作物收割机的制作方法
1.本发明涉及将田地的作物收割的作物收割机。
背景技术:
2.[背景技术1]在作为作物收割机的一例的毛豆收割机中,有具备专利文献1所公开那样的结构的。专利文献1中,具备左右第1搬运体、第2搬运体、分离部,前述左右第1搬运体将田地的作物从左侧及右侧夹持,从田地抬起,向后侧搬运,前述第2搬运体保持横倒姿势的作物的株干,向后侧搬运,前述分离部从被第2搬运体搬运的作物将果实分离。
[0003]
由此,在专利文献1中,借助第1搬运体,田地的起立姿势的作物被夹持而被抬起,作物被第1搬运体搬运的同时逐渐姿势改变成横倒姿势。
[0004]
在第1搬运体的搬运终端部,作物呈横倒姿势,横倒姿势的作物被从第1搬运体的搬运终端部交接至第2搬运体的搬运始端部。借助第2搬运体,作物被以横倒姿势向后侧搬运,借助第2搬运体搬运作物的同时,借助分离部将果实从作物分离,被分离的果实被回收。
[0005]
根据专利文献1,构成为,第1搬运体的搬运始端部被绕上下方向的轴心旋转驱动,田地的起立姿势的作物被第1搬运体夹持。第1搬运体的搬运终端部被绕左右方向的轴心旋转驱动,在第1搬运体的搬运终端部,作物的姿势改变成横倒姿势。
[0006]
由此,在第1搬运体的搬运始端部及搬运终端部,呈第1搬运体被旋转驱动的轴心正交的状态,呈第1搬运体被从搬运始端部遍及至搬运终端部地扭转的状态。
[0007]
[背景技术2]在作为作物收割机的一例的毛豆收割机中,有具备专利文献1所公开的那样的结构的。在专利文献1中,具备左右第1搬运体、第2搬运体、分离部,前述左右第1搬运体将田地的作物从左侧及右侧夹持,从田地抬起,向后侧搬运,前述第2搬运体保持横倒姿势的作物的株干,向后侧搬运,前述分离部从被第2搬运体搬运的作物将果实分离。
[0008]
由此,在专利文献1中,在收割部处,借助第1搬运体,田地的起立姿势的作物被夹持而被抬起,作物被第1搬运体搬运的同时逐渐姿势改变成横倒姿势。
[0009]
在第1搬运体的搬运终端部,作物呈横倒姿势,横倒姿势的作物被从第1搬运体的搬运终端部交接至第2搬运体的搬运始端部。借助第2搬运体,作物被以横倒姿势向后侧搬运,借助第2搬运体搬运作物的同时,借助分离部将果实从作物分离,被分离的果实被回收。
[0010]
根据专利文献1,构成为,在收割部处,第1搬运体的搬运始端部被绕上下方向的轴心旋转驱动,田地的起立姿势的作物被第1搬运体夹持。第1搬运体的搬运终端部被绕左右方向的轴心旋转驱动,在第1搬运体的搬运终端部,作物的姿势改变成横倒姿势。
[0011]
由此,在第1搬运体的搬运始端部及搬运终端部,呈第1搬运体被旋转驱动的轴心正交的状态,呈第1搬运体被从搬运始端部遍及至搬运终端部地扭转的状态。
[0012]
[背景技术3]在作为作物收割机的一例的毛豆收割机中,有具备专利文献1所公开的那样的结构的。
在专利文献1中,具备将田地的作物收割的收割部、将被收割部收割的作物以横倒姿势夹持来向后侧搬运的搬运体、配置于搬运体的右侧的分离部。
[0013]
在专利文献1中,在分离部设置有被绕俯视时与搬运体交叉的方向的轴心旋转驱动的旋转体。随着作物被搬运体搬运,旋转的旋转体碰撞作物,果实被从作物分离而被回收。
[0014]
专利文献1:日本特开2000-201519号公报。
技术实现要素:
[0015]
[问题1]相对于[背景技术1]的问题如下所述。
[0016]
在专利文献1中,作物被第1搬运体搬运的情况下,作物被向后侧搬运的同时,作物的姿势被从起立姿势改变成横倒姿势,所以有基于第1搬运体的作物的夹持及搬运不被稳定地进行的可能性。
[0017]
如前所述,借助第1搬运体夹持作物来搬运的情况下,为使作物的夹持被切实地进行,需要设置将第1搬运体的作物的夹持部分从作物的相反侧支承的辊、引导件等。
[0018]
然而,像专利文献1那样,若第1搬运体呈被以从搬运始端部遍及至搬运终端部地扭转的状态,则难以设置前述的辊、引导件等。若前述的辊、引导件等较少(无法设置),则有基于第1搬运体的作物的夹持及搬运不被稳定地进行的可能性。
[0019]
本发明的目的在于,构成为,在具备第1搬运体及第2搬运体、分离部的作物收割机中,基于第1搬运体的作物的夹持及搬运被稳定地进行。
[0020]
[问题2]相对于[背景技术2]的问题如下所述。
[0021]
在专利文献1中,在收割部中,在作物被第1搬运体搬运的情况下,作物被向后侧搬运的同时,作物的姿势被从起立姿势改变成横倒姿势,所以有基于第1搬运体的作物的夹持及搬运不被稳定地进行的可能性。
[0022]
如前所述,在收割部处,借助第1搬运体夹持作物来搬运的情况下,为使作物的夹持被切实地进行,需要设置将第1搬运体的作物的夹持部分从作物的相反侧支承的辊、引导件等。
[0023]
然而,像专利文献1那样,若第1搬运体呈被以从搬运始端部遍及至搬运终端部地扭转的状态,则难以设置前述的辊、引导件等。若前述的辊、引导件等较少(无法设置),则有基于第1搬运体的作物的夹持及搬运不被稳定地进行的可能性。
[0024]
本发明的目的在于,构成为,在具备具有第1搬运体的收割部、第2搬运体及分离部的作物收割机中,基于第1搬运体的作物的夹持及搬运被稳定地进行。
[0025]
[问题3]相对于[背景技术3]的问题如下所述。
[0026]
在专利文献1中,果实被从作物分离而被回收的情况下,在作物的株干被搬运体夹持的状态下,从旋转体向作物的上部(带有果实的部分)进行较大的分离作用。
[0027]
由此,例如茎等较弱的作物中,有作物的茎弯折的可能性,若作物的茎弯折,则作物的姿势从横倒姿势例如较大地变为向下,旋转体不会适当地与作物碰撞,有不能适当地
进行从作物分离果实的可能性。
[0028]
本发明的目的在于,在由收割部收割的作物的株干以横倒姿势被搬运体夹持而作物被搬运体以横倒姿势搬运且借助分离部将果实从作物分离来回收的作物收割机中,实现基于分离部的果实从作物分离的分离性能的提高。
[0029]
与[问题1]对应的解决方案如下所述。
[0030]
本发明的作物收割机的特征在于,具备左右第1搬运体、第2搬运体、分离部,前述左右第1搬运体被绕沿斜向的上下方向的轴心旋转驱动,将田地的作物从左侧及右侧夹持地从田地抬起,将抬起的作物维持成起立姿势的同时向斜上侧的后侧搬运,前述第2搬运体被绕左右方向的轴心地旋转驱动,保持横倒姿势的作物的株干,向后侧搬运,前述分离部配置于前述第2搬运体的右侧或左侧,将果实从被前述第2搬运体搬运的作物分离,具备姿势改变部,前述姿势改变部将来自前述第1搬运体的搬运终端部的作物的姿势改变成,作物的带有果实的部分相对于作物的株干为距前述分离部较近的一侧的横倒姿势,姿势被改变成横倒姿势的作物的株干被前述第2搬运体保持。
[0031]
根据本发明,田地的起立姿势的作物被左右第1搬运体从左侧及右侧夹持而被从田地抬起,作物维持起立姿势的同时被向后侧搬运。
[0032]
若起立姿势的作物到达第1搬运体的搬运终端部,则在从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分,起立姿势的作物姿势改变成横倒姿势,被向第2搬运体的搬运始端部交接。
[0033]
姿势改变成横倒姿势的作物被第2搬运体搬运,借助分离部从被第2搬运体搬运的作物分离果实,被分离的果实被回收。
[0034]
如上所述,根据本发明,田地的起立姿势的作物被第1搬运体从田地抬起后,作物维持起立姿势的同时被向后侧搬运,所以基于第1搬运体的作物的夹持及搬运被稳定地进行。由此,能够使作物收割机的收割性能提高。
[0035]
根据本发明,第1搬运体不呈从搬运始端部遍及至搬运终端部地扭转的状态,所以能够轻易地将第1搬运体的作物的夹持部分设置成从作物的相反侧支承的辊、引导件等。在这方面,基于第1搬运体的作物的夹持及搬运也被稳定地进行,所以是有利的。
[0036]
在从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分,起立姿势的作物姿势改变成横倒姿势,在被向第2搬运体的搬运始端部交接的情况下,根据本发明,具备将起立姿势的作物姿势改变成横倒姿势的姿势改变部。
[0037]
由此,起立姿势的作物被轻易地姿势改变成横倒姿势,被向第2搬运体的搬运始端部交接,从第1搬运体的搬运终端部向第2搬运体的搬运始端部的作物的交接被顺畅地进行,能够使作物收割机的收割性能提高。
[0038]
在本发明中,优选的是,前述姿势改变部被跨前述第1搬运体的搬运终端部的上侧的位置、从前述第1搬运体的搬运终端部向后侧离开的位置地配置。
[0039]
根据本发明,作物被从第1搬运体的搬运终端部向第2搬运体的搬运始端部交接时,姿势改变部作用于作物的距第1搬运体的搬运终端部靠上侧的部分,借助姿势改变部,起立姿势的作物被轻易地姿势改变成横倒姿势。
[0040]
在本发明中,优选的是,前述姿势改变部配置成从前述第1搬运体的搬运终端部的上侧的位置在侧视观察时斜向上。
[0041]
第1搬运体构成为将作物维持成起立姿势的同时向斜上侧的后侧搬运,所以根据本发明,能够根据第1搬运体的作物的搬运的流程使姿势改变部向作物作用,借助姿势改变部将起立姿势的作物轻易地姿势改变成横倒姿势。
[0042]
在本发明中,优选的是,前述姿势改变部俯视观察时与前述第2搬运体的搬运始端部重叠。
[0043]
根据本发明,从作物被向第2搬运体的搬运始端部交接中,姿势改变部也作用于作物,借助姿势改变部轻易地将起立姿势的作物的姿势改变成横倒姿势。
[0044]
在本发明中,优选的是,侧视观察时在前述第1搬运体的搬运终端部和前述姿势改变部之间的位置具备将作物的茎部向前述第2搬运体的搬运始端部侧导引的茎部引导部。
[0045]
根据本发明,作物被从第1搬运体的搬运终端部向第2搬运体的搬运始端部交接时,作物的茎部被茎部引导部向第2搬运体的搬运始端部侧导引,所以作物的株干难以从第2搬运体的搬运始端部远离。
[0046]
由此,能够借助第2搬运体的搬运始端部使作物的株干的保持的切实性提高,能够顺畅地进行从第1搬运体的搬运终端部向第2搬运体的搬运始端部的作物的交接,能够使作物收割机的收割性能提高。
[0047]
在本发明中,优选的是,侧视观察时在前述姿势改变部的上侧的位置具备将作物的上部向前述第2搬运体的搬运始端部侧导引的上部引导部。
[0048]
根据本发明,作物被从第1搬运体的搬运终端部向第2搬运体的搬运始端部交接时,姿势改变部从作物的第1搬运体的搬运终端部作用于上侧的部分,并且上部引导部作用于作物的姿势改变部的上侧的部分,所以借助姿势改变部及上部引导部,起立姿势的作物被轻易地姿势改变成横倒姿势。
[0049]
在本发明中,优选的是,在前述姿势改变部设置有引导部、环状转动体、爪体,前述引导部被从前述第1搬运体的搬运终端部向前述第2搬运体的搬运始端部以俯视观察时倾斜的方式被倾斜地配置,前述环状转动体被绕沿上下方向的轴心旋转驱动,沿前述引导部从前述第1搬运体的搬运终端部侧向前述第2搬运体的搬运始端部侧移动,前述爪体被沿前述环状转动体的移动方向隔开既定间隔地安装于前述环状转动体,随着前述环状转动体的旋转,将作物从前述第1搬运体的搬运终端部侧向前述第2搬运体的搬运始端部侧推动操作。
[0050]
根据本发明,姿势改变部的爪体(环状转动体)沿引导部移动,由此作物被从第1搬运体的搬运终端部侧向第2搬运体的搬运始端部侧推动操作,同时借助姿势改变部的引导部,起立姿势的作物被姿势改变成横倒姿势。
[0051]
由此,作物被从第1搬运体的搬运终端部向第2搬运体的搬运始端部交接时,作物不会在姿势改变部滞留,能够借助姿势改变部将起立姿势的作物轻易地姿势改变成横倒姿势。
[0052]
