一种具有抗ESD干扰车载以太网环视系统的制作方法
一种具有抗esd干扰车载以太网环视系统
技术领域
1.本发明涉及车载以太网环视系统,特别是涉及具有抗esd干扰车载以太网环视系统。
背景技术:
2.近年来随着技术的发展进步,推动汽车技术不断改进,辅助驾驶、自动驾驶、无人驾驶推着汽车总线朝着高速、低延时方向前进,因此车载以太网总线成为汽车通信技术的必然选择。现阶段,车载以太网环视系统主要是安装在乘用车在,采用lvds总线的技术进行图像传输。但是支持lvds通讯的线束需要加屏蔽层,所以随着通讯距离增长,线束成本会急速增加。并且在大型卡车、重型卡车时,由于车身较长,lvds在线束较长的传输过程中信号易受导干扰传输图像的质量下降,经常出现画面缺失等现象。另外,一般车载摄像头镜头的设计基本都是采用金属镜筒并表面做阳极氧化处理设计,减少因环境变法对光学镜头的影响。但摄像头是暴露在外面,特别是镜头对esd非常敏感,容易由于静电导致摄像头功能失效或者重启等问题。
技术实现要素:
3.基于现有技术中存在的缺陷,本发明提供一种具有抗esd干扰车载以太网环视系统,至少包括:智能主机、多个车载以太网摄像头、tsn网关,其中,车载以太网摄像头通过车载以太网总线与tsn网关相连接,智能主机通过车载以太网总线与tsn网关相连接;
4.多个车载以太网摄像头采集车身周围图像通过tsn网关发送给智能主机,智能主机调用图像拼接算法对图像进行拼接后形成全景图像并发送显示屏;
5.图像拼接算法至少包括:分别获取相邻车载以太网摄像头的重叠区域,在重叠区域设定若干个关键标定点,分别获取若干个关键标定点在世界坐标系的坐标对应在相邻车载以太网摄像头中重叠像素坐标并进行存储,根据重叠像素坐标对图像进行拼接,对拼接区域进行图像融合处理。
6.一种具有抗esd干扰车载以太网环视系统,进一步可选的,车载以太网摄像头包括鱼眼摄像头;
7.图像拼接算法还包括:对鱼眼镜头的标定获取摄像头的内参和畸变校正系数;
8.通过放置标定点,建立标定点的世界坐标系对应点和相机坐标系的对应点的映射关系,利用透视变换或柱面投影,利用标定的内参和畸变校正系数,获取每个相机的单应性矩阵和外参;
9.在车身周围的地平面设定若干个标定点,通过车摄像以太网摄像头获取若干个标定点的图像,利用单应性矩阵将若干标定点变换至拼接平面上,从拼接平面上获取若个标定点对应的标定点像素坐标,并根据标定点的像素坐标获取重叠区域。
10.一种具有抗esd干扰车载以太网环视系统,进一步可选的,当车载以太网摄像头完成标定后,选定其中一个车载以太网摄像头为基准摄像头,获取其余车载以太网摄像头相
对于基准摄像头的旋转角度,计算其余车载以太网摄像头到基准摄像头的单应性矩阵;
11.一种具有抗esd干扰车载以太网环视系统,进一步可选的,车载摄像头至少包括6个,分别车尾、车头、车身左侧、车身右侧,其中,车头和车尾各一个,车身左侧和车身右侧各2个;
12.车身左侧的二个摄像头分别车身长度的1/4处和3/4处;
13.车身右侧的二个摄像头分别车身长度的1/4处和3/4处;
14.车头摄像头安装车宽度1/2的位置,车位摄像头安装于车身宽度的1/2的位置。
15.一种具有抗esd干扰车载以太网环视系统,进一步可选的,车载以太网摄像头至少包括:镜头本体、前盖外壳,金属件、pcba电路板、后盖外壳,其中,镜头本体安装在前盖外壳中,金属件紧邻镜头本体末端并安装于前盖外壳内,金属件设有通孔;
