编码器及电动机的制作方法
1.本发明涉及一种编码器及电动机。
背景技术:
2.在筒状的电动机壳体中容纳定子及转子的电动机中,使用一种带编码器的电动机,其将编码器壳体固定在电动机壳体的输出相反侧的端部,将检测转子的旋转的编码器容纳在编码器壳体的内部。在专利文献1、2中公开了这种电动机。
3.专利文献1、2的电动机具备相对于定子配置于输出相反侧的电磁制动器。在专利文献1的电动机中,电磁制动器具备:固定于旋转轴(电动机轴)的摩擦板;被弹簧按压于摩擦板的电枢;以及产生朝向与弹簧的作用力相反的方向吸引电枢的磁吸引力的制动器用定子。
4.带制动器的电动机的检测转子的旋转的编码器有可能受到从电磁制动器产生的漏磁通的影响。专利文献1的电动机将由磁性部件构成的间隔板配置在制动器壳体的输出相反侧的端部,以吸收从制动器朝向编码器侧的漏磁通。另外,在间隔板的内周面和旋转轴的外周面上形成台阶部而设为迷宫结构,保持编码器的基板的基板保持架也设为磁性部件,由此,进一步减小漏磁通。
5.另外,专利文献2的电动机预先以存在从电磁制动器产生的漏磁通为前提修正编码器的输出,以排除漏磁通的影响,由此,抑制由漏磁通的影响引起的编码器的检测精度的降低。
6.现有技术文献
7.专利文献
8.专利文献1:日本特许第5943694号公报
9.专利文献2:日本特开平9-243398号公报
技术实现要素:
10.发明所要解决的技术问题
11.由于编码器的分辨率的提高,即使在进行如专利文献1那样的对策的情况下,漏磁通对检测精度的影响也可能达到成为问题的水平。为了进一步减小漏磁通,还进行了通过将旋转轴的输出相反侧和输出侧设为不同的材质来抑制磁通量经由旋转轴泄漏到编码器侧的对策,但存在零件成本变高的问题。
12.另外,有时用户不在符合制动器规格的电压下使用带电磁制动器的电动机。例如,有时以电磁制动器的发热减少或耗电量减少为目的,在比规格电压低的电压下使用。此外,由于电磁制动器即使将极性接反也进行动作,因此有时以错误的极性连接并原样使用。在像专利文献2那样通过修正来消除从电磁制动器产生的漏磁通的影响的情况下,尽管在用户以符合制动器规格的电压及极性使用的情况下可以通过修正来消除漏磁通引起的检测角度的误差,但是在用户以与制动器规格不同的电压使用的情况下,修正量与漏磁通引起
的检测角度的误差不一致,无法按目标消除漏磁通的影响。另外,在用户以与制动器规格相反的极性使用的情况下,有时成为检测角度的误差通过修正反而大幅度地增大的过度调节。
13.鉴于以上问题,本发明的课题在于,以廉价的结构,即使在不按规格使用电磁制动器的情况下也抑制编码器的检测精度的降低。
14.解决技术问题所采用的技术方案
15.为了解决上述课题,本发明提供一种编码器,其检测带制动器的电动机的旋转,所述带制动器的电动机具备:转子,所述转子具备旋转轴;定子,所述定子在径向上与所述转子对置;以及电磁制动器,所述电磁制动器相对于所述定子配置于所述旋转轴的轴线方向的一侧,所述编码器的特征在于,具有:磁铁保持架,所述磁铁保持架固定于所述旋转轴的所述轴线方向的一侧的端部;磁铁,所述磁铁保持于所述磁铁保持架;磁传感器及传感器基板,所述磁传感器从所述轴线方向的一侧与所述磁铁对置,所述传感器基板配置有所述磁传感器;以及修正部,所述修正部修正根据所述磁传感器的输出求得的检测角度,所述磁铁保持架具备围绕所述磁铁的外周侧的周壁,并且在所述旋转轴的前端面和所述磁铁之间设置有规定间隙的位置保持有所述磁铁,所述周壁具备设置在所述轴线方向的一侧的前端的环状突部和设置在所述环状突部的内周侧的第一环状台阶部,在所述第一环状台阶部的内周侧设置有供所述磁铁嵌入的第二环状台阶部,所述修正部进行消除由于以比所述电磁制动器的规格电压即第一电压低的第二电压对所述电磁制动器通电时产生的制动器磁场的影响引起的检测误差的修正。