在本发明中,优选的是,具备分配传动部、传动部、下侧传动轴、上侧传动轴,前述分配传动部配置于前述第1搬运体的搬运终端部和前述姿势改变部之间,前述传动部相对于借助前述第1搬运体夹持作物的部分从外侧的位置向前述分配传动部传递动力,前述下侧传动轴将被向前述分配传动部传递的动力向位于前述分配传动部的下侧的前述第1搬运体传递,前述上侧传动轴将被向前述分配传动部传递的动力向位于前述分配传动部的上侧
的前述姿势改变部传递。
[0053]
根据本发明,姿势改变部被配置于第1搬运体的搬运终端部的上侧的位置的情况下,将姿势改变部和第1搬运体的搬运终端部之间的空间有效地利用,能够将向姿势改变部及第1搬运体的传动系统紧凑地配置,在传动系统的构造的简单化的方面是有利的。
[0054]
根据本发明,在第1搬运体的搬运终端部的上侧配置传动系统,在第1搬运体的搬运终端部的下侧不配置传动系统。
[0055]
由此,在起立姿势的作物被姿势改变成横倒姿势的部位,在作物的株干的附近不配置传动系统,所以借助姿势改变部,起立姿势的作物被轻易地姿势改变成横倒姿势。
[0056]
本发明的作物收割机的特征在于,具备左右第1搬运体、第2搬运体、引导轨道,前述左右第1搬运体被绕沿斜向的上下方向轴心旋转驱动,将田地的作物从左侧及右侧夹持地从田地抬起,将抬起的作物维持成起立姿势的同时向斜上侧的后侧搬运,前述第2搬运体被绕左右方向的轴心地旋转驱动,从前述第1搬运体的搬运终端部向后侧伸出,前述引导轨道沿前述第2搬运体的上侧向后侧伸出,被从前述第1搬运体的搬运终端部姿势改变成横倒姿势的作物的株干被夹持于前述第2搬运体和前述引导轨道之间,被前述第2搬运体向后侧搬运,还具备分离部,前述分离部配置于前述第2搬运体的右侧或左侧,将果实从被前述第2搬运体搬运的作物分离,配置前述第2搬运体,使得相对于从左右前述第1搬运体的互相相向地接触的部分沿前述第1搬运体的搬运方向伸出的假想线,俯视观察时前述第2搬运体的搬运始端部的左右中央部位移至距前述分离部较近的一侧的位置。
[0057]
根据本发明,借助左右第1搬运体,田地的起立姿势的作物被从左侧及右侧夹持而被从田地抬起,作物在被维持成起立姿势的同时被向后侧搬运。
[0058]
如起立姿势的作物到达第1搬运体的搬运终端部,则在从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分,起立姿势的作物被姿势改变成横倒姿势,被向第2搬运体的搬运始端部交接。
[0059]
被姿势改变成横倒姿势的作物被第2搬运体搬运,从被第2搬运体搬运的作物,果实被分离部分离,被分离的果实被回收。
[0060]
如上所述,根据本发明,田地的起立姿势的作物被第1搬运体从田地抬起后,作物被维持成起立姿势,同时被向后侧搬运,所以基于第1搬运体的作物的夹持及搬运被稳定地进行。由此,能够使作物收割机的收割性能提高。
[0061]
根据本发明,不呈第1搬运体从搬运始端部遍及至搬运终端部地扭转的状态,所以能够轻易地设置将第1搬运体的作物的夹持部分从作物的相反侧支承的辊、引导件等。在这方面,基于第1搬运体的作物的夹持及搬运也被稳定地进行,所以是有利的。
[0062]
根据本发明,相对于被绕左右方向的轴心旋转驱动的第2搬运体,引导轨道沿第2搬运体的上侧伸出,横倒姿势的作物的株干被夹持于第2搬运体和引导轨道之间,作物被第2搬运体搬运。
[0063]
根据本发明,相对于左右第1搬运体的互相相向地接触的部分,第2搬运体被向距分离部较近的一侧(分离部侧)稍微位移地配置。
[0064]
由此,相对于从第1搬运体的搬运终端部向分离部侧姿势改变成横倒姿势的作物,第2搬运体在左右方向上不从作物的株干脱离,能够使基于第2搬运体和引导轨道的作物的株干的夹持的切实性提高。
[0065]
在本发明中,优选的是,前述引导轨道的距前述分离部较近的一侧的侧面被配置于,俯视观察时前述第2搬运体的距前述分离部较近的一侧的侧面和较远的一侧的侧面之间,前述引导轨道的距前述分离部较远的一侧的侧面俯视观察时相对于前述第2搬运体的距前述分离部较远的一侧的侧面,被配置于距前述分离部较远的一侧。
[0066]
根据本发明,上侧的引导轨道向相对于下侧的第2搬运体向距分离部较远的一侧(分离部的相反侧)位移。
[0067]
由此,在从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分,即使作物呈作物的上部相对于作物的株干位于稍高的位置的倾斜的姿势,上侧的引导轨道也呈向比下侧的第2搬运体向作物的上部离开的一侧位移的状态,由此,倾斜的姿势的作物的株干被轻易地夹持于第2搬运体和引导轨道之间,能够使基于第2搬运体和引导轨道的作物的株干的夹持的切实性提高。
[0068]
在本发明中,优选的是,前述第1搬运体的搬运终端部和前述第2搬运体的搬运始端部被配置成俯视观察时重叠,前述第2搬运体的搬运始端部在侧视观察时配置于前述第1搬运体的搬运终端部的下侧的位置,前述引导轨道的搬运始端部配置于前述第1搬运体的搬运终端部的后侧的位置。
[0069]
根据本发明,由于第1搬运体的搬运终端部和第2搬运体的搬运始端部在俯视观察时重叠、及第2搬运体的搬运始端部在侧视观察时配置于第1搬运体的搬运终端部的下侧的位置,作物被从第1搬运体的搬运终端部向第2搬运体的搬运始端部交接时,作物能够呈与第1搬运体的搬运终端部及第2搬运体的搬运始端部的两方接触的状态。由此,能够使从第1搬运体的搬运终端部向第2搬运体的搬运始端部的作物的交接的切实性提高。
[0070]
该情况下,根据本发明,引导轨道的搬运始端部配置于第1搬运体的搬运终端部的后侧的位置,所以能够避免第1搬运体的搬运终端部和引导轨道的搬运始端部的接触的同时如前所述地将第1搬运体的搬运终端部及第2搬运体的搬运始端部轻易地配置。
[0071]
在本发明中,优选的是,具备株干引导部,前述株干引导部在前述第2搬运体的搬运始端部被沿前述第2搬运体的距前述分离部较远的一侧的侧面配置,防止作物的株干从前述第2搬运体的搬运始端部离开。
[0072]
如前所述,若引导轨道的搬运始端部被配置于第1搬运体的搬运终端部的后侧的位置,则在第2搬运体的搬运始端部,产生不存在引导轨道的部分。
[0073]
根据本发明,在第2搬运体的搬运始端部,借助株干引导部防止作物的株干从第2搬运体的搬运始端部离开的状态,所以从作物被向第2搬运体的搬运始端部交接至作物的株干被夹持于第2搬运体和引导轨道之间,能够实现作物的搬运的稳定化。
[0074]
根据本发明,株干引导部被沿第2搬运体的距分离部较远的一侧的侧面配置,所以株干引导部不会成为作物被向分离部侧姿势改变成横倒姿势时的阻碍。
[0075]
在本发明中,优选的是,将作物的株干从下侧接住来向后侧导引的株干支承部相对于前述第2搬运体的搬运始端部配置于俯视观察时距前述分离部较远的一侧的位置。
[0076]
根据本发明,作物被向分离部侧姿势改变成横倒姿势时,能够借助株干支承部接住作物的株干而使其不会下落,所以促进作物向横倒姿势的姿势改变,能够使作物从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接的切实性提高。
[0077]
与[问题2]对应的解决方案如下所述。
[0078]
本发明的作物收割机的特征在于,具备机体、收割部、第2搬运体,前述机体被行进装置支承,前述收割部具有左右第1搬运体,前述左右第1搬运体被绕沿斜向的上下方向的轴心旋转驱动,将田地的作物从左侧及右侧夹持地从田地抬起,将抬起的作物维持成起立姿势的同时向斜上侧的后侧搬运,前述第2搬运体被绕左右方向的轴心地旋转驱动,保持横倒姿势的作物的株干,向后侧搬运,从前述第1搬运体的搬运终端部姿势改变成横倒姿势的作物的株干被保持于前述第2搬运体,被前述第2搬运体向后侧搬运,具备分离部,前述分离部被配置于前述第2搬运体的右侧或左侧,将果实从被前述第2搬运体搬运的作物分离,具备摆动支点部、摆动支承部、升降机构,前述摆动支点部与前述收割部的后部的上部连结,向上侧伸出,前述摆动支承部与前述机体连结,绕左右方向的支承轴心将前述摆动支点部上下摆动自如地支承,前述升降机构被遍及前述收割部和前述机体地连接,将前述收割部升降操作。
[0079]
根据本发明,在收割部,借助左右第1搬运体,田地的起立姿势的作物被从左侧及右侧夹持而被从田地抬起,作物在被维持成起立姿势的同时被向后侧搬运。
[0080]
若起立姿势的作物到达第1搬运体的搬运终端部,则在从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分,起立姿势的作物被姿势改变成横倒姿势,被向第2搬运体的搬运始端部交接。
[0081]
被姿势改变成横倒姿势的作物被第2搬运体搬运,在分离部,果实被从被第2搬运体搬运的作物分离,被分离的果实被回收。
[0082]
如上所述,根据本发明,在收割部中,田地的起立姿势的作物被第1搬运体从田地抬起后,作物在被维持成起立姿势的同时被向后侧搬运,所以基于第1搬运体的作物的夹持及搬运被稳定地进行。由此,能够使作物收割机的收割性能提高。
[0083]
根据本发明,在收割部,第1搬运体从搬运始端部遍及至搬运终端部地不为扭转的状态,所以能够轻易地设置将第1搬运体的作物的夹持部分从作物的相反侧支承的辊、引导件等。在这方面,基于第1搬运体的作物的夹持及搬运也被稳定地进行,所以是有利的。
[0084]
在作物收割机中,具备将收割部升降自如地支承于机体来将收割部升降操作的升降机构,将收割部上升操作,由此有轻易地进行田地上的转弯行进、路上行进的情况。
[0085]
根据本发明,呈收割部绕从收割部的后部向上侧离开的支承轴心上下摆动的状态,呈收割部被升降机构升降操作的状态。作物被第1搬运体向斜上侧的后侧搬运,由此在将收割部下降操作的状态下,收割部在侧视观察时被配置成前部较低而后部较高的倾斜的姿势。
[0086]
由此,在加固收割部下降操作的状态下,将第1搬运体的搬运终端部和第2搬运体的搬运始端部的位置关系适当地设定即可。
[0087]
根据根据本发明,在前述的状态下,若将收割部上升操作,则绕从收割部的后部向上侧离开的支承轴心,收割部向上侧摆动,由此,呈收割部的后部(第1搬运体的搬运终端部)从第2搬运体的搬运始端部向前侧离开的状态。
[0088]
若将收割部下降操作,则绕从收割部的后部向上侧离开的支承轴心,收割部向下侧摆动,收割部的后部(第1搬运体的搬运终端部)向后侧移动而接近第2搬运体的搬运始端部,第1搬运体的搬运终端部和第2搬运体的搬运始端部恢复前述适当的位置关系。
[0089]
如上所述,根据本发明,避免收割部的后部(第1搬运体的搬运终端部)和第2搬运
体的搬运始端部的接触且确保第1搬运体的搬运终端部和第2搬运体的搬运始端部的适当的位置关系的同时,能够进行收割部的升降操作,能够使作物收割机的收割性能提高。
[0090]
在本发明中,优选的是,具备与前述收割部的后部的右部的上部连结而向上侧伸出的右前述摆动支点部、将右前述摆动支点部绕前述支承轴心上下摆动自如地支承的右前述摆动支承部,具备与前述收割部的后部的左部的上部连结而向上侧伸出的左前述摆动支点部、将左前述摆动支点部绕前述支承轴心上下摆动自如地支承的左前述摆动支承部,在右前述摆动支点部及右前述摆动支承部、左前述摆动支点部及左前述摆动支承部之间具备作物通过的通路。
[0091]
根据本发明,作物被第1搬运体在收割部向后侧搬运的情况下,若作物到达第1搬运体的搬运终端部,则作物穿过右摆动支点部及右摆动支承部和左摆动支点部及左摆动支承部之间的通路被向后侧搬运,在从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分,起立姿势的作物被姿势改变成横倒姿势,被向第2搬运体的搬运始端部交接。
