电驱动单元的制作方法
1.本公开涉及一种电驱动单元和一种运行该电驱动单元的方法。当前提出类型的电驱动单元可以在例如电动汽车的传动系统中找到应用。
背景技术:
2.传统的扭矩矢量化电动桥可以包括电动机、减速器和离合器。可以控制离合器上的压力,使得驱动扭矩的总大小在驱动桥之间分配,这也被表示为扭矩分配。例如,扭矩可在第一驱动半桥和第二驱动半桥之间分配,其中第一驱动半桥可以是左驱动半桥,而第二驱动半桥可以是右半轴,并且其中,每个驱动半桥可以驱动地连接或能驱动地连接至车辆车轮。
3.扭矩分配也可以表示为扭矩矢量化。处在第一驱动半桥和第二驱动半桥之间的所述扭矩矢量化,即是提供到第一驱动半桥的扭矩量与提供到第二驱动半桥的扭矩量之间的比率,可以根据当前驾驶情况(驱动情况)进行调节。主动的扭矩矢量化的优点可见于车辆的更稳健和稳定的驾驶特性。然而,一般而言提供扭矩矢量化的装置和/或方法相对复杂,并且倾向于包括大量的部件和/或步骤,这可能增加组装和/或运行期间发生故障的风险。
技术实现要素:
4.因此,需要具有扭矩矢量化功能、具有优选地低复杂度并且其可以以优选高效运行的电驱动单元。
5.该目标是通过根据独立权利要求的一种电驱动单元和一种运行该电驱动单元的方法来实现的。在从属权利要求中描述了特定实施例。示范性实施例如附图所示。
6.本发明的电驱动单元包括:定子,其构造成产生定子磁场;以及至少一个第一转子,其包括第一转子绕组,第一转子绕组优选地包括多相绕组。该电驱动单元还包括:至少一个第一逆变器,其与第一转子绕组电连接并且构造成在第一转子绕组中产生用于产生第一转子磁场的电流,其中,定子磁场构造成与第一转子磁场相互作用以在第一转子上施加扭矩。
7.当前提出的电驱动单元包括至少一个第一逆变器,其与第一转子绕组电连接并且构造成在第一转子绕组中产生用于产生第一转子磁场的电流,该事实允许利用与现有技术所知的电驱动单元相比特别高的效率和灵活性来控制该电驱动单元。例如,第一逆变器可以构造成在第一转子绕组中产生或生成用于产生第一转子磁场的电流,该电流基于电流驾驶情况来优化或调整。
8.定子磁场可以是具有旋转轴线和转速的旋转磁场。一般而言,转速也可以表示为旋转频率。定子磁场的旋转轴线可以基本平行于第一转子的旋转轴线来定向。第一转子可以被旋转地支承,并且可以构造成围绕旋转轴线旋转。
9.第一转子磁场可以是相对于转子旋转的旋转磁场。第一转子磁场可以围绕与第一转子的旋转轴线基本平行地定向的旋转轴线来旋转。第一转子磁场可以以等于旋转定子磁
场的转速或频率的转速或频率来旋转。第一转子可以以等于第一转子磁场的转速的转速来旋转。第一转子也可以以不同于第一转子磁场的转速的转速来旋转。
10.第一逆变器通常包括多个电力电子开关,并且构造成在第一转子绕组中产生或提供电流。由第一逆变器产生或提供的电流可以由一个或多个幅度、频率和相位来表征。
11.电驱动单元还可以包括第二转子,其包括第二转子绕组。优选地,第二转子绕组可以包括多相绕组。于是,电驱动单元还可以包括电连接至第二转子绕组的第二逆变器。于是,第二逆变器可以构造成在第二转子绕组中产生用于产生第二转子磁场的电流,并且于是定子磁场可以构造成与第二转子磁场相互作用以在第二转子上施加扭矩。第二逆变器通常包括多个电力电子开关,并且构造成在第二转子绕组中产生或提供电流。由第二逆变器产生或提供的电流可以由一个或多个幅度、频率和相位来表征。
12.定子磁场的旋转轴线可以基本平行于第二转子的旋转轴线来定向。第二转子可以被旋转地支承,并且可以构造成围绕第二转子的旋转轴线旋转。第一转子的旋转轴线和第二转子的旋转轴线可以以平行方式对齐或同轴地对齐。
13.第二转子磁场可以是相对于第二转子旋转的旋转磁场。第二转子磁场可以围绕与第二转子的旋转轴线基本平行地定向的旋转轴线来旋转。第二转子磁场可以以等于旋转定子磁场的转速或频率的转速或频率来旋转。第二转子可以以等于第二转子磁场的转速的转速来旋转。第二转子也可以以不同于第二转子磁场的转速的转速来旋转。
14.此外,第一转子和第二转子可以以相同的转速或者不同的转速旋转。例如,电驱动单元包括具有电连接至第一逆变器的第一转子和具有电连接至第二逆变器的第二转子和具有电连接至第二逆变器的第二转子和具有电连接至第二逆变器的第二转子,该电驱动单元特别是在困难的环境中(例如,当越野或不同路况下行驶时)可以作为差速器运行和/或可以提高车辆稳定性。
15.第一逆变器和第二逆变器在它们的设计和构造方面可以彼此等同或类似或者彼此不同。
16.电驱动单元还可以包括第一车轮和第二车轮。第一转子和第二转子可以轴向对齐,并且第一转子可以与第一车轮驱动地连接或者能驱动地连接。此外,第二转子可以与第二车轮驱动地连接或能驱动地连接。
17.例如,第一转子可以在第一车轮上施加扭矩,而第二转子可在第二车轮上施加扭矩。施加在第一个车轮上的扭矩可以不同于、等于或基本等于施加在第二车轮上的扭矩。第一转子和/或第二转子可以与车辆的转向系统连接或能连接。例如,电驱动单元可以用于驱动转向桥。这允许在例如在四轮驱动车辆或两轮驱动车辆中使用电驱动单元时具有很大的灵活性。
18.电驱动单元还可以包括第三逆变器。通常,定子包括定子绕组。定子绕组可以包括多相绕组。第三逆变器可以电连接至定子绕组。另外,第三逆变器可以构造成在定子绕组中产生用于产生定子磁场的电流。第三逆变器通常包括多个电力电子开关,并且构造成在定子绕组中产生或提供电流。由第三逆变器产生或提供的电流可以由一个或多个幅度、频率和相位来表征。
19.第一逆变器可以构造成在第一转子绕组中产生ac电流和/或dc电流,和/或第二逆变器可以构造成在第二转子绕组中产生ac电流和/或dc电流。提供ac电流和dc电流的能力
允许在类似或等同于异步电动机和/或同步电动机的运行的模式下运行电驱动单元。此外,与定子组合的第一转子可以在与定子组合的第二转子的模式不同或等同的模式下运行。在此和在下文中,短语“组合”一词指转子和定子之间的相互作用,或者更具体地,指第一转子磁场和/或第二转子磁场与定子磁场之间的相互作用,例如以在一个或两个转子上施加扭矩。
20.例如,与定子组合的第一转子和/或第二转子可以作为同步电动机或类似于同步电动机运行。同样地,与定子组合的第二转子和/或第一转子可作为感应电动机或类似于感应电动机运行,上述感应电动机包括处在旋转定子磁场与第一转子和第二转子的一个或两个之间的滑动件。例如,转子中与定子组合的一个可以作为同步电动机或类似于同步电动机运行,而与定子组合的另一个转子可作为感应电动机或类似于感应电动机运行。
