三相定子组件的制作方法
1.本公开涉及一种电动泵驱动马达的三相定子组件。这种三相定子组件可以特别用在泵组件的永磁同步马达(pmsm)中。
背景技术:
2.在电动马达中使用包括复数个定子段的定子组件是已知的。例如,专利文献us2007/0232094a1、wo2011/108735a1或us2007/0182265a1描述了这种定子组件。
3.然而,根据需要以有效且安全的方式将定子段彼此电连接是一种技术挑战。如从现有技术中已知那样来安装和连接线圈线通常需要人工作业,并且因此易于出现人为错误和质量问题。此外,现有技术的连接线通常比所需的更长,并消耗不必要的空间和材料。
技术实现要素:
4.因此,本公开的目的是提供一种三相定子组件,其能够由机器更自动地组装,而不需要人工作业或只需要较少的人工作业,且其消耗较少的空间和材料。
5.因此,本发明提供一种本发明技术方案的三相定子组件。三相定子组件的优选实施例可以从说明书和附图中得到。
6.如本文所公开的三相定子组件特别适用于电动泵驱动马达,例如永磁同步马达(pmsm)。定子组件包括:
[0007]-三组定子段,其中,定子段围绕轴向延伸的定子轴线布置成环形布置,其中,每组定子段包括围绕定子轴线以n重旋转对称布置的n≥2个定子段,其中,每个定子段包括具有第一线圈线端部和第二线圈线端部的线圈;以及-布置在定子段的轴向前侧上的复数3n-3条连接线,其中,每条连接线串联连接相应组定子段的两个线圈,其中,另外两组定子段的第一插入定子段和第二插入定子段沿周向方向被布置在所述相应组定子段的两个连接的线圈之间。
[0008]
至少3n-5条连接线以距定子轴线的第一径向距离横跨第一插入定子段,并以距定子轴线的第二径向距离横跨第二插入定子段,其中,第二径向距离大于第一径向距离。
[0009]
因此,重要的是理解,连接线不是简单地遵循与定子轴线同心的圆形路径,以串联连接一组定子段的两个线圈。每条连接线横跨放置在其间的另外两组的两个插入定子段,即第一插入定子段和第二插入定子段。通过增加连接线在其从第一定子段到第二定子段的路径上的径向距离,连接线能够采取非常短的路径并且可以被设计成相对短且容易组装。同样重要的是注意,没有线圈线在两个或更多个定子段上延伸。因此,需要连接线来连接一组定子段的线圈线。
[0010]
定子组件包括总数为3n个定子段,布置成三组n个定子段。在此,i应该是组的下标,即i={1,2,3}。此外,j应该是用于定子段在一组内的下标,即j={1,
…
,n}。因此,一特定的定子段可以表示为s
i,j
,这意味着第i组中的第j个定子段。定子组件至少包括总数3n-3条连接线,其中n-1条连接线归属于每组定子段。因此,k应该为一组连接线的下标,即k=
{1,
…
,n-1},使得一特定的连接线可表示为w
i,k
,这意味着第i组中的第k条连接线。优选地,在制造和组装过程中,在将定子段布置成环形布置以形成定子组件之前,这些定子段是完全单独(separate,分离)的单元。优选地,在制造和组装过程中,在将定子段布置成环形布置以形成定子组件之后,通过连接线将一组定子段的线圈线相互连接。
[0011]
可选地,至少3n-5条连接线可以具有相同或基本上相同的形状和长度。这非常便于自动化和复杂性。应该注意,总数为3n-3条连接线的第一个(i=1,k=1)和最后一个(i=3,k=n-1)原则上可以具有不同的形状和/或长度,但是优选地也具有与其它3n-5条连接线相同的形状和长度,使得优选地3n-3个全部都具有相同的形状和长度。
[0012]
可选地,所有连接线可以沿着它们的全长基本上在垂直于定子轴线的一共同平面中延伸。这是非常节省空间的布置,并且对于通过机器自动组装连接线也是有利的,这是因为不需要连接线的交叉或提升。
[0013]
可选地,三相定子组件还可包括星点线(star point wire),其中,星点线将三组定子段中的第(j=n)定子段的线圈的第一线圈线端部相互连接。当一组定子段中的定子段相互串联连接时,每组定子段中的最后(j=n)定子段可以被连接至星点线。