[0092]
如上所述,不会被摆动支点部及摆动支承部扰乱,作物被轻易地从第1搬运体的搬运终端部向第2搬运体的搬运始端部搬运。
[0093]
根据本发明,收割部的后部被在右摆动支点部及右摆动支承部、左摆动支点部及左摆动支承部的两个部位摆动自如地支承,所以在收割部的支承强度的方面是有利的。
[0094]
在本发明中,优选的是,在前述摆动支点部设置有驱动轴和传动轴,前述驱动轴被沿上下方向地配置,将前述第1搬运体旋转驱动,前述传动轴相对于借助前述第1搬运体夹持作物的部分从外侧的位置向前述驱动轴传递动力。
[0095]
根据本发明,有效利用收割部的后部的上侧的空间及摆动支点部,能够将向第1搬运体的传动系统紧凑地配置,在向第1搬运体的传动系统的构造的简单化的方面是有利的。
[0096]
根据本发明,在收割部的后部(第1搬运体的搬运终端部)的上侧配置向第1搬运体的传动系统,在收割部的后部(第1搬运体的搬运终端部)的下侧未配置向第1搬运体的传动系统。
[0097]
由此,在起立姿势的作物被姿势改变成横倒姿势的部位,在作物的株干的附近未配置向第1搬运体的传动系统,所以起立姿势的作物轻易地姿势改变横倒姿势。
[0098]
在本发明中,优选的是,具备姿势改变部,前述姿势改变部与前述摆动支点部的上部连结,将来自前述第1搬运体的搬运终端部的作物的姿势改变成,作物的带有果实的部分相对于作物的株干呈距前述分离部较近的一侧的横倒姿势,被姿势改变成横倒姿势的作物的株干被保持于前述第2搬运体。
[0099]
在从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分,起立姿势的作物被姿势改变横倒姿势,被向第2搬运体的搬运始端部交接的情况下,根据本发明,借助姿势改变部,起立姿势的作物被轻易地姿势改变成横倒姿势,被向第2搬运体的搬运始端部交接,从第1搬运体的搬运终端部向第2搬运体的搬运始端部的作物的交接被顺畅地进行,能够使作物收割机的收割性能提高。
[0100]
根据本发明,姿势改变部连结于摆动支点部的上部,配置于收割部的后部(第1搬运体的搬运终端部)的上侧,所以呈姿势改变部作用于作物的上部的状态,借助姿势改变部,起立姿势的作物被顺畅地姿势改变成横倒姿势。
[0101]
在本发明中,优选的是,在前述姿势改变部设置有引导部、环状转动体、爪体,前述
引导部被从前述第1搬运体的搬运终端部向前述第2搬运体的搬运始端部以俯视观察时倾斜的方式被倾斜地配置,前述环状转动体被绕沿上下方向的轴心旋转驱动,沿前述引导部从前述第1搬运体的搬运终端部侧向前述第2搬运体的搬运始端部侧移动,前述爪体被沿前述环状转动体的移动方向隔开既定间隔地安装于前述环状转动体,随着前述环状转动体的旋转,将作物从前述第1搬运体的搬运终端部侧向前述第2搬运体的搬运始端部侧推动操作。
[0102]
根据本发明,姿势改变部的爪体(环状转动体)沿引导部移动,由此,作物被从第1搬运体的搬运终端部侧向第2搬运体的搬运始端部侧推动操作,同时借助姿势改变部的引导部,起立姿势的作物姿势改变成横倒姿势。
[0103]
由此,作物被从第1搬运体的搬运终端部向第2搬运体的搬运始端部交接时,在姿势改变部,作物不会滞留,借助姿势改变部,起立姿势的作物被轻易地姿势改变成横倒姿势。
[0104]
根据本发明,借助将第1搬运体旋转驱动的驱动轴的动力,姿势改变部的环状转动体被旋转驱动,所以能够把将第1搬运体旋转驱动的驱动轴兼用作姿势改变部的环状转动体的驱动系统,在构造的简单化的方面是有利的。
[0105]
该情况下,摆动支点部被配置于收割部的后部和姿势改变部之间,所以将收割部的后部和姿势改变部之间的空间有效地利用,向摆动支点部、第1搬运体及姿势改变部的环状转动体的传动系统被紧凑地配置。
[0106]
在本发明中,优选的是,具备负荷支承部,前述负荷支承部被遍及前述机体的前述摆动支承部的下侧的部分和前述收割部地连接,允许前述收割部的升降,同时将沿左右方向向前述收割部施加的负荷支承。
[0107]
收割部的后部被上下摆动自如地支承于机体的情况下,根据本发明,遍及机体的摆动支承部的下侧的部分和收割部地连接有负荷支承部,沿左右方向作用于收割部的负荷被负荷支承部支承。
[0108]
由此,能够避免沿左右方向作用于收割部的负荷作用于摆动支点部及摆动支承部,能够实现摆动支点部及摆动支承部的保护。
[0109]
在本发明中,优选的是,在前述负荷支承部设置有第1支承部件和第2支承部件,前述第1支承部件被绕前述机体的左右方向的轴心上下摆动自如地支承,向前侧伸出,前述第2支承部件被绕前述第1支承部件的前部的左右方向的轴心摆动自如地支承,被绕前述收割部的左右方向的轴心摆动自如地连接。
[0110]
在前述那样的负荷支承部处构成为允许收割部的升降的情况下,根据本发明,在负荷支承部设置有摆动自如的第1支承部件及第2支承部件,由此能够轻易地允许收割部的升降。
[0111]
与[问题3]对应的解决方案如下所述。
[0112]
本发明的作物收割机其特征在于,具备收割部、环状的搬运体、引导轨道、分离部,前述收割部收割田地的作物,前述环状的搬运体被绕横向的轴心旋转驱动,前述引导轨道被沿前述搬运体配置,前述分离部配置于前述搬运体的横侧,前述搬运体具有第1突部和第2突部,前述第1突部在前述搬运体的距前述分离部较远的一侧的第1部分,被沿前述搬运体的移动方向隔开第1间隔地设置,向前述引导轨道侧突出,前述第2突部在前述搬运体的距
前述分离部较近的一侧的第2部分,被沿前述搬运体的移动方向隔开第2间隔地设置,向前述引导轨道侧突出,前述第2间隔被设定成比前述第1间隔大,或前述第1间隔被设定成比前述第2间隔大,被前述收割部收割的作物的株干被以横倒姿势夹持于前述搬运体和前述引导轨道之间,通过基于前述搬运体被旋转驱动的前述第1突部及前述第2突部的移动,作物被搬运,果实被从搬运的作物被前述分离部分离而被回收。
[0113]
根据本发明,作物的株干被搬运体及引导轨道夹持的情况下,作物的株干的距分离部较远的部分在搬运体的移动方向上有时位于搬运体的第1突部和第1突部之间。作物的株干的距分离部较近的部分在搬运体的移动方向上有时位于搬运体的第2突部和第2突部之间。作物的株干的距分离部较远的部分及距分离部较近的部分在上下方向上位于搬运体和引导轨道之间。
[0114]
在以上的状态下,搬运体被旋转驱动而搬运体的第1突部及第2突部移动,由此作物被搬运。
[0115]
该情况下,在搬运体的第1突部和第1突部之间、及搬运体的第2突部和第2突部之间,作物的株干被搬运体搬运的同时,能够相对于搬运体沿搬运体的移动方向向上方侧及下方侧移动。
[0116]
在前述的状态下,根据本发明,搬运体的第2突部的第2间隔被设定成比搬运体的第1突部的第1间隔大。或搬运体的第1突部的第1间隔被设定成比搬运体的第2突部的第2间隔大。
[0117]
由此,若搬运体的第2突部的第2间隔被设定成比搬运体的第1突部的第1间隔大,则以搬运体的距分离部较远的一侧的第1部分的附近为支点,作物的株干的距分离部较近的部分能够在搬运体的第2突部和第2突部之间沿搬运体的移动方向向上方侧及下方侧移动。
[0118]
若搬运体的第1突部的第1间隔被设定为比搬运体的第2突部的第2间隔大,则以搬运体的距分离部较近的一侧的第2部分的附近为支点,作物的株干的距分离部较远的部分能够在搬运体的第1突部和第1突部之间沿搬运体的移动方向向上方侧及下方侧移动。
[0119]
根据本发明,作物的株干被搬运体及引导轨道夹持,作物被搬运体以横倒姿势搬运的情况下,作物的上部在维持横倒姿势的同时以搬运体的附近为支点,呈能够相对于搬运体沿搬运体的移动方向向上方侧及下方侧振动的状态。
[0120]
由此,在分离部,即使欲对作物的上部(带有果实的部分)施加较大的分离作用,如前所述,作物的上部也以沿搬运体的移动方向欲向上方侧及下方侧振动的方式移动,由此,能够从作物的上部放出较大的分离作用,能够避免作物的茎弯折那样的状态,能够实现借助分离部从作物分离果实的分离性能的提高。
[0121]
若前述那样的相对于搬运体的作物的上部的移动过大,则有难以从作物分离果实的可能性。
[0122]
根据本发明,作物的株干的移动在搬运体的第1突部和第1突部之间、搬运体的第2突部和第2突部之间被抑制,相对于搬运体的作物的上部的移动过大的状态被抑制,所以不会导致借助分离部从作物分离果实的分离性能的下降。
[0123]
在本发明中,优选的是,设定成前述第2间隔比前述第1间隔大。
[0124]
根据本发明,以搬运体的距分离部较远的一侧的第1部分的附近为支点,作物的株
干的距分离部较近的部分能够在搬运体的第2突部和第2突部之间沿搬运体的移动方向向上方侧及下方侧移动能。
[0125]
该情况下,与从搬运体的第2部分至作物的上部的长度相比,从搬运体的第1部分至作物的上部的长度较长,相对于前述的搬运体的作物的上部的移动幅度变大,所以在借助分离部从作物分离果实的分离性能的提高的方面是有利的。
[0126]
在本发明中,优选的是,前述引导轨道被沿前述搬运体的上侧配置,前述引导轨道的距前述分离部较近的一侧的部分俯视观察时被相对于前述第2部分配置于距前述分离部较远的一侧。
[0127]
根据本发明,在搬运体被配置于下侧、引导轨道被配置于上侧的状态下,在搬运体的距分离部较近的一侧的第2部分的正上方,呈引导轨道的距分离部较近的一侧的部分不存在的状态,所以在作物的株干被夹持于搬运体及引导轨道的状态下,作物的上部也容易从横倒姿势向上侧移动。
[0128]
由此,作物的上部能够移动的方向增加,容易在分离部处将较大的分离作用从作物的上部放出,能够避免作物的茎弯折那样的状态,能够实现借助分离部从作物分离果实的分离性能的提高。
[0129]
即使作物的上部从横倒姿势向上侧移动,由于作物的自重,作物也容易恢复成横倒姿势,所以在这方面,也能实现借助分离部的从作物分离的果实的分离性能的提高。
[0130]
在本发明中,优选的是,在前述分离部设置有上旋转体和下旋转体,前述上旋转体被绕俯视观察时与前述搬运体交叉的朝向的上轴心旋转驱动,前述下旋转体在前述上轴心的下侧被绕沿前述上轴心的下轴心旋转驱动,被搬运的作物穿过前述上旋转体和前述下旋转体之间,前述上旋转体及前述下旋转体与作物碰撞,由此,果实被从作物分离。
[0131]
根据本发明,在分离部,上旋转体从上侧与作物碰撞、下旋转体从下侧与作物碰撞,能够在不留有作物的各部的果实的情况下进行分离。
[0132]
根据本发明,作物的上部维持横倒姿势的同时能够沿搬运体的移动方向向上方侧及下方侧移动。由此,通过在分离部设置上旋转体及下旋转体,作物能够在上旋转体和下旋转体之间沿搬运体的移动方向向上方侧及下方侧轻易地移动可能。
[0133]
在本发明中,优先的是,以前述上旋转体及前述下旋转体的前述搬运体侧的部分位于比前述上旋转体及前述下旋转体的前述搬运体的相反侧的部分靠前述搬运体的搬运始端部侧的位置的方式,将前述上旋转体及前述下旋转体相对于前述搬运体在俯视观察时倾斜地配置,在穿过前述上旋转体和前述下旋转体之间的作物被前述上旋转体及前述下旋转体推向前述搬运体的搬运始端部侧的一侧,设定前述上旋转体及前述下旋转体的旋转方向。
[0134]
根据本发明,上旋转体及下旋转体与穿过上旋转体和下旋转体之间的作物碰撞的情况下,以作物的株干被搬运体及引导轨道夹持的状态,产生欲将作物从株干侧(搬运体侧)向上部侧拉出的分力。
[0135]
由此,能够在作物不被向株干侧压缩而压弯从而折弯等的情况下,将果实从作物轻易地分离。
附图说明
[0136]
