一种安防巡逻机器人的制作方法
1.本实用新型涉及巡逻设备的技术领域,特别是涉及一种安防巡逻机器人。
背景技术:
2.摄像头又称为电脑相机、电脑眼、电子眼等,是一种视频输入设备,被广泛的运用于视频会议,远程医疗及实时监控等方面,摄像头将监控的画面通过网络信号反馈到控制室的电脑上,监控人员通过电脑画面即可了解情况,在现有的一些小区巡逻装置上的摄像头,在进行摄像时不便于进行三百六十度旋转和角度的调整,从而导致摄像范围受限,不能满足用户的使用需求。
技术实现要素:
3.为解决上述技术问题,本实用新型提供提高了灵活性,提高了便捷性的一种安防巡逻机器人。
4.本实用新型的一种安防巡逻机器人,包括遥控车、支架、工作台和底座,遥控车的顶端连接支架的底端,支架的顶端连接工作台的顶端,底座的底端连接工作台的顶端,工作台的内部有腔室,工作台的顶端有圆形凹槽,圆形凹槽的内壁设置有环形滑槽;还包括伺服电机、转轴、轴承、一号锥形齿轮、二号锥形齿轮、转盘、环形滑块、支杆、调节板、摄像头、连接轴和角度调整装置,伺服电机的底端连接工作台的顶端,轴承的右端连接腔室的右端,伺服电机的输出端连接转轴的左端,转轴的右端从底座的左端延伸至腔室中并且转动连接轴承,转轴在腔室中连接一号锥形齿轮,转盘的外壁设置有环形滑块,环形滑块在环形滑槽中滑动安装,转盘的底端中心连接连接轴的顶端,连接轴的底端从圆形凹槽中延伸至腔室中并且连接二号锥形齿轮的顶端,一号锥形齿轮与二号锥形齿轮啮合,转盘的顶端连接支杆的底端,支杆的顶端铰接调节板底端左部,调节板的顶端连接摄像头的底端,支杆和调节板之间安装有角度调整装置,用来调整摄像头的角度。
5.本实用新型的一种安防巡逻机器人,角度调整装置包括一号连接座、二号连接座、一号螺纹杆、二号螺纹杆、螺纹套筒和蝶型把手,一号连接座的左端连接支杆的右端,二号连接座的顶端连接调节板的底端,一号螺纹杆的左端铰接一号连接座的右端,二号螺纹杆的右端铰接二号连接座的底端,一号螺纹杆和二号螺纹杆分别与螺纹套筒螺纹连接,螺纹套筒上安装有蝶型把手。
6.本实用新型的一种安防巡逻机器人,还包括钢化玻璃防护罩、把手和密封条,工作台的顶端设置有环形凹槽,密封条的底端连接环形凹槽的底端,钢化玻璃防护罩通过环形凹槽卡紧,钢化玻璃防护罩的左右两端均设置有把手。
7.本实用新型的一种安防巡逻机器人,还包括环形轨道和多个滑轮,环形轨道安装在圆形凹槽的底端,多个滑轮的顶端均连接转盘的底端,多个滑轮均在环形轨道上滑动安装。
8.本实用新型的一种安防巡逻机器人,还包括主把手,主把手的右端连接滑轮的左
端。
9.本实用新型的一种安防巡逻机器人,还包括把套,把套套装在主把手上。
10.本实用新型的一种安防巡逻机器人,还包括灯泡,灯泡安装在工作台的右端。