[0014]
可选地,三相定子组件还可包括具有三相的三相电力输入线,其中,每个相被连接至相应组定子段中的第一(j=1)定子段的线圈的第二线圈线端部。因此,每组定子段的第一定子段被连接至三相电力输入线的三个相中的一个相。优选地,定子段的线圈的第二线圈线端部被布置在定子段的径向外侧处,而第一线圈线端部优选地被布置在定子段的径向内侧处。
[0015]
可选地,所有定子段彼此相同以有利于自动化过程并减少了部件差异。可选地,三相定子组件还可包括布置在定子段的轴向前侧处的线引导元件,其中,线引导元件限定复数个线路径,其中,线路径围绕定子轴线以3n重旋转对称布置。由此,这些线路径相同地跨过所有定子段,这在组装连接线之前提供了三相定子组件的精确的3n重旋转对称。这对于组装过程的有效自动化是非常有益的。
[0016]
可选地,线引导元件包括复数3n个单独且相同的线引导结构,其中,每个线引导结构被布置在相应定子段的轴向前侧。因此,在定子段被组装以形成用于定子组件的环形布置之前,每个线引导结构可以是定子段的部件。可替代地,在定子段被组装以形成定子组件的环形布置之后,这些线引导结构中的一个或多个可以相互连接并且被装配到三相定子组件的轴向前侧。线引导结构可以全部进行连接以形成一体的环形线引导元件,在将定子段形成为所述环形布置之后,该一体的环形线引导元件被装配到轴向前侧的轴向前侧。
[0017]
可选地,线引导结构沿周向方向彼此具有一定距离。这种距离对于连接线“切换”到相邻的线引导结构之间的更径向向外的线路径可能是有益的。
[0018]
可选地,线引导元件可以通过正配合(positive fit)固定到定子段的轴向前侧。例如,它可以卡入到设置在每个定子段的轴向前侧处的卡入机构中。
[0019]
可选地,线引导元件可以径向地布置在相应定子段的线圈的第一线圈线端部与第二线圈线端部之间。
[0020]
可选地,每个定子段的线圈的第一线圈线端部可以布置在相应定子元件的第一横向侧处,并且每个定子段的线圈的第二线圈线端部可以布置在相应定子段的第二横向侧处。连接线可以将一组定子段的一定子段的线圈的第一线圈线端部与所述组定子段的下一
个串联定子段的线圈的第二线圈线端部连接。因此,将线圈线端部布置在定子段的不同横向侧处有益于减小连接线的长度。
[0021]
可选地,每个定子段还可包括用于将连接线与第一线圈线端部连接的第一绝缘移位端子和用于将连接线与第二线圈线端部连接的第二绝缘移位端子。这样的绝缘移位端子还有利于便于自动化过程。绝缘移位端子横向地切割穿过相应线的绝缘覆层,以便建立与线的电连接并且机械地固定线两者。
[0022]
可选地,第一绝缘移位端子被轴向地插入到限定于定子段的轴向前侧处的第一槽中,并且第二绝缘移位端子被轴向地插入到限定于定子段的轴向前侧处的第二槽中。
[0023]
可选地,第一槽和/或第二槽相对于定子段的环形布置基本上切向地延伸。由此,绝缘移位端子与连接线之间的连接对于沿着连接线的拉力而言更安全,这是由于连接线在靠近绝缘移位端子处弯曲大约90度。相应的连接线端部在安装移位端子内的定向可以是径向的,而连接线的其余部分横跨另外两组定子段中的两个插入定子段。
[0024]
可选地,第一线圈线端部和连接线的第一端部两者均径向地延伸穿过第一槽,其中,第一线圈线端部被接纳在第一绝缘移位端子的第一凹部中,并且连接线的第一端部被接纳在第一绝缘移位端子的第二凹部中,和/或第二线圈线端部和连接线的第二端部径向地延伸穿过第二槽,其中,第二线圈线端部被接纳在第二绝缘移位端子的第一凹部中,并且连接线的第二端部被接纳在第二绝缘移位端子的第二凹部中。优选地,第一绝缘移位端子和第二绝缘移位端子在形状和尺寸上相同。可选地,绝缘移位端子的第一凹部和第二凹部可以布置在相应的绝缘移位端子的相对的轴向侧处。因此,绝缘移位端子可以轴向地插入相应的槽中,以用于建立与相应线圈线端部的电接触。随后,连接线的相应端部被轴向地压入绝缘移位端子的另一凹部中。
[0025]