16.根据本发明,因为编码器的磁铁和旋转轴未相接,所以从旋转轴的端部发出的漏磁通不易直接干扰磁铁,不易扰乱磁铁的磁场。因此,由于可以使磁铁的磁通量稳定化,所以能够抑制来自电磁制动器的漏磁通引起的编码器的检测精度的降低。
17.另外,根据本发明,因为第一环状台阶部被设置于磁铁保持架的周壁的前端,且磁铁嵌入到设置于第一环状台阶部的内周侧的第二环状台阶部,所以在磁铁保持架的周壁和磁铁之间确保了间隙。供电磁制动器的漏磁通通过的磁路包括旋转轴及磁铁保持架而构成,但在本发明中,因为在磁铁保持架的磁传感器侧的端部和磁铁之间确保了间隙,所以来自电磁制动器的漏磁通不易直接干扰磁铁,不易扰乱磁铁的磁场。因此,由于可以使磁传感器检测的磁通量稳定化,所以能够抑制来自电磁制动器的漏磁通引起的编码器的检测精度的降低。
18.此外,根据本发明,以即使进行如上所述的结构上的对策,来自电磁制动器的漏磁通也会影响磁传感器的输出为前提,对编码器的检测角度进行消除电磁制动器以比规格电压低的电压通电时所产生的制动器磁场的影响引起的检测误差的修正。这样,在用户以低于规格电压的电压使用电磁制动器时,或者也包括使极性反转而使用电磁制动器的情况在内,均可以降低漏磁通对编码器的检测精度的影响,编码器的检测精度不易大幅降低。另外,能够抑制检测误差通过修正反而增大的过度调节。因此,不使用高成本的零件,也包括不按规格使用电磁制动器的情况在内,均能够抑制来自电磁制动器的漏磁通引起的编码器的检测精度的降低。
19.在本发明中,优选的是,在所述旋转轴的前端面和所述磁铁之间设置有0.5mm以上的气隙。通过设置气隙,可以使制动器的漏磁通从旋转轴向磁铁传递的路径具有磁阻,且能
够使朝向磁铁的泄漏持续衰减。因此,能够减少来自制动器的漏磁通引起的磁铁的磁通量的紊乱。
20.在本发明中,优选的是,所述第二电压是所述第一电压的75%的电压。这样,当电磁制动器能够在规格电压的50%的电压下使用时,即使在规格电压和规格电压的50%的电压之间的任一电压下使用的情况下,也可以通过修正来减小检测误差,漏磁通对编码器的检测精度的影响不易增大。另外,根据本发明人等的验证,在电磁制动器以相反的极性连接的情况下,也可以通过修正来减小检测误差,漏磁通对编码器的检测精度的影响不易增大。因此,编码器的检测精度不易大幅度地降低。
21.在本发明中,优选的是,所述环状突部比所述磁铁的所述轴线方向的一侧的表面更向所述轴线方向的一侧突出。这样,来自制动器的漏磁通相较于磁铁容易集中于周壁的前端。因此,能够减小来自电磁制动器的漏磁通对磁铁的磁通量的影响。
22.在本发明中,优选的是,所述环状突部和所述磁铁的间隙是容纳有固定所述磁铁的粘接剂的粘接剂积存腔。这样,利用用于减小来自电磁制动器的漏磁通的影响的结构,能够提高磁铁的固定强度。
23.在本发明中,优选的是,所述磁铁保持架是磁性材料。这样,因为磁铁保持架作为相对于磁铁的轭发挥作用,所以能够使由磁传感器检测的传感器磁通量稳定化。
24.其次,本发明提供一种带制动器的电动机,其特征在于,具备:转子,所述转子具备旋转轴;定子,所述定子在径向上与所述转子对置;电磁制动器,所述电磁制动器相对于所述定子配置于所述旋转轴的轴线方向的一侧;以及上述的编码器。
25.发明效果
26.根据本发明,从旋转轴的端部发出的漏磁通不易直接干扰磁铁,不易扰乱磁铁的磁场。另外,根据本发明,因为在磁铁保持架的磁传感器侧的端部和磁铁之间确保了间隙,所以来自电磁制动器的漏磁通不易直接干扰磁铁,不易扰乱磁铁的磁场。因此,由于能够使磁传感器检测的磁通量稳定化,所以能够抑制来自电磁制动器的漏磁通引起的编码器的检测精度的降低。
