一种双悬浮力无轴承异步电机的矢量控制方法
1.本发明属于电气传动控制设备的技术领域,尤其是一种双悬浮力无轴承异步电机的矢量控制方法。
背景技术:
2.随着现代工业的发展,电机的应用越来越广,其要求也越来越高。无轴承电机利用磁轴承和电机定子结构的相似性,在普通电机上巧妙地嵌入一套悬浮力绕组,分别控制悬浮力绕组和转矩绕组中的电流就可以同时实现稳定悬浮和无摩擦旋转。与普通电机相比,无轴承电机具有无机械摩擦、磨损、无需润滑等优点,在航空航天、高速硬盘、飞轮储能、生物医学以及无菌无污染操作的特种电气领域具有广阔的应用前景。
3.无轴承异步电机兼顾了无轴承电机和异步电机的优点,随着研究的深入,其控制理论与方法也不断发展和完善。由于无轴承异步电机气隙小,同时舍弃了传统的机械轴承,任何外部干扰都可能导致电机扫膛,严重时会造成事故。因此,如何减小电机转子抖振,提高悬浮控制精度是无轴承异步电机研究与发展的最基础问题。
4.目前,关于无轴承异步电机的悬浮力与转矩独立控制已提出多种解实现方法。中国专利申请号为cn201811125660.7,名称为:无轴承异步电机的独立逆解耦控制系统,可实现无轴承异步电机的动态解耦控制、简化系统模型的复杂性、避免磁悬浮系统逆模型对转矩系统磁场定向方式的依赖,尤其适用于对动态控制性能要求较高的高速电机驱动应用场合。中国专利申请号为cn201510104159.2,名称为:无轴承异步电机的定子磁链定向逆解耦控制系统,在定子磁链定向原系统之前,使系统解耦为四个线性子系统:一阶转速子系统、一阶定子磁链子系统及α和β两个径向位移二阶子系统,四个线性子系统分别对应连接所述四个调节器,该四个调节器又分别连接到定子磁链定向逆系统,构成闭环控制系统。上述两种解耦方法都依赖于电机精确的数学模型,而电机在实际运行中参数会不断变化,直接影响上述方法的控制精度。同时,上述方法都是基于单悬浮力无轴承异步电机所研究,将电流分解到d、q轴上,仅通过改变d、q轴电流控制电机悬浮力大小与方向,很容易受到电机外部因素干扰。
技术实现要素:
5.为了解决现有技术中存在的不足,本发明针对一种双悬浮力无轴承异步电机的矢量控制方法。
6.本发明所采用的技术方案如下:
7.一种双悬浮力无轴承异步电机的矢量控制方法,包括如下步骤:
8.s1、基于双悬浮力无轴承电机,建立其数学模型,包括磁链方程、电压方程以及悬浮力方程;所述悬浮力方程包括主控悬浮力方程和辅助悬浮力方程;
9.s2、对主控悬浮力方程进行优化;
10.s3、对双悬浮力无轴承异步电机的矢量控制;
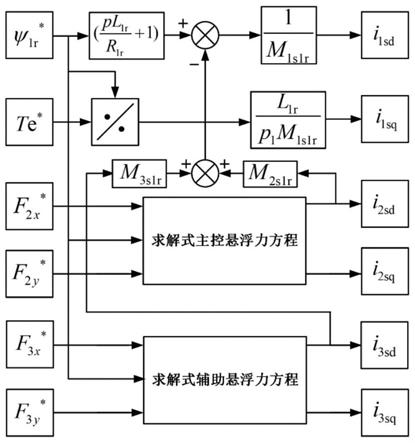
11.s4、基于s2和s3中的双悬浮力无轴承异步电机转子磁链方程、优化后的悬浮力方程和电磁转矩方程进行转子磁场定向的解耦方法为:将给定电磁转矩te
*
、转子磁链ψ
1r*
、主控悬浮力在x、y轴上的分量f
2x*
、f
2y*
、辅助悬浮力在x、y轴上的分量f
3x*
、f
3y*
作为输入,根据式电机电磁转矩方程计算出i
1sq
、根据转子磁链方程计算出i
1sd
、根据主控悬浮力方程计算出i
2sd
和i
2sq
、根据辅助悬浮力公式计算出i
3sd
和i
3sq
。
12.进一步,构建双悬浮力无轴承异步电机在α、β坐标系下的两相磁链方程:
[0013][0014]
以转子磁链、转矩绕组电流、主控悬浮力绕组电流以及辅助悬浮力绕组电流作为自变量,反解出双悬浮力无轴承异步电机转子电流在α、β轴上的分量:
[0015][0016]
根据i
1rα
、i
1rβ
进一步化简双悬浮力无轴承异步电机的定子磁链方程:
[0017][0018][0019][0020]
其中,ψ
1sα
、ψ
2sα
、ψ
3sα
、ψ
1rα