11.与现有技术相比本实用新型的有益效果为:打开伺服电机,使转轴在轴承的配合下使一号锥形齿轮转动,从而使一号锥形齿轮带动二号锥形齿轮和连接轴转动,然后使转盘在环形滑块的配合下在圆形凹槽中转动,然后在支杆和调节板的配合下对摄像头进行三百六十度的转动调整,然后通过角度调整装置对摄像头的角度进行再次调整,符合要求后,通过遥控控制遥控车进行巡逻,摄像头将监控的画面通过网络信号反馈到监控室的电脑上,提高了灵活性,提高了便捷性。
附图说明
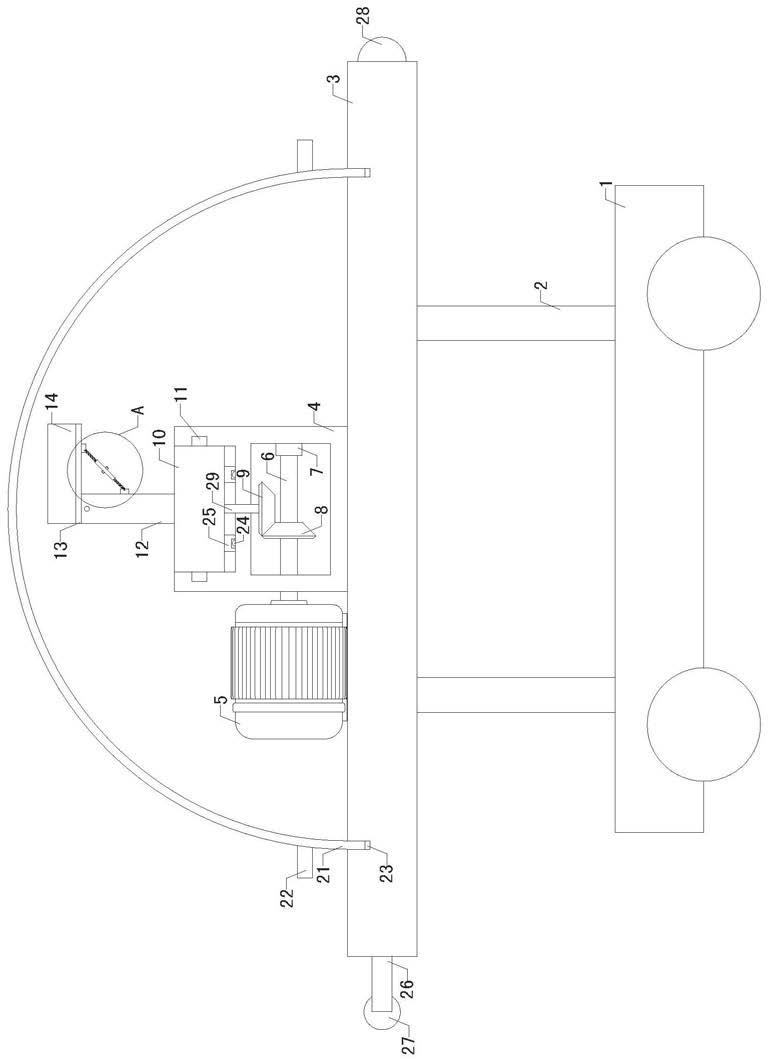
12.图1是本实用新型的剖视结构示意图;
13.图2是本实用新型的结构示意图;
14.图3是图1中a部局部放大结构示意图;
15.附图中标记:1、遥控车;2、支架;3、工作台;4、底座;5、伺服电机;6、转轴;7、轴承;8、一号锥形齿轮;9、二号锥形齿轮;10、转盘;11、环形滑块;12、支杆;13、调节板;14、摄像头;15、一号连接座;16、二号连接座;17、一号螺纹杆;18、二号螺纹杆;19、螺纹套筒;20、蝶型把手;21、钢化玻璃防护罩;22、把手;23、密封条;24、环形轨道;25、滑轮;26、主把手;27、把套;28、灯泡;29、连接轴。
具体实施方式
16.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
17.如图1至图3所示,本实用新型的一种安防巡逻机器人,包括遥控车1、支架2、工作台3和底座4,遥控车1的顶端连接支架2的底端,支架2的顶端连接工作台3的顶端,底座4的底端连接工作台3的顶端,工作台3的内部有腔室,工作台3的顶端有圆形凹槽,圆形凹槽的内壁设置有环形滑槽;还包括伺服电机5、转轴6、轴承7、一号锥形齿轮8、二号锥形齿轮9、转盘10、环形滑块11、支杆12、调节板13、摄像头14、连接轴29和角度调整装置,伺服电机5的底端连接工作台3的顶端,轴承7的右端连接腔室的右端,伺服电机5的输出端连接转轴6的左端,转轴6的右端从底座4的左端延伸至腔室中并且转动连接轴承7,转轴6在腔室中连接一号锥形齿轮8,转盘10的外壁设置有环形滑块11,环形滑块11在环形滑槽中滑动安装,转盘10的底端中心连接连接轴29的顶端,连接轴29的底端从圆形凹槽中延伸至腔室中并且连接二号锥形齿轮9的顶端,一号锥形齿轮8与二号锥形齿轮9啮合,转盘10的顶端连接支杆12的底端,支杆12的顶端铰接调节板13底端左部,调节板13的顶端连接摄像头14的底端,支杆12和调节板13之间安装有角度调整装置,用来调整摄像头14的角度;打开伺服电机5,使转轴6在轴承7的配合下使一号锥形齿轮8转动,从而使一号锥形齿轮8带动二号锥形齿轮9和连接轴29转动,然后使转盘10在环形滑块11的配合下在圆形凹槽中转动,然后在支杆12和调节板13的配合下对摄像头14进行三百六十度的转动调整,然后通过角度调整装置对摄像头14的角度进行再次调整,符合要求后,通过遥控控制遥控车1进行巡逻,摄像头14将监控的画
面通过网络信号反馈到监控室的电脑上,提高了灵活性,提高了便捷性。
