一种轨道障碍物清洁装置的制作方法
1.本发明涉及电缆清理技术领域,尤其涉及一种轨道障碍物清洁装置。
背景技术:
2.电力系统由发电、输电、变电、配电、用电设备及相应的辅助系统组成的电能生产、输送、分配、使用的同一整体。电力系统采用高压输电线路与高压配电线路组合将电力输送至企业、公共场所及百姓家庭。而高压输电线路与高压配电线路再城市或城郊架设时,除了需要承受自然环境的影响还要面对生活环境下带来的干扰。
3.随风飘起的塑料袋、意外缠绕的风筝、高层的意外落下的垃圾等,这些生活中为电缆带来的物料垃圾不仅会影响电缆的寿命,也会早成多电缆缠绕引发事故。高架电缆障碍物清理是高风险工作,同时现有无人机技术清楚障碍物的方式对电缆会造成不可修复的损坏。因此我们希望基于电缆轨道建立可行走的障碍物清理装置。而实际轨道障碍物包括电缆搭建或维护时形成造成电缆的不光滑的不可清扫障碍物与粘附与电缆上不便清理且容易造成事故的可清扫障碍物。因此我们设计提供了可识别障碍物进行翻越或清扫的一种轨道障碍物清洁装置
技术实现要素:
4.本发明的目的是为了解决上述背景技术中提及的问题而提出的一种轨道障碍物清洁装置。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种轨道障碍物清洁装置,包括:配电机箱、行走单元、清扫机构;
7.所述配电机箱内部安装集成pcl编程系统的控制器、供电模块及总线模块;
8.所述行走单元安装于配电机箱上方与高架电缆接触并在其上行走越障;
9.所述清扫机构安装于行走单元一侧,工作时位于行走单元前侧,对障碍物清理;
10.所述配电机箱侧边安装有支架,所述支架向上延伸至配电机箱顶部位置,两个所述支架呈中心对称设置并分别与行走单元及清扫机构连接;
11.所述配电机箱顶面中部安装有控线机构。
12.优选的,所述行走单元包括上部行走机构、下部支撑杆机构;所述上部行走机构安装于,所述支架安装于配电机箱顶面,所述上部行走机构与下部支撑杆机构再同一竖直方向对电缆夹持。
13.优选的,所述上部行走机构包括滚轴架、滚轴、第一伺服电机、传动带;
14.所述滚轴架采用双层挡板设置且挡板之间留有间隙,多个所述滚轴采用环形阵列方式分布在滚轴架一侧,所述滚轴的轴承贯穿滚轴架并与其转动连接,多个所述在滚轴架中部被传动带同步转动方式连接,所述第一伺服电机与其中一个轴承连接固定;所述滚轴架中部连接有转轴,所述转轴端部固定连接有第二伺服电机,所述第二伺服电机安装于支架上。
15.优选的,所述下部支撑杆机构包括第一弧形槽、支撑板、第三伺服电机;
16.所述支撑板通过转动座安装于配电机箱顶部,所述第一弧形槽安装于支撑板顶部侧边,所述第三伺服电机安装于配电机箱顶部并与支撑板底部连接固定。
17.优选的,所述清扫机构包括包括切割部件、u型架;
18.所述u型架中部用于电缆穿过并与其间隙配合,所述切割部件呈u型分布安装于u型架的侧边,所述u型架通过支杆与支架连接。
19.优选的,所述控线机构包括固定座、立柱、滑杆、弹簧、第二弧形槽;
20.所述固定座安装于配电机箱顶面中部,两个所述立柱对称固定于固定座顶面,所述立柱顶面向下开设有限位孔,所述滑杆安装于限位孔内部其局部向外延伸出去,两个所述滑杆顶部均固定于第二弧形槽的底部,所述弹簧安装于立柱顶部并与第二弧形槽连接固定,所述滑杆设于弹簧内部。
21.与现有技术相比,本发明提供了一种轨道障碍物清洁装置,具备以下有益效果:
22.(1)本申提供了一种轨道障碍物清洁装置,采用配电机箱连接行走单元与清扫机构,行走单元与电缆连接并沿其行走并可翻越不可清扫障碍物,清扫机构安装于行走单元前侧可对可清扫障碍物进行提前清扫处理。
23.(2)本发明设计提供了组合式的行走单元,通过上部行走机构与下部支撑杆机构的配合对电缆进行包裹并沿其行走,上部行走机构与下部支撑杆机构均为活动可调节机构对于在电缆上的拆放更加方便。
24.(3)本发明中上部行走机构,采用滚轴架连接多个滚轴,以滚轴作为电缆上夹持件,依靠滚轴转动实现行走,或依靠滚轴架实现障碍物翻转,实现本装置在电缆上的高效畅通。