21.例如,电驱动单元可以基于当前的驾驶情况灵活地运行。这使得电驱动单元具有较高的效率,特别是具有减少或最小化的损耗。
22.第一逆变器和/或第二逆变器可包括低电压逆变器。此外,第三逆变器可以包括高电压逆变器。高电压逆变器的最大运行电压大于低电压逆变器的最大运行电压。低电压逆变器的最大运行电压优选地至多60v或至多48v。高电压逆变器的最大运行电压优选地大于60v,大于200v或大于380v。低电压逆变器可以利用诸如mosfet(mosfet:金属氧化物半导体场效应晶体管)的电子部件制造,诸如mosfet的电子部件价格可以比诸如igbt的电子部件便宜,诸如igbt(igbt:绝缘栅双极晶体管)的电子部件可用于高电压逆变器中。例如电阻器、电容器、二极管、除mosfet或igbt以外的晶体管、保险丝、散热器、电绝缘件和导线或线缆的其它电子部件用于低电压逆变器也可能比用于高电压逆变器便宜,因为关于耗散电力和/或电力消耗的要求可能较少限制。低电压逆变器在物理尺寸上也可以比高电压逆变器小。因此,可以选择以最佳方式匹配所连接绕组的电力、电压和尺寸要求的合适的逆变器。
23.低电压逆变器和高电压逆变器两者都可以在一种或多个不同模式(例如在四象限模式或双象限模式下)下运行,在这些模式可以对所连接的绕组提供电力,并且在这些模式下可以从所连接的绕组接收电力。然而,也可以例如在单象限模式下运行逆变器,其中将电力提供到连接绕组。
24.电驱动单元可包括至少一个能量储存装置,诸如与第一逆变器电连接、优选地与第二逆变器和/或与第三逆变器电连接的一个或多个电池。电池中的一个或多个可再充电。例如,其中电池中的一个或多个可以包括锂电池和/或锂离子电池单体,其例如可以被电气地充电。在另一示例中,电池中的一个或多个可以包括燃料电池单体。例如,燃料电池可以通过氢的供应来充电。总体上,其它类型的电池是可能的,诸如非限制性示例、超级盖、锌碳电池或铅蓄电池。也可以设想,逆变器中的一个或多个被连接至电力发电机,诸如电动机或太阳能系统。
25.与定子组合的第一转子和/或与定子组合的第二转子可以作为构造成分别向第一逆变器和/或第二逆变器提供电力的电力发电机运行。同时,定子磁场可以分别与第一转子磁场和/或与第二转子磁场相互作用,以对第一转子和/或第二转子施加扭矩。此外,还可以将电力从定子提供到第三逆变器。
26.可选地,与定子组合的第一转子和/或与定子组合的第二转子和/或定子可以将电力提供到逆变器中的一个或多个,其可以例如将从定子和/或从转子中的一个或两个接收
的电力传输到至少一个能量储存装置。此外,第一转子、第二转子和定子中的不同一些个可以同时将电力提供到能量储存装置以及从能量储存装置接收电力,例如,如果或当与定子组合的一个转子作为发电机运行,而与定子组合的另一个转子作为电动机运行时。
27.从转子接收电力的逆变器可以电连接至向将电力提供至转子的逆变器。还可以设想,第一逆变器从第一转子接收电力,并且将电力提供到能量储存装置,而例如同时地第二逆变器从能量储存装置接收电力,并且将电力提供到第二转子。因此,电力可以从第一转子传递到第二转子。电力的传递也可以沿相反的方向进行,例如,经由第二逆变器、能量储存装置和第一逆变器从第二转子到第一转子。因此,电力可以从第一转子传递到第二转子,或从第二转子传递到第一转子。
28.与定子组合的第一转子可以作为发电机运行,和/或与定子组合的第二转子可以作为电动机运行。类似地,与定子组合的第一转子可以作为电动机运行,和/或与定子组合的第二转子可以作为发电机运行。也就是说,第一转子和第二转子可以作为电动机和/或发电机独立运行。当转子作为发电机运行时,转子可以同时将扭矩提供到车轮。这可以允许例如其中一个车轮减速并且另一个车轮加速的驾驶情况下,能量从转子中的一个传递到转子中的另一个。由于加速电力的至少一部分可以由减速电力来提供,因此电驱动单元可以以电力高效的方式运行。
29.电驱动单元的能量储存装置可以包括低电压能量储存装置。所述低电压能量储存装置可以与第一逆变器、并且优选地还与第二逆变器电连接电连接。电驱动单元的至少一个能量储存装置还可以包括高电压能量储存装置,其中所述高电压能量储存装置可以与所述第三逆变器电连接。
30.高电压能量储存装置的最大运行电压可以大于低电压能量储存装置的最大运行电压。优选地,高电压能量储存装置的最大运行电压大于60v、大于200v或大于380v,和/或低电压能量储存装置的最大运行电压至多60v,或至多48v。
31.一般而言,并且如上文在低电压逆变器和高电压逆变器的上下文中所述,由于较少限制的电力要求、电绝缘要求以及关于电气和机械部件的电力耗散要求的缘故,低电压能量储存装置可以比高电压能量储存装置便宜。因此,可以以最佳成本来选择匹配电压和尺寸要求的所连接的逆变器的合适电池。
32.电驱动单元还可以包括至少一个传感器,其构造成产生至少一个传感器信号。电驱动单元还可以包括至少一个控制器,其构造成控制第一逆变器,优选地还构造成控制第二逆变器和/或第三逆变器。该至少一个传感器信号和/或其值可以特定针对一个运行情况,例如车辆的驾驶情况。控制器可以构造成确定对该特定驾驶情况的适当响应,该响应将由车辆执行。控制器可以相应地控制第一逆变器和/或第二逆变器和/或第三逆变器,例如通过提供与由各个逆变器要提供的电流对应的适合的控制信号。
33.电驱动单元的至少一个传感器可以包括加速器致动器传感器、转向传感器、第一转子位置传感器和第二转子位置传感器中的一个或多个。第一转子位置传感器构造成获取指示第一转子的旋转位置的第一转子位置数据,而第二转子位置传感器构造成获取指示第二转子的旋转位置的第二转子位置数据。加速器致动器传感器构造成获取加速器致动器的状态,例如指示电驱动单元被请求提供的扭矩大小的加速器(油门)踏板的角度。转向传感器构造成获取转向的状态,例如对于其中可以设置电驱动单元的车辆的指示方向请求的方
向盘的角度。
34.例如,第一转子位置传感器和/或第二转子位置传感器可以利用键相量(key phasor)实施。基于由转子位置传感器提供的信号,可以例如以角度为单位来确定转子的旋转位置。此外,可以借助于数学微分方式从转子的旋转位置推断转子的转速。此外,基于观测器的方法可用于估计转子位置和/或转子转速。
35.可以设想使用其它传感器,例如提供视觉信息的传感器(例如照相机或光传感器)、距离传感器(例如雷达或超声波距离测量装置)、加速度传感器、振动传感器,或者,例如,雨水传感器或者测量湿度、温度和/或压力(例如气压)的传感器。指示发动机状态或车辆另一装置状态的传感器也可用作另外的传感器。这样的另外的传感器可以放置在隔室、底盘和/或发动机内和/或处。这些另外的传感器可以提供这样的信息,上述信息可用于检测驾驶情况和/或评估驾驶情况和确定由电驱动单元产生的适当响应。