可选地,连接线彼此不交叉。换句话说,定子组件优选地没有任何交叉连接线。这非常便于自动化。
[0026]
可选地,对于每个定子段,第一线圈线端部可以布置在定子段的径向内侧处,并且第二线圈线可以布置在定子段的径向外侧处。每条连接线优选地布置在定子段的径向内侧与定子段的径向外侧之间。优选地,没有连接线从定子段的径向内侧向内延伸或从定子段的径向外侧向外延伸。由此,连接线整齐地布置在定子段的径向内侧与定子段的径向外侧之间的环形区域中。
[0027]
可选地,所有定子段可以基本上相同,并且仅在它们与连接线、星点线和/或输入线相位的连接方面不同。
[0028]
可选地,每条连接线可以最大程度地横跨在至的范围内的方位角距离。
[0029]
可选地,一组定子段的线圈的第一线圈线端部和所述组定子段的下一个串联连接的线圈的第二线圈线端部彼此的方位角距离在至的范围内。
附图说明
[0030]
下面,参照附图更详细地描述本公开,其中:
[0031]
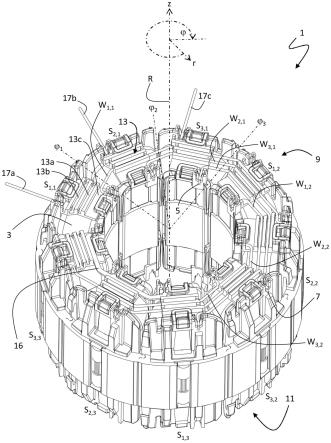
图1示出了根据本公开的完全组装的三相定子组件的实施例的示例的立体图;
[0032]
图2示出了连接线到定子轴线的径向距离的图表,该径向距离作为如图1所示的定子组件的方位角的函数;
[0033]
图3示出了根据图1的定子段的线圈成形部的分解立体图;
[0034]
图4示出了根据图3的定子段的线圈成形部的立体图;
[0035]
图5示出了根据图4的定子段的线圈成形部在线圈缠绕之后和第一和第二绝缘移位端子被插入之前的立体图;
[0036]
图6示出了根据图5的定子段在第一和第二绝缘移位端子已插入之后的立体图;
[0037]
图7示出了根据图6的定子段在将线引导结构装配到定子段的轴向前侧之后的立体图;
[0038]
图8示出了根据图7的9个定子段的环形布置的立体图;
[0039]
图9示出了根据图8的环形布置在安装连接线之后的立体图;
[0040]
图10示出了根据图9的环形布置在星点线绝缘之后的立体图;以及
[0041]
图11示出了包括9个独立且相同的线引导结构的一体环形线引导元件的替代实施例的立体图。
[0042]
【附图标记列表】
[0043]
1 定子组件
[0044]
3 线圈
[0045]
5 第一线圈线端部
[0046]
7 第二线圈线端部
[0047]
9 轴向前侧
[0048]
11 轴向后侧
[0049]
13 线引导结构
[0050]
15 线引导元件
[0051]
15a,b,c 线路径
[0052]
16 星点线
[0053]
17a,b,c 三相电力输入线的相
[0054]
19 芯
[0055]
21a 前部
[0056]
21b 后部
[0057]
23a 第一槽
[0058]
23b 第二槽
[0059]
25a 第一横向侧
[0060]
25b 第二横向侧
[0061]
27a 第一绝缘移位端子
[0062]
27b 第二绝缘移位端子
[0063]
29 第一凹部
[0064]
31 第二凹部
[0065]
33a 第一连接线端部
[0066]
33b 第二连接线端部
[0067]
i 用于一组定子段的下标
[0068]
j 用于一组定子段内的定子段的下标
[0069]
k 用于针对一组定子段的连接线的下标
[0070]si,j 定子段
[0071]wi,k 连接线
[0072]
r 定子轴线
[0073]
方位角
[0074]
a 对称平面
[0075]r1 第一径向距离
[0076]r2 第二径向距离
具体实施方式
[0077]
图1示出了包括9个相同的定子段s
i,j
的三相定子组件1,其中,i应该是总共三组中的一组的下标,即,i={1,2,3}。每组定子段包括n≥2个定子段s
i,j
,这些定子段围绕定子轴线r以n重旋转对称布置。在图1所示的示例中,每组定子段包括三个定子段,即,n=3,其中,j应该是一组定子段内的一定子段的下标,即,j={1,
…
,n}。
[0078]