25.(4)本发明中建立控线机构,采用立柱与滑杆配合弹簧活动支撑第二弧形槽,对第二弧形槽进行调大倾斜度和加深槽深设置,利用第二弧形槽包裹电缆,对线缆进行限位防护,增加本装置行走的稳定,第二弧形槽两端倾斜体与不可清扫障碍物接触进行压缩过渡,避免卡死,加深的第二弧形槽可是颠簸状态下的电缆能够充分被罩住,维持本装置的稳定。
26.(5)本发明中清扫机构中采用第一刀片和锯齿刀片错位叠加配合设置,让两个锯齿刀片对称固定在第一刀片两侧,提高对障碍物剪切的撕裂强度,可以对电缆上可清扫障碍物进行快速清理。
附图说明
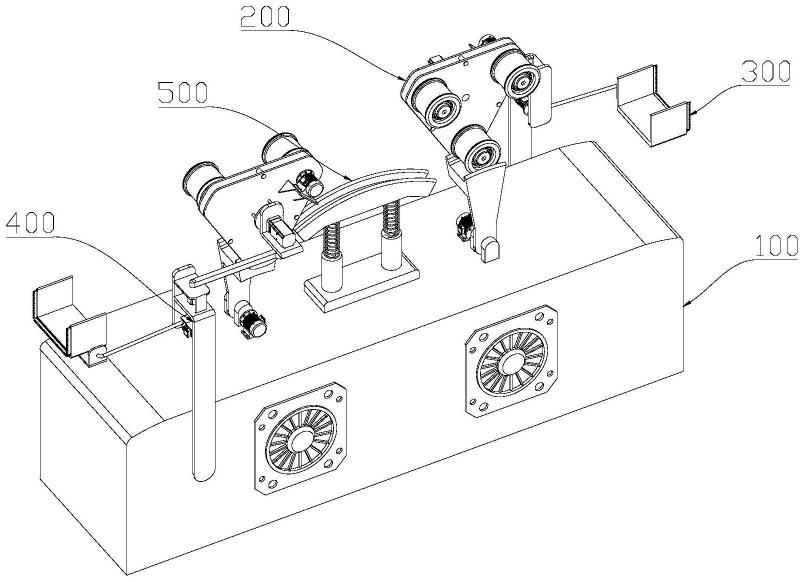
27.图1为本发明的整体立体结构示意图;
28.图2为本发明的整体前视结构示意图;
29.图3为本发明的上部行走机构与下部支撑杆机构拆分结构示意图;
30.图4为本发明的上部行走机构侧视结构示意图;
31.图5为本发明的一个立柱前侧剖面后控线机构整体结构示意图;
32.图6为本发明的清扫机构整体结构示意图;
33.图7为本发明的图6中a处放大结构示意图。
34.图号说明:100、配电机箱;200、行走单元;201、上部行走机构;202、下部支撑杆机构;203、滚轴架;204、滚轴;205、第一伺服电机;206、传动带;207、第二伺服电机;208、第一
弧形槽;209、支撑板;210、第三伺服电机;300、清扫机构;301、切割部件;302、u型架;303、第一刀片;304、锯齿刀片;400、支架;500、控线机构;501、固定座;502、立柱;503、滑杆;504、弹簧;505、第二弧形槽;506、限位孔。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
36.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.实施例1:
38.请参阅图1-7,一种轨道障碍物清洁装置,包括配电机箱100、行走单元200、清扫机构300;
39.配电机箱100内部安装集成pcl编程系统的控制器、供电模块及总线模块;
40.行走单元200安装于配电机箱100上方与高架电缆接触并在其上行走越障;
41.清扫机构300安装于行走单元200一侧,工作时位于行走单元200前侧,对障碍物清理;
42.配电机箱100侧边安装有支架400,支架400向上延伸至配电机箱100顶部位置,两个支架400呈中心对称设置并分别与行走单元200及清扫机构300连接;
43.配电机箱100顶面中部安装有控线机构500。
44.下面结合附图,对本技术的一些实施方式作详细说明:
45.请参阅1-2图,在本技术实施例中,集成pcl编程系统的控制器、供电模块及总线模块等组成的控制单元均安装于配电机箱100内部,行走单元200与清扫机构300安装于配电机箱100上方,行走单元200与高架电缆接触配合并在其上方行走,清扫机构300设于行走单元200一侧,工作时行走与行走单元200前侧,对障碍物清理。
46.上述中的障碍物包括可清扫障碍物和不可清扫障碍物,可清扫障碍物为粘附与电缆上不便清理且容易造成事故的垃圾,不可清扫障碍物为电缆搭建或维护时形成,造成电缆的不光滑;本技术行走单元200用于在电缆上稳定移动,并可翻越不可清扫障碍物,清扫机构300安装于行走单元200前侧可对可清扫障碍物进行提前处理。
47.请参阅图3-4,在本技术实施例中,行走单元200包括上部行走机构201与下部支撑杆机构202,上部行走机构201与下部支撑杆机构202呈夹持状设于电缆的上线端并将其包裹。
48.其中,下部支撑杆机构202包括第一弧形槽208、支撑板209、第三伺服电机210;支撑板209底端固定在转动座上,将转动座与其内部配电机箱100顶部后,其中第三伺服电机210控制转动座的转杆,可实现支撑板209的转动,第一弧形槽208安装于支撑板209顶部侧边。
49.在具体实施中,上述的第一弧形槽208在90
°