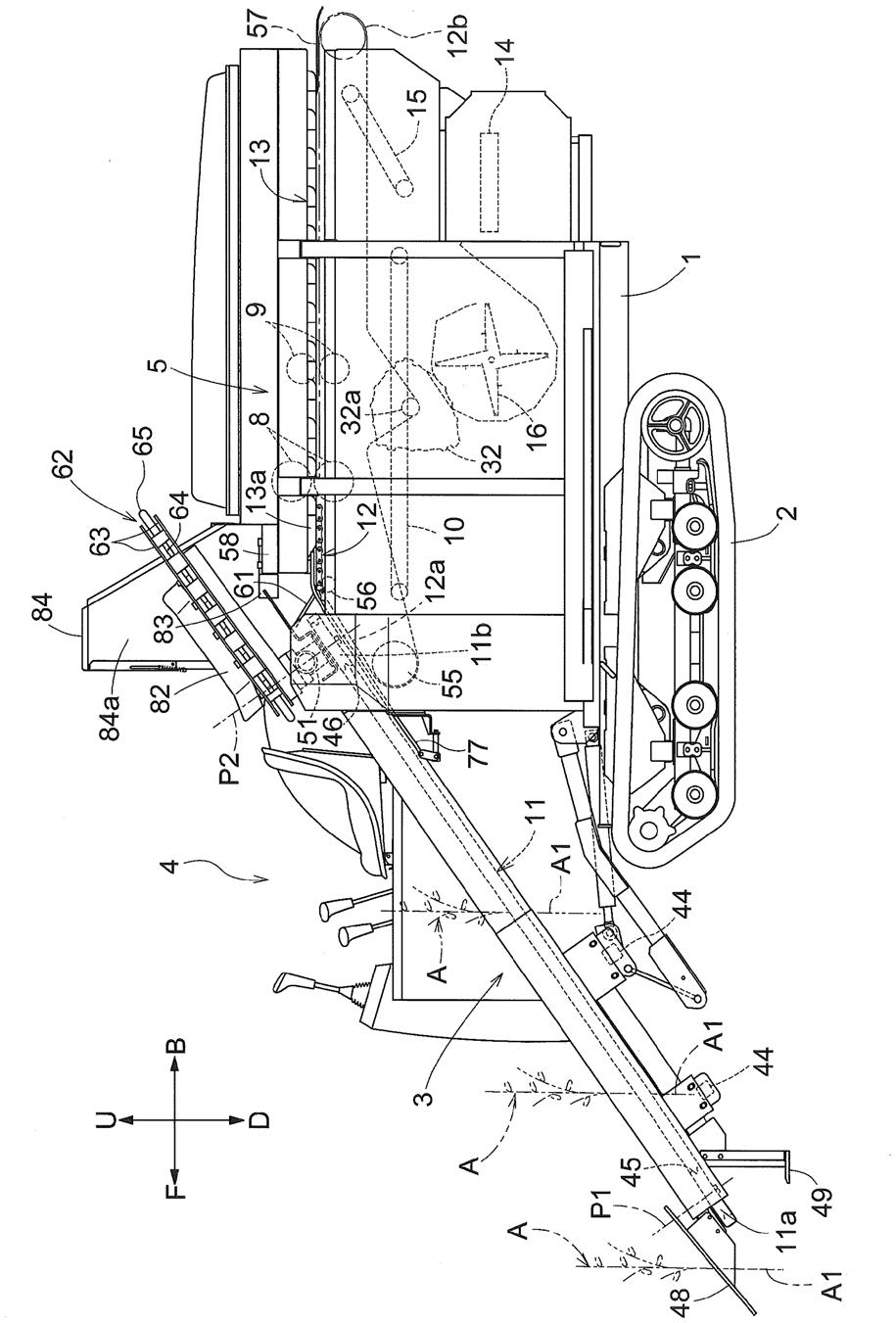
图1是表示第1实施方式的图(以下至图14相同。),是毛豆收割机的左视图。
[0137]
图2是毛豆收割机的俯视图。
[0138]
图3是表示从发动机向各部分的传动系统的概略图。
[0139]
图4是收割部的俯视图。
[0140]
图5是收割部的后部及分离部的附近的俯视图。
[0141]
图6是从图5的vi-vi方向观察的剖视图。
[0142]
图7是从图5的vii-vii方向观察的剖视图。
[0143]
图8是第1搬运体的搬运终端部及第2搬运体的搬运始端部、姿势改变部、防尘罩的附近的左视图。
[0144]
图9是第1搬运体的搬运终端部及第2搬运体的搬运始端部、姿势改变部的附近的俯视图。
[0145]
图10是表示第1搬运体及姿势改变部的传动系统的纵剖后视图。
[0146]
图11是第1搬运体的搬运终端部及第2搬运体的搬运始端部、防尘罩的附近的立体图。
[0147]
图12是第1搬运体的搬运终端部及引导轨道的搬运始端部的附近的俯视图。
[0148]
图13是第2搬运体的搬运始端部及引导轨道的搬运始端部的附近的纵剖后视图。
[0149]
图14是第2搬运体及引导轨道的附近的纵剖后视图。
[0150]
图15是表示第2实施方式的图(以下至图27相同。),是毛豆收割机的左视图。
[0151]
图16是毛豆收割机的俯视图。
[0152]
图17是收割部的后部及分离部的附近的横截俯视图。
[0153]
图18是收割部的俯视图。
[0154]
图19是被下降操作的状态的收割部的附近的左视图。
[0155]
图20是被上升操作的状态的收割部的附近的左视图。
[0156]
图21是从斜后侧观察收割部的附近的立体图。
[0157]
图22是第1搬运体的搬运终端部及第2搬运体的搬运始端部、姿势改变部、防尘罩的附近的左视图。
[0158]
图23是第1搬运体的搬运终端部及第2搬运体的搬运始端部、姿势改变部的附近的俯视图。
[0159]
图24是表示第1搬运体及姿势改变部的传动系统的纵剖后视图。
[0160]
图25是表示从发动机向各部分的传动系统的概略图。
[0161]
图26是表示收割作业的方式的俯视图。
[0162]
图27是表示收割作业的方式的俯视图。
[0163]
图28是表示第3实施方式的图(以下至图41相同。),是毛豆收割机的左视图。
[0164]
图29是毛豆收割机的俯视图。
[0165]
图30是收割部的后部、分离部的第1下旋转体及第2下旋转体的附近的横截俯视图。
[0166]
图31是第2搬运体及引导轨道的左视图。
[0167]
图32是收割部的后部、第2搬运体及引导轨道的前部、姿势改变部的附近的左视
图。
[0168]
图33是第2搬运体及引导轨道的搬运始端部、分离部的第1上旋转体及第1下旋转体的附近的纵剖后视图。
[0169]
图34是第1上旋转体(第2上旋转体)及第1下旋转体(第2下旋转体)的剖视图。
[0170]
图35是第2搬运体及引导轨道的搬运始端部的附近的立体图。
[0171]
图36是第2搬运体的分解立体图。
[0172]
图37是引导轨道的分解立体图。
[0173]
图38是第2搬运体及引导轨道的纵断左视图。
[0174]
图39是第2搬运体及引导轨道的纵剖后视图。
[0175]
图40是表示作物的夹持状态的第2搬运体的俯视图。
[0176]
图41是在图40中从xli-xli方向观察的剖视图。
具体实施方式
[0177]
[第1实施方式]以下,基于附图说明作为本发明的一例的实施方式(第1实施方式)。
[0178]
图1~图14表示作为作物收割机的一例的毛豆收割机。
[0179]
在图1~图14中,f表示机体1的“前方向”,b表示机体1的“后方向”,u表示机体1的“上方向”,d表示机体1的“下方向”。r表示机体1的“右方向”,l表示机体1的“左方向”。
[0180]
(第1实施方式的毛豆收割机的整体结构)如图1及图2所示,借助左右履带型式的行进装置2支承机体1,在机体1的前部的左部设置有收割部3,在机体1的前部的右部设置有驾驶部4。在机体1的后部设置有分离部5,在机体1的右部设置有支承台6及作业甲板(deck)7。
[0181]
(第1实施方式的毛豆收割机的收割的流程的概要)如图1及图2所示,在收割部3具备被绕沿斜向的上下方向的轴心p1、p2旋转驱动的左右第1搬运体11。
[0182]
随着机体1的前进,在收割部3处借助左右第1搬运体11从左侧及右侧夹持田地的起立姿势的作物a,作物a被左右第1搬运体11拔出而被抬起,作物a维持成起立姿势的同时被沿收割部3向斜上侧的后侧搬运。
[0183]
在分离部5的左侧,被绕左右方向的轴心旋转驱动的第2搬运体12被从第1搬运体11的搬运终端部11b向后侧伸出,引导轨道13被沿第2搬运体12配置。
[0184]
若作物a到达第1搬运体11的搬运终端部11b,则在从第1搬运体11的搬运终端部11b向第2搬运体12的搬运始端部12a的交接部分,起立姿势的作物a的姿势被改变成分离部5侧的横倒姿势,被向第2搬运体12的搬运始端部12a交接。
[0185]
横倒姿势的作物a的株干a1(参照图5及图8)被夹持(保持)于第2搬运体12和引导轨道13之间,作物a被第2搬运体12向后侧搬运。
[0186]
如图1、5、6、7所示,在分离部5具备被绕左右方向的轴心旋转驱动的上下两组旋转体8及上下两组旋转体9、在旋转体8、9的下侧被沿前后方向配置的回收传送机10、在回收传送机10的后部的下侧被沿左右方向配置的搬运传送机14、从回收传送机10的后部向后侧隔开既定间隔地配置的排出传送机15、配置于回收传送机10的下侧的扇车16。
[0187]
若横倒姿势的作物a被第2搬运体12向后侧搬运,则作物a先穿过上侧及下侧的旋转体8之间,通过旋转体8的旋转,果实a2被从作物a分离,被分离的果实a2下落至回收传送机10。
[0188]
作物a然后穿过上侧及下侧的旋转体9之间,通过旋转体9的旋转,果实a2被从作物a分离,被分离的果实a2下落至回收传送机10。分离了果实a2的作物a被从第2搬运体12的搬运终端部12b向田地放出。借助旋转体8、9从作物a分离果实a2时,叶等碎渣也一起下落至回收传送机10。
[0189]
回收传送机10被向后侧旋转驱动,下落至回收传送机10的果实a2及碎渣被回收传送机10向后侧搬运,从回收传送机10的后部下落至搬运传送机14。
[0190]
扇车16的搬运风从回收传送机10的下侧流向后侧,穿过回收传送机10和排出传送机15之间,在排出传送机15的上侧流向后侧。
[0191]
果实a2及碎渣从回收传送机10的后部下落时,果实a2抵抗扇车16的搬运风地下落至搬运传送机14。碎渣由于扇车16的搬运风飞起而搭载于排出传送机15,搭载于排出传送机15的碎渣被排出传送机15向后侧搬运而被向田地放出。
[0192]
如图2及图5所示,搬运传送机14被向支承台6侧旋转驱动,多个回收箱17搭载于支承台6。下落至搬运传送机14的果实a2被搬运传送机14向支承台6侧搬运,被向位于搬运传送机14的搬运终端部的回收箱17投入。作业甲板7的辅助作业者在位于搬运传送机14的搬运终端部的回收箱17装满时更换成空的回收箱17。
[0193]
(第1实施方式的从发动机向各部分的传动系统的结构)如图3所示,在驾驶部4的下部支承有发动机18。在机体1的前部的左右中央支承有变速箱19,静油压式的无级变速装置20与变速箱19连结。
[0194]
发动机18的动力被经由传动带21向无级变速装置20的输入轴传递,无级变速装置20的动力被经由变速箱19的内部的副变速装置(无图示)等向行进装置2传递。无级变速装置20的动力被经由齿轮传动机构22、传动带23、传动轴24及传动带25向传动轴26传递,被从传动轴26向收割部3及姿势改变部62(参照后述的(第1实施方式的姿势改变部的结构))传递。
[0195]
发动机18的动力被经由传动带27、传动轴28、传动带29、传动轴30及传动带31向驱动机构32传递,第2搬运体12被驱动机构32旋转驱动。
[0196]
传动轴28的动力被经由传动带34、齿轮型式的传动机构35及传动带36向回收传送机10及排出传送机15传递,回收传送机10及排出传送机15被旋转驱动。
[0197]
回收传送机10的动力被经由传动带37、圆锥齿轮型式的传动机构38及传动链39向搬运传送机14传递,搬运传送机14被旋转驱动。
[0198]
传动轴28的动力被经由传动带33向扇车16传递,扇车16被旋转驱动。传动轴28的动力被经由传动带34、传动轴40及传动带41、42向旋转体8、9传递,旋转体8、9被旋转驱动。
[0199]
(第1实施方式的收割部(第1搬运体)的结构)如图1、2、4所示,在收割部3处设置有左右直线状的支承框43,支承框44被跨左右支承框43的下侧地连结。
[0200]
在左右支承框43的前部,绕沿斜向的上下方向的轴心p1,左右从动轮45被旋转自如地支承。在左右支承框43的后部,绕沿斜向的上下方向的轴心p2,左右驱动轮46被旋转自
如地支承。该情况下,轴心p1和轴心p2互相平行。
[0201]
遍及右从动轮45及右驱动轮46地安装有橡胶带制的右第1搬运体11。遍及左从动轮45及左驱动轮46地安装有橡胶带制的左第1搬运体11。
[0202]
左右第1搬运体11遍及支承框43的全长地配合。多个辊47被旋转自如地支承于支承框43,借助辊47,第1搬运体11的配合部分(作物a的夹持部分)的相反侧被支承。
[0203]
在左右支承框43的前部安装有左右分割器48、心土铲49。
[0204]
左右支承框43在左右方向上维持等间隔,以支承框43的前部在下侧、支承框43的后部在上侧的方式,以侧视观察时倾斜的姿势,将支承框43在机体1的前部的左部沿前后方向支承。
[0205]
在第1搬运体11,从动轮45的附近是搬运始端部11a,驱动轮46的附近是搬运终端部11b。由此,左右第1搬运体11从第1搬运体11的搬运始端部11a遍及至搬运终端部11b,在不扭转的情况下直线地向斜上侧的后侧伸出。
[0206]
(第1实施方式的收割部的驱动系统的结构)如图5、8、9所示,在右第1搬运体11的搬运终端部11b的上侧支承有驱动箱50,在左第1搬运体11的搬运终端部11b的上侧支承有驱动箱51,在驱动箱51的上侧支承有姿势改变部62(参照后述的(第1实施方式的姿势改变部的结构))。
[0207]
驱动轴52被沿轴心p2地支承于驱动箱50、51,在驱动轴52的下部连结有驱动轮46。传动轴53被横向地支承于驱动箱50、51,驱动轴52的圆锥齿轮52a和传动轴53的圆锥齿轮53a咬合。
[0208]
传动轴26(参照图3)被沿左右方向地配置于第1搬运体11的搬运终端部11b的下侧,遍及传动轴26的滑轮26a、传动轴53的滑轮53b地安装有传动带54。
[0209]
根据以上结构,传动轴26的动力被经由传动带54及传动轴53向驱动轴52传递,右驱动轴52(右驱动轮46)被旋转驱动,右第1搬运体11被沿图4及图5的逆时针方向旋转驱动。左驱动轴52(左驱动轮46)被旋转驱动,左第1搬运体11被沿图4及图5的顺时针方向旋转驱动。
[0210]
(第1实施方式的第2搬运体的结构)如图1、2、3、8所示,在机体1的左部支承有驱动机构32,在驱动机构32具备被绕左右方向的轴心旋转驱动的驱动链轮齿32a。在机体1的左部的前部,旋转轮55、56被绕左右方向的轴心旋转自如地支承,在机体1的左部的后部,旋转轮57被绕左右方向的轴心旋转自如地支承。
[0211]