18.本实用新型的一种安防巡逻机器人,角度调整装置包括一号连接座15、二号连接座16、一号螺纹杆17、二号螺纹杆18、螺纹套筒19和蝶型把手20,一号连接座15的左端连接支杆12的右端,二号连接座16的顶端连接调节板13的底端,一号螺纹杆17的左端铰接一号连接座15的右端,二号螺纹杆18的右端铰接二号连接座16的底端,一号螺纹杆17和二号螺纹杆18分别与螺纹套筒19螺纹连接,螺纹套筒19上安装有蝶型把手20;根据需求,通过蝶型把手20转动螺纹套筒19,从而使一号螺纹杆17和二号螺纹杆18进行镜像相近或者镜像远离的操作,从而使摄像头14的右端进行角度的降低或升高,提高了灵活性。
19.本实用新型的一种安防巡逻机器人,还包括钢化玻璃防护罩21、把手22和密封条23,工作台3的顶端设置有环形凹槽,密封条23的底端连接环形凹槽的底端,钢化玻璃防护罩21通过环形凹槽卡紧,钢化玻璃防护罩21的左右两端均设置有把手22;通过钢化玻璃防护罩21可以防止外界物体对装置的撞击,提高了防护性。
20.本实用新型的一种安防巡逻机器人,还包括环形轨道24和多个滑轮25,环形轨道24安装在圆形凹槽的底端,多个滑轮25的顶端均连接转盘10的底端,多个滑轮25均在环形轨道24上滑动安装;转盘10转动时,通过环形轨道24和多个滑轮25,可以减少摩擦力,提高了便捷性。
21.本实用新型的一种安防巡逻机器人,还包括主把手26,主把手26的右端连接滑轮25的左端;装置进行搬运移动时,通过主把手26可以进行便捷的移动,提高了便捷性。
22.本实用新型的一种安防巡逻机器人,还包括把套27,把套27套装在主把手26上;通过把套27握住主把手26,可以减少主把手26脱手的情况,提供了实用性。
23.本实用新型的一种安防巡逻机器人,还包括灯泡28,灯泡28安装在工作台3的右端;光线较暗时,打开灯泡28,可以使周围行人注意到,减少磕碰,提高了便捷性。
24.本实用新型的一种安防巡逻机器人,其在工作时,打开伺服电机5,使转轴6在轴承7的配合下使一号锥形齿轮8转动,从而使一号锥形齿轮8带动二号锥形齿轮9和连接轴29转动,然后使转盘10在环形滑块11的配合下在圆形凹槽中转动,然后在支杆12和调节板13的配合下对摄像头14进行三百六十度的转动调整,然后通过蝶型把手20转动螺纹套筒19,从而使一号螺纹杆17和二号螺纹杆18进行镜像相近或者镜像远离的操作,从而使摄像头14的右端进行角度的降低或升高,符合要求后,通过遥控控制遥控车1进行巡逻,摄像头14将拍摄的画面通过网络信号反馈到监控室的电脑上。
25.本实用新型的一种安防巡逻机器人,其安装方式、连接方式或设置方式均为常见机械方式,只要能够达成其有益效果的均可进行实施;本实用新型的一种安防巡逻机器人的遥控车1、伺服电机5和摄像头14为市面上采购,本行业内技术人员只需按照其附带的使用说明书进行安装和操作即可。
26.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1