夹角范围内进行调节,使其竖直立起或水平躺下;其中,在竖直立起状态时,第一弧形槽208作为电缆的下夹持件,在水平躺下
时,第一弧形槽208进行了收纳,也可让本装置由电缆上卸下。
50.其中,上部行走机构201包括滚轴架203、滚轴204、第一伺服电机205、传动带206;滚轴架203采用双层挡板设置且挡板之间留有间隙,在该间隙中设置传动带206,将多个滚轴204采用环形阵列方式分布在滚轴架203一侧后,滚轴204的轴承贯穿滚轴架203时,传动带206同时套在多个轴承上,使多个滚轴204同步转动,在其中一个轴承端部连接上第一伺服电机205,此时的第一伺服电机205将区中多个滚轴204同步转动转动。
51.在具体实施中,其中一个滚轴204处于滚轴架203最低端的位置,并充当电缆的上夹持件,此时的滚轴204与第一弧形槽208对电缆进行夹持,滚轴204与电缆之间产生滑动摩擦力,滚轴204的移动方向则为本装置移动的反向。
52.本技术中,上部行走机构201与下部支撑杆机构202均包括有两个且在配电机箱100顶面呈中线对称设置,对电缆的两点进行夹持,来提高行走稳定及越障的方便。
53.另外,滚轴架203的中部连接固定上了转轴,在转轴的端部安装上第二伺服电机207,第二伺服电机207在转动时,滚轴架203与多个滚轴204将同步转动,由此形成翻越不可清扫障碍物的功能。在具体实施中,停止第一伺服电机205的工作,并将第一弧形槽208放下或使其倾斜,启动第二伺服电机207,多个滚轴504交替与电缆接触呈行走状,可用于翻越电缆上的不可清扫障碍物,其中,第二伺服电机207安装于支架400上,在滚轴架203与多个滚轴204转动圆心不便,在实际行走过程中,每一次滚轴204脱离电缆时,本装置均会有一个下降状,完整越过不可清扫障碍物时,本装置将会处于颠簸状,为此在配电机箱100顶部又设计了控线机构500提高本装置行走的稳定。
54.请参与图5,本技术的控线机构500包括固定座501、立柱502、滑杆503、弹簧504、第二弧形槽505;将两个立柱502对称固定于固定座501顶面后,再将固定座501安装于配电机箱100顶面中部,然后立柱502顶面向下开设限位孔506,将滑杆503安装于限位孔506内部并向上延伸出去,两个滑杆503顶部均固定于第二弧形槽505的底部,弹簧504安装于立柱502顶部并与第二弧形槽505连接固定,滑杆503设于弹簧504。
55.上述实施中,采用立柱502与滑杆503配合弹簧504形成对第二弧形槽505支撑的活动支撑件,其中,第二弧形槽505进行调大倾斜度以及加深槽深设置,第二弧形槽505顶端内部用于包裹电缆,其两端倾斜体,用于与不可清扫障碍物接触时,压缩过渡,避免卡死,加深的第二弧形槽505可是颠簸状态下的电缆能够充分被罩住,维持本装置的稳定。
56.需要注意的,第一弧形槽208与第二弧形槽505的内层均采用弹性的胶体,对电缆具有更好的包裹性。
57.请参阅图6-7,在本技术实施例中,清扫机构300包括切割部件301、u型架302;u型架302中部用于电缆穿过并与其间隙配合,切割部件301呈u型分布安装于u型架302的侧边,u型架302通过支杆与支架400连接。切割部件301包括第一刀片303和锯齿刀片304,两个锯齿刀片304对称固定在第一刀片303上并通过固定件安装于u型架302侧面,锯齿刀片304的齿牙部凸出到第一刀片303刀口前侧。
58.上述实施例中,采用锯齿刀片304与第一刀片303错位设置,提高剪切的撕裂强度,可以对电缆上可清扫障碍物进行快速清理。
59.在一些实施方式中,采用两个u型架302上下对称或错位设置,且敞口均朝向电缆,将两个u型架302分部连接在支架400上,对电缆障碍物清扫效果。
60.本技术在配电机箱100,两端倾斜向上安装了传感器及监控探头,可供用户远程操作识别障碍及系统自动感应提出警报,提醒用户或自动操作翻越障碍物。
61.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1