遍及驱动机构32的驱动链轮齿32a及旋转轮55、56、57地安装有第2搬运体12。第2搬运体12是金属制的链,向外侧具备侧视观察时为三角形的凸部。借助驱动机构32的驱动链轮齿32a,第2搬运体12被沿图1及图8的顺时针方向旋转驱动。
[0212]
第2搬运体12从第1搬运体11的搬运终端部11b向后侧伸出,在机体1的左部被沿前后方向配置,在第2搬运体12的右侧配置有分离部5。在第2搬运体12,旋转轮55和旋转轮56之间的部分是搬运始端部12a,旋转轮57的附近是搬运终端部12b。
[0213]
如图1及图8所示,第2搬运体12的搬运始端部12a的前部分(旋转轮55的部分)被配置于、比第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)靠下侧的位置,第2搬运体12的搬运始端部12a被配置成沿第1搬运体11的搬运终端部11b斜向上的倾斜姿势。
[0214]
从第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)遍及搬运终端部12b的部分被配置成侧视观察时为大致水平姿势。
[0215]
(第1实施方式的引导轨道的结构)如图1、8、11、14所示,在机体1的左部的上部沿前后方向支承有支承框58,多个支承杆59被上下移动自如地支承于支承框58。
[0216]
引导轨道13为,短的通道状部件,使开放侧向下地沿前后方向配置成一列,相邻的前后的通道状部件以在上下方向上弯曲的方式借助销互相连接。
[0217]
引导轨道13沿第2搬运体12的上侧向后侧伸出。在支承杆59的下部,将引导轨道13的通道状部件连接的前述的销被支承,引导轨道13(通道状部件)被上下移动自如地支承。具备将支承杆59向下侧施力的弹簧60,引导轨道13被向第2搬运体12推压。
[0218]
在引导轨道13中,第2搬运体12的搬运始端部12a侧的先头的通道状部件为搬运始端部13a。引导轨道13的搬运始端部13a与第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)相比位于稍靠后侧的位置。
[0219]
根据以上结构,若如后所述(第1实施方式的从第1搬运体的搬运终端部向第2搬运部的搬运始端部交接的交接部分的作物的状态)地,作物a的株干a1被夹持于第2搬运体12和引导轨道13之间,则借助作物a的株干a1,引导轨道13折弯,被向上侧抬起,借助弹簧60的作用力,作物a的株干a1被充分的夹持力夹持于第2搬运体12和引导轨道13之间。
[0220]
(第1实施方式的导引部件的结构)如图8、11、12、14所示,具备由圆棒材构成的导引部件61。在引导轨道13的搬运始端部13a的靠近分离部5侧的侧面13a1安装有导引部件61,导引部件61被沿第2搬运体12向前伸出。
[0221]
导引部件61从第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)在侧视观察时向斜向上的前向伸出(参照图8)。
[0222]
导引部件61从第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)在俯视观察时朝向左第1搬运体11斜向左地向前伸出(参照图12)。
[0223]
导引部件61被安装于引导轨道13的搬运始端部13a,由此,导引部件61与引导轨道13的搬运始端部13a一体地上下移动。
[0224]
(第1实施方式的第1搬运体、第2搬运体及引导轨道的位置关系)如图5、8、9所示,第1搬运体11的搬运终端部11b和第2搬运体12的搬运始端部12a被俯视观察时重叠地配置,第2搬运体12的搬运始端部12a在侧视观察时配置于第1搬运体11的搬运终端部11b的下侧的位置。
[0225]
相对于从左右第1搬运体11的互相相向地接触的部分向第1搬运体11的搬运方向伸出的假想线b1,以俯视观察时第2搬运体12的搬运始端部12a的左右中央部12c位移至距分离部5较近的一侧(右侧)的位置的方式配置有第2搬运体12。
[0226]
如图12及图14所示,引导轨道13的距分离部5较近的一侧(右侧)的侧面13a1被配置于俯视观察时第2搬运体12的距分离部5较近的一侧(右侧)的侧面12a1、较远的一侧(左侧)的侧面12a2之间。
[0227]
引导轨道13的距分离部5较远的一侧(左侧)的侧面13a2相对于俯视观察时第2搬运体12的距分离部5较远的一侧(左侧)的侧面12a2,配置于距分离部5较远的一侧(左侧)。
[0228]
如图5及图8所示,第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)在侧视观察时配置于第1搬运体11的搬运终端部11b的后侧的位置。导引部件61及引导轨道13的搬运始端部13a在侧视观察时配置于第1搬运体11的搬运终端部11b的后侧的位置。
[0229]
第1搬运体11的搬运终端部11b呈侧视观察时进入导引部件61的前端部和第2搬运体12的搬运始端部12a之间的状态,导引部件61的前端部在侧视观察时配置于第1搬运体11的搬运终端部11b的上侧的位置。
[0230]
(第1实施方式的姿势改变部的结构)如图1及图2所示,在第1搬运体11的搬运终端部11b(驱动箱51)的上部安装有姿势改变部62。
[0231]
如图8、9,10所示,在姿势改变部62具备引导部63、环状转动体64及爪体65。
[0232]
引导部63具备上侧及下侧的两组,被从第1搬运体11的搬运终端部11b(驱动箱51)朝向第2搬运体12的搬运始端部12a地配置成俯视观察时斜向距分离部5较近的一侧(右侧)地倾斜。在引导部63处,距分离部5较近的一侧(右侧)的边部为导引部63a。
[0233]
在驱动箱51中,驱动轴52被向上侧伸出,传动轴66被旋转自如地支承于引导部63的轴心p2的位置,驱动轴52和传动轴66被经由连结部件67连结。
[0234]
在上下引导部63之间,驱动链轮齿68被旋转自如地支承,遍及传动轴66的链轮齿66a和驱动链轮齿68地安装有传动链69。
[0235]
在上下引导部63之间,从动链轮齿70被旋转自如地支承,从动链轮齿71被相对旋转自如地外嵌于传动轴66。在上下引导部63之间,链状的环状转动体64被遍及驱动链轮齿68及从动链轮齿70、71地安装。
[0236]
由此,驱动轴52的动力被经由传动轴66及传动链69向驱动链轮齿68传递,驱动链轮齿68被旋转驱动,环状转动体64被沿图9的顺时针方向旋转驱动。
[0237]
爪体65被沿环状转动体64的移动方向隔开既定间隔地安装于环状转动体64。爪体65以姿势能够自由地改变成从环状转动体64向外侧突出的作用姿势、及以沿着环状转动体64的方式倒下的非作用姿势的方式安装于环状转动体64。
[0238]
爪体65被与环状转动体64一体地沿图9的顺时针方向旋转驱动的情况下,若爪体65到达驱动链轮齿68,则爪体65被操作成非作用姿势,从驱动链轮齿68从稍过动链轮齿70稍附近的位置操作成作用姿势。
[0239]
爪体65若被稍过动链轮齿70地操作成作用姿势,则在维持作用姿势的同时从从动链轮齿71向驱动链轮齿68移动,若到达驱动链轮齿68则被操作成非作用姿势。
[0240]
(第1实施方式的姿势改变部和第1搬运体及第2搬运体的位置关系)如图1及图8所示,姿势改变部62被侧视观察时遍及第1搬运体11的搬运终端部11b(驱动箱51)的上侧的位置、从第1搬运体11的搬运终端部11b(驱动箱51)向后侧远离的位置地配置。
[0241]
如图1及图8所示,姿势改变部62从第1搬运体11的搬运终端部11b(驱动箱51)的上侧的位置在侧视观察时斜向上地配置,如图2及图9所示,俯视观察时与第2搬运体12的搬运始端部12a重叠。
[0242]
如图2及图9所示,在姿势改变部62中,引导部63的导引部63a从第1搬运体11的搬运终端部11b(驱动箱51)向第2搬运体12的搬运始端部12a在俯视观察时被倾斜地配置成向
距分离部5较近的一侧(右侧)倾斜。
[0243]
环状转动体64被绕沿上下方向的轴心旋转驱动,沿引导部63的导引部63a,呈从第1搬运体11的搬运终端部11b(驱动箱51)侧向第2搬运体12的搬运始端部12a侧移动至驱动链轮齿68的位置的状态。
[0244]
(第1实施方式的向姿势改变部及第1搬运体的传动系统的位置关系)如图10所示,以在左第1搬运体11的搬运终端部11b和姿势改变部62之间的位置呈配置有分配传动部72的状态,在分配传动部72具备驱动箱51、驱动轴52的圆锥齿轮52a及传动轴53的圆锥齿轮53a。
[0245]
具备相对于由第1搬运体11夹持作物a的部分从左外侧的位置向分配传动部72传递动力的传动部73,在传动部73具备传动轴53、传动轴53的滑轮53b及传动带54。
[0246]
将被向分配传动部72传递的动力向位于分配传动部72的下侧的左第1搬运体11传递的下侧传动轴是驱动轴52。将被向分配传动部72传递的动力向位于分配传动部72的上侧的姿势改变部62传递的上侧传动轴是传动轴66。
[0247]
在右第1搬运体11的搬运终端部11b的上侧的位置呈配置有传动部74的状态,在传动部74具备驱动箱50、驱动轴52的圆锥齿轮52a及传动轴53的圆锥齿轮53a。
[0248]
具备相对于由第1搬运体11夹持作物a的部分从右外侧的位置向传动部74传递动力的传动部75,在传动部75具备传动轴53、传动轴53的滑轮53b及传动带54。
[0249]
将被向传动部74传递的动力向位于传动部74的下侧的右第1搬运体11传递的下侧传动轴为驱动轴52。
[0250]
(第1实施方式的株干支承部的结构)如图8、11、13所示,相对于第2搬运体12的搬运始端部12a,在俯视观察时距分离部5较远的一侧(左侧)的位置,配置有从下侧接住作物a的株干a1来向后侧导引的平板状的株干支承部76。株干支承部76从第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)沿第2搬运体12的搬运始端部12a斜向下地向前侧伸出。
[0251]
(第1实施方式的株干引导部的结构)如图8、11、12、13所示,在第2搬运体12的搬运始端部12a,沿第2搬运体12的距分离部5较远的一侧(左侧)的侧面12a2配置有株干引导部77,株干引导部77防止作物a的株干a1从第2搬运体12的搬运始端部12a离开。
[0252]
株干引导部77形成为圆棒状。株干引导部77的后端部配置于引导轨道13的搬运始端部13a的附近,株干引导部77沿第2搬运体12的搬运始端部12a向前侧伸出。从第2搬运体12的搬运始端部12a的前部分(旋转轮55的部分)在前侧,株干引导部77向从第2搬运体12的搬运始端部12a离开的一侧(左侧)伸出。
[0253]
在株干引导部77的前端部,连结有朝向左右方向的支承轴77a。在安装于机体1的支承部78,株干引导部77的支承轴77a被沿左右方向滑动自如地支承,将株干引导部77的前端部向第2搬运体12的搬运始端部12a侧(右侧)施力的弹簧79被安装于株干引导部77的支承轴77a。
[0254]
在株干引导部77的后端部,连结有朝向上下方向的支承轴77b。在支承框58的前部,株干引导部77的支承轴77b被沿上下方向滑动自如地支承,将株干引导部77的后端部向第2搬运体12的搬运始端部12a侧(下侧)施力的弹簧80被安装于株干引导部77的支承轴
77b。
[0255]
(第1实施方式的茎部引导部的结构)如图4、8、11、12、13所示,侧视观察时在第1搬运体11的搬运终端部11b和姿势改变部62之间的位置,具备将作物a的茎部向第2搬运体12的搬运始端部12a侧(右侧)导引的茎部引导部81。
[0256]