27.此外,根据本发明,以即使进行如上所述的结构上的对策,来自电磁制动器的漏磁通也会影响磁传感器的输出为前提,对编码器的检测角度进行消除电磁制动器以低于规格电压的电压通电时产生的制动器磁场的影响引起的检测误差的修正。这样,在各种使用方式中,编码器的检测精度不易大幅度地降低。另外,能够抑制检测误差通过修正反而增大的过度调节。因此,不使用高成本的零件,也包括不按规格使用电磁制动器的情况在内,均能够抑制来自电磁制动器的漏磁通引起的编码器的检测精度的降低。
附图说明
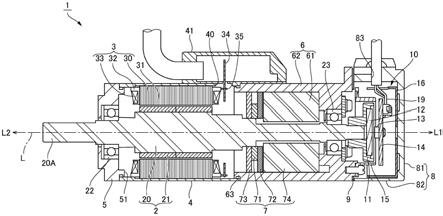
28.图1是具备本发明的编码器的电动机的剖视图。
29.图2是编码器的主要部分的放大剖视图。
30.图3是磁铁及磁铁保持架的俯视图以及传感器基板的俯视图。
31.图4是示意性地表示编码器的信号处理电路的框图。
32.图5是表示来自电磁制动器的漏磁通对编码器的检测误差的影响的图表。
33.附图标记说明
[0034]1…
电动机;2
…
转子;3
…
定子;4
…
电动机壳体;5
…
保持架;6
…
制动器壳体;7
…
电磁制动器;8
…
编码器壳体;9
…
密封材料;10
…
编码器;11
…
磁铁保持架;12
…
磁铁;12a
…
磁铁的轴线方向的一侧的表面;13
…
磁传感器;14
…
传感器基板;15
…
基板保持架;16
…
屏蔽部件;17
…
编码器电路;18
…
修正部;19
…
编码器配线;20
…
旋转轴;20a
…
输出轴;21
…
转子磁铁;22
…
第一轴承;23
…
第二轴承;24
…
前端面;30
…
定子铁芯;31
…
突极;32
…
绝缘体;33
…
线圈;34
…
配线基板;35
…
端子销;40
…
缺口部;41
…
引线保持架;51
…
环状肋;61
…
底部;62
…
侧壁部;63
…
小径部;71
…
摩擦板;72
…
电枢;73
…
板;74
…
制动器用定子;81
…
底部;82
…
侧壁部;83
…
编码器配线取出部;110
…
保持部;111
…
底部;112
…
周壁;113
…
环状突部;114
…
第一环状台阶部;115
…
第二环状台阶部;120
…
固定部;130
…
中心孔;131
…
磁敏元件;132
…
霍尔元件;g
…
气隙;l
…
轴线方向;l1
…
轴线方向的一侧;l2
…
轴线方向的另一侧。
具体实施方式
[0035]
(整体结构)
[0036]
下面,参照附图对应用了本发明的电动机的实施方式进行说明。图1是具备本发明的编码器10的电动机1的剖视图。电动机1是带制动器的电动机。如图1所示,电动机1具备:具备旋转轴20的转子2;配置于转子2的外周侧的定子3;容纳定子3的筒状的电动机壳体4;固定于电动机壳体4的一端的轴承保持架5;固定于电动机壳体4的另一端的制动器壳体6;容纳于制动器壳体6的电磁制动器7;以及检测转子2的旋转的编码器10。编码器10容纳于编码器壳体8。
[0037]
旋转轴20在电动机1的径向的中心向轴线方向l延伸。在本说明书中,将轴线方向l的一侧设为l1,将轴线方向l的另一侧设为l2。轴承保持架5固定于电动机壳体4的轴线方向l的另一侧l2的端部。旋转轴20具备从轴承保持架5向轴线方向l的另一侧l2突出的输出轴20a。因此,在本方式中,轴线方向l的另一侧l2是输出侧,轴线方向l的一侧l1是输出相反侧。
[0038]
