交流-交流转换器的制作方法
1.本发明涉及一种ac-ac转换器。
背景技术:
2.三相马达被广泛地用于风扇、泵、fa设备等产业设备。用于驱动这样的三相马达的马达驱动系统通常包括ac-ac转换器,该ac-ac转换器由将三相ac电压进行整流来生成dc电压(整流电压)的整流电路、该整流电路的后级的dc环节以及根据dc环节电压来生成三相ac电压的逆变器电路构成。
3.现有技术文献
4.非专利文献
5.非专利文献1:m.guacci,d.bortis,and j.w.kolar,“high-eciency weight-optimized fault-tolerant modular multi-cell three-phase gan inverter for next generation aerospace applications,”in proc.of ieee energy conversion congress and exposition(ecce-usa),portland,or,usa,sept.2018,pp.1334-1341.
技术实现要素:
6.发明要解决的问题
7.在马达驱动系统中,以能够使用低耐压的元件、能够减少设计工时以及能够共用部件等为目的,要求能够使系统整体小型化、高密度化。作为用于实现其的技术之一,提出了一种将逆变器电路模块化以使用按三相绕组的每个段分别独立的模块马达来构成马达并且按每个模块驱动各段而得到的“模块马达驱动系统(mmd:modular motor drive)”(例如参照非专利文献1)。然而,在此类型的mmd中,虽然逆变器电路被模块化,但是整流电路未被模块化。在该情况下,由于在整流电路中需要高耐压的半导体元件,因此马达驱动系统整体难以小型化、高密度化。并且,在该mmd中,未考虑整流电路的容错,存在在整流电路发生了故障的情况下无法驱动马达这样的问题。
8.这样,在以往的整流电路中除了存在无法将马达驱动系统充分小型化、高密度化这样的问题之外还存在无法实现整流电路发生了故障的情况下的容错这样的问题。本发明是鉴于这样的问题而完成的,其目的在于实现一种可容错的马达驱动系统。
9.用于解决问题的方案
10.为了解决上述问题,本发明的某个方式的ac-ac转换器具备:3的倍数个单相整流电路模块,所述单相整流电路模块将从三相ac电源供给的三相ac输入电压的各相的ac电压转换为dc电压,所述3的倍数个单相整流电路模块的各单相整流电路模块使用三角形接法或星形接法来相互连接;与所述单相整流电路模块相同数量的逆变器电路模块,所述逆变器电路模块将所述dc电压转换为三相ac输出电压;以及控制部,所述控制部控制构成所述单相整流电路模块及所述逆变器电路模块的开关元件,以在所述3的倍数个单相整流电路模块中的任一方发生了故障时,使其余的所述单相整流电路模块以及与该单相整流电路模
块连接的所述逆变器电路模块均等地输出三相ac输出功率。
11.也可以是,实施方式的ac-ac转换器还具备切换部,该切换部使单相整流电路模块在三角形接法与星形接法之间进行切换。
12.将三相电源的电源电压与dc环节电压的最大值之比设为r。也可以是,此时,在r小于规定的值时,切换部将单相整流电路模块切换为三角形接法,在r为规定的值以上时,切换部将单相整流电路模块切换为星形接法。
13.也可以是,r的值处于的范围内。
14.也可以是,r的值为
15.也可以是,控制部控制构成单相整流电路模块及逆变器电路模块的开关元件,以使dc电压为固定、并且使从三相ac电源输入的三相输入电流的相位与三相ac输入电压的相位一致。