分别为转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组磁链在α轴上的分量;ψ
1sβ
、ψ
2sβ
、ψ
3sβ
、ψ
1rβ
分别为转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组磁链在β轴上的分量;l
1s
、l
2s
、l
3s
、l
1r
分别为转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组的自感;m
1s2s
、m
1s3s
、m
1s1r
、m
2s3s
、m
2s1r
、m
3s1r
为转矩绕组和主控悬浮力绕组、转矩绕组和辅助悬浮力绕组、转矩绕组和转子绕组、主控悬浮力绕组和辅助悬浮力绕组、主控悬浮力绕组和转子绕组、辅助悬浮力绕组和转子绕组之间的互感。i
1sα
、i
2sα
、i
3sα
和i
1rα
分别是转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组电流在α轴上的分
量;i
1sβ
、i
2sβ
、i
3sβ
和i
1rβ
分别是转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组电流在β轴上的分量。
[0021]
进一步,构建双悬浮力无轴承异步电机在α、β轴上的转子电压方程:
[0022][0023]
其中,u
rα
、u
rβ
为转子电压在α、β轴上的分量;r
1r
是转子电阻;ω
r
是转子角频率;t为时间变量;p为微分算子;i
rα
、i
rβ
分别是转子电流在α、β轴上的分量;
[0024]
进一步,构建双悬浮力无轴承异步电机在d、q轴上的转子电压方程:
[0025][0026]
其中,u
rd
、u
rq
为转子电压在d、q轴上的分量;ψ
1rd
、ψ
1rq
为转子磁链在d、q轴上的分量;i
1sd
、i
2sd
、i
3sd
为转矩绕组、主控悬浮力绕组以及辅助悬浮力绕组电流在d、q轴上的分量;ω为转矩绕组电角频率。
[0027]
进一步,构建双悬浮力无轴承异步电机的悬浮力方程:
[0028]
代入p1=2,p2=1,p3=3化简得:
[0029]
式中,f
2m
和f
3m
分别为主控悬浮力方程和辅助悬浮力方程;ψ1为转矩绕组气隙磁链;和分别为主控悬浮力定子电流和辅助悬浮力定子电流;μ0为真空磁导率;l为电机转子有效铁心长度;r为转子半径;w1和w2分别为转矩绕组和悬浮力绕组每相串联的有效匝数;
[0030]
根据向量的点乘和叉乘原理,将无轴承异步电机主控悬浮力分解到d、q轴上:
[0031][0032]
其中,f
2x
、f
2y
为主控悬浮力在x、y轴上的分量;i
2sd
和i
2sq
为主控悬浮力绕组电流在x、y轴上的分量;ψ
1d
和ψ
1q
为转矩绕组气隙磁链在x、y轴上的分量;k2为一常数,表示为
[0033]
根据向量的点乘和叉乘原理,将无轴承异步电机辅助悬浮力分解到d、q轴上:
[0034][0035]
其中,f
3x
、f
3y
为辅助悬浮力在x、y轴上的分量,k3为一常数,表示为
[0036]
进一步,对主控悬浮力方程的优化过程为:
[0037]
s2.1、构建bim电压平衡方程:
[0038]
其中,和为转矩绕组和主控悬浮力绕组的定子电压,和为其定子电流,z
1s
和z
2s
为其定子阻抗,和为其定子感应电动势,x
m
为其互漏抗,为转子感应电动势,为转子电流,z
r
为转子等效阻抗。第二项可进一步化为:k
w
为主控悬浮力绕组和转矩绕组匝数比;j为虚数符号;μ、λ分别为转矩绕组和主控悬浮力绕组的磁场初始相位角。
[0039]
s2.2、进一步将s2.1中的第二项改写为:
[0040]
式中,k