转子2具备旋转轴20和固定于旋转轴20的外周面的转子磁铁21。旋转轴20由磁性材料构成。旋转轴20被第一轴承22及第二轴承23保持为能够旋转,第一轴承22被形成在轴承保持架5的中央的凹部保持,第二轴承23被制动器壳体6保持。在本方式中,第一轴承22及第二轴承23是滚珠轴承。
[0039]
电动机壳体4由铝等金属构成。定子3具备:定子铁芯30,该定子铁芯30由层叠铁芯构成;以及线圈33,该线圈33经由绝缘体32卷绕于设置在定子铁芯30上的多个突极31中的各突极。定子铁芯30通过热套或者压入而固定于电动机壳体4的内侧。在定子3的一侧l1配置有环状的配线基板34。配线基板34经由从绝缘体32突出的端子销35与线圈33电连接。
[0040]
在电动机壳体4的侧面固定有引线保持架41,该引线保持架41覆盖形成在电动机壳体4上的缺口部40。向线圈33供电用的引线(未图示)穿绕到引线保持架41的内部,从缺口部40引入到电动机壳体4的内侧并与配线基板34连接。与配线基板34连接的引线包括向电磁制动器7供电用的引线。
[0041]
电动机1是ac伺服电动机,定子3具备三相线圈33。在本方式中,配置有线圈33的槽数为12。另外,转子磁铁21是在外周面沿周向交替地磁化出n极和s极的8极磁化磁铁。即,本
方式的电动机1为8极12槽。此外,电动机1的极数及槽数也可以与上述不同。
[0042]
制动器壳体6由铝等金属构成。制动器壳体6具备:在中央形成有保持第二轴承23的凹部的厚壁状的底部61;以及从底部61的外周缘向轴线方向l的另一侧l2延伸的侧壁部62。在侧壁部62的前端形成有嵌入电动机壳体4的内周侧的小径部63。另外,在轴承保持架5的轴线方向l的一侧l1的表面形成有嵌入电动机壳体4的内周侧的环状肋51。当将轴承保持架5及制动器壳体6组装到电动机壳体4的两端时,小径部63及环状肋51和电动机壳体4之间的间隙被未图示的密封材料密封。
[0043]
电磁制动器7具备:与旋转轴20一体地旋转的摩擦板71;从轴线方向l的一侧l1与摩擦板71对置的电枢72;将电枢72朝向摩擦板71施力的扭力弹簧(未图示);从轴线方向l的另一侧l2与摩擦板71对置的板73;以及相对于电枢72配置于轴线方向l的一侧l1的制动器用定子74。制动器用定子74固定于制动器壳体6。
[0044]
电磁制动器7在不对制动器用定子74的线圈通电的状态下,电枢72被扭力弹簧按压到摩擦板71上,对旋转轴20施加旋转负荷。因此,产生制动力。另外,在对制动器用定子74的线圈通电的状态下,由于电枢72克服扭力弹簧的作用力而被吸引至制动器用定子74,因此在电枢72和摩擦板71之间产生间隙。因此,不再对旋转轴20施加摩擦引起的旋转负荷,所以制动力被解除。
[0045]
编码器壳体8由非磁性树脂构成。编码器壳体8具备:沿轴线方向l与制动器壳体6的底部61对置的底部81;以及从底部81的外周缘朝向底部61向另一侧l2立起的侧壁部82。侧壁部82的前端和底部61之间的间隙被密封材料9密封。在侧壁部82设置有用于将与编码器10连接的编码器配线19引出到外部的编码器配线取出部83。
[0046]
(编码器)
[0047]
编码器10是磁编码器。编码器10具备:经由磁铁保持架11固定于旋转轴20的磁铁12;以及从轴线方向l的一侧l1与磁铁12对置的磁传感器13。磁铁保持架11由磁性材料构成。磁铁12在与磁传感器13对置的磁化面各磁化有一极n极和一极s极。
[0048]
配置磁传感器13的传感器基板14经由基板保持架15固定于制动器壳体6的底部61。基板保持架15由树脂等绝缘材料形成。磁铁12及传感器基板14的外周侧及一侧l1被固定于编码器壳体8的内侧的杯状的屏蔽部件16包围。屏蔽部件16由磁性金属构成。
[0049]
