信号收发方法与流程
1.本发明涉及一种例如用于在发送部和接收部之间对多种频率的信号进行收发的信号收发方法。
背景技术:
2.为了在信号的发送部和接收部之间实现高精度的同步运行,使接收频带比现有的接收频带更窄。例如,当用于同步运行的基准脉冲频率为60hz时,设置将接收频带缩小到60
±
1%的限制。在这种情况下,进行如下运用:通过将基准脉冲频率固定为60hz,1hz的频带就足够了。
3.另一方面,还提出了一种能够检测宽频带的频率的频率检测器。例如,日本公开公报特开2015
‑
31680号公报公开了一种频率检测器,该频率检测器通过使用从触发信号生成电路输出start信号的时刻t1起到触发信号生成电路3在频率测量期间内最后输出stop信号的时刻t2为止的时间t、以及从触发信号生成电路输出stop信号的次数的计数值,来运算频率测定对象信号的频率,从而抑制频率分辨率的劣化,并进行宽频带的频率的检测。现有技术文献专利文献
4.专利文献1:日本公开公报:日本专利特开2015
‑
31680号公报
技术实现要素:
发明所要解决的技术问题
5.在上述现有的同步运行以60hz以外的频率进行驱动的情况下,由于接收频带的限制为60
±
1%,因此存在如下问题:若将该接收带宽设为比
±
1%要宽,则由接收部接收的频率的分辨率降低。在这种情况下,接收部中的频率的用途越来越多,还存在当需要一个更快频率的信号的情况下无法进行应对的问题。此外,获取高精度的同步导致收发机变得昂贵。
6.对此,日本公开公报特开2015
‑
31680号公报的频率检测器存在以下问题:即使能够检测宽频带的频率,也需要对频率测量对象信号的上升沿或下降沿进行检测,并且还需要根据strat信号和stop信号之间的时间t以及stop信号的输出次数的计数值来运算频率测量对象信号的频率,因此,频率检测处理变得复杂,装置结构也变得复杂。
7.本发明是鉴于上述问题而完成的,其目的在于提供一种信号收发方法,能够以简单的结构在信号的发送部和接收部之间实现高精度的同步运行。用于解决技术问题的技术手段
8.作为实现上述目的并解决上述问题的一种手段,本发明具备以下结构。即,本申请的第一个示例性发明是一种信号收发方法,用于在发送部和接收部之间对多种频率的基准信号进行收发,其特征在于,在所述发送部中包括:发送对所述基准信号的切换频率进行通知的通知信号的工序;以及与所述通知信号连续地发送通知得到的所述频率的基准信号的
工序,在所述接收部中包括:检测所述通知信号的工序;基于所述检测结果来判断所述基准信号的切换频率的判断工序;以及切换为判断出的所述频率的基准信号的工序。
9.本申请的第二个示例性发明是一种跟踪系统,在设置有激光发生装置的规定空间内进行安装有激光接收部的对象物的位置跟踪,其特征在于,包括:根据上述的第一示例性发明所涉及的信号收发方法来收发基准信号和通知信号的单元;基于所述基准信号将闪烁光照射到所述对象物的单元;与所述基准信号同步地使电动机旋转的单元;利用所述电动机的旋转通过所照射的所述激光来扫描所述规定空间的单元;以及基于所述闪烁光的照射定时与进行扫描的所述激光到达所述对象物的定时之间的时间差来检测所述对象物在所述规定空间中的位置的检测单元。发明效果
10.根据本发明,能提供一种信号收发方法,在不降低由接收部接收的频率的分辨率的情况下能对多个频率的信号进行收发。
附图说明
11.图1是本发明的一个实施方式所涉及的信号收发系统的简要结构图。图2是按照时间序列示出实施方式所涉及的信号收发系统中的信号发送处理步骤的流程图。图3是按照时间序列示出实施方式所涉及的信号收发系统中的信号接收处理步骤的流程图。图4是信号收发系统中的通知信号和基准信号的第一收发方法所涉及的信号时序图。图5是信号收发系统中的通知信号和基准信号的第二收发方法所涉及的信号时序图。图6是信号收发系统中的通知信号和基准信号的第三收发方法所涉及的信号时序图。图7是信号收发系统中的通知信号和基准信号的第四收发方法所涉及的信号时序图。图8是示出对设置有激光产生装置的规定空间内的对象物的位置等进行跟踪的位置跟踪系统的一个示例的框图。
具体实施方式
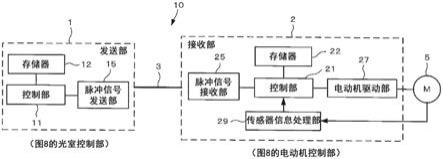