36.可以在控制器内实施一个或多个控制算法。例如,控制器的一部分可以控制车辆动力学,诸如沿一个或多个平移和/或旋转方向的运动方向、速度和扭矩。控制器的另一部分可以确定由逆变器要提供的一个或多个电流,即第一逆变器和/或第二逆变器和/或第三逆变器,并且控制器的一部分可以控制逆变器以提供所确定的电流。控制器的另一部分可以控制由逆变器实际提供的电流的幅度和/或频率和/或相位的值。控制器的一部分也可能设置在逆变器内。因此,可以在适当的情况下集中或分散车辆内的控制运行。如果需要协调控制运行,则集中可能是有利的。如果控制器的一部分应当靠近车辆内的受控装置,则分散可能是有利的。
37.可以设想,控制器使消耗函数最小化或最小化具有约束的消耗函数,以确定一个或多个逆变器要提供的一个或多个电流的幅度和/或频率。这些值可以被视为效率、动力、电力和/或成本或这些的组合的最佳值。最小化可以借助于在控制器内实施的数学过程或算法来实现,例如借助于软件程序实现。一般而言也可以使用电子电路执行最小化,电子电路例如模拟计算机和/或可在fpga(fpga:现场可编程门阵列)或asic(asic:特定于应用的集成电路)中实现的数字电子电路。
38.该一个或多个控制算法可以包括矢量控制算法,也称为场定向控制。在矢量控制的情况下,形成由逆变器提供的电流有两个正交分量。两个正交分量,即磁化电流id和扭矩电流iq,可以例如,利用pi控制器和/或pid控制器来独立控制。
39.场定向控制可以提供这样的框架,其允许对电动机进行灵活和精确的控制。情况可以是磁化电流id和扭矩电流iq的独立控制允许简化所应用的控制算法。这种简化可以涉及控制电流幅度的电流控制器,并且其可以涉及要最小化的消耗函数。
40.在实施例中,电驱动单元的控制器构造成评估具有在绕组中的至少电流幅度作为输入的消耗函数。消耗函数还可以具有在定子绕组中的电流的频率作为输入。其还可以具有在第一转子绕组和/或第二转子绕组中的电流频率作为输入。控制器可以基于评估控制第一逆变器、第三逆变器和优选第二逆变器。电流可以包括由一个或多个逆变器提供的磁化电流id和/或扭矩电流iq。
41.可能的是消耗函数的函数值与和消耗函数的输入相关的欧姆损耗、铁损耗和/或逆变器损耗相互关联。为此,消耗函数还可以包括另外的参数。例如,消耗函数可以使用与用在电驱动单元和/或电驱动单元设计内的材料的特征特性相对应的另外的参数。对于材
料的特征特性的示例是转子绕组和/或定子绕组的欧姆电阻、容量、转子绕组和/或定子绕组的电感以及与电气设计单元中所用材料的磁化特性有关的参数,例如磁导率,其可能是非线性的。另外的参数可以涉及电驱动单元的部件的尺寸,例如层压金属板的厚度。此外,在一个或多个逆变器中的晶体管(例如mosfet或igbt)的开关特性、晶体管内的电阻值以及可用在逆变器内的脉冲宽度调制的开关频率是消耗函数的另外的参数的示例。此外,另外的参数还可以涉及当前运行情况,诸如第一转子的转速和/或第二转子的转速。消耗函数的函数值也可能与机械损失相关联,例如由于支承转子的轴承中的摩擦或与周围空气的摩擦,和/或与谐波损失相关联。
42.因此,可以这样设计消耗函数,包括目标参数,特别是包括与车辆整体和/或车辆的一个或多个部件的效率和/或损失有关的参数。
43.可以在消耗函数中处理消耗函数的输入。例如,该输入可以被平方。还可以是,利用可能与一个或多个另外的参数相关联的因子来加权被处理的输入,并且可以是将加权处理后的输入添加到消耗函数内,例如添加到另一加权处理后的输入。
44.在一个实施例中,可能的是控制器构造成控制逆变器以使消耗函数最小化。
45.消耗函数可以相对于输入最小化,例如相对于第一转子绕组和/或第二转子绕组和/或定子绕组中的电流最小化。可以在考虑等式和/或不等式约束的情况下实现最小化。相等约束例如可以是施加在第一转子上的扭矩和/或施加在第二转子上的扭矩。不相等约束例如可以是由一个或多个逆变器提供的最大电压和/或最大电流。
46.因此,可以将与当前驾驶情况相关的参数(例如扭矩和/或速度)包括到消耗函数中,并且可以寻找表示例如在当前驾驶情况下运行电驱动单元的最省电方式的消耗函数的最小值。
47.在一个实施例中,控制器构造成基于对消耗函数的评估、基于第一转子位置数据和/或基于第二转子位置数据来控制由第一逆变器在第一转子绕组中产生的电流的幅度及/或频率,并且优选地,来控制由第二逆变器在第二转子绕组中产生的的电流的幅度和/或频率。例如,控制器可以控制由第一逆变器产生的电流的幅度和/或频率和/或由第二逆变器产生的电流的幅度和/或频率,使得它们对应于消耗函数的最小值和/或考虑等式约束和/或不等式约束时的消耗函数的最小值。这可以引起电驱动单元的例如关于其电力消耗的有效运行。
48.控制器可以构造成控制第一逆变器和第三逆变器,并且优选地控制第二逆变器,使得由在旋转转子绕组中和在定子绕组中的电流产生的磁场相对于定子以相同的频率旋转。旋转转子绕组中的电流中的一个或多个可以是dc电流。也可以的是,旋转转子绕组中的电流中的一个或多个是ac电流。第一转子和/或第二转子的转速可以等于相应的转子磁场的旋转频率,并且因此等于定子磁场的旋转频率。然而,也可以的是第一转子和/或第二转子的转速不同于相应的转子磁场的旋转频率,并且因此不同于定子磁场的旋转频率。此外,可以的是第一转子的转速等于或不同于第二转子的转速。甚至可以设想,第一转子的速度独立于第二转子的速度,和/或反之亦然。如上所述可以清楚,电驱动单元在概念上非常灵活。存在与转子速度相关的各种运行模式(与相应的其它转子的速度和/或转子磁场相关),这允许车辆在各种可能的驾驶情况下高效运行。
49.控制器可以构造成确定要施加在第一转子上的第一目标扭矩t1和确定要施加在
第二转子上的第二目标扭矩t2。该确定可以基于当前的驾驶情况,并且可以附加地或者可选地基于例如可以利用传感器检测的驾驶员输入。例如,传感器可以是可以检测驾驶员的扭矩请求的加速器致动器传感器。类似地,例如在自动驾驶车辆的情况下,扭矩请求可以由技术装置(例如计算机)产生。此外,扭矩请求可以由作为控制器一部分的车速控制器产生。目标扭矩的确定还可以考虑方向信息,例如车辆正在转动到其中的方向和/或关于转向传感器的角度的信息,其可以对应于驾驶员关于驾驶方向的请求。驾驶方向也可以由技术装置(例如在自动驾驶情况下的控制器和/或计算机)确定,和/或由可以是控制器的一部分的车道辅助装置确定。