16.pcba电路板紧邻金属件并安装于前盖外壳内,pcba电路板、金属件通过第一金属连接机构与前盖外壳相连接;
17.后盖外壳通过第二金属连接机构与前盖外壳相连接。
18.一种具有抗esd干扰车载以太网环视系统,进一步可选的,所述镜头本体前端设有镜头,镜头本体末端形状倒梯形圆柱体;
19.前盖外壳内部设有螺纹,镜头本体通过螺纹连接前盖外壳;
20.前盖外壳的内外两侧涂覆一层阳极抗氧化膜。
21.一种具有抗esd干扰车载以太网环视系统,进一步可选的,金属件,金属件的通孔上端呈倒梯形圆柱体;
22.金属件的通孔下端呈原圆柱形,使光纤从通孔下端导入至pcba电路板中;
23.金属件的通孔上端呈倒梯形圆柱体;
24.一种具有抗esd干扰车载以太网环视系统,进一步可选的,所述后盖外壳为圆柱体,内部设有通孔;
25.线束通过通孔接入pcba电路板中的连接器,传入控制命令给摄像头或获取摄像头的图像信号。
26.一种具有抗esd干扰车载以太网环视系统,进一步可选的,第一金属连接机构包括:螺栓或插销;第二金属连接结构包括:螺栓或插销;
27.一种具有抗esd干扰车载以太网环视系统,进一步可选的,线束设有外界静电导线,静电导线与后盖外壳电连接,用于将后盖外壳上的静电导出;
28.镜头本体、前盖外壳连接处设有防水密封圈;
29.前盖外壳、后盖外壳的连接处设有防水密封圈。
30.一种具有抗esd干扰车载以太网环视系统,进一步可选的,pcba电路板设有图像传感器、isp图像处理器和以太网phy连接器;
31.isp图像处理器分别与图像传感器和以太网phy相连接;
32.镜头本体上的镜头将外界光聚焦后通过汇聚至图像传感器中,图像传感器将光信号转化为图像信号后输入至isp图像处理器中进行处理;
33.以太网的phy芯片至少包括1g或10g的电接口的以太网phy芯片;
34.或10g的光纤以太网phy芯片;
35.以太网phy芯片基于专用asic芯片或基于fpga芯片实现。
36.或10g的光纤以太网phy芯片;
37.以太网phy芯片基于专用asic芯片或基于fpga芯片实现。
38.以太网phy芯片的传输协议基于ieee1722 avtp音视频传输协议。
39.有益效果:
40.1.本发明提供的技术方案中,在全景图像拼接的过程中,无需像现有技术中采用的特征点匹配方法选择重叠区域,而是根据实现获取重叠区域的像素坐标进行配准拼接,这样能够最大程度的降低计算量,实现环视拼接画面的实时性。
41.2.本发明提供的技术方案中,镜头本体和前盖外壳、后盖外壳均为金属材料,镜筒的底部采用类似倒圆台型设计。在镜头本体底部和pcba之间放入一金属件,相当于在pcba上方盖了个屏蔽罩,然后将pcba和金属片通过螺丝锁在前盖外壳上形成一个整体,这样能有效的将镜筒上的静电直接导入到外壳上,从而有效的保护静电对光学元件的直接干扰或者损坏。同时金属片同步采用类似倒圆台型设计,配合镜筒本体底部结构,这样可有效的帮助镜筒底部固定和对焦,减小镜筒的位置偏移,提高产品的生产良率和产品的稳定性。
附图说明
42.以下附图仅对本发明做示意性说明和解释,并不限定本发明的范围。
43.图1本发明一实施例中车载以太网摄像头安装于汽车车身周围的示意图。
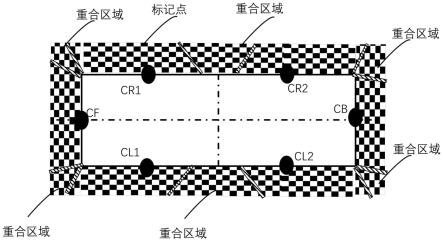
44.图2本发明一实施例中车载以太网摄像头进行标定和标记中棋盘格摆放的示意图。
45.图3为本发明一实施例车载以太网摄像头的剖面结构示意图图。
46.图4为本发明一实施例另一车载以太网摄像头的剖面结构示意图。