16.也可以是,控制部基于在单相整流电路模块的后级设置的dc环节的dc环节电压与目标环节电压之差来计算目标电容器功率,通过从目标dc功率中减去目标电容器功率来计算用于向外部的马达输出功率的目标马达功率,基于目标电容器功率及目标马达功率来控制构成单相整流电路模块及逆变器电路模块的开关元件,以使得使用外部的马达的负载来吸收与三相ac输入电压有关的三相ac功率的脉动以及与dc电压有关的dc功率的脉动。
17.也可以是,dc环节具备电容。此时,该电容也可以用于吸收与三相ac输入电压有关的三相ac功率的脉动以及与dc电压有关的dc功率的脉动。
18.也可以是,控制部控制构成单相整流电路模块及逆变器电路模块的开关元件,以使来自三相ac电源的输入功率均等地分配到全部的单相整流电路模块。
19.也可以是,控制部控制构成单相整流电路模块及逆变器电路模块的开关元件,以使来自三相ac电源的输入功率以不同的比率分配到单相整流电路模块。
20.也可以是,控制部计算三相ac电源的各相的电源电压,并且控制构成单相整流电路模块及逆变器电路模块的开关元件,以使被分配到与电源电压高的相相当的单相整流电路模块的功率量比被分配到与电源电压低的相相当的单相整流电路模块的功率量更大。
21.此外,以上的结构要素的任意组合、或者将本发明的结构要素、形式在方法、装置、程序、记录了程序的临时或非临时的存储介质、系统等之间相互置换而得到的方式作为本发明的方式也是有效的。
22.发明的效果
23.根据本发明,能够实现可容错的、小型化、高密度化后的马达驱动系统。
附图说明
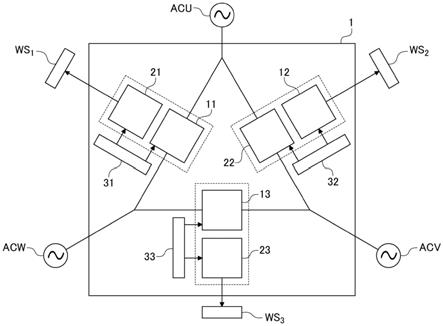
24.图1是第一实施方式所涉及的三角形接法的ac-ac转换器的功能框图。
25.图2是第一实施方式所涉及的星形接法的ac-ac转换器的功能框图。
26.图3是示出在图1的ac-ac转换器中、单相整流电路模块中的一个发生了故障时的状态的图。
27.图4是示出在图2的ac-ac转换器中、单相整流电路模块中的一个发生了故障时的状态的图。
28.图5是第二实施方式所涉及的三角形接法时的ac-ac转换器的功能框图。
29.图6是第二实施方式所涉及的星形接法时的ac-ac转换器的功能框图。
30.图7是整流电路输入电压、调制率以及整流电路输入电流相对于电源电压的曲线图。
31.图8是第四实施方式所涉及的ac-ac转换器中的控制部的功能框图。
具体实施方式
32.下面,基于优选的实施方式一边参照附图一边说明本发明。实施方式并不限定发明而是示例。实施方式中记述的所有特征、它们的组合未必是发明的本质特征。设为对各附图所示的相同或同等的结构要素、构件、处理标注相同的附图标记,并适当省略重复的说明。另外,关于各图所示的各部的比例尺、形状,被适当设定以便于说明,只要未特别提及则未被限定解释。另外,在本说明书或权利要求之中使用了“第一”、“第二”等用语的情况下,只要未特别提及,则该用语不表示任何顺序、重要度,仅用于区别某个结构与其它结构。另外,在各附图中,省略显示在说明实施方式上不重要的构件的一部分。
33.[第一实施方式]
[0034]
图1和图2是第一实施方式所涉及的ac-ac转换器1的功能框图。ac-ac转换器1具备单相整流电路模块11、12、13、逆变器电路模块21、22、23以及控制部31、32、33。即,用单相整流电路模块11、12、13模块化ac-ac转换器1的整流电路。另外,用逆变器电路模块21、22、23模块化ac-ac转换器1的逆变器电路。单相整流电路模块11、12、13例如分别是使用开关元件来构成的单相桥电路,分别具备2个输入端子和2个输出端子。逆变器电路模块21、22、23例如分别是使用开关元件来构成的三相桥电路,分别具备2个输入端子和3个输出端子。这样,在ac-ac转换器1中,整流电路和逆变器电路双方均被模块化,因此能够小型且高密度地构成马达驱动系统整体。
[0035]