50.控制器可以构造成控制逆变器,例如在第一转子上施加处于第一目标扭矩t1的范围内的扭矩,并且在第二转子上施加处于第二目标扭矩t2的范围内的扭矩。由于扭矩、特别是目标扭矩t1和/或t2可以在使消耗函数最小化时用作约束,因此可以命令逆变器基本上提供具有所需的幅度和/或频率和/或相位的电流,以在第一转子和第二转子上产生由控制器确定的扭矩。
51.控制器可以构造成分别基于第一转子及第二转子的转速ω1、ω2来控制第三逆变器。转速也可以表示为旋转频率。控制第三逆变器可以包括控制由第三逆变器提供的电流的幅度、频率和相位。由第三逆变器提供的电流的幅度和频率可以是使消耗函数最小化的结果。由第三逆变器提供的电流的相位液也可以是使消耗函数最小化的结果。
52.绕组中的电流的幅度和频率通常与绕组中的电压相关,绕组例如第一转子绕组和/或第二转子绕组和/或定子绕组。由于一个或多个部件的物理限制或者电驱动单元的设计的缘故,绕组中的电压的幅度可能受到限制。这样的约束例如可以是预定的电压电平,类似于将电压和电流提供到相应绕组的逆变器中的一个或多个的dc链路电压电平。由于这种限制以及电压和电流之间的关系,电流的幅度和/或频率可以受到限制。当使消耗函数最小化时,可以考虑该约束例如作为关于电压和/或关于电流的约束。
53.控制器可以构造成控制第三逆变器,使得由定子绕组中的电流产生的旋转磁场的旋转频率在第一转子的旋转速度ω1和第二转子的旋转速度ω2之间。
54.控制器可以构造成控制第三逆变器,使得由定子绕组中的电流产生的旋转磁场的旋转频率小于第一转子的旋转速度ω1和第二转子的旋转速度ω2。并且还可以的是,控制器构造成控制第三逆变器,使得由定子绕组中的电流产生的旋转磁场的旋转频率大于第一转子的旋转速度ω1和第二转子的旋转速度ω2。
55.控制器可以构造成控制第三逆变器,使得由定子绕组中的电流产生的旋转磁场的旋转频率接近具有较大目标扭矩t1或t2的转子的旋转速度。例如,旋转定子磁场的旋转频率可以与提供或传输较大扭矩的转子的旋转速度或频率偏离至多5%、至多2%或至多1%。这样,经过第一和/或第二逆变器的电力传输可以受到限制。
56.控制器可以构造成控制第一逆变器,并且优选地,第二逆变器和/或第三逆变器,使得第一逆变器的操作参数的值和优选地第二逆变器和/或第三逆变器的操作参数的值的不超过预定的最大值。例如,从先前的解释中可以明显看出,这样的运行参数可以是提供到第一转子和/或第二转子和/或定子的绕组的电压和/或电流的幅度。这样的运行参数的其它示例可以是电流的频率和/或温度。这些运行参数可以单独考虑,也可以组合考虑。
57.上述电驱动单元的当前提出的运行方法可以包括以下一个或多个步骤:
[0058]-产生定子磁场,以及
[0059]-使用第一逆变器在第一转子绕组中产生用以产生第一转子磁场的电流,其中,定子磁场与第一转子磁场相互作用以在第一转子上施加扭矩。
[0060]
该方法可以包括以下步骤:
[0061]-使用第二逆变器以在第二转子绕组中产生用于产生第二转子磁场的电流,其中定子磁场与第二转子磁场相互作用以在第二转子上施加扭矩。
[0062]
该方法可以包括以下步骤中的一个或多个:
[0063]-轴向对齐第一转子和第二转子,
[0064]-将第一转子与第一车轮驱动地连接,或使第一转子与第一车轮能驱动地连接,
[0065]-将第二转子与第二车轮驱动地连接,或使第二转子与第二车轮能驱动地连接。
[0066]
该方法可以包括以下步骤中的一个或多个:
[0067]-将第三逆变器与定子绕组电气地连接,
[0068]-在定子绕组中产生用以产生定子磁场的电流。
[0069]
该方法可以包括以下步骤中的一个或多个:
[0070]-利用第一逆变器在第一转子绕组中产生ac电流和/或dc电流,
[0071]-利用第二逆变器在第二转子绕组中产生ac电流和/或dc电流。
[0072]
该方法可以包括以下步骤中的一个或多个:
[0073]-利用第一逆变器和/或第二逆变器,在第一转子绕组和/或第二转子绕组中产生与第一逆变器和/或第二逆变器的低运行电压有关的ac电流和/或dc电流,
[0074]-利用第三逆变器在定子绕组中产生与第三逆变器的高运行电压有关的ac电流和/或dc电流,
[0075]
其中,高电压逆变器的最大运行电压大于低电压逆变器的最大运行电压,其中,低电压逆变器的最大运行电压优选地至多60v或至多48v,和/或其中高电压逆变器的最大运行电压优选地大于60v、大于200v或大于380v。
[0076]
该方法可以包括以下步骤中的一个或多个:
[0077]-将第一逆变器电气地连接至能量储存装置,
[0078]-将第二逆变器电气地连接至能量储存装置,
[0079]-将第三逆变器电气地连接至能量储存装置。
[0080]
该方法可以包括以下步骤中的一个或多个:
[0081]-将第一逆变器电气地连接至低电压能量储存装置,
[0082]-将第二逆变器电气地连接至低电压能量储存装置,
[0083]-将第三逆变器电气地连接至低电压能量储存装置,
[0084]
其中,高电压能量储存装置的最大运行电压大于低电压能量储存装置的最大运行电压,其中,高电压能量储存装置的最大运行电压优选地大于60v、200v或380v,和/或其中,低电压能量储存装置的最大运行电压优选地至多60v或至多48v。
[0085]
该方法可以包括以下步骤中的一个或多个:
[0086]-生成至少一个传感器信号;
[0087]-控制第一逆变器,
[0088]-控制第二逆变器,
[0089]-控制第三逆变器,
[0090]
其中,可以基于至少一个传感器信号来控制第一逆变器和/或第二逆变器和/或第三逆变器。
[0091]
该方法可以包括以下步骤:获取指示第一转子的旋转位置的第一转子位置数据。
[0092]
该方法可以包括以下步骤:获取指示第二转子的旋转位置的第二转子位置数据。
[0093]
该方法可以包括以下步骤:推断第一转子的转速和/或第二转子的转速。例如,第一转子的旋转速度可以从第一转子的旋转位置来推断,并且第二转子的旋转速度可以从第二转子的旋转位置来推断。
[0094]
该方法可以包括以下步骤:获取指示电驱动单元被请求提供的扭矩大小的加速器致动器的状态。
[0095]
该方法可以包括以下步骤:确定指示方向请求的转向角度。
[0096]
该方法可以包括以下步骤中的一个或多个:
[0097]-评估具有至少绕组中的电流大小和定子绕组中的电流频率作为输入的消耗函数,