w
为主控悬浮力绕组和转矩绕组匝数比。
[0041]
s2.3、为使两套绕组的互漏感系数互逆,将悬浮力绕组电流等效为由此得到:
[0042][0043]
其中,x'
m
=x
m
/k
w
,z'
s2
=z
s2
/k
2w
。
[0044]
s2.4、进一步,将转子绕组参数折算到定子绕组上,构建转子电压平衡方程:
[0045]
其中转子感应电势由转矩绕组和主控悬浮力绕组叠加产生,进一步将转子电流化简为:
[0046]
其中、和x
r
为转子静止时转矩绕组和主控悬浮力绕组的转子感应电动势和转子漏抗,s1和s2为转矩绕组和主控悬浮力绕组的转差率。r
r
为转子电阻。
[0047]
s2.5、根据s2.4推导出主控悬浮力绕组模块的等效电阻r
re
:
[0048]
取k
w
=1且λ=μ,进一步化为:
[0049]
s2.6、根据s2.5,同时将转矩绕组和主控悬浮力绕组线径、匝数、材料参数设为一致,进一步构建主控悬浮绕组励磁电流方程
[0050][0051]
其中,k
m
为励磁电流系数,表示为x
s
为转绕组和主控悬浮力绕组的定子漏抗,r
s
为定子电阻。
[0052]
s2.7、根据s2.6对双悬浮力无轴承异步电机的主控悬浮力方程进行优化,在传统数学公式后乘以励磁电流系数,得到:
[0053][0054]
其中,ψ1为定子磁链,i
2s
为主控悬浮力绕组电流;ψ
1d
、ψ
1q
为定子磁链在d、q轴上的分量。
[0055]
进一步,对双悬浮力无轴承异步电机的矢量控制过程如下:
[0056]
s3.1、采用转子磁场定向矢量控制策略,令其中ψ
1r
为转子磁链,同时由于转子导条内部短路,有u
rd
=u
rq
=0,将其代入s2.1.5中的转子电压方程:
[0057][0058][0059]
s3.2、无轴承异步电机转矩绕组气隙磁链和转子磁链的关系:
[0060]
其中,l
1rσ
为转矩绕组的转子漏感,i
1sd
和i
1sq
为转矩绕组定子电流在d、q轴上的分量。
[0061]
s3.3、将s3.2中的转矩绕组气隙磁链和转子磁链带入s2.7中优化后的双悬浮力无轴承异步电机的主控悬浮力计算式中,构建基于转子磁场定向的主控悬浮力方程:
[0062][0063]
s3.3、将s3.2中的转矩绕组气隙磁链和转子磁链带入s1.6中的双悬浮力无轴承异步电机的辅助悬浮力计算式中,构建基于转子磁场定向的辅助悬浮力方程:
[0064][0065]
s3.4、进一步,构建无轴承异步电机的电磁转矩方程的过程为:将ψ
1rd
=ψ
1r
,ψ
1rq
=0代电机转矩方程t
e
中,得到:ψ
1r
为转子磁链。
[0066]
进一步,所述双悬浮力无轴承异步电机的结构包括转子和定子,所述转子由转轴和转子铁芯组成,述转子铁芯沿周向均匀设置28个转子槽,转子槽内嵌入7对闭合转子导条;所述定子由定子铁芯和定子绕组组成,均匀设有36个定子槽,定子槽内嵌入2层绕组,内
侧为悬浮力绕组,外侧为转矩绕组,所述悬浮力绕组包括1对极的主控悬浮力绕组和3对极的辅助悬浮力绕组,两者交替分布,各占18个定子槽内侧。
[0067]
进一步,将中心对称且相邻夹角呈90
°
的4个转子槽划为一组,共划为7组,每组转子槽内沿轴向嵌入4根转子导条,转子导条包括轴向段和径向段,所述轴向段嵌入转子槽内部沿轴向布置,所述径向段用于连接轴向段的末端。具体地,在转子铁芯的一端面,利用2根径向段将该端的轴向段连接,且2根径向段相互平行;在转子铁芯的另一端面,利用另外2根径向段将另一端的轴向段连接,且2根径向段相互平行,进而实现这一组转子导条间形成闭合回路。
[0068]
有益效果
[0069]
本技术所提出的双悬浮力无轴承异步电机的矢量控制方法针对一种双悬浮力无轴承异步电机,实现主控悬浮力、辅助悬浮力以及转矩的独立控制。控制方法简单,解耦变量少、操作容易,能有效提高电机的悬浮力控制精度。