图2是编码器10的主要部分的放大剖视图。图3的(a)是磁铁12及磁铁保持架11的俯视图,是从轴线方向l的一侧l1观察的图。图3的(b)是传感器基板14的俯视图,是从轴线方向l的另一侧l2观察的图。如图2、图3的(a)所示,磁铁保持架11具备:从轴线方向l观察时为圆形的保持部110;以及从保持部110的中心向轴线方向l的另一侧l2突出的筒状的固定部120。旋转轴20的一侧l1的端部嵌入到贯通保持部110及固定部120的径向的中心的中心孔130中。
[0050]
如图3的(b)所示,磁传感器13具备:配置于传感器基板14的中央的磁敏元件131;以及配置于磁敏元件131的附近的两个霍尔元件132。两个霍尔元件132配置于分开90度的角度位置。
[0051]
保持部110具备圆形的底部111和从底部111的外周缘向轴线方向l的一侧l1突出的周壁112。在周壁112的前端设置有向一侧l1突出的环状突部113,在环状突部113的内周侧设置有向另一侧l2凹陷的第一环状台阶部114。磁铁12与设置于第一环状台阶部114的内
周侧的第二环状台阶部115嵌合。如图2所示,在旋转轴20的一侧l1的前端面24和磁铁12之间设置有规定尺寸的气隙g。
[0052]
在本方式中,当装配编码器10时,使用夹具将磁铁保持架11定位到旋转轴20的前端。此时,相对于旋转轴20对磁铁保持架11进行定位,以使旋转轴20的前端面24和磁铁12之间的气隙g为0.5mm以上,优选为0.6mm以上且1.0mm以内的尺寸。由此,在磁铁12和旋转轴20的前端面24之间确保了气隙g。
[0053]
在本方式中,在磁铁保持架11的周壁112上设置有两级台阶部,磁铁12嵌入作为内周侧的台阶部的第二环状台阶部115,所以磁铁12沿径向远离环状突部113。磁铁12通过粘接剂固定于磁铁保持架11,第一环状台阶部114被用作配置用于固定磁铁12的粘接剂(未图示)的粘接剂积存腔。因此,确保了磁铁12的固定强度。
[0054]
如图2所示,在本方式中,环状突部113的前端比磁铁12的轴线方向l的一侧l1的表面12a更向一侧l1突出。在由电磁制动器7产生的磁通量通过旋转轴20及磁铁保持架11而成为漏磁通时,围绕磁铁12的周壁112成为磁路,漏磁通从环状突部113向磁铁保持架11的外部漏出并朝向磁传感器侧,但在本方式中,由于在周壁112上设置有第一环状台阶部114,因此环状突部113沿径向远离磁铁12。另外,环状突部113的前端位于比磁铁12的表面12a靠轴线方向l的一侧l1的位置。因此,以漏磁通从远离磁铁12的位置漏出的方式构成磁路,所以漏磁通对磁铁12的磁场造成的影响小。
[0055]
就编码器10而言,磁铁12随着旋转轴20的旋转而旋转,根据磁传感器13的输出来检测磁铁12的旋转引起的磁场的变化。编码器10作为绝对编码器发挥作用,所述绝对编码器根据两个霍尔元件132的输出判别在旋转一圈中获得的磁敏元件131的输出的周期,由此,检测转子2的旋转位置。
[0056]
(编码器的角度修正)
[0057]
图4是示意性地表示编码器10的信号处理电路的框图。编码器10具备输入磁传感器13的输出的编码器电路17。编码器电路17由配置于传感器基板14的电路元件及配线图案构成。编码器电路17具备修正根据磁传感器13的输出求得的检测角度的修正部18。由修正部18修正的检测角度经由与传感器基板14上的连接器连接的编码器配线19向外部输出。
[0058]
修正部18以存在从电磁制动器7产生的漏磁通为前提,进行修正检测角度的处理,以消除漏磁通。在本方式中,修正部18进行消除以低于作为电磁制动器7的规格电压的第一电压的第二电压驱动电磁制动器7时产生的制动器磁场的影响的修正。在此,第二电压是电磁制动器7的规格电压的75%的电压。例如,在电磁制动器7的第一电压为24v的情况下,第二电压是第一电压的75%的电压,为18v。