47.图5为本发明一实施例车载以太网摄像头中金属件结构剖面示意图。
48.图6为本发明一实施例pcba电路中上的电子元器件结构图。
具体实施方式
49.为了对本文的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式,在各图中相同的标号表示相同的部分。为使图面简洁,各图中的示意性地表示出了与本发明相关部分,而并不代表其作为产品的实际结构。另外,为使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。
50.关于控制系统,功能模块、应用程序(app)本领域技术人员熟知的是,其可以采用任何适当的形式,既可以是硬件也可以是软件,既可以是离散设置的多个功能模块,也可以是集成到一个硬件上的多个功能单元。作为最简单的形式,所述控制系统可以是控制器,例如组合逻辑控制器、微程序控制器等,只要能够实现本技术描述的操作即可。当然,控制系统也可以作为不同的模块集成到一个物理设备上,这些都不偏离本发明的基本原理和保护范围。
51.本发明中“连接”,即可包括直接连接、也可以包括间接连接、通信连接、电连接,特别说明除外。
52.本文中所使用的术语仅为了描述特定实施方案的目的并且不旨在限制本公开。如
本文中所使用地,单数形式“一个”、“一种”、以及“该”旨在也包括复数形式,除非上下文明确地另作规定。还将理解的是,当在说明书中使用时,术语“包括”和/或“包含”是指存在有所陈述的特征、数值、步骤、操作、元件和/或组分,但是并不排除存在有或额外增加一个或多个其它的特征、数值、步骤、操作、元件、组分和/或其组成的群组。作为在本文中所使用的,术语“和/或”包括列举的相关项的一个或多个的任何和全部的组合
53.应当理解,此处所使用的术语“车辆”或“车辆的”或其它类似术语一般包括机动车辆,例如包括运动型多用途车辆(suv)、公共汽车、卡车、各种商用车辆的乘用汽车,包括各种舟艇、船舶的船只,航空器等等,并且包括混合动力车辆、电动车辆、可插式混合动力电动车辆、氢动力车辆以及其它替代性燃料车辆(例如源于非石油的能源的燃料)。正如此处所提到的,混合动力车辆是具有两种或更多动力源的车辆,例如汽油动力和电力动力两者的车辆。
54.此外,本公开的控制器可被具体化为计算机可读介质上的非瞬态计算机可读介质,该计算机可读介质包含由处理器、控制器或类似物执行的可执行程序指令。计算机可读介质的示例包括,但不限于,rom、ram、光盘(cd)-rom、磁带、软盘、闪存驱动器、智能卡和光学数据存储设备。计算机可读记录介质也可分布在通过网络耦合的计算机系统中,使得计算机可读介质例如通过远程信息处理服务器或控制器区域网络(can)以分布式方式存储和执行。
55.本发明提供一种具有抗esd干扰车载以太网环视系统,图1至图2,至少包括:智能主机、多个车载以太网摄像头、tsn网关,其中,车载以太网摄像头通过车载以太网总线与tsn网关相连接,智能主机通过车载以太网总线与tsn网关相连接;
56.多个车载以太网摄像头采集车身周围图像通过tsn网关发送给智能主机,智能主机调用图像拼接算法对图像进行拼接后形成全景图像并发送显示屏;
57.具体地,参见图1车载摄像头至少包括6个,分别车尾、车头、车身左侧、车身右侧,其中,车头和车尾各一个,车身左侧和车身右侧各2个;
58.车身左侧的二个摄像头分别安装于车身长度的1/4处和3/4处;
