基于虚拟同步机的三电平并网逆变器的双环模型预测方法
1.本发明涉及电力电子变换控制技术领域,尤其涉及一种基于虚拟同步机的三电平并网逆变器的双环模型预测方法。
背景技术:
2.虚拟同步机(vsg)的一般控制方法采用pi电流内环、pq功率外环的控制方案或者简单地pr控制方法等,对于更优的控制方案没有更多的研究。近年来,由于数字信号处理器(digital signal processors,dsp)和现场可编程门阵列(field programmable gate array,fpga)的快速发展,一批新型的控制算法不断涌现,其中模型预测控制算法(model predictive control,mpc)拥有实现方便,稳态性能好,动态响应快,无超调的优点受到青睐。mpc包括有限控制集模型预测控制(finite control set model predictive control,fcs-mpc)和连续控制集模型预测控制(continuous control set model predictive control,ccs-mpc),其中fcs-mpc因为其动态快、无需调制环节,一直是国内外的热点。通过mpc控制和vsg的结合,可以进一步提升vsg提供电网支撑的能力。
3.为了进一步优化光伏并网的输出容量以及电流的谐波,逆变器拓扑方面可以选择使用中点箝位型(neutral point clamped,npc)三电平逆变器它的优点是功率管电压应力为直流母线电压的一半;相对于其他三电平逆变器拓扑,其等效电容少;理论分析统一性强,可直接扩展到更多电平逆变器拓扑等。它主要缺点是箝位二极管是快恢复二极管且需要承受全功率电流和反向恢复电压;存在直流母线电容电压不平衡问题,需要进行中点电压平衡控制。因此vsg下的mpc控制中点电压平衡将是研究的重点之一。
技术实现要素:
4.本发明的目的是为了提供一种响应较快且输出更稳定的虚拟同步机(vsg)的模型预测控制(mpc)的控制方法。
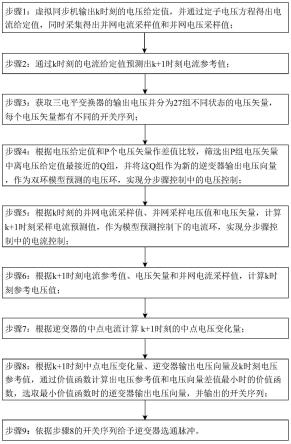
5.为解决以上技术问题,本发明的技术方案为:基于虚拟同步机的三电平并网逆变器的双环模型预测方法,包括:
6.步骤1:虚拟同步机根据下垂控制原理输出k时刻的电压给定值v(k),并通过定子电压方程得出电流给定值i
*
(k),同时采集得出并网电流采样值i(k)和并网电压采样值e(k);
7.步骤2:通过k时刻的电流给定值i
*
(k)预测出k+1时刻电流参考值i
*
(k+1);
8.步骤3:获取三电平变换器的输出电压并分为p组不同状态的电压矢量u(k),每个电压矢量都有不同的开关序列;
9.步骤4:根据电压给定值v(k)和p个电压矢量u(k)作差值比较,筛选出p组电压矢量u(k)中离电压给定值v(k)最接近的q组,并将这q组作为新的逆变器输出电压向量ui(k),作为双环模型预测的电压环,实现分步骤控制中的电压控制;
10.步骤5:根据k时刻的并网电流采样值i(k)、并网采样电压值e(k)和电压矢量u(k),
计算k+1时刻采样电流预测值i(k+1),作为模型预测控制下的电流环,实现分步骤控制中的电流控制;步骤6:根据k+1时刻电流参考值i
*
(k+1)、电压矢量u(k)和并网电流采样值i(k),计算k时刻参考电压值u
*
(k);
11.步骤7:根据逆变器的中点电流计算k+1时刻的中点电压变化量δv
np
(k+1);
12.步骤8:根据k+1时刻中点电压变化量δv
np
(k+1)、逆变器输出电压向量ui(k)及k时刻参考电压值u
*
(k),通过价值函数g
min
计算出参考电压值和电压向量差值最小时的价值函数,选取最小价值函数时的逆变器输出电压向量ui(k),并输出ui(k)的开关序列;
13.步骤9:依据步骤8的开关序列给予逆变器选通脉冲。
14.本发明具有如下有益效果:
15.与现有技术相比,本发明的显著优点在于:(1)采用mpc控制代替一般的pi控制,改进虚拟同步机并提高vsg的输出质量;(2)在保持原有mpc控制方法的基础上,不增加控制方法复杂度,通过电压电流分步控制的方法达到电压电流双环控制的效果;(3)能够减少输出电压、电流谐波,提高输出波形质量。
附图说明
16.图1为本发明流程示意图;
17.图2为本发明实施例中npc型三电平的拓扑结构图;
18.图3为本发明实施例中三电平空间矢量分布图;
19.图4为基于vsg的mpc控制框图;
20.图5为图4中vsg控制部分框图;
21.图6为图4中mpc部分框图;
22.图7为实施例1中采用电压筛选前后thd值对比图;其中,
23.图7(a)为采用一般的模型预测控制方法的thd值示意图;
24.图7(b)为采用改进的双环模型预测方法的thd值示意图。
具体实施方式
25.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本发明作进一步详细说明。
26.请参考图1至图7,本发明采用改进虚拟同步机的三电平并网逆变器的双环模型预测方法,通过模型预测控制代替pi控制改进了对vsg的控制策略,并实现了对电压电流两个变量的控制与调节。
27.结合图4,实现本发明目的的技术解决方案为:一种改进虚拟同步机的三电平并网逆变器的双环模型预测方法,通过模型预测控制代替传统pi控制改进了vsg的控制策略,体现了模型预测控制在vsg上的优越性。双环模型预测策略的具体实现是电压电流的分步骤控制;首先检测多电平逆变器直流母线的中点与正极之间的电容瞬时电压、并网采样电压值与并网采样电流值,并确定该两个电容瞬时电压的偏差。之后传感器采样的有关数据经过vsg生成当前时刻的参考电压及电流;通过电压给定值筛选电压向量作为双环模型预测的电压环,基于电压筛选后的电流模型预测控制作为电流环。以上的电压电流环可以认为是分别通过电压控制步骤和电流控制步骤实现。
28.本发明同时考虑了电压和电流对mpc的影响,提出的fsf-mpc方法通过分步骤控制电压电流的方法,达到了模型预测双环控制的功能,通过使用优化的电压向量筛选方法,从而获得了与传统vsg的pi电压电流双环控制相比更高的响应能力。同时,与经典的mpc方法相比,使用所提出的基于虚拟同步电机电压电流双闭环mpc(fsf-mpc)方法分步控制电压电流两个变量,首先对电压进行筛选,再以筛选过的电压向量作为电流模型预测控制的参考电压矢量,从而在输出电压电流中产生的更低的总谐波失真(thd)。
29.本发明基于的虚拟同步机的三电平并网逆变器的双环模型预测方法,步骤包括:
30.步骤1:设定合适的有功功率和无功功率的值输入虚拟同步机(virtual synchronous generator,vsg),虚拟同步机根据下垂控制原理输出k时刻的电压给定值v(k),并通过定子电压方程得出电流给定值i
*
(k),同时采集得出并网电流采样值i(k)和并网电压采样值e(k);
31.其中,步骤1中测出电流给定值i
*
(k),具体步骤如下:
32.步骤101,通过电压型虚拟同步机的有功功率控制部分计算出输出电压给定值v(k)的相角θ,通过电压型虚拟同步机的无功功率控制部分计算出输出电压给定值v(k)的电压幅值e,由此可得出v(k)在αβ坐标系下的数学表达式;
33.步骤102,分析虚拟同步机的电机特性,将输出的电压给定值v(k)通过定子电压方程转换为线电流即电流给定值i
*
(k)。
34.步骤2:通过步骤1中k时刻的电流给定值i
*
(k)预测出k+1时刻电流参考值i
*
(k+1);
35.其中,预测计算方法在于:假定电流给定值和电压给定值是恒定的正弦波,便可在k时刻的值预测出k+1时刻的值。
36.步骤3:获取中点钳位型三电平变换器的输出电压并分为27个不同状态的电压矢量u(k),27组电压矢量u(k)通过αβ轴坐标系表示;每个电压矢量都有不同的开关序列,27个输出的电压矢量u(k)总共有3种不同的值,分别为-0.5vdc、0、0.5vdc;