茎部引导部81形成为圆棒状,茎部引导部81被沿左第1搬运体11的搬运终端部11b的上部配置,安装于收割部3。
[0257]
茎部引导部81的前部81a位于比第2搬运体12的搬运始端部12a的前部分(旋转轮55的部分)靠前侧的位置,俯视观察时向从左第1搬运体11的搬运终端部11b离开的一侧(左侧)伸出。
[0258]
茎部引导部81的后部81b位于第2搬运体12的搬运始端部12a的后部分(旋转轮56的部分)的上侧附近,俯视观察时向第2搬运体12的搬运始端部12a侧(右侧)伸出。
[0259]
(第1实施方式的上部引导部的结构)如图1、2、8、9所示,侧视观察时在姿势改变部62的上侧的位置具备将作物a的上部向第2搬运体12的搬运始端部12a侧导引的上部引导部82。
[0260]
上部引导部82构成为平板状,在姿势改变部62沿上引导部63的导引部63a安装于上引导部63。上部引导部82被以倾斜姿势设定成,越从安装于上引导部63的部分靠上侧的部分越在俯视观察时朝向右第1搬运体11的搬运终端部11b侧(右侧)。
[0261]
(第1实施方式的后部引导部及防尘罩的结构)如图1、8、11所示,在支承框58的前端部连结有后部引导部83。后部引导部83形成为平板状,以俯视观察时朝向左第1搬运体11的搬运终端部11b侧(左侧)的方式被设定成倾斜姿势。
[0262]
如图1、2、8、11所示,防尘罩84以位于姿势改变部62的右侧的方式安装于机体1。防尘罩84由板材形成为箱状,在防尘罩84的左部(姿势改变部62侧的部分),开口部84a开口。
[0263]
(第1实施方式的从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分的作物的状态)在从第1搬运体11的搬运终端部11b向第2搬运体12的搬运始端部12a的交接部分,起立姿势的作物a的姿势改变成横倒姿势,姿势从第1搬运体11的搬运终端部11b改变成横倒姿势的作物a的株干a1被夹持于第2搬运体12和引导轨道13之间。
[0264]
关于前述的状态下的作物a的流向如以下说明。
[0265]
如图1、2、4所示,在收割部3中,分割器(
デバイダ
)48接触田地,若在心土铲(
サブソイラ
)49进入田地的状态下使机体1前进,则田地的作物a被分割器48分开,由心土铲49挖开田地,同时田地的起立姿势的作物a进入左右第1搬运体11的搬运始端部11a。
[0266]
借助左右第1搬运体11,田地的起立姿势的作物a被从左侧及右侧夹持,作物a被左右第1搬运体11拔出而被抬起,作物a被维持成起立姿势的同时被沿收割部3向斜上侧的后侧搬运。
[0267]
如图8、9、11、12所示,若起立姿势的作物a到达第1搬运体11的搬运终端部11b,则作物a的株干a1被株干支承部76从下侧接住,同时作物a的株干a1的左部与株干引导部77接触,作物a的株干a1被向第2搬运体12的搬运始端部12a导引。
[0268]
接着,借助左右第1搬运体11夹持作物a的状态下,作物a的株干a1被夹持于第2搬运体12的搬运始端部12a和株干引导部77之间,呈与第2搬运体12的搬运始端部12a接触的状态,呈作物a的株干a1被株干支承部76从下侧接住的状态。
[0269]
作物a被左右第1搬运体11夹持的状态下,作物a的茎部与茎部引导部81接触,被向第2搬运体12的搬运始端部12a侧(右侧)导引。
[0270]
通过姿势改变部62的爪体65(环状转动体64)的旋转,作物a的上部进入爪体65之间,上部引导部82与作物a的上部接触。
[0271]
由此,作物a被左右第1搬运体11向后侧(第2搬运体12侧)搬运,呈作物a的株干a1被第2搬运体12的搬运始端部12a搬运的状态,作物a的株干a1稍微呈横倒姿势。
[0272]
姿势改变部62的爪体65(环状转动体64)被旋转驱动,由此,作物a的上部由于爪体65沿引导部63的导引部63a从第1搬运体11的搬运终端部11b向第2搬运体12的搬运始端部12a呈被推动操作的状态。
[0273]
引导部63的导引部63a及爪体65将来自第1搬运体11的搬运终端部11b的作物a的姿势改变成,作物a的带有果实a2的部分呈相对于作物a的株干a1距分离部5较近的一侧(右侧)的横倒姿势。上部引导部82辅助前述的作物a向横倒姿势的姿势改变。
[0274]
接着,如图8、9、13所示,若作物从第1搬运体11的搬运终端部11b向后侧离开,则作物a的姿势被姿势改变部62改变成横倒姿势。
[0275]
从第1搬运体11的搬运终端部11b姿势改变成横倒姿势的作物a的株干a1被夹持于第2搬运体12的搬运始端部12a和株干引导部77之间,呈搭载于第2搬运体12的搬运始端部12a的状态。
[0276]
与此同时,作物a的上部以倒入的方式进入防尘罩84的开口部84a,作物a的上部被后部引导部83向防尘罩84的开口部84a导引。
[0277]
接着,横倒姿势的作物a的株干a1借助导引部件61被向第2搬运体12和引导轨道13的搬运始端部13a之间导引,被夹持于第2搬运体12和引导轨道13之间,借助第2搬运体12和引导轨道13,作物a被以横倒姿势向后侧搬运。
[0278]
(第1实施方式的其他方式)在姿势改变部62中,也可以废除环状转动体64及爪体65,由引导部63构成姿势改变部62。
[0279]
也可以将姿势改变部62侧视观察时配置于第1搬运体11的搬运终端部11b和第2搬运体12的搬运始端部12a之间。
[0280]
也可以在机体1的前部的右部设置收割部3(第1搬运体11)、第2搬运体12及引导轨道13。根据该结构,分离部5被设置于第2搬运体12及引导轨道13的左侧。
[0281]
[第2实施方式]以下,基于附图说明作为本发明的一例的实施方式(第2实施方式)。
[0282]
图15~图27表示作为作物收割机的一例的毛豆收割机。
[0283]
在图15~图27中,f表示机体1的“前方向”,b表示机体1的“后方向”,u表示机体1的“上方向”,d表示机体1的“下方向”。r表示机体1的“右方向”,l表示机体1的“左方向”。
[0284]
(第2实施方式的毛豆收割机的整体结构)如图15及图16所示,借助左右履带型式的行进装置102支承机体101,在机体101的前部
的左部设置有收割部103,在机体101的前部的右部设置有驾驶部104。在机体101的后部设置有分离部105,在机体101的右部设置有支承台106及作业甲板(deck)107。
[0285]
(第2实施方式的毛豆收割机的收割的流程的概要)如图15及图16所示,在收割部103具备被绕沿斜向的上下方向的轴心p
´
1、p
´
2旋转驱动的左右第1搬运体111。
[0286]
随着机体101的前进,在收割部103处借助左右第1搬运体111从左侧及右侧夹持田地的起立姿势的作物a,作物a被左右第1搬运体111拔出而被抬起,作物a维持成起立姿势的同时被沿收割部103向斜上侧的后侧搬运。
[0287]
在分离部105的左侧,被绕左右方向的轴心旋转驱动的第2搬运体112被从第1搬运体111的搬运终端部11b向后侧伸出,引导轨道113被沿第2搬运体112配置。
[0288]
若作物a到达第1搬运体111的搬运终端部111b,则在从第1搬运体111的搬运终端部111b向第2搬运体112的搬运始端部112a的交接部分,起立姿势的作物a的姿势被改变成分离部105侧的横倒姿势,被向第2搬运体112的搬运始端部112a交接。横倒姿势的作物a的株干a1被夹持(保持)于第2搬运体112和引导轨道113之间,作物a被第2搬运体112向后侧搬运。
[0289]
如图15、16、17所示,在分离部105具备被绕左右方向的轴心旋转驱动的上下两组旋转体108及上下两组旋转体109、在旋转体108、109的下侧被沿前后方向配置的回收传送机110、在回收传送机110的后部的下侧被沿左右方向配置的搬运传送机114、从回收传送机110的后部向后侧隔开既定间隔地配置的排出传送机115、配置于回收传送机110的下侧的扇车116。
[0290]
若横倒姿势的作物a被第2搬运体112向后侧搬运,则作物a先穿过上侧及下侧的旋转体108之间,通过旋转体108的旋转,果实a2被从作物a分离,被分离的果实a2下落至回收传送机110。
[0291]
作物a然后穿过上侧及下侧的旋转体109之间,通过旋转体109的旋转,果实a2被从作物a分离,被分离的果实a2下落至回收传送机110。分离了果实a2的作物a被从第2搬运体112的搬运终端部112b向田地放出。借助旋转体108、109从作物a分离果实a2时,叶等碎渣也一起下落至回收传送机110。
[0292]
回收传送机110被向后侧旋转驱动,下落至回收传送机110的果实a2及碎渣被回收传送机110向后侧搬运,从回收传送机110的后部下落至搬运传送机114。
[0293]
扇车116的搬运风从回收传送机110的下侧流向后侧,穿过回收传送机110和排出传送机115之间,在排出传送机115的上侧流向后侧。
[0294]
果实a2及碎渣从回收传送机110的后部下落时,果实a2抵抗扇车116的搬运风地下落至搬运传送机114。碎渣由于扇车116的搬运风飞起而搭载于排出传送机115,搭载于排出传送机115的碎渣被排出传送机115向后侧搬运而被向田地放出。
[0295]
搬运传送机114被向支承台106侧旋转驱动,多个回收箱117搭载于支承台106。下落至搬运传送机114的果实a2被搬运传送机114向支承台106侧搬运,被向位于搬运传送机114的搬运终端部的回收箱117投入。作业甲板107的辅助作业者在位于搬运传送机114的搬运终端部的回收箱117装满时更换成空的回收箱117。
[0296]
(第2实施方式的田地处收割作业的方式)
如图26及图27所示,在田地处,作物a被以呈多列l1~l5的方式插秧。
[0297]
在前述的状态中,使机体101沿作物a的列l1~l5的端部的作物a的列l1前进,借助收割部103将列l1的作物a收割(参照位置k1)。该情况下,机体101的右侧为结束作物a的收割的区域(作物a不存在的区域),在机体101的左侧为存在收割前的作物a的区域。
[0298]
若机体101结束列l1的作物a的收割的到达位置k2,则将收割部103上升操作,进行转弯行进m1,使机体101位于相反侧的作物a的列l2的位置k3。在位置k3将收割部103下降操作,使机体101沿作物a的列l2前进,借助收割部103将列l2的作物a收割。
[0299]
该情况下也与前述相同地,机体101的右侧成结束作物a的收割的区域(作物a不存在的区域),机体101的左侧从收割前的作物a存在的区域。
[0300]
若机体101结束列l2的作物a的收割而到达位置k4,则将收割部103上升操作,进行转弯行进m2,使机体101位于相反侧的作物a的列l3的位置k5。在位置k5将收割部103下降操作,使机体101沿作物a的列l3前进,借助收割部103将列l3的作物a收割。
[0301]
像以上那样地进行列l3的作物a的收割,借助进行转弯行进m1,进行列l4的作物a的收割,借助进行转弯行进m2,进行列l5的作物a的收割,这样重复转弯行进m1、m2、l1~l5的作物a的收割,由此,将田地的作物a收割。
[0302]
(第2实施方式的收割部的结构)如图18、19、21所示,在收割部103处设置有左右直线状的支承框143。在左右支承框143处左右框128、129被向下地连结,支承框130、144被遍及左右框128、129的下部地地沿左右方向连结。
[0303]
在左右支承框143的后部的下部,左右支承框131被向下地连结,支承框133被遍及左右支承框131的下部地沿左右方向地连结。左右支承框134被遍及支承框130的右部及左部和支承框133的右部及左部地沿支承框143地连结。如上所述地构成收割部103的骨架。