[0059]
图5是表示来自电磁制动器7的漏磁通对编码器10的检测误差的影响的图表。图5的横轴是转子2的旋转位置。纵轴是检测误差,用编码器脉冲的计数值表示。图5的数据是在第一电压(规格电压)为24v的情况下以下面的六种方式驱动电磁制动器7时获得的检测误差的数据。
[0060]
(1)驱动电压24v,常规连接
[0061]
(2)驱动电压18v,常规连接
[0062]
(3)驱动电压12v,常规连接
[0063]
(4)驱动电压24v,反向连接
[0064]
(5)驱动电压18v,反向连接
[0065]
(6)驱动电压12v,反向连接
[0066]
反向连接是将供电配线以极性反转方式连接到电磁制动器7的状态。如图5所示,在反向连接的情况下,检测误差因转子2的旋转位置不同而大幅度地变动。另一方面,在常规连接中,检测误差的变动小,检测误差的绝对值也比反向连接的情况小。另外,在常规连接和反向连接中的任一连接情况下,随着电磁制动器7的驱动电压减小,来自电磁制动器7的漏磁通引起的检测误差的绝对值减小。
[0067]
修正部18存储在各旋转位置产生的检测误差的数据,对从编码器电路17输出的检测角度进行消除检测误差的修正。此时,将以第二电压(18v)驱动电磁制动器7时的检测误差的数据用作修正值,而不是以第一电压(24v)驱动电磁制动器7时的检测误差的数据。这样,不仅在以规格电压(24v)驱动电磁制动器7的情况下,在以与规格电压不同的电压(18v、12v)进行驱动的情况下,也能够减小检测误差。
[0068]
即,在本方式中,在以上述(2)的方式驱动电磁制动器7的情况下,按照与产生的检测误差一致的修正值进行修正,因此可以使检测误差最小。接下来,在以上述(1)的方式驱动电磁制动器7的情况下,产生的检测误差大于修正值。因此,虽然检测误差的一部分不能去除,但能够减小检测误差。另外,在以上述(3)的方式驱动电磁制动器7的情况下,产生的检测误差小于修正值。因此,虽然残余正负相反的检测误差,但能够减小检测误差的绝对值。
[0069]
接下来,在以上述(4)~(6)的方式驱动电磁制动器7的情况下,除了产生的检测误差和修正值的正负相反的范围,能够减小检测误差。根据图5的数据,在产生的检测误差和修正值的正负相反的范围内,成为检测误差通过修正反而增大的过度调节,但这样的范围较小。另外,因为将修正值设定得较小(即,将以比规格电压即24v低的18v驱动电磁制动器7时的检测误差用作修正值),所以可以减少过度调节。
[0070]
(本方式的主要效果)
[0071]
如上所述,本方式的电动机1是一种带制动器的电动机,其具备:具备旋转轴20的转子2;在径向上与转子2对置的定子3;以及相对于定子3配置于旋转轴20的轴线方向l的一侧l1的电磁制动器7,其中,具备检测转子2的旋转的编码器10。本方式的编码器10具有:固定于旋转轴20的轴线方向l的一侧l1的端部的磁铁保持架11;保持于磁铁保持架11的磁铁12;从轴线方向l的一侧l1与磁铁12对置的磁传感器13及配置有磁传感器13的传感器基板14;以及修正根据磁传感器13的输出求得的检测角度的修正部18。磁铁保持架11具备围绕磁铁12的外周侧的周壁112,并且在旋转轴20的前端面24和磁铁12之间设置有规定的间隙(在本方式中为气隙g)的位置保持有磁铁12。另外,周壁112具备设置于轴线方向l的一侧l1的前端的环状突部113和设置于环状突部113的内周侧的第一环状台阶部114,在第一环状台阶部114的内周侧设置有供磁铁12嵌入的第二环状台阶部115。此外,修正部18进行消除以比作为电磁制动器7的规格电压的第一电压低的第二电压对电磁制动器7通电时产生的制动器磁场的影响的修正。