37.步骤4:在此步骤,主要目标是双环模型预测方法下达成对电压的控制,即分步骤控制中的电压控制步骤,作为双环模型预测的电压环。根据步骤1的电压给定值v(k)和步骤3的27个电压矢量u(k)作差值比较,筛选出27组电压矢量u(k)中离电压给定值v(k)最接近的12组,并根据分步控制电压电流的策略将这12组作为新的逆变器输出电压向量ui(k),输出电压向量ui(k)的步骤如下:
38.步骤401:计算27组电压矢量u(k)与电压给定值v(k)的27个不同的差值δui,其中i∈{1,2,3
…
27}:
39.δui=|v(k)-u(k)|
40.步骤402:取最小的12组δui,并将取得这12组差值δui的12个u(k)归为新的逆变器输出电压向量ui(k):
[0041][0042][0043][0044]
…
[0045][0046]
其中,为u1(k)与u(k)的补集,为u1(k)与u2(k)并集后与u(k)的补集,同理,为u1(k)与u2(k)
…u12
(k)并集后与u(k)的补集。
[0047]
双环模型预测方法下要求分步骤控制输出电压和输出电流,这组ui(k)便作为其中输出电压控制步骤的输出结果。
[0048]
步骤5:在此步骤,主要目标是双环模型预测方法下达成对电流的控制,可以看作是模型预测控制下的电流环。根据步骤1的k时刻的并网电流采样值i(k)、并网采样电压值e(k)和步骤3的电压矢量u(k),计算k+1时刻采样电流预测值i(k+1);
[0049]
计算电流预测值i(k+1)的方法如下:
[0050]
s501:根据基尔霍夫电压定律:
[0051][0052]
式中,l表示三电平逆变器交流侧滤波电感的感值;r表示滤波电感的等效电阻值;u表示三电平逆变器输出的电压矢量,i和e分别表示并网电流矢量和并网电压矢量;
[0053]
s502:将方程离散化:
[0054][0055]
整理得:
[0056][0057]
式中,i(k+1)为预测得到的k+1时刻的电流预测值,i(k)表示步骤1的并网采样电流值,u(k)表示步骤3中逆变器输出的27组电压矢量,e(k)表示步骤1的并网采样电压值,ts为离散周期,亦是采样周期。
[0058]
步骤6:在此步骤,根据步骤2的k+1时刻电流参考值i
*
(k+1)、步骤3的电压矢量u(k)和步骤1的并网电流采样值i(k),计算k时刻参考电压值u
*
(k),即参考电压矢量;参考电压值u
*
(k(计算方法具体如下:
[0059]
参考公式:
[0060][0061]
已知k+1时刻电流参考值为i
*
(k+1),用i
*
(k+1)替换上式中的i(k+1),则k时刻参考电压值u
*
(k)为:
[0062][0063]
步骤7:根据逆变器的中点电流计算k+1时刻的中点电压变化量δv
np
(k+1);
[0064]
根据本发明使用的npc三电平逆变器,需要考虑逆变器得中点电压,如图1中o点的电压;具体步骤为:
[0065]
步骤701,根据图1,假设直流母线c1、c2的容值相等,即c1=c2=c;
[0066][0067]
由上式可得中点电压变化量δv
np
的表达式为
[0068][0069]
式中v
c1
、v
c2
满足v
c1
+v
c2
=v
dc
,可得中点电压变化量δv
np
与中点电流直接相关;
[0070]
步骤702,令每相电压的输出电平状态由表示,1代表p状态,0代表o状态,-1代表n状态;中点电流的表达式为:
[0071]io
=(1-|sa|)
·
ia+(1-|sb|)
·
ib+(1-|sc|)
·
ic[0072]
=ia+ib+i
c-(|sa|
·
ia+|sb|
·
ib+|sc|
·
ic)
[0073]
步骤703,对于三相三线制逆变器系统,三相输出电流满足表达式:ia+ib+ic=0。所以io=-(|sa|