12.以下,参照附图对本发明所涉及的实施方式进行说明。图1是本发明的一个实施方式所涉及的信号收发系统的简要结构图。图1的信号收发系统10包括发送部1、接收部2、以及连接在发送部1和接收部2之间的信号线3。发送部1是用于对接收部2指令发送后述的基准3脉冲等的上位系统。此外,接收部2是根据接收到的基准信号等来驱动电动机5的电动机控制器。
13.发送部1包括:控制部11,该控制部11例如由微处理器构成,对发送部整体进行控制;存储器12,该存储器12存储有发送处理程序等;以及脉冲信号发送部15,该脉冲信号发送部15接收来自控制部11的指令并输出规定的脉冲信号等。
14.接收部2包括:控制部21,该控制部21例如由微处理器构成并对接收部整体进行控制;存储器22,该存储器22存储有接收处理程序、电动机控制程序等;以及脉冲信号接收部25,该脉冲信号接收部25接收从发送部1发送来的脉冲信号等。此外,还包括:电动机驱动部27,该电动机驱动部27向电动机15提供规定的驱动电流;以及传感器信息处理部29,该传感器信息处理部29将来自与电动机5的各相相对应地设置的电流传感器(未示出)的信号作为电动机的旋转控制等所涉及的传感器信息来处理。
15.接下来,对本实施方式所涉及的信号收发系统的信号发送处理进行说明。图2是按照时间序列示出实施方式所涉及的信号收发系统10中的信号发送处理步骤的流程图。此外,图3是按照时间序列示出信号收发系统10中的信号接收处理步骤的流程图。
16.作为信号收发系统10中的信号发送处理,发送部1的控制部11在图2的步骤s11中切换到多个预先设定的频率模式。在步骤s13中,控制部11向脉冲信号发送部15发送用于发送通知信号的指令(控制信号),该通知信号通知发送和接收之间预先达成协议的频率。其结果是,从脉冲信号发送部15发送用于通知基准信号的切换频率的通知信号。
17.在接下来的步骤s15中,控制部11对脉冲信号发送部15发出指示,以使得与上述步骤s11中发送出的通知信号连续地向接收部2侧发送由该通知信号所通知的频率的基准信号。
18.另一方面,在信号收发系统10中的信号接收处理中,首先,在图3的步骤s21中,接收部2的脉冲信号接收部25接收从发送部1发送来的通知信号。在接下来的步骤s23中,控制部21判定是否能根据接收到的通知信号来判断切换频率,即、判定通知信号是否是用于通知在发送和接收之间预先达成协议的频率的信号。
19.在步骤s23中能够判断切换频率的情况下,在步骤s25中开始接收从发送部1发送来的基准信号。在接下来的步骤s27中,为了使电动机5与接收到的基准信号同步地旋转,控制部21生成与基准信号相同的高精度的电动机驱动用信号。然后,在步骤s29中,利用该电动机驱动用信号来驱动电动机5。
20.由此,在信号收发系统10中,发送部1和接收部2之间的信号的收发被分成对通知信号进行收发的第一步骤、以及对基准信号进行收发的第二步骤这两个阶段。也就是说,发送部1在第一步骤中利用通知信号向接收部2传输近似频率,并在第二步骤中传输基准信号这一高精度的频率。
21.此外,为了通过作为发送部1和接收部2之间的单个信号路径的信号线3收发通知信号和基准信号,信号收发系统10对通知信号和基准信号进行多路复用。也就是说,通过利用单个信号线按时间序列连续地发送基准信号和通知信号这两个不同的信号,从而能使信号线的结构简化,并能高效地使用信号线。
22.接下来,对本实施方式所涉及的信号收发系统中的通知信号和基准信号的收发方法(实施例)进行具体说明。
23.<第一收发方法>图4是信号收发系统中的通知信号和基准信号的第一收发方法所涉及的信号时序图。在图4所示的示例中,通知信号由单触发脉冲构成,接收部基于单触发脉冲的脉冲数来判断基准信号的切换频率。
24.也就是说,预先在发送部和接收部之间使脉冲数和与其对应的频率模式的切换达
成协议,在图4(a)的示例中,单触发脉冲的脉冲数为1(在图中,用
×
1表示),因此,在发送部和接收部之间切换到对40hz的基准信号进行收发的频率模式,40hz的基准信号从发送部被发送到接收部。
25.同样地,在图4(b)的示例中,单触发脉冲的脉冲数为2(在图中用
×
2表示),因此,在发送部和接收部之间切换到对50hz的基准信号进行收发的频率模式。此外,在图4(c)中,由于单触发脉冲的脉冲数为3(在图中,用
×
3表示),因此在发送部和接收部之间切换到对60hz的基准信号进行收发的频率模式。