附图说明
[0070]
图1是双悬浮力无轴承异步电机基于转子磁场定向的解耦算法。
[0071]
图2是本发明的电机结构示意图。
[0072]
图3是本发明的转子槽1、4、8、11、15、18、22、25内导条连接方式。
具体实施方式
[0073]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
[0074]
如图2和3所示的一种双悬浮力无轴承异步电机,沿径向由内往外依次为电机转轴29、转子铁芯30和定子铁芯31。
[0075]
转子铁芯30套在电机转轴29上,工作时与电机转轴29同步旋转。转子铁芯30由型号为dw465
‑
50的硅钢片叠压而成,沿周向均匀设有28个转子槽,转子槽沿转子铁芯30的轴向布置;为了叙述方便将28个转子槽分别用1~28表示。
[0076]
沿顺时针方向,将中心对称且相邻夹角呈90
°
的4个转子槽划为一组,共划为7组,每组转子槽内沿轴向嵌入4根转子导条,转子导条由铝合金制成。转子导条包括轴向段和径向段,所述轴向段嵌入转子槽内部沿轴向布置,所述径向段用于连接轴向段的末端。具体地,在转子铁芯30的一端面,利用2根径向段将该端的轴向段连接,且2根径向段相互平行;在转子铁芯30的另一端面,利用另外2根径向段将另一端的轴向段连接,且2根径向段相互平行,进而实现这一组转子导条间形成闭合回路。
[0077]
定子铁芯31是由型号为dw465
‑
50的硅钢片叠压而成,沿定子铁芯31的周向均匀设有36个定子槽。沿径向将定子槽划为内外两层,靠近定子铁芯31的为内层;内层设有悬浮力绕组,外层设有转矩绕组34。
[0078]
悬浮力绕组包括1套1对极的主控悬浮力绕组32和1套3对极的辅助悬浮力绕组33,主控悬浮力绕组32和辅助悬浮力绕组33依次间隔、交替嵌于定子槽内侧,各占18个定子槽。
[0079]
转矩绕组34为1套2对极绕组,占满36个定子槽。
[0080]
主控悬浮力绕组32、辅助悬浮力绕组33和转矩绕组34均采用集中式分布,绕线由导电良好的电磁线圈绕制后侵漆烘干而成。
[0081]
旋转原理是:给转矩绕组34通入额定电流,定子外侧产生2对极旋转磁场。转子槽内的轴向导条相对切割所述旋转磁场,同时在闭合转子导条内产生感应电流,转子感应电流在旋转磁场中产生洛伦兹力,进而产生作用于转子导条的电磁转矩,带动电机转子旋转。
[0082]
悬浮原理是:给主控悬浮力绕组32通入电流,定子内侧产生1对极旋转磁场,与外侧的2对极磁场满足极对数相差1的关系,两者相互作用,产生麦克斯韦不平衡磁拉力,根据向量的点乘叉乘原则将主控悬浮力绕组电流分解到d、q轴,通过改变d、q轴电流实现电机悬浮。给辅助悬浮力绕组33通入电流,定子内侧产生3对极旋转磁场,与外侧的2对极磁场满足极对数相差1的关系,两者相互作用,产生另一个麦克斯韦不平衡磁拉力,将辅助悬浮力绕组33电流分解到d、q轴,通过控制d、q轴电流进一步控制电机悬浮力,从而提高电机悬浮控制精度。由于主控悬浮力绕组与辅助悬浮力绕组不满足极对数相差1的关系,二者作用不会产生麦克斯韦磁拉力。三套绕组磁场解耦容易,其同步控制可以提供4个力,提高无轴承异步电机的悬浮精度。
[0083]
针对上述双悬浮力无轴承异步电机,如图1本技术还提出了一种双悬浮力无轴承异步电机矢量控制策略,包括如下步骤;
[0084]
s1、基于上述双悬浮力无轴承电机,建立其数学模型,包括磁链方程、电压方程以及悬浮力方程,具体过程如下:
[0085]
s1.1、构建双悬浮力无轴承异步电机在α、β坐标系下的两相磁链方程:
[0086][0087]
其中ψ
1sα
、ψ
2sα
、ψ
3sα
、ψ