·
ia+|sb|
·
ib+|sc|
·
ic),代入上一步可得中点电压变化量δv
np
的表达式为:
[0074][0075]
步骤704,假设各相电流在采样周期中保持不变,从而可以将步骤703的公式离散化为:
[0076][0077]
其中,sa(k)表示k时刻a相电压的输出电平状态,sb(k)表示k时刻b相电压的输出电平状态,c(k)表示k时刻c相电压的输出电平状态;ia(k)表示k时刻a相输出电流,ib(k)表示k时刻b相输出电流,ic(k)表示k时刻c相输出电流;c为直流母线电容容值,ts表示采样周期。
[0078]
步骤8:在此步骤,根据步骤7计算出的k+1时刻中点电压变化量δv
np
)k+1)和步骤4计算出的逆变器输出电压向量ui(k)及步骤6计算出的k时刻参考电压值u
*
(k),通过价值函数g
min
算出最合适的开关序列,即选取价值函数g
min
最小时的逆变器输出电压向量ui(k),ui(k)的开关序列便为此时所采用的开关序列,参考电压值和电压向量差值最小时获得的价值函数g
min
最小;具体步骤如下;
[0079]
步骤801,根据步骤7的中点电压变化量δv
np
(k+1)、步骤2中的k+1时刻电流参考值i
*
(k+1)、步骤5中的k+1时刻电流预测值i(k+1),计算价值函数为:
[0080]gmin
=min(i(k+1)-i
*
(k+1))+λ|δv
np
(k+1)|
[0081]
其中,λ为δv
np
(k+1)权重系数;
[0082]
步骤802,根据步骤7,i(k+1)-i
*
(k+1)简化为u(k)-u
*
(k),则价值函数为:
[0083]gmin
=min(u(k)-u
*
(k))+λ|δv
np
(k+1)|
[0084]
步骤803,根据步骤4,用ui(k)代替u(k),根据k时刻参考电压值u
*
(k),计算价值函数为:
[0085]gmin
=min(ui(k)-u
*
(k))+λ|δv
np
(k+1)|
[0086]
步骤804,选取g
min
最小时的逆变器输出电压向量ui(k),其开关序列便为此时所采用的开关序列。
[0087]
步骤9:依据上一步骤给予逆变器选通脉冲。
[0088]
下面以三电平逆变器为例,结合附图说明本发明的具体实施方式过程。
[0089]
1、虚拟同步机实施过程
[0090]
虚拟同步机vsg控制策略可以让并网逆变器模拟同步发电机组的特性,参与电网的一次调频与一次调压,并且提供虚拟的旋转惯量以帮助电网维持频率稳定。
[0091]
图5显示,电压型vsg分为有功功率控制部分和无功功率控制部分。其中有功功率部分依据下垂控制的原则对输出电压的频率进行调节,又称为有功-频率控制器;其中无功功率部分对输出电压的幅值进行调节,又称无功-电压控制器。
[0092]
vsg的有功-频率控制器主要模拟同步发电机的旋转惯量和频率调节。因此首先考虑模拟同步发电机的转子方程,即:
[0093][0094]
式中,pe为输出有功功率,pm为虚拟机械有功功率,ωn为并网逆变器额定角频率,j为vsg的虚拟转动惯量。另外,考虑对同步发电机有功-频率调节的模拟,通常采用p-ω下垂方程,如下式所示:
[0095]
pm=p
set
+k
p
(ω
n-ω)
ꢀꢀ
(2)
[0096]
式中,pm为虚拟机械有功功率,p
set
为有功环输出有功功率设定值,k
p
为p-ω下垂系数,ω为vsg的角速度。综上所述,考虑式(1)、(2),虚拟同步发电机有功-频率环可以表示为:
[0097][0098]
式中,将上式与同步发电机的转子机械运动方程对比可知,下垂系数在d
p
微分方程的作用与阻尼系数相同,因此此处的下垂系数能够提供一定虚拟阻尼作用。另外t
set
与te还可以表示为:
[0099][0100][0101]