26.由此,接收部基于单触发脉冲的数量来判断近似频率,单触发脉冲的第1个脉冲中切换到40hz、单触发脉冲的第2个脉冲中切换到50hz、单触发脉冲的第3个脉冲中切换到60hz,将频率模式从低频依次切换到高频。
27.因此,在第一收发方法中,通过对单触发脉冲的脉冲数进行计数,从而能容易地判断紧接着通知信号发送的基准信号的切换频率。此外,由于接收部能在接收到通知信号之后,逐渐向通知得到的频率的基准信号进行切换,因此,例如能在电动机驱动控制中逐渐加速电动机。
28.<第二收发方法>图5是信号收发系统中的通知信号和基准信号的第二收发方法所涉及的信号时序图。在图5所示的示例中,接收部基于单触发脉冲的脉冲宽度来判断基准信号的切换频率。
29.在第二收发方法中,在发送部和接收部之间预先使脉冲宽度和与其对应的频率模式的切换达成协议。因此,在图5(a)的示例中,单触发脉冲的脉冲宽度t1例如为5ms,因而在发送部和接收部之间切换到对40hz的基准信号进行收发的频率模式。
30.同样地,在图5(b)的示例中,由于单触发脉冲的脉冲宽度t2为10ms,因此在发送部和接收部之间切换到对50hz的基准信号进行收发的频率模式。此外,在图5(c)中,由于单触发脉冲的脉冲宽度t3为15ms,因此在发送部和接收部之间切换到对60hz的基准信号进行收发的频率模式。
31.如上所述,接收部根据单触发脉冲的脉冲宽度来判断近似频率,当单触发脉冲的脉冲宽度为5ms时切换到40hz,当脉冲宽度为10ms时切换到50hz,当脉冲宽度为15ms时切换到60hz,将频率模式从低频依次切换到高频。
32.由此,在第二收发方法中,通过对单触发脉冲的脉冲宽度进行检测,从而能容易地判断紧接着通知信号的基准信号的切换频率。此外,由于能在接收到通知信号之后逐渐向通知得到的频率的基准信号进行切换,因此,例如能在电动机驱动控制中逐渐加速电动机。
33.<第三收发方法>图6是信号收发系统中的通知信号和基准信号的第三收发方法所涉及的信号时序图。在图6所示的示例中,接收部基于从发送部发送来的脉冲序列信号的脉冲宽度或占空比来判断基准信号的切换频率。
34.在第三收发方法中,也在发送部和接收部之间预先使脉冲宽度或占空比和与其对应的频率模式的切换达成协议。在图6(a)所示的示例中,在接收部中为10%的情况下,在发送部和接收部之间切换到对40hz的基准信号进行收发的频率模式。
35.同样地,在图6(b)的示例中,当脉冲序列的脉冲宽度w2为5ms或占空比(d2/(d2+d2’))为20%时,在发送部和接收部之间切换到对50hz的基准信号进行收发的频率模式。此
外,在图6(c)中,当脉冲序列的脉冲宽度为6ms或占空比(d3/(d3+d3’))为30%时,在发送部和接收部之间切换到对60hz的基准信号进行收发的频率模式。
36.如上所述,接收部基于脉冲序列的脉冲宽度或占空比来判断近似频率,当占空比为10%时切换到40hz,当占空比为20%时切换到50hz,当占空比为30%时切换到60hz,或者,当脉冲宽度为4ms时切换到40hz,当脉冲宽度为5ms时切换到50hz,当脉冲宽度为6ms时切换到60hz,将频率模式从低频依次切换到高频。
37.由此,在第三收发方法中,通知信号和基准信号具有相同的脉冲宽度和相同的占空比。换句话说,根据各频率模式的频率,使各脉冲信号的脉冲间隔(接通时间和断开时间之和)与脉冲宽度(占空比)不同,由此,单个脉冲序列包含2个信息,并且可以基于它们来判断频率。
38.由此,第三收发方法中,发送部不需要像上述第一收发方法和第二收发方法那样根据通知信号和基准信号来切换发送信号,因此简化了发送部的结构,能减少处理负担。
39.此外,通过观察脉冲的上升和下降,接收部可以根据首先到达的信号的脉冲宽度或占空比来容易地确定并判断切换频率。此外,在电动机控制中,即使当电动机处于驱动过程中,也能简单地切换基准信号(频率模式)。
40.<第四收发方法>图7是信号收发系统中的通知信号和基准信号的第四收发方法所涉及的信号时序图。在图7所示的示例中,根据基本信号直接判断近似频率。即,这是将通知信号和基准信号设为相同频率的信号的示例。
41.具体而言,在图7(a)所示的示例中,接收部从脉冲序列的脉冲波长λ1求出其倒数来判断为近似频率为40hz,在发送部和接收部之间切换到对40hz的基准信号进行收发的频率模式。