[0098]-基于评估控制第一逆变器、第三逆变器和优选第二逆变器。
[0099]
消耗函数的函数值可以与和消耗函数的输入相关的欧姆损耗、铁损耗和/或逆变器损耗相互关联。
[0100]
该方法可以包括以下步骤:控制第一逆变器、第二逆变器和第三逆变器中的一个或多个,以使消耗函数最小化。
[0101]
该方法可以包括以下步骤中的一个或多个:
[0102]-控制由第一逆变器生成的第一转子绕组中的电流的幅度和/或频率,
[0103]-优选地控制由第二逆变器生成的第二转子绕组中的电流的幅度和/或频率,
[0104]
上述控制基于消耗函数的评估和基于第一转子位置数据和/或基于第二转子位置数据。
[0105]
该方法可以包括以下步骤:控制第一逆变器和第三逆变器,并且优选地控制第二逆变器,使得由在旋转转子绕组中和在定子绕组中的电流产生的磁场相对于定子以相同的频率旋转。
[0106]
该方法可以包括以下步骤中的一个或多个:
[0107]-确定要施加在第一转子上的第一目标扭矩,
[0108]-确定要施加在第二转子上的第二目标扭矩,
[0109]-控制逆变器,以在第一转子上施加处于第一目标扭矩范围内的扭矩,
[0110]-控制逆变器,以在第二转子上施加处于第二目标扭矩范围内的扭矩。
[0111]
该方法可以包括以下步骤:分别基于第一转子及第二转子的转速ω1、ω2来控制第三逆变器。
[0112]
该方法可以包括以下步骤中的一个或多个:
[0113]-控制第三逆变器,使得由定子绕组中的电流产生的旋转磁场的旋转频率在ω1与ω2之间,
[0114]-控制第三逆变器,使得由定子绕组中的电流产生的旋转磁场的旋转频率小于ω1和ω2,
[0115]-控制第三逆变器,使得由定子绕组中的电流产生的旋转磁场的旋转频率大于ω1和ω2。
[0116]
该方法可以包括以下步骤:控制第一逆变器,并且优选地,第二逆变器和/或第三逆变器,使得第一逆变器的操作参数的值和优选地第二逆变器和/或第三逆变器的操作参数的值的不超过预定的最大值。
附图说明
[0117]
本文描述的附图示出了当前公开的主题的实施例,并且说明了本公开的所选原理和教导。在附图中:
[0118]
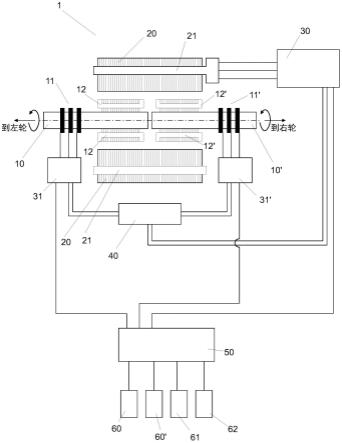
图1a示意性地示出了本文提出类型的具有定子和能量储存装置的电驱动单元的实施例,在定子中具有两个转子,
[0119]
图1b示意性地示出了当本文提出类型的电驱动单元的另一实施例,其中至少一个能量储存装置包括高电压能量储存装置和低电压能量储存装置,
[0120]
图2示意性地示出了图1a的电驱动单元的实施例,附加地图示了根据第一运行模式的、在电驱动单元中的电力传输,
[0121]
图3示意性地示出了图2的电驱动单元,附加地图示了根据第二运行模式的、在电驱动单元中的电力传输,以及
[0122]
图4示意性地示出了图1b的电驱动单元,附加地图示了根据第三运行模式的、在电驱动单元中的电力传输。
具体实施方式
[0123]
图1a示意性地示出了当前提出类型的电驱动单元1的实施例。电驱动单元1包括定子20,其包括定子绕组21。电驱动单元1还包括第一转子10,其具有第一滑环11和电连接至第一滑环11的第一转子绕组12。电驱动单元1还包括第二转子10’,其具有第二滑环11’和电连接至第二滑环11’的第二转子绕组12’。第一转子10和第二转子10’两者都设置在定子20内。第一转子10和第二转子10’被可旋转地支承并且构造成相对于定子20旋转。在图1a中,第一转子10和第二转子10’轴向对齐。
[0124]
即,在图1a中,电驱动单元1构造成内部转子机器。在本文未明确描述的另一实施例中,可以构造成外部转子机器,其中定子设置在或至少部分设置在第一转子和/或第二转子内。
[0125]
电驱动单元1还包括第一逆变器31和第二逆变器31’。第一转子绕组12经由第一滑环11电连接至第一逆变器31。类似地,第二转子绕组12’经由第二滑环11’电连接至第二逆变器31’。电驱动单元1还包括第三逆变器30。定子绕组21电连接至第三逆变器30。第一转子绕组12和/或第二转子绕组12’和/或定子绕组21可以包括多相绕组。
[0126]
第一逆变器31构造成对第一转子绕组12提供和/或从第一转子绕组12接收电流,例如dc电流和/或ac电流。第一逆变器31构造成使得电力可以例如从第一转子绕组12到第一逆变器31和/或从第一逆变器31到第一转子绕组12而在第一转子绕组12和第一逆变器31之间传输(transmit)。
[0127]
第二逆变器31’构造成对第二转子绕组12’提供和/或从第二转子绕组12’接收电
流,例如dc电流和/或ac电流。第二逆变器31’构造成使得电力可以例如从第二转子绕组12’到第二逆变器31’和/或从第二逆变器31’到第二转子绕组12’而在第二转子绕组12’和第二逆变器31’之间传输。
[0128]
第三逆变器30构造成对定子绕组21提供和/或从定子绕组21接收电流,例如dc电流和/或ac电流。第三逆变器30构造成使得电力可以例如从定子绕组21到第三逆变器30和/或从第三逆变器30到定子绕组21来传输。
[0129]
第一逆变器31、第二逆变器31’和第三逆变器30电连接至能量储存装置40。第一逆变器31和/或第二逆变器31’和/或第三逆变器30可以从能量储存装置40接收或对能量储存装置40提供电力。例如,能量储存装置40可以构造成或者可以包括电池或可充电电池。
[0130]
第一逆变器31构造成在第一转子绕组12中产生(generate)或生成(produce)电流,该电流产生或生成第一转子磁场。具体地,第一逆变器31和第一转子绕组12可以构造成使得第一转子磁场相对于第一转子10旋转。逆变器31’构造成在第二转子绕组12’中产生或生成电流,该电流产生或生成第二转子磁场。具体地,第二逆变器31’和第二转子绕组12’可以构造成使得第二转子磁场相对于第二转子10’旋转。第三逆变器30构造成在定子绕组21中产生或生成电流,该电流产生或生成定子磁场。具体地,第三逆变器30和定子绕组21可以构造成使得定子磁场相对于定子20旋转。每个旋转着的磁场的大小和/或相位可以不同于/等于其它旋转磁场的大小和/或相位。
[0131]
定子磁场可以与第一转子磁场相互作用以对第一转子10提供扭矩。此外,定子磁场可与第二转子磁场相互作用以对第二转子10’提供扭矩。施加在第一转子10和/或第二转子10’上的扭矩可能导致第一转子10和/或第二转子10’在每种情况下,例如经由驱动桥或驱动半桥来转动并且将扭矩传输至车轮。