在电力系统中,电压的变化通常由系统无功变化引起,因此通常通过对同步发电机励磁的调节,从而实现对电压的调整:—方面,无功负荷的变化会影响线路压降,从而改变系统各个节点处电压。另一方面,电压调节一般采用就近调节,同步机通过检测电压幅值的偏移量,从而对其励磁电压进行调节,最终调整同步发电机的无功输出值,起到对系统电压变化的抑制作用。
[0102]
模拟上述同步发电机通过调节励磁从而实现调压的过程,vsg的无功-电压控制器可通过检测电压偏移量,从而取改变逆变器无功输出值,通常可通过q-u下垂方程来实现,如式下:
[0103][0104]
由上式,q
set
为无功设定值,qm为vsg无功输出值,dq为q-u下垂系数。un为额定输出电压的有效值,u0为输出电压的有效值。同样,为了抑制电压的突变,仿照同步发电机转子方程,引入一个类似结构的微分方程来模拟同步发电机励磁调节系统的电气惯性,如下式所示:
[0105][0106]
式中,qm为虚拟无功功率输入量,qe为输出无功功率。em为逆变器输出内电势有效值,k为电压方程式的电气惯性参数。综上所述,考虑式(5)、(6),虚拟同步发电机无功-电压环可以表示为:
[0107][0108]
经过电压型vsg有功功率控制部分和无功功率控制部分计算后得出双环模型预测控制的电压控制步骤所需的电压给定值v(k)。
[0109]
根据图4,依据图4的定子电压方程计算出电流给定值i
*
(k)。因为电流给定值可看作正弦波,则预测k+1时刻的电流参考值i
*
(k+1)。
[0110]
2、模型预测控制实施过程
[0111]
表1详细表述了三电平逆变器开关状态与输出三相电压电平的关系,其拓扑结构如图2所示,p表示正母线电压电平,n表示负母线电压电平,直流母线中点0表示参考零电位。共有12个开关,每个桥臂有4个,分为三组,分别为s
x1
、s
x2
、s
x3
和s
x4
,代表每个桥臂的4个开关,下标x为a、b和c,代表被三个桥臂分为的3组。
[0112]
表1三电平逆变器开关状态与输出三相电压电平的关系参考表
[0113][0114][0115]
在理想条件下,当中点电压平衡(即相对于零电位中点电压变化量δv
np
=0)时,直流母线电容c1、c2的电压当中点电压不平衡时即偏离零电位,直流母线电容c1、c2的电压不相等时,中点电压变化量δv
np
的表达式为
[0116]
如图2所示,中点电流io与流经上下直流母线电容c1、c2的电流i1、i2的关系如下:令直流母线c1、c2的容值相等,即c1=c2=c。
[0117][0118]
由上式可得中点电压变化量δv
np
的表达式为
[0119][0120]
式中v
c1
、v
c2
满足v
c1
+v
c2
=v
dc
,可得中点电压变化量δv
np
与中点电流直接相关。
[0121]
令每相电压的输出电平状态由表示,1代表p状态,0代表o状态,-1代表n状态。中点电流的表达式为:
[0122]ip
=(1-|sa|)
·
ia+(1|sb|)
·
ib+(1-|sc|)
·
ic[0123]
=ia+ib+i
c-(|sa|
·
ia+|sb|
·
ib+|sc|
·
ic)
ꢀꢀ
(10)
[0124]
对于三相三线制逆变器系统,三相输出电流满足表达式:ia+ib+ic=0
[0125]
所以io=-(|sa|
·
ia+|sb|
·
ib+|sc|
·
ic),代入式(9)可得中点电压变化量δv
np
的表达式为:
[0126][0127]
相比于电网电压周期(毫秒级),系统采样周期(微秒级)十分微小,因此可以合理假设各相电流在采样周期中保持不变,从而可以将式(11)离散化为:
[0128][0129]
由于每相桥臂有3种不同的相开关状态,所以总共有33=27种不同的相开关状态组合。为了对应表示三电平逆变器的27个不同的相开关状态组合,定义基本开关状态sn:
[0130]
sn=[s
an s
bn s
cn
]
ꢀꢀ
(13)
[0131]
其中n=1,2
…
27;s