[0304]
在左右支承框143的前部,绕沿斜向的上下方向的轴心p
´
1,左右从动轮145被旋转自如地支承。在左右支承框143的后部,绕沿斜向的上下方向的轴心p
´
2,左右驱动轮146被旋转自如地支承。该情况下,轴心p
´
1和轴心p
´
2互相平行。
[0305]
遍及右从动轮145及右驱动轮146地安装有橡胶带制的右第1搬运体111。遍及左从动轮145及左驱动轮146地安装有橡胶带制的左第1搬运体111。左右第1搬运体111遍及支承框143的全长地配合。
[0306]
多个辊147被旋转自如地支承于支承框143,借助辊147,第1搬运体111的配合部分(作物a的夹持部分)的相反侧被支承。在左右支承框143的前部安装有左右分割器148、心土铲149。
[0307]
左右支承框143在左右方向上维持等间隔,以支承框143的前部在下侧、支承框143的后部在上侧的方式,以侧视观察时倾斜的姿势,将支承框143在机体101的前部的左部沿前后方向支承。
[0308]
在第1搬运体111,从动轮145的附近是搬运始端部111a,驱动轮146的附近是搬运终端部111b。由此,左右第1搬运体111从第1搬运体111的搬运始端部111a遍及至搬运终端部111b,在不扭转的情况下直线地向斜上侧的后侧伸出。
[0309]
(第2实施方式的收割部的升降构造)如图17、21、22、24所示,机体101的前部的左部连结有四根支柱135。遍及支柱135的上
部连结有前后方向的左右支承框136,遍及支柱135的下部连结有左右方向的左右支承框137。
[0310]
左右支承框136在连结有管状的左右摆动支承部138。左右摆动支承部138被沿左右方向的支承轴心p
´
11配置,被互相隔开间隔地配置。
[0311]
如图18及图19所示,在右支承框143的后部,连结有收割部103的右后部即支承板139,在支承板139的上部,铸造物的箱状的右摆动支点部150被连结而向上侧伸出。
[0312]
在左支承框143的后部,连结有收割部103的左后部即支承板140,在支承板140的上部,铸造物的箱状的左摆动支点部151被连结而向上侧伸出。
[0313]
如图18及图19所示,在左右摆动支点部150、151设置有横向的凸边部150a、151a,如图17、21、24所示,左右摆动支点部150、151的凸边部150a、151a被旋转自如地支承于左右摆动支承部138。
[0314]
由此,收割部103(左右摆动支点部150、151)借助左右摆动支承部138,被绕从收割部103的后部(第1搬运体111的搬运终端部111b)向上侧离开的左右方向的支承轴心p
´
11上下摆动自如(升降自如)地支承。
[0315]
在右摆动支点部150及右摆动支承部138和左摆动支点部151与左摆动支承部138之间设置有作物a通过的通路c。
[0316]
如图19及图21所示,在收割部103,在支承框130的左右中央部连结有托架130a,遍及机体101的前部和支承框130的托架130a连接有油压压力缸141(相当于升降机构)。
[0317]
如图20所示,若使油压压力缸141伸长工作,则能够将收割部103上升操作,如图19所示,若使油压压力缸141收缩工作,则能够将收割部103下降操作。
[0318]
(第2实施方式的负荷支承部的结构)如图19、20、21所示,负荷支承部172被遍及机体101的收割部103的后部(摆动支点部150、151)的下侧的部分、收割部103地连接。在负荷支承部172具备第1支承部件173和第2支承部件174。
[0319]
第1支承部件173具备右侧和左侧的两组,被绕机体101的前部的左右方向的轴心p
´
3上下摆动自如地支承,向前侧伸出。遍及左右第1支承部件173的多个部位地连结有沿左右方向的框175。
[0320]
第2支承部件174主视观察时为四边形状的平板状,第2支承部件174的下部被绕第1支承部件173的前部的左右方向的轴心p
´
4摆动自如地支承。第2支承部件174的上部被绕收割部103的左右框129的左右方向的轴心p
´
5摆动自如地连接。
[0321]
如前述(收割部的升降构造)所述,将收割部103升降操作的情况下,在负荷支承部172,第1支承部件173及第2支承部件174绕轴心p
´
3、p
´
4、p
´
5摆动,由此,允许收割部103的升降操作。
[0322]
对收割部103施加左右方向的负荷的情况下,对收割部103沿左右方向施加的负荷被负荷支承部172支承,对收割部103沿左右方向施加的负荷能够避免对收割部103的摆动支点部150、151、摆动支承部138施加的状态。
[0323]
(第2实施方式的向收割部的传动系统的结构)如图16及图25所示,在驾驶部104的下部支承有发动机118。发动机118的动力被从传动带127向第2搬运体112的驱动机构132、分离部105的旋转体108、109、回收传送机110、搬运
传送机114、排出传送机115及扇车116传递。
[0324]
在机体101的前部的左右中央支承有变速箱119,静油压式的无级变速装置120与变速箱119连结。发动机118的动力被经由传动带121向无级变速装置120的输入轴传递,无级变速装置120的动力被经由变速箱119的内部的副变速装置(无图示)等向行进装置102传递。
[0325]
无级变速装置120的动力被经由齿轮传动机构122、传动带123、传动轴124及传动带125向传动轴126传递。
[0326]
如图21、22、24所示,在支柱135的下部,左右支承框142被沿前后方向连结,传动轴126被沿左右方向支承于左右支承框142。
[0327]
如图17、24、25所示,驱动轴152被沿轴心p
´
2支承于摆动支点部150、151,在驱动轴152的下部连结有驱动轮146。在摆动支点部150、151,传动轴153被横向地支承于支承轴心p
´
11的位置,驱动轴152的圆锥齿轮152a和传动轴153的圆锥齿轮153a咬合。遍及传动轴126的滑轮126a和传动轴153的滑轮153b安装有传动带154。
[0328]
根据以上结构,传动轴126的动力被经由传动带154及传动轴153向驱动轴152传递,右驱动轴152(右驱动轮146)被旋转驱动,右第1搬运体111被沿图16及图17的逆时针方向旋转驱动。左驱动轴152(左驱动轮146)被旋转驱动,左第1搬运体111被沿图16及图17的顺时针方向旋转驱动。
[0329]
(第2实施方式的进入防止部件的结构)如图15、16、19、21所示,进入防止部件178被安装于收割部103。进入防止部件178被圆棒状地形成,具备前后朝向部分178a和上下朝向部分178b。
[0330]
进入防止部件178的前后朝向部分178a的前部安装于作为收割部103的前部的左框128,进入防止部件178的前后朝向部分178a被遍及收割部103的前部的左部和作为收割部103侧的左行进装置102的前部附近地沿前后方向配置。
[0331]
进入防止部件178的上下朝向部分178b从进入防止部件178的前后朝向部分178a的后部向上侧伸出,进入防止部件178的上下朝向部分178b的上部被安装于收割部103的后部即支承框133的左部。
[0332]
进入防止部件178(前后朝向部分178a及上下朝向部分178b)位于俯视观察时负荷支承部172(第1支承部件173及第2支承部件174)的外侧(左侧),在侧视观察时呈与负荷支承部172(第1支承部件173及第2支承部件174)交叉的状态。
[0333]
(第2实施方式的接触防止部件的结构)如图15、16、19、21所示,在机体101的左横部的前部及后部(相当于机体101的收割部103侧的行进装置102的上侧的部分)安装有接触防止部件179、180。
[0334]
前接触防止部件179被圆棒状地形成,前接触防止部件179的前部被连结于机体101的左横部的前部。前接触防止部件179的前部位于比进入防止部件178的上下朝向部分178b靠内侧(右侧)的位置,前接触防止部件179被向斜左横侧的后侧伸出。前接触防止部件179的后部位于比俯视观察时进入防止部件178的上下朝向部分178b靠外侧(左侧)的位置。
[0335]
后接触防止部件180形成为俯视观察时为长方形状的框状,与机体101的左横部的后部连结,作业者立起地乘坐于后接触防止部件180。
[0336]
后接触防止部件180比俯视观察时进入防止部件178的上下朝向部分178b向外侧
(左侧)伸出,前接触防止部件179的后部与后接触防止部件180的前部连接。
[0337]
(第2实施方式的进入防止部件及接触防止部件的功能)前述的(田地处的收割作业的方式)如图26及图27所示,使机体1沿作物a的列l1~l5前进而借助收割部103将列l1~l5的作物a收割的情况下,机体101的右侧为结束作物a的收割的区域(作物a不存在的区域),机体101的左侧为收割前的作物a存在的区域。
[0338]
若以作物a的列l1为例,则如图27所示,俯视观察时,左行进装置102位于收割部103的前部的后侧,相对于被收割部103收割的作物a的列l1在左侧,收割前的作物a的列l3相邻地存在,左行进装置102呈在收割前的作物a的列l3的附近沿收割前的作物a的列l3行进的状态。
[0339]
如图15及图19所示,将收割部103下降操作至收割部103的前部接触田地的位置的状态下,以收割部103的前部在侧视观察时位于左行进装置102的前侧而位于田地附近、收割部103的后部在侧视观察时位于左行进装置102的上侧的方式,呈收割部103被沿前后方向支承于机体101的左部的状态。
[0340]
在以上的状态中,即使收割前的作物a(列l3)欲进入左行进装置102的前侧的区域(收割部103的前部和左行进装置102的前部之间的区域),收割前的作物a(列l3)也被进入防止部件178(前后朝向部分178a)阻止,防止收割前的作物a(列l3)向左行进装置102的前侧的区域的进入。
[0341]
接着,若收割前的作物a(列l3)通过左行进装置102的前侧的区域,则到达左行进装置102的横侧。即使收割前的作物a(列l3)欲与左行进装置102接触,收割前的作物a(列l3)也被前后接触防止部件179、180阻止,防止收割前的作物a(列l3)与左行进装置102的接触。
[0342]
(第2实施方式的第2搬运体的结构)如图15、16、17所示,在机体101的左部支承有驱动机构132,在驱动机构132具备被绕左右方向的轴心旋转驱动的驱动链轮齿132a。在机体101的左部的前部,旋转轮155、156被绕左右方向的轴心旋转自如地支承,在机体101的左部的后部,旋转轮157被绕左右方向的轴心旋转自如地支承。
[0343]
遍及驱动机构132的驱动链轮齿132a及旋转轮155、156、157地安装有第2搬运体112。第2搬运体112是金属制的链,向外侧具备侧视观察时为三角形的凸部。借助驱动机构132的驱动链轮齿132a,第2搬运体112被沿图15的顺时针方向旋转驱动。
[0344]
第2搬运体112从第1搬运体111的搬运终端部111b向后侧伸出,在机体101的左部被沿前后方向配置,在第2搬运体112的右侧配置有分离部105。在第2搬运体112,旋转轮155和旋转轮156之间的部分是搬运始端部112a,旋转轮157的附近是搬运终端部112b。
[0345]
如图15及图22所示,第2搬运体112的搬运始端部112a的前部分(旋转轮155的部分)被配置于比、第2搬运体112的搬运始端部112a的后部分(旋转轮156的部分)靠下侧的位置,第2搬运体112的搬运始端部112a被配置成沿第1搬运体111的搬运终端部111b斜向上的倾斜姿势。