单相整流电路模块11与商用电源等三相ac电源的u相的输出端子acu连接,用于将从输出端子acu供给的u相的单相ac电压vu转换为dc电压。单相整流电路模块12与上述的三相ac电源的v相的输出端子acv连接,用于将从输出端子acv供给的v相的单相ac电压vv转换为dc电压。单相整流电路模块13与上述的三相ac电源的w相的输出端子acw连接,用于将从输出端子acw供给的w相的单相ac电压vw转换为dc电压。单相整流电路模块11、12、13使用三角形接法(图1)或星形接法(图2)来相互连接。三角形接法(也称作δ接法)和星形接法(也称作y接法)是在三相交流电路的方面广泛知晓的接线方法。即,三角形接法是将u相、v相、w相的各相按施加相电压的方向连接且设为闭合电路的接法。在三角形接法中,线间电压等于相电压,线电流等于相电流的倍。星形接法是将u相、v相、w相的各相连接在它们的一端的中性点n的接法。在星形接法中,线间电压等于相电压倍,线电流等于相电流。
[0036]
在各单相整流电路模块11、12、13的后级分别设置有dc环节v
dc1
、v
dc2
、v
dc3
(参照图5和图6)。
[0037]
逆变器电路模块21将由单相整流电路模块11转换后的dc电压v
dc1
转换为三相ac输出电压v
11a
、v
11b
、v
11c
。逆变器电路模块22将由单相整流电路模块12转换后的dc电压v
dc2
转换为三相ac输出电压v
12a
、v
12b
、v
12c
。逆变器电路模块21将由单相整流电路模块13转换后的dc
电压v
dc3
转换为三相ac输出电压v
13a
、v
13b
、v
13c
。三相ac输出电压v
11a
、v
11b
、v
11c
被供给到三相马达的第一绕组ws1。三相ac输出电压v
12a
、v
12b
、v
12c
被供给到三相马达的第二绕组ws2。三相ac输出电压v
13a
、v
13b
、v
13c
被供给到三相马达的第三绕组ws3。这样,通过被供给到第一绕组ws1、第二绕组ws2及第三绕组ws3的三相输出来驱动三相马达。
[0038]
控制部31控制构成单相整流电路模块11及逆变器电路模块21的开关元件,并且,控制部32控制构成单相整流电路模块12及逆变器电路模块22的开关元件,并且,控制部33控制构成单相整流电路模块13及逆变器电路模块23的开关元件,以在单相整流电路模块11、12、13中的任一方发生了故障时,使其余的上述单相整流电路模块及上述逆变器电路模块均等地输出三相ac输出功率。
[0039]
图3是示出在图1的ac-ac转换器中、单相整流电路模块中的一个、即单相整流电路模块13发生了故障时的状态的图。设为在单相整流电路模块13发生故障之前,单相整流电路模块11、12、13分别均等地输出了1/3的三相ac输出功率。若单相整流电路模块13发生了故障,则控制部31控制构成单相整流电路模块11及逆变器电路模块21的开关元件,并且,控制部32控制构成单相整流电路模块12及逆变器电路模块22的开关元件,并且,控制部33控制构成单相整流电路模块13及逆变器电路模块23的开关元件,以使其余的单相整流电路模块11及逆变器电路模块21、单相整流电路模块12及逆变器电路模块22均等地输出1/2的三相ac输出功率。此时,马达的第三绕组ws3不进行动作,但是由于向其余的绕组ws1、ws2的输出从1/3增加至1/2,因此马达的总输出不变化。如图3所示,由于单相整流电路模块11、12、13使用三角形接法来相互连接,因此即使单相整流电路模块13发生了故障,也在该故障的影响不波及到其余的单相整流电路模块11、12的情况下输出三相ac输出功率,能够可容错地继续驱动马达。
[0040]