1rα
分别为转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组磁链在α轴上的分量;ψ
1sβ
、ψ
2sβ
、ψ
3sβ
、ψ
1rβ
分别为转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组磁链在β轴上的分量;l
1s
、l
2s
、l
3s
、l
1r
分别为转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组的自感;m
1s2s
、m
1s3s
、m
1s1r
、m
2s3s
、m
2s1r
、m
3s1r
为转矩绕组和主控悬浮力绕组、转矩绕组和辅助悬浮力绕组、转矩绕组和转子绕组、主控悬浮力绕组和辅助悬浮力绕组、主控悬浮力绕组和转子绕组、辅助悬浮力绕组和转子绕组之间的互感。i
1sα
、i
2sα
、i
3sα
和i
1rα
分别是转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组电流在α轴上的分量;i
1sβ
、i
2sβ
、i
3sβ
和i
1rβ
分别是转矩绕组、主控悬浮力绕组、辅助悬浮力绕组和转子绕组电流在β轴上的分量。
[0088]
s1.2、根据s1.1并以转子磁链、转矩绕组电流、主控悬浮力绕组电流以及辅助悬浮力绕组电流作为自变量,反解出双悬浮力无轴承异步电机转子电流在α、β轴上的分量:
[0089][0090]
s1.3、根据s1.2进一步化简s1.1中双悬浮力无轴承异步电机的定子磁链方程:
[0091][0092][0093][0094]
s1.4、根据s1.2构建双悬浮力无轴承异步电机在α、β轴上的转子电压方程:
[0095][0096]
其中,u
rα
、u
rβ
为转子电压在α、β轴上的分量;r
1r
是转子电阻;ω
r
是转子角频率;t为时间变量;p为微分算子;i
rα
、i
rβ
分别是转子电流在α、β轴上的分量。
[0097]
s1.5、根据s1.4进一步构建双悬浮力无轴承异步电机在d、q轴上的转子电压方程:
[0098][0099]
其中,u
rd
、u
rq
为转子电压在d、q轴上的分量;ψ
1rd
、ψ
1rq
为转子磁链在d、q轴上的分量;i
1sd
、i
2sd
、i
3sd
为转矩绕组、主控悬浮力绕组以及辅助悬浮力绕组电流在d、q轴上的分量;ω为转矩绕组电角频率。
[0100]
s1.6、构建双悬浮力无轴承异步电机的悬浮力方程:
[0101]
代入p1=2,p2=1,p3=3化简得:
[0102]
式中,f
2m
和f
3m
分别为主控悬浮力方程和辅助悬浮力方程;ψ1为转矩绕组气隙磁链;和分别为主控悬浮力定子电流和辅助悬浮力定子电流;μ0为真空磁导率;l为电机转子有效铁心长度;r为转子半径;w1和w2分别为转矩绕组和悬浮力绕组每相串联的有效匝数。
[0103]
s1.7、根据向量的点乘和叉乘原理,将无轴承异步电机主控悬浮力分解到d、q轴上:
[0104]
其中,f
2x
、f
2y
为主控悬浮力在x、y轴上的分量;i
2sd
和i
2sq
为主控悬浮力绕组电流在x、y轴上的分量;ψ
1d
和ψ
1q
为转矩绕组气隙磁链在x、y轴上的分量;k2为一常数,表示为常数p1=2,p2=1。
[0105]
s1.8、根据向量的点乘和叉乘原理,将无轴承异步电机辅助悬浮力分解到d、q轴上:
[0106][0107]
其中,f
3x
、f
3y
为辅助悬浮力在x、y轴上的分量,k3为一常数,表示为
[0108]
s2、对主控悬浮力方程的优化过程为:
[0109]
s2.1、构建bim电压平衡方程:
[0110]
其中,和为转矩绕组和主控悬浮力绕组的定子电压,和为其定子电流,z