59.车身右侧的二个摄像头分别安装于车身长度的1/4处和3/4处;
60.车头摄像头安装车宽度1/2的位置,车尾摄像头安装于车身宽度的1/2的位置。图1中,由于大型汽车车身非常长,长度甚至有超过50米的。因此,需要增加长度方向的摄像头,而大型汽车宽度受限于马路宽度,一个大可视角度的摄像头足以覆盖。因此,本实施例中摄像头的分布方式为:cf、cb摄像头分别安装在汽车的前端和后端,cr1、cr2、cl1、cl2分别安装车身右侧长度的1/4和3/4,车身左侧长度的1/4和3/4。
61.图像拼接算法至少包括:分别获取相邻车载以太网摄像头的重叠区域,在重叠区域设定若干个关键标定点,分别获取若干个关键标定点在世界坐标系的坐标对应在相邻车载以太网摄像头中重叠像素坐标并进行存储,根据重叠像素坐标对图像进行拼接,对拼接区域进行图像融合处理。
62.车载以太网摄像头包括鱼眼摄像头或球面镜头或普通镜头;
63.图像拼接算法还包括:对鱼眼镜头的标定获取摄像头的内参和畸变校正系数;
64.若采用鱼眼镜头和球面镜头,需要进行畸变校正。
65.通过放置标定点,建立标定点的世界坐标系对应点和相机坐标系的对应点的映射
关系,利用透视变换或柱面投影,利用标定的内参和畸变校正系数,获取每个相机的单应性矩阵和外参;
66.在车身周围的地平面设定若干个标定点,通过车摄像以太网摄像头获取若干个标定点的图像,利用单应性矩阵将若干标定点变换至拼接平面上,从拼接平面上获取若个标定点对应的标定点像素坐标,并根据标定点的像素坐标获取重叠区域。图2所示,在车身一周放置棋盘格图片,棋盘格由于黑白相间,角点坐标容易被检测到,同时,角点在世界坐标系的坐标也容易构建。相邻摄像头都有公共区域,如cf摄像头分别与cr1和cl1有公共区域,cr1分别与cf和cr2有公共区域,通过建立世界坐标系中角点坐标和像素坐标系的角度坐标,构建点映射关系,从而获取相机内参、外参、畸变系统等参数。
67.当车载以太网摄像头完成标定后,选定其中一个车载以太网摄像头为基准摄像头,获取其余车载以太网摄像头相对于基准摄像头的旋转角度,计算其余车载以太网摄像头到基准摄像头的单应性矩阵;
68.利用透视变换或柱面投影中,根据汽车的形式方向,可以分别选用。如在汽车前进时,选择柱面投影方向成像拼接。当汽车后退时,选择透视变换进行拼接,给司机提供更好的视角。
69.具体地,为了获得较好的成像效果,克服esd的干扰,本实施例对车载以太网摄像头的结构进行了设计,具体改进结构如图3至图6。
70.具体地,具有抗esd干扰的车载以太网摄像头至少包括:
71.镜头本体100、前盖外壳200,金属件300、pcba电路板500、后盖外壳700,其中,镜头本体100安装在前盖外壳200中,金属件300紧邻镜头本体100末端并安装于前盖外壳200内,金属件300设有通孔;
72.pcba电路板500紧邻金属件300并安装于前盖外壳200内,pcba电路板500、金属件300通过第一金属连接机构600与前盖外壳200相连接;
73.后盖外壳700通过第二金属连接机构800与前盖外壳200相连接。