图4是示出在图2的ac-ac转换器中、单相整流电路模块中的一个、即单相整流电路模块13发生了故障时的状态的图。设为在单相整流电路模块13发生故障之前,单相整流电路模块11、12、13分别均等地输出了1/3的三相ac输出功率。若单相整流电路模块13发生了故障,则控制部31控制构成单相整流电路模块11及逆变器电路模块21的开关元件,并且,控制部32控制构成单相整流电路模块12及逆变器电路模块22的开关元件,并且,控制部33控制构成单相整流电路模块13及逆变器电路模块23的开关元件,以使其余的单相整流电路模块11及逆变器电路模块21、单相整流电路模块12及逆变器电路模块22均等地输出1/2的三相ac输出功率。此时,马达的第三绕组ws3不进行动作,但是由于向其余的绕组ws1、ws2的输出从1/3增加至1/2,因此马达的总输出不变化。如图4所示,由于单相整流电路模块11、12、13使用星形接法来相互连接,因此即使单相整流电路模块13发生了故障,也在该故障的影响不波及到其余的单相整流电路模块11、12的情况下输出三相ac输出功率,能够可容错地继续驱动马达。
[0041]
如以上说明的那样,根据本实施方式,能够实现可容错的、小型化、高密度化后的马达驱动系统。
[0042]
在以上的实施方式中,单相整流电路模块的数量和逆变器电路模块的数量均为3个。但是不限于此,关于整流电路模块和逆变器电路模块的数量,只要两者为相同数量即可,也可以是3的任意倍数。例如是以下等情况:在整流电路模块和逆变器电路模块为6个(3个
×
2)的情况下,能够构成2组三角形接法或星形接法,在整流电路模块和逆变器电路模块
为9个(3个
×
3)的情况下,能够构成3组三角形接法或星形接法。
[0043]
在以上的实施方式中,提供了3个控制部31、32、33,它们分别独立地控制单相整流电路模块11及逆变器电路模块21、单相整流电路模块12及逆变器电路模块22、单相整流电路模块13及逆变器电路模块23。但是不限于此,例如也可以是1个控制部综合控制单相整流电路模块11、12、13及逆变器电路模块21、22、23。
[0044]
[第二实施方式]
[0045]
图5和图6是第二实施方式所涉及的ac-ac转换器2的功能框图。ac-ac转换器2在图1和图2的ac-ac转换器1的结构中追加设置切换部50。ac-ac转换器2的其它结构与ac-ac转换器1相同,因此省略重复的说明。
[0046]
切换部50使单相整流电路模块11、12、13在三角形接法与星形接法之间进行切换。切换部50例如既可以是自动开关,也可以是手动开关。图5示出被切换部50切换为三角形接法时的ac-ac转换器2。图6示出被切换部50切换为星形接法时的ac-ac转换器2。
[0047]
根据本实施方式,能够根据输入电压的大小、应用来使单相整流电路模块的接法在三角形接法与星形接法之间自由地进行切换。
[0048]
[第三实施方式]
[0049]
图7的上段是三角形接法时及星形接法时的整流器输入电压vr相对于电源电压vg的曲线图。其中,横轴的电源电压使用相对于dc环节电压的最大值v
dc,max
的比vg/v
dc,max
来表示(以下相同)。图7的中段是三角形接法时及星形接法时的调制率mr相对于电源电压vg的曲线图。在此,调制率mr被定义为整流器输入峰值电压vr与dc环节电压v
dc
之比。即,
[0050]
mr=vr/v
dc
。
[0051]
图7的下段是三角形接法时及星形接法时的整流器输入电流ir相对于电源电压vg的曲线图。
[0052]
在三角形接法的情况下,整流器输入电压等于线间电压。因而,整流器输入电压v
r,d
为电源电压vg的倍(下面,设为下标的右侧的d表示三角形接法,y表示星形接法)。即,
[0053][0054]
因而,三角形接法时的调制率m