in
(i=a,b,c)为相开关状态。
[0132]
以逆变器直流侧中点(o)作为参考零点,对应于相开关状态s
in
的三电平逆变器输出相电压u
in
可以表示为:
[0133][0134]
其中,v
dc
为直流母线总电压值。
[0135]
因此,在αβ坐标系下可以得到对应于基本开关状态sn的基本电压矢量un:
[0136][0137]
图3给出αβ坐标系下的基本电压矢量un的空间分布,un的位置如图中的高亮红点所示,图中的u1,u2,
…
,u27(依次对应于s1,s2,
…
,s27)构成fcs-mpc入网电流预测计算所需的基本输入控制集合。根据vsg的电压给定值v(k)和图中的27个电压矢量作差值比较,筛选出27组电压矢量中离电压给定值v(k)最接近的12组向量,并将它们作为新的逆变器输出电压向量ui(k)。由此可见对基本开关状态sn的评估实质上是对基本电压矢量un的评估。
[0138]
根据基尔霍夫电压定律,可得:
[0139][0140]
其中,l(la=lb=lc=l)表示三电平逆变器交流侧滤波电感的感值;r(ra=rb=rc=r)表示滤波电感的等效电阻值;u表示三电平逆变器输出的电压矢量,且u∈{u1,u2,
…
,u27},i和e分别表示入网电流矢量和电网电压矢量。
[0141]
因为fcs-mpc需要利用被控变量的离散数学模型进行预测计算,所以本发明采用一阶前向差分方程对式(16)进行离散化后可得:
[0142][0143]
其中,ts为离散周期,亦是采样周期。
[0144]
由式(17)可知,根据k时刻的并网电流采样值i(k)、并网采样电压值e(k)和当前采样周期三电平逆变器所输出的电压矢量u(k),可以预测计算出k+1时刻的电流预测值i(k+1)。
[0145]
对于三电平并网逆变器而言,一般的控制目标有:入网功率跟踪控制、入网电流跟踪控制、直流母线电容电压平衡控制、共模电压抑制等。本发明设计价值函数为:
[0146]gmin
=min(ui(k)-u
*
(k))+λ|δv
np
(k+1)|
[0147]
ui(k)∈(1,2,3
…
12);λ为中点电压的权重系数。
[0148]
其中u
*
(k)为参考电压矢量,其计算方式为:
[0149][0150]
其中i
*
(k+1)为参考电流矢量,即电流参考值,由vsg电压给定值v(k)经过定子方程后获得。
[0151]
实施例1
[0152]
本实施例利用matlab中的simulink工具搭建了三电平逆变电路,直流电经直流母线电容后由三电平电路逆变输出三相电压,经基于三电平变换器的虚拟同步机的双环模型预测控制方法输出光滑的三相正弦电压。仿真过程中的电气参数设置如下表:
[0153][0154]
具体程序流程如图6所示,通过流程输出合适的12个参考电压。第一步采样k时刻
的电压值;第二步,27组向量数组逆变器输出电压us(k)(s∈{1,2,
…
27})与电压给定值v(k)的27个不同的差值δui,循环27次;第三步将27次中每次循环中最小的δui所对应的27组之一的元素us(k)作为新数组ui(k)的元素,同时将最小的δui赋值为max(δui);第四步,跳回第三步,将会得出新的最小的δui,如此循环13次,将得出的新数组ui(k)(i∈{1,2,3,4
…
13})作为新的参考电压。
[0155]
图7(a)为在上述电气参数设置下的输出电流的谐波失真(thd),图7(b)为在上述电气参数设置下但没有进行电压筛选方法的输出电流的谐波失真(thd)。在未使用双环模型预测方法时,thd为0.83%,有较大的谐波,而加入双环模型预测方法时,thd为0.39%,说明本发明所用的方法可以有效的改善输出谐波分量,能够有效的稳定输出,可见本发明的控制方法控制效果显著。
[0156]
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1