74.具体地,镜头本体、前盖外壳、后盖外壳的材料都是金属材料,是具备导电性的,但是前盖外壳和后盖外壳是需要进行表面处理,否则长期暴露在空气中后会导致表面氧化后被腐蚀,使得摄像头无法防水、防尘。但生产厂家为了节省成本,通常都是对前盖外壳和后盖外壳整体浸没于氧化池进行,如果只做外层,需要把内层进行遮挡,这样导致成本增加非常多,厂家难以承受。这样就是使得即使是前盖外壳和后盖外壳是金属材料,由于表面涂覆阳极氧化层,导致不能导电。因此,外界的静电进入镜头本体后,无法被其迅速导走,静电通过镜头本体100传导至pcba电路板500中的图像传感器400中,使得摄像头成像受到较大干扰,严重可能损坏图像传感器400。为了解决该问题,本实施例通过设置金属件300,金属件300与镜头本体100电连接,并且通过第一金属连接机构600连接pcba电路板500和前盖外壳200,循环将镜头本体100上静电导走。避免镜头受到损害。
75.镜头本体100前端设有镜头,镜头本体100末端形状呈倒梯形圆台体;
76.前盖外壳200内部设有内螺纹,镜头本体100设有外螺纹,通过螺纹连接前盖外壳200。
77.镜头本体100的镜头可以为鱼眼镜头、球形镜头,通过鱼眼镜头和球形镜头,能够获得大视野的角度。
78.前盖外壳200的内外两侧涂覆一层阳极抗氧化膜;
79.参见图5,金属件300,金属件300的通孔上端301呈倒梯形圆柱体;
80.金属件300的通孔下端302呈圆柱形,使光纤从通孔下端302导入至pcba电路板500中;
81.金属件300的通孔上端301的倒梯形圆台,与镜头本体100末端的倒梯形圆台的侧面紧密连接,能够循环将镜头本体的静电导走。
82.另外摄像头中光学对焦是制作的一大难点,精准对焦和牢靠固定将直接影响摄像头正常稳定工作。通过金属件300牢固将镜头本体100、pcba电路板500紧缩在前盖外壳200上,能够提高对焦精准度。在汽车行驶过程中受到震动影响时,车载摄像头也能够具备较好的成像效果。
83.具体地,后盖外壳700为圆柱体,内部设有通孔;
84.线束900通过通孔接入pcba电路板500中的连接器,传入控制命令给摄像头或获取摄像头的图像信号。
85.线束900为以太网线束,采用一对非屏蔽双绞线或多对非屏蔽双绞线;如果以太网phy具备光纤接口,以太网线束为光纤传输介质。
86.具体地,为了将静电迅速导走,在以太网线束可以增加一根地线,地线与后盖外壳700电连接,具体可以为焊接或通过触点连接等形式。线束900设有外界静电导线,静电导线与后盖外壳700电连接,用于将后盖外壳700上的静电导出。
87.第一金属连接机构600包括:螺栓或插销;第二金属连接结构800包括:
88.螺栓或插销;
89.镜头本体100、前盖外壳200连接处设有防水密封圈;
90.前盖外壳200、后盖外壳700的连接处设有防水密封圈。
91.如图6,pcba电路板500设有图像传感器400、isp图像处理器和以太网phy连接器;
92.isp图像处理器分别与图像传感器400和以太网phy相连接;
93.镜头本体100上的镜头将外界光聚焦后通过汇聚至图像传感器400中,图像传感器400将光信号转化为图像信号后输入至isp图像处理器中进行处理。
94.以太网的phy芯片至少包括1g或10g的电接口的以太网phy芯片;
95.或10g的光纤以太网phy芯片;
96.以太网phy芯片基于专用asic芯片或基于fpga芯片实现。
97.以太网phy芯片的传输协议基于ieee1722 avtp音视频传输协议。
98.以上所述的仅是本发明的优选实施方式,本发明不限于以上实施例。本领域的技术人员可以清楚,该实施例中的形式不局限于此,同时可调整方式也不局限于此。可以理解,本领域技术人员在不脱离本发明的基本构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1