r,d
为:
[0055][0056]
在星形接法的情况下,整流器输入电压等于线间电压。因而,
[0057]vr,y
=vg。
[0058]
调制率m
r,y
为:
[0059]mr,y
=vg/v
dc
。
[0060]
如图7所示,在电源电压小时得到高整流器输入电压的方面,使用三角形接法比使用星形接法更有利。另一方面,在电源电压高时,整流器输入电压变得过于高,因此使用星形接法比使用三角形接法更有利。特别是,若在电源电压vg为dc环节电压的最大值v
dc,max
的以上时使用三角形接法,则需要将最大dc环节电压v
dc,max
设计为
最大电源电压的倍以上,需要使用高耐压的部件。
[0061]
根据以上所述,在第三实施方式中,将电源电压vg与在上述单相整流电路模块的后级设置的dc环节的dc环节电压的最大值v
dc,max
之比设为r时,在r小于规定的值时,切换部50将单相整流电路模块11、12、13切换为三角形接法,在r为规定的值以上时,切换部50将单相整流电路模块11、12、13切换为星形接法。
[0062]
根据本实施方式,能够根据电源电压的大小来使单相整流电路模块的接法在三角形接法与星形接法之间准确地进行切换。
[0063]
特别地,r的值也可以处于的范围内。由此,能够具有
±
5%的余量,并选择准确的r。
[0064]
特别地,r的值也可以为由此,能够选择最优的r。
[0065]
[第四实施方式]
[0066]
在第四实施方式中,控制部31控制构成单相整流电路模块11及上述逆变器电路模块21的开关元件,并且,控制部32控制构成单相整流电路模块12及上述逆变器电路模块22的开关元件,并且,控制部33控制构成单相整流电路模块13及上述逆变器电路模块23的开关元件,以使dc电压为固定、并且使从三相ac电源输入的三相输入电流的相位与三相ac输入电压的相位一致。
[0067]
这样,控制部31控制单相整流电路模块11及逆变器电路模块21,并且,控制部32控制单相整流电路模块12及逆变器电路模块22,并且,控制部33控制单相整流电路模块13及逆变器电路模块23,由此能够吸收单相整流电路模块11、12及13所生成的dc电压所产生的功率的脉动。即,根据本实施方式,能够使整流电路100为pfc整流电路,因此能够实现功率因数=1的控制。
[0068]
[第五实施方式]
[0069]
在第五实施方式中,控制部31、32、33基于上述dc环节电压与目标环节电压之差来计算目标电容器功率,通过从目标dc功率中减去上述目标电容器功率来计算目标马达功率,基于目标电容器功率及目标马达功率来控制构成单相整流电路模块11及逆变器电路模块21的开关元件、单相整流电路模块12及逆变器电路模块22的开关元件、单相整流电路模块13及逆变器电路模块23的开关元件,以使得吸收与三相ac输入电压有关的三相ac功率的脉动以及与dc电压有关的dc功率的脉动。根据该实施方式,无需使用大容量的dc环节电容器,就能够吸收功率脉动。
[0070]
下面,使用图8来详细说明第五实施方式中的控制部31、32、33的结构及动作。图8是控制部31的详细的功能框图(图8示出控制部31来代表控制部31、32、33,控制部32、33的情况也相同)。控制部31具备dc环节电压控制部42、整流电路控制部44、速度控制部46以及逆变器控制部48。控制部31控制构成单相整流电路模块11及逆变器电路模块21的开关元件,来调整所生成的dc电压及三相ac电压。
[0071]
dc环节电压控制部42具备第一输入端42b、第二输入端42c以及输出端42d。整流电路控制部44具备输入端44b以及输出端44c。速度控制部46具备第一输入端46b、第二输入端46c以及输出端46d。逆变器控制部48具备输入端48b、第一输出端48c、第二输出端48d以及第三输出端48e。控制部31在dc环节电压控制部42的输出端42d与整流电路控制部44的输入