1s
和z
2s
为其定子阻抗,和为其定子感应电动势,x
m
为其互漏抗,为转子感应电动势,为转子电流,z
r
为转子等效阻抗。第二项可进一步化为:k
w
为主控悬浮力绕组和转矩绕组匝数比;j为虚数符号;μ、λ分别为转矩绕组和主控悬浮力绕组的磁场初始相位角。
[0111]
s2.2、进一步将s2.1中的第二项改写为:
[0112]
式中,k
w
为主控悬浮力绕组和转矩绕组匝数比。
[0113]
s2.3、为使两套绕组的互漏感系数互逆,将悬浮力绕组电流变等效为由此得到:
[0114][0115]
其中,x'
m
=x
m
/k
w
,z'
s2
=z
s2
/k
2w
。
[0116]
s2.4、进一步,将转子绕组参数折算到定子绕组上,构建转子电压平衡方程:
[0117]
其中转子感应电势由转矩绕组和主控悬浮力绕组叠加产生,进一步将转子电流化简为:
[0118]
其中、和x
r
为转子静止时转矩绕组和主控悬浮力绕组的转子感应电动势和转子漏抗,s1和s2为转矩绕组和主控悬浮力绕组的转差率。r
r
为转子电阻。
[0119]
s2.5、根据s2.4推导出主控悬浮力绕组模块的等效电阻r
re
:
[0120]
取k
w
=1且λ=μ,进一步化为:
[0121]
s2.6、根据s2.5,同时将转矩绕组和主控悬浮力绕组线径、匝数、材料参数设为一致,进一步构建主控悬浮绕组励磁电流方程
[0122][0123]
其中,k
m
为励磁电流系数,表示为x
s
为转绕组和主控悬浮力绕组的定子漏抗,r
s
为定子电阻。
[0124]
s2.7、根据s2.6对双悬浮力无轴承异步电机的主控悬浮力方程进行优化,在传统数学公式后乘以励磁电流系数,得到:
[0125][0126]
其中,ψ1为定子磁链,i
2s
为主控悬浮力绕组电流;ψ
1d
、ψ
1q
为定子磁链在d、q轴上的分量。
[0127]
s3、对双悬浮力无轴承异步电机的矢量控制过程如下:
[0128]
s3.1、采用转子磁场定向矢量控制策略,令其中ψ
1r
为转子磁链,同时由于转子导条内部短路,有u
rd
=u
rq
=0,将其代入s2.1.5中的转子电压方程:
[0129][0130][0131]
s3.2、无轴承异步电机转矩绕组气隙磁链和转子磁链的关系:
[0132]
其中,l
1rσ
为转矩绕组的转子漏感,i
1sd
和i
1sq
为转矩绕组定子电流在d、q轴上的分量。
[0133]
s3.3、将s3.2中的转矩绕组气隙磁链和转子磁链带入s2.7中优化后的双悬浮力无轴承异步电机的主控悬浮力计算式中,构建基于转子磁场定向的主控悬浮力方程:
[0134][0135]
s3.3、将s3.2中的转矩绕组气隙磁链和转子磁链带入s1.6中的双悬浮力无轴承异步电机的辅助悬浮力计算式中,构建基于转子磁场定向的辅助悬浮力方程:
[0136][0137]
s3.4、进一步,构建无轴承异步电机的电磁转矩方程的过程为:将ψ
1rd
=ψ
1r
,ψ
1rq
=0代电机转矩方程t
e
中,得到:ψ
1r
为转子磁链。
[0138]
s4、如图1基于s2和s3中的双悬浮力无轴承异步电机转子磁链方程、优化后的悬浮力方程和电磁转矩方程进行转子磁场定向的解耦方法为:将给定电磁转矩te
*
、转子磁链ψ
1r*
、主控悬浮力在x、y轴上的分量f
2x*
、f
2y*
、辅助悬浮力在x、y轴上的分量f
3x*
、f
3y*
作为输入,根据式电机电磁转矩方程计算出i
1sq
、根据转子磁链方程计算出i
1sd
、根据主控悬浮力方程计算出i
2sd
和i
2sq
、根据辅助悬浮力公式计算出i
3sd
和i
3sq
。
[0139]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1