[0132]
第三逆变器30可以构造成例如在再生制动期间从定子绕组21接收电力。该电力随后可以传输到并且储存在能量储存装置40中。附加地或替代地,第一逆变器31和/或第二逆变器31’可以构造成例如在再生制动期间分别从第一转子绕组12和/或从第二转子绕组12’接收电力。
[0133]
图1a的电驱动单元1还可以包括第一转子位置传感器60和第二转子位置传感器60’,第一转子位置传感器60用于检测第一转子的旋转位置,第二转子位置传感器60’用于检测第二转子10’的旋转位置。第一转子的转速可以通过数学地微分第一转子10相对于时间的旋转位置来确定。类似地,第二转子的转速可以通过数学地微分第二转子10’相对于时间的旋转位置来确定。图1a的电驱动单元1还可以包括加速器致动器传感器61和转向传感器62,加速器致动器传感器61用于检测指示驾驶员的扭矩要求的加速器致动器的位置,转向传感器62用于检测指示由驾驶员设定的车辆移动的目标方向的转向角度。在某些情况下,例如在自动驾驶期间和/或当使用控制器(例如车道辅助控制器和/或速度控制器)时,目标方向和/或目标速度可以由可以使用算法来执行该任务的计算装置来确定。在这种情况下,可能不需要该一个或多个传感器。例如,上述传感器可以是语音识别系统、交互式示出器、操纵杆、鼠标或提供人机界面的任何其它装置的一部分或者可以包括这些。
[0134]
图1a中的电驱动单元1还包括控制器50。控制器50例如可以包括微控制器或另一种计算装置,例如fpga、微处理器、计算机等。控制器50可以集成到车辆的电子控制单元(ecu)中。在图1a所示的实施例中,控制器50例如经由光接口和/或电接口通信地连接至第
一逆变器31、至第二逆变器31’以及至第三逆变器30。并且控制器50还经由例如光接口和/或电接口通信地连接至传感器中的至少一个,例如连接至转子位置传感器60和/或60’,至加速器致动器传感器61和/或至转向传感器62。
[0135]
控制器50可以构造成例如基于从传感器60、60’、61和62中的一个或多个接收到的信号、数据或信息以确定要施加在第一转子10上的目标扭矩t1和/或以确定要施加在第二转子10’上的目标扭矩t2。
[0136]
控制器50可以构造成控制第一逆变器31、第二逆变器31’和第三逆变器30。控制器50可以包括其中实施处理传感器信号的方法的一部分。例如,基于从传感器60、60’、61和62中的一个或多个接收到的信号、数据或信息,控制器50可以构造成确定或计算要施加在转子10、10’中的一个或两个上的扭矩。并且,基于要施加在一个或两个转子10、10’上的扭矩,控制器50可以构造成确定或计算定子绕组21和/或第一转子绕组12和/或第二转子绕组12’中产生或生成的电流的幅度和/或频率和/或相位,以将所述扭矩施加在一个或两个转子10、10’上。随后,控制器50还可以构造成控制第一逆变器31和/或第二逆变器31’和/或第三逆变器30,例如t,以在定子绕组21和/或第一转子绕组12和/或第二转子绕组12’中产生或生成具有先前确定或计算的幅度和/或频率和/或相位的电流,以将先前确定的或计算的或要求的扭矩施加在一个或两个转子10,10’上。
[0137]
例如,控制器50可以构造成基于由第一转子位置传感器60提供的信号和/或基于由第二转子位置传感器60提供的信号来确定转子10、10’之一的旋转位置和/或转速。于是,控制器50可以进一步构造成确定由第一逆变器31在第一转子绕组12中要产生或生成的电流的幅度和/或频率和/或相位。并且控制器50可以构造成控制第一逆变器31,以诸如在第一转子绕组12中产生或生成先前确定的电流。类似地,控制器50可以构造成确定由第二逆变器31’在第二转子绕组12’中要产生或生成的电流的幅度和/或频率和/或相位。并且控制器50可以构造成控制第二逆变器31’,以诸如在第一转子绕组12中产生或生成先前确定的电流。此外,控制器50可以构造成确定由第三逆变器30在定子绕组21中要产生或生成的电流的幅度和/或频率和/或相位。随后控制器50还可以进一步构造成控制第三逆变器30,以便在定子绕组21中产生或生成先前确定的电流。
[0138]
作为非限制性示例,根据图1a的实施例的控制器50可以构造成实施场定向控制方案。场定向控制也称为矢量控制。例如,控制器50可以构造成将定子绕组21中的电流对应于旋转的定子磁场而数学地映射到包括iq轴和与iq轴正交的id轴的固定正交坐标框系上,其中iq和id分别对应于两个正交电流分量(component):扭矩电流iq和磁化电流id。于是,控制器50还可以构造成将定子绕组21中的电流映射到固定正交坐标系的iq轴上。控制器还可以构造成将第一转子绕组12中的电流和第二转子绕组12’中的电流映射到同一个固定正交坐标系上,其中转子绕组12、12’内的每个电流被分配为扭矩电流iq分量和磁化电流id分量。可以使用旋扭矩阵来执行数学映射,该旋转矩阵可以包括旋转磁场的旋转角度作为参数。在固定正交坐标系中,定子绕组21中的电流表示为i
sq
,第一转子10的控制电流和磁化电流分别表示为i
r1q
和i
r1d
,而第二转子10’的扭矩电流和磁化电流分别表示为i
r2q
和i
r2d
。在电流控制中使用固定正交坐标系可以简化计算和电驱动单元1的控制。可以使用例如基于分别由第一转子位置传感器60和第二位置传感器60’提供的信号、数据或信息的第一转子10的旋转位置和第二转子10’的旋转位置来完成第一转子绕组12中的电流和第二转子绕组12’中
的电流的映射。
[0139]
于是,控制器50可以构造成通过使消耗函数最小化来计算在第一转子绕组12和/或第二转子绕组12’和/或定子绕组21中要产生或生成的电流的大小、频率和相位。例如,消耗函数可以包括这样的和,该和包括一个或多个电流的平方大小。例如,消耗函数p可以定义为
[0140]
p=1.5
·rs
·i2sq
+1.5
·rr
·
(i
2r1q
+i
2r1d
+i
2r2q
+i
2r2d
)
ꢀꢀꢀ
(式1)
[0141]
其中,rs是定子绕组21的欧姆电阻,而rr是第一转子绕组12和/或第二转子绕组12’的欧姆电阻。该消耗函数包括定子绕组21以及第一转子绕组和第二转子绕组12、12’内的欧姆损耗。因此,使该消耗函数最小化并且控制第一逆变器31和/或第二逆变器31’和/或第三逆变器30可以显著增加电驱动单元1的效率。
[0142]