为了使附图更容易理解,限定如图1所示的柱坐标系是有用的,其中,轴向位置由沿着转子轴线r延伸的z表示,沿周向方向的位置由方位角表示,并且到转子轴线r的径向距离由r表示。按照任意惯例,正z方向可以为“向前”或“到前侧”,并且负z方向可以为“向后”或“到后侧”。
[0079]
每个定子段s
i,j
包括具有第一线圈线端部5和第二线圈线端部7的线圈3。第一线圈线端部5和第二线圈线端部7两者均布置在定子段s
i,j
的轴向前侧9处。定子组件1的轴向后侧11在图1中是背向的。
[0080]
如图1所示的三相定子组件1还包括复数3n-3=6条连接线w
i,k
,其中,i={1,2,3}应该示出用于关联组的定子段s
i,j
的下标,并且k={1,
…
,n-1}应该是所述组中的连接线的下标。每条连接线w
i,k
串联连接相应组定子段s
i,j
的两个线圈。因此,每组定子段s
i,j
包括n-1=2条连接线w
i,1
和w
i,2
。因此,连接线w
1,1
连接定子段s
1,1
和s
1,2
的线圈3;连接线w
1,2
连接定子段s
1,2
和s
1,3
的线圈3;连接线w
2,1
连接定子段s
2,1
和s
2,2
的线圈3;连接线w
2,2
连接定子段s
2,2
和s
2,3
的线圈3;连接线w
3,1
连接定子段s
3,1
和s
3,2
的线圈3;并且连接线w
3,2
连接定子段s
3,2
和s
3,3
的线圈3。在一组的两个串联连接的定子段之间,存在沿周向方向布置在所述两个串联连接的定子段之间的另外两组定子段的第一插入定子段和第二插入定子段。这意味着,连接线w
i,k
必须横跨至少两个插入定子段以串联连接一组的两个线圈。
[0081]
例如,第一插入定子段s
2,1
和第二插入定子段s
3,1
沿周向方向布置在第一组(i=1)定子段的定子段s
1,1
和s
1,2
的两个连接的线圈之间。类似地,插入的第一和第二定子段s
3,1
和s
1,2
布置在第二组(i=2)定子段的定子段s
2,1
与s
2,2
之间,等等。六条连接线w
i,k
具有相同的形状和长度。然而,在替代实施例中,第一连接线w
1,1
和最后连接线w
3,2
可以具有稍微不同的形状和/或长度的更多选项。在此,所有连接线w
i,k
在距定子r的第一径向距离r1处横跨第一插入定子段(另外两组定子段的第一定子段被布置在相应组定子段的定子段的两个连接的
线圈之间)。此外,每条连接线w
i,k
在距定子轴线r的第二径向距离r2处横跨第二插入定子段(另外两组定子段的第二定子段被布置在相应组定子段的定子段的两个连接的线圈之间)。第二径向距离r2大于第一径向距离r1,即r2》r1。这意味着连接线w
i,k
不遵循与定子轴线r同轴的严格圆形路径,而是在其路径上在相应组定子段的定子段的两个连接的线圈之间有效地径向向外延伸。例如,第一连接线w
1,1
连接定子段s
1,1
和s
1,2
的线圈。连接线w
1,1
在第一径向距离r1处与第一定子段s
2,1
交叉,并且在第二径向距离r2处与第二定子段s
3,1
交叉,其中,第二径向距离r2大于第一径向距离r1。因此,连接线w
i,k
遵循形状类似于具有线性的蜘蛛网的圆形线(circular threats)的“盘旋”路径。换句话说,连接线w
i,k
沿着它们的路径径向向外盘旋,以用于连接两个定子段s
i,j
和s
i,j+1
的线圈3。
[0082]
图2示出了连接线w
i,k
到定子轴线r的径向距离r(在任意相对尺度上)的图表,该径向距离作为如图1所示的定子组件1的方位角的函数相邻定子段s
1,1
与s
2,1
之间的方位位置在此被限定为0
°
,其中,被任意地设定为1。由于每个定子段覆盖的方位角范围,相邻定子段s
2,1
与s
3,1
之间的方位位置在此被限定为40
°
,相邻定子段s
3,1
和s
1,2
之间的方位位置在此被限定为80
°
。因此,连接线w
i,k
横跨在大于80
°
的方位角范围上。在与之间的该范围内,连接线w
i,k
到定子轴线r的径向距离沿着连接线w