端44b之间设置低通滤波器43a。控制部31在速度控制部46的第二输入端46c的前级设置低通滤波器43b。
[0072]
向dc环节电压控制部42的第一输入端42b输入目标dc环节电压v
dc
*。向第二输入端42c输入当前的dc环节电压v
dc
。dc环节电压控制部42基于v
dc
*与v
dc
之差δv
dc
(未图示),来求出目标电容器功率pc*,并将其从输出端42d输出。
[0073]
从dc环节电压控制部42的输出端42d输出的目标电容器功率pc*在分支点v3被分支为2个,一个被输入到低通滤波器43a。低通滤波器43a从pc*中吸收高频成分来生成目标平均电容器功率《pc》*,并将其输出。从低通滤波器43a输出的《pc》*在分支点v4被分支为2个,一个与从速度控制部46的输出端46d输出的目标平均逆变器输出《p
inv
》*相加。其结果,目标平均整流功率《p
pfc
》*被计算为《p
pfc
》*=《pc》*+《p
inv
》*。计算出的《p
pfc
》*被输入到整流电路控制部44的输入端44b。从在分支点v3被分支出的pc*的另一个中减去在分支点v4被分支出的《pc》*的另一个,来生成输入功率脉动p
c,ac
。即,输入功率脉动p
c,ac
是从目标电容器功率pc*中仅提取其脉动部分而得到的。从目标整流功率p
pfc
*中减去输入功率脉动p
c,ac
,来计算目标马达功率pm*(pm*=p
pfc
*-p
c,ac
)。计算出的pm*被输入到逆变器控制部48的输入端48b。
[0074]
这样,被输入到逆变器控制部48的目标马达功率pm*是从目标整流功率p
pfc
*中减去输入功率脉动p
c,ac
而得到的。即,向三相马达600输入dc环节的脉动δp
dc
。三相马达600利用与三相马达600连接的负载所具有的惯性来补偿该脉动。其结果,dc环节的脉动被吸收,pm=pg成立。即,马达功率pm与输入功率pg一致。
[0075]
起因于三相马达600对输入功率pg的补偿,三相马达600的速度ω以输入功率pg的频率fg的2倍的频率2fg进行脉动。因此,如以下这样使用低通滤波器来去除ω的高频成分。当前的马达的速度ω被输入到低通滤波器43b。低通滤波器43b从ω中去除高频成分来生成当前的马达的平均速度《ω》,并将其输入到速度控制部46的第二输入端46c。向速度控制部46的第一输入端46b输入三相马达600的目标平均速度《ω》*。速度控制部46基于《ω》*与《ω》之差δω(未图示)来求出目标平均逆变器输出《p
inv
》*,并将其从输出端46d输出。
[0076]
整流电路控制部44以前馈的方式控制整流电路10,以使dc环节电压v
dc
保持为固定。从速度控制部46的输出端46d输出的目标平均逆变器输出《p
inv
》*与从低通滤波器43a输出的目标平均电容器功率《pc》*相加。其结果,目标平均整流功率《p
pfc
》*被计算为《p
pfc
》*=《pc》*+《p
inv
》*。计算出的《p
pfc
》*被输入到整流电路控制部44的输入端44b。整流电路控制部44基于被输入的《p
pfc
》*来计算目标输入电流ig*(未图示),根据电感器电流差来求出输出占空比db,并将其从输出端44c输出。所输出的输出占空比db经由脉宽调制器(未图示)被输入到整流电路100来实现期望的控制。
[0077]
根据本实施方式,能够利用如上所述具体地构成的控制部31、32、33,使用马达的负载来吸收功率脉动。由此,无需使用大容量的dc环节电容器,就能够实现马达驱动系统整体的进一步的小型化、高密度化、低成本化、长寿命化。