对于第一转子10的给定转速ω1、第二转子10’的给定转速ω2、第一转子10的给定目标扭矩t1以及第二转子10的给定目标扭矩t2,消耗函数p可最小化。当使消耗函数最小化时,目标扭矩t1和t2可以被认为等同的限制。转速ω1和ω2可以基于由转子位置传感器60和60’提供到控制器50的信号、数据或信息来确定。控制器50可以构造成基于这样的驾驶情况来确定目标扭矩t1和t2,该驾驶情况可能与传感器60、60’、61和/或62中的一个或多个提供的信号、数据或信息相关。此外,控制器可以构造成基于车辆动力学来确定目标扭矩t1和t2,例如基于包括车辆质量、惯性矩、摩擦、弹性力、刚度和进一步材料参数的一个或多个参数。
[0143]
例如,在图1a所示的电驱动单元的实施例中,目标扭矩t1和t2可以根据以下关系式而与电流相关
[0144]
t1=1.5
·np
·
lm·ir1d
·isq
ꢀꢀꢀ
(式2)
[0145]
t2=1.5
·np
·
lm·ir2d
·isq
ꢀꢀꢀ
(式3),
[0146]
其中n
p
表示若干对极对,而lm表示转子10、10’的电感,其中电感指连接定子和转子的磁场。
[0147]
使消耗函数p最小化的进一步限制可以包括一个或多个绕组12、12’、21和/或一个或多个逆变器30、31、31’中的最大允许电流大小和/或最大允许电压。
[0148]
例如,与电流有关的限制可以由但不限于以下关系式来表示
[0149]i2r1q
+i
2r1d
≤i
2r1max
ꢀꢀꢀ
(式4)
[0150]i2r2q
+i
2r2d
≤i
2r2max
ꢀꢀꢀ
(式5)
[0151]
|i
sq
|≤i
sqmax
ꢀꢀꢀ
(式6),
[0152]
其中i
r1max
表示第一转子绕组12中电流的最大值,i
r2max
表示第二转子绕组12’中电流的最大值,而i
sqmax
表示定子绕组21中电流的最大值。类似地,与电压有关的限制可以由但不限于以下关系式来表示
[0153]v2sq
+v
2sd
≤v
2smax
ꢀꢀꢀ
(式7)
[0154]v2r1q
+v
2r1d
≤v
2r1max
ꢀꢀꢀ
(式8)
[0155]v2r2q
+v
2r2d
≤v
2r2max
ꢀꢀꢀ
(式9).
[0156]
其中,参考固定正交坐标系
[0157]-v
sq
是定子绕组21沿i
sq
轴方向的电压分量,
[0158]-v
sd
是定子绕组21沿i
sd
轴方向的电压分量,
[0159]-v
smax
是定子绕组的最大电压,
[0160]-v
r1q
、v
r2q
分别是第一转子绕组12和第二转子绕组12’沿i
sq
轴方向的电压分量,
[0161]-v
r1d
、v
r2d
分别是第一转子绕组12和第二转子绕组12’沿i
sd
轴方向的电压分量,以及
[0162]-v
r1max
、v
r2max
分别是第一转子绕组12和第二转子绕组12’中的最大电压。
[0163]
最大电压v
r1max
、v
r2max
和v
smax
可以取决于第一逆变器31、第二逆变器31’和第三逆变器30的特性。另外地或替代地,它们可以取决于绕组12、12’和21的特性,例如取决于关于电绝缘系统的特性。v
2r1max
可能等于v
2r2max
。
[0164]
此外,绕组12、12’和21中的电压v与绕组12、12’和21中的电流i在物理上相关,例如根据以下关系式
[0165]
v=l
·
di/dt,
[0166]
其中d/dt表示对时间的导数,而l分别是绕组12、12’和21的电感。电压v的大小可以取决于电流i的大小。在电流是ac电流的情况下,电压还可以取决于电流的频率。因此,控制器50还可以构造成利用电流的频率作为输入参数和/或作为优化参数来优化消耗函数p。
[0167]
控制器50可以构造成使用数学方法来使消耗函数最小化,数学方法例如包括计算导数并且求出其零值。控制器50还可以构造成使用其它优化算法(例如梯度下降算法等)来使消耗函数最小化。可以关于消耗函数的一个或多个参数来执行最小化,参数包括例如电流i
2sq
、i
2r1q
、i
2r1d
、i
2r2q
、和i
2r2d
的频率和/或大小。
[0168]
作为优化的结果,控制器50可以控制第三逆变器30,使得定子磁场以接近转子10、10’中传输更大的扭矩t1或t2的一个的速度的旋转频率来旋转。例如,定子磁场的旋转频率可以与传输较大扭矩的转子的旋转频率偏离小于
±
5%,优选小于
±
2%,最优选小于
±
1%。这样,经过第一逆变器和/或第二逆变器的电力流可以受到限制。
[0169]
图1a的电驱动单元1的一个优点是灵活性,利用该灵活性,第一转子绕组和第二转子绕组12、12’以及定子绕组21中的电流可以被控制。例如,电驱动单元1的转子绕组12、12’中的电流可以以类似于同步机和类似于感应机的方式运行。绕组12、12’、21中的电流可以被控制,以使消耗函数最小化,该消耗函数可包括与电驱动单元1的效率有关或相关的项,诸如电力消耗。此外,在定子20内设置两个转子10、10’,这表现出电驱动单元1的设计特别紧凑,因为仅一个定子用于两个转子。此外,施加在两个转子10、10’上的总扭矩以及施加在第一转子10上的扭矩量与施加在第二转子10’上的扭矩量之间的比率可以利用高灵活性和电源效率来控制。
[0170]
图1b示意性地示出了作为图1a所示实施例的变型的电驱动单元1的替代实施例。在此以及在下文的所有附图中,不同附图所示的重复特征用相同的附图标记表示。根据图1b的电驱动单元与根据图1a的电驱动单元的不同之处在于,在根据图1b的电驱动单元中,能量储存装置40包括高电压能量储存装置40a和低电压能量储存装置40b。高电压能量储存装置40a被电连接至逆变器30。低电压能量储存装置40b被电连接至第一逆变器31和第二逆变器31’。因此,第一逆变器和第二逆变器31、31’是低电压逆变器,而第三逆变器是高电压逆变器。低电压逆变器被设计成在低电压下运行。高电压逆变器被设计成在高电压下运行。例如,高电压能量储存装置40a和高电压逆变器30可以构造成在最大电压为或低于至少60v、至少200v或至少380v的电压下运行。并且低电压能量储存装置40b和低电压逆变器31、31’可以构造成在最大电压为或低于至多48v或至多60v的电压下运行。
[0171]
例如,高电压可适于用在主电力路径中,主电力路径可包括定子绕组21、第三逆变器30和高电压能量储存装置40a。另一方面,能够抵抗高电压的部件通常比仅抵抗低电压的部件更昂贵。低电压部件可以包括例如场效应晶体管,诸如金属氧化物半导体场效应晶体管(mosfet),而高电压部件可以包括例如绝缘栅双极晶体管(igbt)。此外,安全约束对低电压部件的限制通常较少,使得降低生成和维护成本。