i,k
的长度变化。如图2所示,处在与之间的范围内的第二径向距离r2总是大于处在与之间的范围内的第一径向距离r1。存在用于限定第一径向距离r1和第二径向距离r2的若干选项,对于所有这些选项,满足r2》r1。例如,和即可以比较相应的方位范围内的平均径向距离。可替代地,可以比较相应方位范围内的中值径向距离值。可替代地,可以比较在中心方位位置20
°
和60
°
处的径向距离值。应该注意,径向距离可以沿着连接线w
i,k
的长度连续地增加,但是这不是必须的。如图2中可见,径向距离甚至可以在例如10
°‑
20
°
和50
°‑
60
°
的范围内短暂地减小。这是由于连接线w
i,k
在此具有处在与之间的范围中的三个线性部分,在这些部分之间在方位位置10
°
和50
°
处存在两个弯曲或扭结。这些弯曲或扭结在图2中作为函数中的尖峰可见。
[0083]
返回图1,每个定子段s
i,j
装备有布置在相应定子段s
i,j
的轴向前侧9处的线引导结构13。所有9个线引导结构13被布置在垂直于转子轴线r的相同平面中。所有9个线引导结构13可以一起视为线引导元件15。该线引导元件15可以是环形整体结构,其中,线引导结构13如图11所示相互连接。然而,在如图1至10所示的实施例中,线引导结构13彼此是单独的并且沿周向方向彼此具有一定距离。所有线引导结构13彼此相同。每个线引导结构13通过正配合(例如夹持连接或卡入连接)被固定到相应定子段s
i,j
的轴向前侧9。
[0084]
每个线引导结构13限定了用于引导一连接线w
i,k
跨过第一插入定子段的基本上切向的第一路径13a和用于引导另一连接线w
i,k
跨过第二插入定子段s
i,j
的基本上切向的第二路径13b。第一路径13a比第二路径13b被定位得径向更向内。线引导结构13还限定了用于引
导星点线16的基本上切向的第三路径13c,第三路径13c比第一路径13a更径向向内布置。星点线16将最后(j=n)定子段s
1,3
、s
2,3
和s
3,3
的线圈3的第一线圈线端部5相互连接。星点线16可以具有比连接线w
i,k
更大的直径。路径13a-c在此全部是线性的,但是在其它未示出的实施例中可以至少部分是非线性的。
[0085]
每组的第一(j=1)定子段s
1,1
、s
2,1
和s
3,1
的第二线圈端部7分别连接到包括三相17a、b、c的三相电力输入线的一相17a、b、c。
[0086]
图3至7示出了定子段s
i,j
的逐步组装。图3示出了定子段s
i,j
的线圈成形元件的分解视图。线圈成形元件包括具有h形横截面的高导磁率的轴向中心芯19,例如铁。线圈成形元件还包括轴向前部21a和轴向后部21b,它们被附接到芯19的相对轴向侧上。前部21a和后部21b可以由电绝缘材料构成,即塑料、复合材料或陶瓷材料。前部21a和后部21b可以相对于垂直转子轴线r延伸的轴向中心对称平面a彼此镜像对称地成型。前部21a包括第一槽23a和第二槽23b,它们两者均轴向地向前敞开。第一槽23a和第二槽23b相对于定子段s
i,j
的环形布置切向地延伸。第一槽23a和第二槽23b在方位角方面彼此成角度地偏移,使得第一槽23a被定位在定子段s
i,j
的第一横向侧25a处,并且第二槽23b被定位在定子段s
i,j
的第二横向侧25b处。
[0087]
第一槽23a和第二槽23b包括v形切口,第一线圈线端部5和第二线圈线端部7可以分别放置到该v形切口中。第一槽23a和第二槽23b中的v形切口形成径向延伸的凹槽26a、b,第一线圈线端部5和第二线圈线端部7可以分别插入这些凹槽中。
[0088]