[0078]
[第六实施方式]
[0079]
在第六实施方式中,在各单相整流电路模块11、12、13的后级分别设置的dc环节v
dc1
、v
dc2
、v
dc3
具备电容。这些电容用于吸收与三相ac输入电压有关的三相ac功率的脉动以及与dc电压有关的dc功率的脉动。
[0080]
在典型的例子中,在整流电路103以数kw和数百v进行动作的情况下,这些电容的容量为mf级。
[0081]
根据本实施方式,能够在不设置特别的控制部的情况下吸收功率脉动。
[0082]
[第七实施方式]
[0083]
在第七实施方式中,控制部31控制构成单相整流电路模块11及逆变器电路模块21的开关元件,并且,控制部32控制构成单相整流电路模块12及逆变器电路模块22的开关元件,并且,控制部33控制构成单相整流电路模块13及逆变器电路模块23的开关元件,以使来自三相ac电源的输入功率均等地分配到全部的单相整流电路模块11、12、13。即,单相整流电路模块11、12、13向逆变器电路模块21、22、23分别均等地输出1/3的三相ac输出功率。在该情况下,由于向三相马达的绕组ws1、ws2、ws3均等地供给相同大小的功率,因此马达被平稳地驱动。
[0084]
根据本实施方式,能够实现平稳的马达驱动。
[0085]
[第八实施方式]
[0086]
在第八实施方式中,控制部31控制构成单相整流电路模块11及逆变器电路模块21的开关元件,并且,控制部32控制构成单相整流电路模块12及逆变器电路模块22的开关元件,并且,控制部33控制构成单相整流电路模块13及逆变器电路模块23的开关元件,以使来自三相ac电源的输入功率以不同的比率分配到单相整流电路模块11、12、13。例如控制部31、32、33也可以计算各相的马达驱动效率,来求出能够最高效地驱动马达的功率分配。其结果,例如是以下等情况:向单相整流电路模块11、12、13分别分配输入功率的50%、30%、20%,或者分别分配50%、50%、0%(在该情况下,均等地分配给u相及v相的模块,w相的模块停止)。
[0087]
根据本实施方式,能够实现高效的马达驱动。
[0088]
[第九实施方式]
[0089]
在第九实施方式中,控制部31、32、33计算三相ac电源的各相的电源电压,并且控制构成单相整流电路模块11及上述逆变器电路模块21的开关元件、单相整流电路模块12及上述逆变器电路模块22的开关元件、单相整流电路模块13及上述逆变器电路模块23的开关元件,以使被分配到与电源电压高的相相当的单相整流电路模块的功率量比被分配到与电源电压低的相相当的单相整流电路模块的功率量更大。这在电源电压的各相间存在不均衡的情况下,向与电源电压高的相相当的负载供给更多的功率,由此补偿该不均衡。由此,即使在电源电压的各相间存在不均衡的情况下,也能够以最优的效率驱动马达。
[0090]
根据本实施方式,能够实现高效的马达驱动。
[0091]
以上,基于本发明的实施方式进行了说明。该实施方式是示例,本领域技术人员理解能够在本发明的权利要求的范围内进行各种变形及变更,另外,本领域技术人员理解这样的变形例及变更也处于本发明的权利要求的范围。因而,本说明书中的记述和附图不应被当作限定性的,而应被当作例证性的。
[0092]
上述的各实施方式与变形例的任意组合作为本发明的实施方式也是有用的。通过组合而产生的新的实施方式兼具被组合的各实施方式及变形例各自的效果。
[0093]
附图标记说明
[0094]
1、2:ac-ac转换器;11、12、13:单相整流电路模块;21、22、23:逆变器电路模块;31、
32、33:控制部;50:控制部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1