[0072]
在本方式中,因为编码器10的磁铁12和旋转轴20未相接,所以从旋转轴20的端部发出的漏磁通不易直接干扰磁铁12,不易扰乱磁铁12的磁场。因此,由于能够使磁铁12的磁通稳定化,所以能够抑制来自电磁制动器7的漏磁通引起的编码器10的检测精度的降低。
[0073]
另外,在本方式中,因为在磁铁保持架11的周壁112的前端设置有第一环状台阶部114,且在设置于第一环状台阶部114的内周侧的第二环状台阶部115配置有磁铁12,所以在磁铁保持架11和磁铁12之间确保了径向的间隙,在供来自电磁制动器7的漏磁通通过的磁路和磁铁12之间确保了间隙。因此,漏磁通不易直接干扰磁铁12,不易扰乱磁铁12的磁场。由此,能够抑制来自电磁制动器7的漏磁通引起的编码器10的检测精度的降低。
[0074]
而且,在本方式中,以即使进行如上所述的结构上的对策,来自电磁制动器7的漏磁通也影响磁传感器13的输出为前提,对编码器10的检测角度进行消除因以比规格电压(第一电压)低的第二电压驱动电磁制动器7时产生的制动器磁场的影响引起的检测误差的修正。由此,在进行比规格电压低的电压下的使用或使极性反转的使用的情况下,也能够减小漏磁通对编码器10的检测精度的影响。另外,能够抑制检测误差通过修正反而增大的过度调节。因此,不使用高成本的零件,也包括不按规格使用电磁制动器7的情况在内,均能够抑制来自电磁制动器7的漏磁通引起的编码器10的检测精度的降低。
[0075]
在本方式中,在旋转轴20的前端面24和磁铁12之间设置有0.5mm以上的气隙g。通过设置气隙g,可以使来自电磁制动器7的漏磁通从旋转轴20向磁铁12传递的路径具有磁阻,能够使朝向磁铁12的泄漏持续衰减。因此,可以减少来自电磁制动器7的漏磁通引起的磁铁12的磁通量的紊乱。此外,旋转轴20的前端面24和磁铁12的间隙也可以不是气隙g,也可以填充非磁性粘接剂。
[0076]
在本方式中,第二电压是第一电压的75%的电压。如果这样设定修正值,则即使在以与规格电压不同的电压使用电磁制动器7的情况下,漏磁通对编码器10的检测精度的影响也不易增大,可以减小检测误差。例如,能够解除制动的最低电压根据制动器不同而不同,但在存在用户将电磁制动器7的电压下降到规格电压的50%而使用的可能性的情况下,通过将规格电压和规格电压的50%的电压的中间的电压设定为第二电压,即使在以规格电压和规格电压的50%的电压之间的任一电压使用的情况下,也可以最大限度地减小编码器10的检测误差。另外,在电磁制动器7以相反极性连接的情况下,通过使用这样的修正值,漏磁通对编码器10的检测精度的影响也不易变大。因此,编码器10的检测精度不易大幅度地降低。
[0077]
在本方式中,环状突部113比磁铁12的轴线方向l的一侧l1的表面12a更向轴线方向l的一侧l1突出。环状突部113构成供电磁制动器7的磁通通过的磁路,所以如果环状突部113的前端远离磁铁12,则漏磁通量从远离磁铁12的位置向外部漏出。因此,由于漏磁通对磁铁12的磁场造成的影响小,所以能够抑制来自电磁制动器7的漏磁通引起的编码器10的检测精度的降低。
[0078]
在本方式中,环状突部113和磁铁12之间的间隙是容纳固定磁铁12的粘接剂的粘接剂积存腔。因此,使用用于减小来自电磁制动器7的漏磁通的影响的结构,能够提高磁铁12的固定强度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1