[0172]
因此,在可能的情况下使用低电压组件通常是有利的。对于第一转子10和对于第二转子10’,对于第一逆变器31和对于第二逆变器31’,可能是这种情况。例如,在图1b的电驱动单元1的实施例中,低电压能量储存装置40b经由第一逆变器31和第二逆变器31’连接至第一转子10和第二转子10’。
[0173]
图2再次示意性地示出了在下第一驾驶情况的图1a的电驱动单元1。为便于说明,仅省略了控制器50和传感器60、60’、61和62,并且示出了表示电力传输路径的附加箭头。例如,如果或当两个转子10、10’以相同的速度旋转,并且如果或当相同的扭矩被施加至两个转子10、10’时,可能会出现图2所示的情况。在这种情况下,控制器50可以控制第三逆变器30,使得旋转定子磁场的转速等于转子10、10’关于定子20的机械转速。也就是说,控制器50可以控制第三逆变器30,使得在定子绕组21中产生或生成的电流的频率等于第一转子10和第二转子10’的机械转速或频率。控制器50控制第一逆变器31和第二逆变器31’,使得它们分别将直流电提供到第一转子绕组12和第二转子绕组12’。因此,电驱动单元1可示出同步电动机的特性,其中两个转子10和10’与定子磁场同步或一致地旋转。在图2中,电力分别经由第一转子绕组12和第二转子绕组12’而从能量储存装置40到第三逆变器30、从第三逆变器30到定子绕组21、从定子绕组21到转子10、10’来传输。例如,第一转子10和第二转子10’于是可以将扭矩传输到第一车轮和第二车轮。
[0174]
图3再次示意性地示出了在下第二驾驶情况的图1a的电驱动单元1。同样,为便于说明,省略了控制器50和传感器60、60’、61和62,并且示出了表示电力传输路径的附加箭头。图3所示的不同尺寸的箭头说明传输到第一转子10的电力不同于传输到第二转子10’的电力特别地,在图3所示的情况下,传输到第一转子10的电力大于传输到第二转子10’的电力。
[0175]
例如,如果或当两个转子10,10’以相同的速度旋转,并且如果或当施加到第一转子10的扭矩不同于施加到第二转子10’的扭矩时(例如当联接到第一转子10和第二转子10’的车轮在不同的土壤类型上行驶时),可能出现图3所示的驾驶情况。在图3中,施加到第一转子10的扭矩大于施加到第二转子10’的扭矩。
[0176]
在图3所示的情况下,控制器50可以控制第三逆变器30,使得旋转定子磁场的转速等于转子10、10’的机械转速。也就是说,控制器50可以控制第三逆变器30,使得提供到定子绕组21或在定子绕组21中产生的电流的频率等于转子10、10’的转速或旋转频率。控制器50控制逆变器31、31’,使得它们分别将直流电提供到第一转子绕组12和第二转子绕组12’。不同扭矩量被施加到第一转子10和第二转子10’的事实通过分别由第一逆变器31和第二逆变器31’提供到转子10、10’的直流电流的不同大小来反映。在图3所示的情况下,电驱动单元1可以类似于同步电动机,其中两个转子10和10’与定子磁场同步或一致地旋转。
[0177]
在图3中,电力分别经由第一转子绕组12和第二转子绕组12’而从能量储存装置40(其可以包括高电压能量储存装置40a和低电压能量储存装置40b)到第三逆变器30、从第三
逆变器30到定子绕组21、从定子绕组21到转子10、10’来传输。例如,第一转子10和第二转子10’于是可以将扭矩传输到第一车轮和第二车轮。与图2所示的情况相反,在图3所示的情况中,传输到第一转子10’的电力与传输到第二转子10’的电力不同,导致施加在第一转子10和第二转子10’上的扭矩量不同。
[0178]
图4再次示意性地示出了图2和图3中的电驱动单元1,其中附加的箭头表示电力传输。图4涉及这样的驾驶情况,其中第二转子10’的转速大于第一转子10的转速,并且经由定子20施加或传输到第一转子10的扭矩等于经由定子20施加或传输到第二转子10’的扭矩。
[0179]
控制器50确定旋转定子磁场的转速。控制器50命令第三逆变器30将电流提供到定子绕组21,产生具有这样的旋转频率的旋转定子磁场,该旋转频率对应于处在第一转子10的转速与第二转子10’的转速之间的转速。在这种情况下,第一转子10和定子20将扭矩提供到第一车轮。同时,第一转子10作为发电机运行,经由第一逆变器31将电力提供到能量储存装置40、具体是到低电压能量储存装置40b。同样,在图4中,第一逆变器31可以构造成低电力逆变器。同时,第二转子10’和定子20将扭矩提供到第二车轮。第二转子10’经由第二逆变器31’从能量储存装置40、特别是从低电压能量储存装置40b接收电力。同样,在图4中,第二逆变器是31’可以构造成低电力逆变器。这时定子20将相同的电力传输到转子10和10’。
[0180]
当定子20将不同的扭矩施加或传输到转子10和10’两者时,从定子20传输到转子10、10’的电力将相应改变。在这种情况下,控制器50可以构造成控制第三逆变器30以在定子绕组21中产生或生成电流,该电流产生具有这样的旋转频率的旋转定子磁场,旋转频率接近传输更大的扭矩的转子的旋转速度或在其范围内或在其预定范围内,以限制经过低电力逆变器31和31’传输的电力。
[0181]
附图标记列表:
[0182]1ꢀꢀꢀꢀꢀꢀꢀ
电驱动单元
[0183]
10
ꢀꢀꢀꢀꢀꢀ
第一转子
[0184]
10
’ꢀꢀꢀꢀ
第二转子
[0185]
11
ꢀꢀꢀꢀꢀꢀ
第一滑环
[0186]
11
’ꢀꢀꢀꢀ
第二滑环
[0187]
12
ꢀꢀꢀꢀꢀꢀ
第一转子绕组
[0188]
12
’ꢀꢀꢀꢀ
第二转子绕组
[0189]
20
ꢀꢀꢀꢀꢀꢀ
定子
[0190]
21
ꢀꢀꢀꢀꢀꢀ
定子绕组
[0191]
30
ꢀꢀꢀꢀꢀꢀ
第三逆变器
[0192]
31
ꢀꢀꢀꢀꢀꢀ
第一逆变器
[0193]
31
’ꢀꢀꢀꢀ
第二逆变器
[0194]
40
ꢀꢀꢀꢀꢀꢀ
能量储存装置
[0195]
40a
ꢀꢀꢀꢀꢀ
高电压能量储存装置
[0196]
40b
ꢀꢀꢀꢀꢀ
低电压能量储存装置
[0197]
50
ꢀꢀꢀꢀꢀꢀ
控制器
[0198]
60,60
’ꢀ
转子位置传感器
[0199]
61
ꢀꢀꢀꢀꢀꢀ
加速器致动器传感器
[0200]
62
ꢀꢀꢀꢀꢀꢀ
转向传感器
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1