于value2的
次数(cont1);判断(判断2)cont1的值是否大于cont2(一个用于比较和判断adc1,adc2差异大小的值,需要跟具实际情况设定)。如果判断2为真,则执行电机运行状态1。如果判断2为假,则执行电机运行状态2本发明的工作原理是:通过改变c端口的接线方式,控制电机不同的运行状态。
32.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1