42.同样地,在图7(b)所示的示例中,从脉冲序列的脉冲波长λ2求出其倒数来判断为近似频率为50hz,在发送部和接收部之间切换到对50hz的基准信号进行收发的频率模式。此外,在图7(c)所示的示例中,从脉冲序列的脉冲波长λ3求出其倒数来判断为近似频率为60hz,在发送部和接收部之间切换到对60hz的基准信号进行收发的频率模式。
43.由此,第四收发方法采用基准信号直接包含通知信号的结构,即、不单独设置通知信号的结构,能根据基准信号直接判断其频率。因此,不需要在发送部中发送通知信号的处理,由此也不需要切换发送信号,因而简化了用于发送部的信号发送的结构。
44.接下来,对应用了本实施方式所涉及的信号收发方法的位置跟踪系统进行说明。图8是示出在设置有激光产生装置的规定空间内对安装有激光传感器的对象物的位置等进行跟踪的位置跟踪系统的一个示例的框图。
45.为了测量对象物(玩家)62在真实世界中的位置(玩家头部的位置、动作等),图8的位置跟踪系统30使用戴在对象物62上的光电传感器61来使对象物62的位置、动作等在真实世界和虚拟空间双方中一致。
46.因此,设置在基站(光室)40内的光室控制部31将例如60hz的基准信号发送到发光部(led闪烁器)33,并使发光部33内的发光二极管(led)闪烁。其结果是,闪烁光53被照射到空间。
47.此外,光室控制部31将60hz的基准信号输出到电动机控制部39。电动机控制部39
根据该基准信号使电动机41旋转。电动机41构成为能根据电动机的旋转来反射从激光光源45发出的激光。基站40通过根据电动机41的旋转而反射的激光,以横穿位置跟踪系统30的空间的方式进行扫描。
48.在此,虽然省略图示,但为了确定对象物62的准确的坐标,位置跟踪系统30构成为通过两个电动机和激光分别扫描空间的x轴和y轴。
49.当光电传感器61检测到来自发光部33的光时,跟踪处理部50将位置跟踪的时间重置为0。然后,测定光传感器61被初始的闪烁光照到的时间与光传感器61被激光照到的时间之间的时间差,并将该时间差校正为角度,以检测对象物62的位置等。
50.在位置跟踪系统30中,如果存在激光的检测误差,则难以准确地检测对象物62的位置(坐标确定),因此需要恒定且高精度地进行激光的扫描、即激光的旋转。因此,需要如下结构:准确地读取发光部33的发光二极管(led)的闪烁间隔,即、准确地读取60hz的基准信号,并维持该间隔来使电动机持续旋转。
51.此外,为了检测激光的旋转角度,激光的旋转必须是恒定的,因此需要高精度的电动机控制。
52.因此,在位置跟踪系统30中,通过使光室控制部31对应于图1等中的发送部1,并使电动机控制部39对应于图1等中的接收部2,来应用本实施方式所涉及的信号收发系统中的信号收发方法,从而能实现如下结构:准确地检测60hz的基准信号,并与该基准信号同步地使电动机高精度地旋转。由此,通过将电动机的旋转精度设为高精度,从而激光的旋转精度也提高,能可靠地确定规定空间中的对象物的位置坐标。
53.此外,能高精度地检测游戏玩家在虚拟现实(vr)中的动作,能在接近真实空间的环境中开展游戏。此外,由于位置传感器的更新周期取决于电动机的转速,因此还能对应于与游戏等的规格变更、用途相对应的转速的切换。
54.如以上所说明的那样,本实施方式所涉及的信号收发方法通过在发送部和接收部之间分成2个阶段来进行信号的收发,从而顺畅地向预先在收发间设定的多个频率模式进行切换,并能利用切换后的频率来进行同步运行,上述成2个阶段为:对通知信号进行收发来传输近似频率的第一步骤;以及接着该第一步骤,对基准信号这一高精度的频率的信号进行收发的第二步骤。
55.特别地,通过设为使通知信号和基准信号具有相同的脉冲宽度和相同的占空比的结构,从而能将2个信息包含在单个脉冲序列中,由于无需在发送部中与通知信号和基准信号相对应地对发送信号切换信号形式,因此能简化发送部的结构,随之相伴的处理负担也得到减轻。
56.此外,接收部中,通过观察到来的脉冲信号的上升和下降,并根据该脉冲信号的脉冲宽度或占空比,从而能容易且迅速地判断切换频率。
57.此外,在采用上述信号收发方法的信号收发系统中,通过在发送部和接收部之间设置单个信号路径(信号线),从而能按时间序列连续地发送通知信号和基准信号这两个不同的信号,不仅能有效地使用信号线,而且能通过简化信号线的结构来降低系统的成本。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1