图4示出了组装在一起的图2的路径。如图3所示的线圈成形路径准备接纳线圈线。在图5中,线圈线围绕线圈成形元件缠绕,以形成线圈3。第一线圈线端部5插入第一槽23a的凹槽26a中,使得其径向向内延伸以与第一槽23a交叉。类似地,第二线圈线端部7插入第二槽23b的凹槽26b中,在该凹槽中,第二线圈线端部7径向向外延伸跨过第二槽23b。图5还分别示出了在轴向插入第一槽23a和第二槽23b中之前的第一绝缘移位端子27a和第二绝缘移位端子27b。绝缘移位端子27a、b彼此相同并且包括(向后)面向槽23a、b的v形第一凹部29。绝缘移位端子27a、b具有相对于垂直于转子轴线r延伸的中心对称平面镜像对称的形状。因此,绝缘移位端子27a、b分别包括轴向背对槽23a、b的v形第二凹部31。如图6所示,绝缘移位端子27a、b被轴向向下压入槽23a、b中,使得第一凹部29接纳相应的线圈线端部5、7。由此,线圈线端部5、7通过绝缘移位端子27a、b固定就位。此外,绝缘移位端子27a、b切入线圈线端部5、7的绝缘覆层中,使得在绝缘移位端子27a、b和相应的线圈线端部5、7之间存在电接触,绝缘移位端子27a、b优选地为金属。图6示出了绝缘移位端子27a、b已经插入槽25a、b中之后的情况。
[0089]
图7示出了完全组装的定子段s
i,j
,其中,线引导结构13布置在定子段s
i,j
的轴向前侧9处。线引导结构13基本上在垂直于转子轴线r的平面内延伸,并且卡入到与定子段s
i,j
的前部21a的正配合中。
[0090]
图8示出了在如图7所示的9个相同的定子段s
i,j
布置成环形布置以形成定子组件1之后的情况。定子段s
i,j
在它们的横向侧25a、b处彼此附接,其中,定子段s
i,j
的第一横向侧25a通过正配合与相邻的定子段s
i,j
的第二横向侧25b连接。如图8中可见,线引导结构13沿周向方向彼此具有一定距离,即,在它们之间存在约20
°
的方位角距离。这是由于它们比定
子段s
i,j
更窄。换句话说,定子段s
i,j
横跨的方位角距离,其中n=9,而线引导结构13横跨小于例如围绕相应定子段s
i,j
的方位中心横跨
[0091]
图9示出了在组装连接线w
i,k
之后的情况。6条连接线w
i,k
在形状和长度上是相同的,并且可以通过机器同时或一个接一个地通过纯轴向运动被放置就位。例如,机器可以简单地在图9中“向下”轴向推动连接线w
i,k
,即,沿着定子轴线r向后进入负z方向。机器甚至不必改变其角位置,这是由于定子段s
i,j
的环形布置可以旋转以在完全相同的位置处从机器接纳下一连接线。第一连接线端部33a由此平行于第一线圈线端部5插入第一槽23a中的第一绝缘移位端子27a的第二凹部31中。类似地,第二连接线端部33b平行于第二线圈线端部7压入第二槽23b中的第二绝缘移位端子27b的第二凹部31中。由此,绝缘移位端子27a、b分别在第一连接线端部33a和第二连接线端部33b处切入连接线w
i,k
的绝缘覆层中,以便与相应的线圈线端部5、7建立电接触。
[0092]
图10示出了组装星点线16之后的情况,该星点线沿着定子段s
2,n
的线引导结构13的第三径向最向内路径13c延伸。星点线16比连接线w
i,k
更短,但具有更大的直径。其将三组定子段中的最后(j=n)定子段s
i,n
的线圈3在它们的第一线圈线端部5处相互连接。因此,星点线16包括三个星点端部,这三个星点端部被轴向地压入三组定子段中的定子段s
i,n
的第一槽23a中的第一绝缘移位端子27a的第二凹部31中。最后,为了实现如图1所示的完全组装的定子组件1,三相电力输入线17的三相17a、b、c被轴向压入第二绝缘移位端子27b的第二凹部31中,该第二凹部位于三组定子段中的相应的第一(j=1)定子段s
i,1
的第二槽23b中。
[0093]
9个单独且相同的线引导结构13的替代实施例在图11中示出。图11示出了线引导元件15,其限定了复数个线路径13a、b、c,这些线路径围绕定子轴线r以3n重旋转对称进行布置。线引导元件15基本上是将线引导结构13连接成单个结构的环形整体结构。代替如图7所示将单独的线引导结构13装配到定子段s
i,j
,根据图11的线引导元件15被装配至定子段s
i,j
的整个环形布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1