[0346]
从第2搬运体112的搬运始端部112a的后部分(旋转轮156的部分)遍及搬运终端部112b的部分被配置成侧视观察时为大致水平姿势。
[0347]
(第2实施方式的引导轨道的结构)
如图15及图22所示,在机体101的左部的上部沿前后方向支承有支承框158,多个支承杆159被上下移动自如地支承于支承框158。
[0348]
引导轨道113为,短的通道状部件被使开放侧向下地沿前后方向配置成一列,相邻的前后的通道状部件以在上下方向上弯曲的方式借助销互相连接。
[0349]
引导轨道113沿第2搬运体112的上侧向后侧伸出。在支承杆159的下部,将引导轨道113的通道状部件连接的前述的销被支承,引导轨道113(通道状部件)被上下移动自如地支承。具备将支承杆159向下侧施力的弹簧160,引导轨道113被向第2搬运体112推压。
[0350]
在引导轨道113中,第2搬运体112的搬运始端部112a侧的先头的通道状部件为搬运始端部113a。引导轨道113的搬运始端部113a与第2搬运体112的搬运始端部112a的后部分(旋转轮156的部分)相比位于稍靠后侧的位置。
[0351]
根据以上结构,若如后所述(从第1搬运体的搬运终端部向第2搬运部的搬运始端部交接的交接部分的作物的状态)地,作物a的株干a1被夹持于第2搬运体112和引导轨道113之间,则借助作物a的株干a1,引导轨道113折弯,被向上侧抬起,借助弹簧160的作用力,作物a的株干a1被充分的夹持力夹持与第2搬运体112和引导轨道113之间。
[0352]
由圆棒材构成的导引部件161被安装于引导轨道113的搬运始端部113a。导引部件161被沿第2搬运体112向前伸出,从第2搬运体112的搬运始端部112a的后部分(旋转轮156的部分)在侧视观察时斜上地向前伸出。导引部件161安装于引导轨道113的搬运始端部113a,由此,导引部件161与引导轨道113的搬运始端部113a一体地上下移动。
[0353]
(第2实施方式的第1搬运体、第2搬运体及引导轨道的位置关系)如图15所示,在将收割部103下降操作至收割部103的前部接触田地的位置的状态下,收割部103被配置成侧视观察时前部(第1搬运体111的搬运始端部111a)较低而后部(第1搬运体111的搬运终端部111b)较高的倾斜的姿势。
[0354]
该状态下如图22及图23所示,第1搬运体111的搬运终端部111b和第2搬运体112的搬运始端部112a被在俯视观察时重叠地配置,第2搬运体112的搬运始端部112a在侧视观察时被配置于第1搬运体111的搬运终端部111b的下侧的位置。
[0355]
相对于从左右第1搬运体111的互相相向地接触的部分向第1搬运体111的搬运方向伸出的假想线b11,以俯视观察时第2搬运体112(搬运始端部112a)的左右中央部112c位移至距分离部105较近的一侧(右侧)的位置的方式配置有第2搬运体112。
[0356]
如图12及图14所示,引导轨道13的距分离部5较近的一侧(右侧)的侧面13a1被配置于俯视观察时第2搬运体12的距分离部5较近的一侧(右侧)的侧面12a1、较远的一侧(左侧)的侧面12a2之间。
[0357]
第2搬运体112的搬运始端部112a的后部分(旋转轮156的部分)在侧视观察时配置于第1搬运体111的搬运终端部111b的后侧的位置。导引部件161及引导轨道113的搬运始端部113a在侧视观察时配置于第1搬运体111的搬运终端部111b的后侧的位置。
[0358]
第1搬运体111的搬运终端部111b呈侧视观察时进入导引部件161的前端部和第2搬运体112的搬运始端部112a之间的状态,导引部件161的前端部在侧视观察时配置于第1搬运体11的搬运终端部111b的上侧的位置。
[0359]
如上所述,在将收割部103下降操作至收割部103的前部接触田地的位置的状态下,第1搬运体111的搬运终端部111b和第2搬运体112的搬运始端部112a的位置关系被适当
地设定。
[0360]
在前述的状态中,若将收割部103上升操作,则绕从收割部103的后部向上侧离开的支承轴心p
´
11,收割部103向上侧摆动,由此,收割部103的后部(第1搬运体的搬运终端部)呈从第2搬运体112的搬运始端部112a向前侧离开的状态。
[0361]
若将收割部103下降操作,则绕从收割部103的后部向上侧离开的支承轴心p
´
11,收割部103向下侧摆动,收割部103的后部(第1搬运体111的搬运终端部111b)向后侧移动而接近第2搬运体112的搬运始端部112a,第1搬运体111的搬运终端部111b和第2搬运体112的搬运始端部112a恢复图22所示的适当的位置关系。
[0362]
(第2实施方式的姿势改变部的结构)如图15及图16所示,在第1搬运体111的搬运终端部111b(摆动支点部151)的上部连结有姿势改变部162。
[0363]
如图22及图23所示,在姿势改变部162具备引导部163、环状转动体164及爪体165。
[0364]
引导部163具备上侧及下侧的两组,从第1搬运体111的搬运终端部111b(摆动支点部151)向第2搬运体112的搬运始端部112a,被俯视观察时斜向分离部105较近的一侧(右侧)地倾斜地配置。在引导部163处,距分离部105较近的一侧(右侧)的边部为导引部163a。
[0365]
如图23、24、25所示,在引导部163的轴心p
´
2的位置旋转自如地支承有传动轴166,在摆动支点部151,驱动轴152被向上侧伸出,驱动轴152和传动轴166被经由连结部件167连结。
[0366]
在上下引导部163之间,驱动链轮齿168被旋转自如地支承,遍及传动轴166的链轮齿166a和驱动链轮齿168地安装有传动链169。
[0367]
在上下引导部163之间,从动链轮齿170被旋转自如地支承,从动链轮齿171被相对旋转自如地外嵌于传动轴166。在上下引导部163之间,链状的环状转动体164被遍及驱动链轮齿168及从动链轮齿170、171地安装。
[0368]
由此,驱动轴152的动力被经由传动轴166及传动链169向驱动链轮齿168传递,驱动链轮齿168被旋转驱动,环状转动体164被沿图23的顺时针方向旋转驱动。
[0369]
爪体165被沿环状转动体164的移动方向隔开既定间隔地安装于环状转动体164。爪体165以姿势能够自由地改变成从环状转动体164向外侧突出的作用姿势、及以沿着环状转动体164的方式倒下的非作用姿势的方式安装于环状转动体164。
[0370]
爪体165被与环状转动体164一体地沿图23的顺时针方向旋转驱动的情况下,若爪体165到达驱动链轮齿168,则爪体165被操作成非作用姿势,从驱动链轮齿168将从动链轮齿170从稍附近位置操作成作用姿势。
[0371]
爪体165若将从动链轮齿170稍微操作成作用姿势,则在维持作用姿势的同时从从动链轮齿171向驱动链轮齿168移动,若到达驱动链轮齿168则被操作成非作用姿势。
[0372]
(第2实施方式的姿势改变部和第1搬运体及第2搬运体、引导轨道的位置关系)如图15所示,在将收割部103下降操作至收割部103的前部接触田地的位置的状态下,如图22及图23所示,姿势改变部162被在侧视观察时遍及第1搬运体111的搬运终端部111b(摆动支点部151)的上侧的位置和从第1搬运体111的搬运终端部111b(摆动支点部151)向后侧离开的位置地配置。
[0373]
该状态下,姿势改变部162被配置成从第1搬运体111的搬运终端部111b(摆动支点
部151)的上侧的位置在侧视观察时斜向上,与俯视观察时第2搬运体112的搬运始端部112a及引导轨道113(支承框158)重叠。
[0374]
在姿势改变部162,引导部163的导引部163a从第1搬运体111的搬运终端部111b(摆动支点部151)向第2搬运体112的搬运始端部112a,在俯视观察时倾斜地在分离部105较近的一侧(右侧)被倾斜地配置。
[0375]
在姿势改变部162处,环状转动体164被绕沿上下方向的轴心旋转驱动,呈沿引导部163的导引部163a从第1搬运体111的搬运终端部111b(摆动支点部151)侧向第2搬运体112的搬运始端部112a侧移动至驱动链轮齿168的位置的状态。
[0376]
如上所述,在将收割部103下降操作至收割部103的前部接触田地的位置的状态下,姿势改变部162和第2搬运体112的搬运始端部112a及引导轨道113(支承框158)的位置关系被适当地设定。
[0377]
在前述的状态下,若将收割部103上升操作,则收割部103绕从收割部103的后部向上侧离开的支承轴心p
´
11向上侧摆动,由此,姿势改变部162向后侧的斜下侧移动,沿支承框158呈位于支承框158的上侧的状态。
[0378]
若将收割部103下降操作,则收割部103绕从收割部103的后部向上侧离开的支承轴心p
´
11向下侧摆动,由此,姿势改变部162向前侧的斜上侧移动,姿势改变部162和第2搬运体112的搬运始端部112a及引导轨道113(支承框158)恢复至图22所示的适当的位置关系。
[0379]
(第2实施方式的株干支承部、株干引导部、茎部引导部、上部引导部、后部引导部及防尘罩的结构)如图17及图22所示,相对于第2搬运体112的搬运始端部112a,在俯视观察时距分离部105较远的一侧(左侧)的位置,配置有将作物a的株干a1从下侧接住来向后侧导引的平板状的株干支承部176。株干支承部176从第2搬运体112的搬运始端部112a的后部分(旋转轮156的部分)沿第2搬运体112的搬运始端部112a向斜向下的前侧伸出。
[0380]
如图15及图22所示,在第2搬运体112的搬运始端部112a,沿第2搬运体112的距分离部105较远的一侧(左侧)的侧面配置有圆棒状的株干引导部177。株干引导部177防止作物a的株干a1从第2搬运体112的搬运始端部112a离开。
[0381]
如图22及图23所示,侧视观察时在第1搬运体111的搬运终端部111b和姿势改变部162之间的位置设置有圆棒状的茎部引导部181。茎部引导部181将作物a的茎部向第2搬运体112的搬运始端部112a侧(右侧)导引。
[0382]
侧视观察时在姿势改变部162的上侧的位置具备将作物a的上部向第2搬运体112的搬运始端部112a侧导引的平板状的上部引导部182。
[0383]
在支承框158的前端部连结有后部引导部183。后部引导部183被平板状地形成,以俯视观察时朝向左第1搬运体111的搬运终端部111b侧(左侧)的方式被设定成倾斜姿势。
[0384]
防尘罩184被以位于姿势改变部162的右侧的方式安装于机体101。防尘罩184由板材形成为箱状,在防尘罩184的左部(姿势改变部162侧的部分),开口部184a开口。
[0385]
(第2实施方式的从第1搬运体的搬运终端部向第2搬运体的搬运始端部的交接部分的作物的状态)在从第1搬运体111的搬运终端部111b向第2搬运体112的搬运始端部112a的交接部分,
起立姿势的作物a的姿势改变成横倒姿势,姿势从第1搬运体111的搬运终端部111b改变成横倒姿势的作物a的株干a1被夹持于第2搬运体112和引导轨道113之间。
[0386]
关于前述的状态下的作物a的流向如以下说明。
[0387]
如图15及图16所示,在收割部103中,若在分割器148接触田地而心土铲149进入田地的状态下使机体101前进,则田地的作物a被分割器148分开,由心土铲149挖开田地的同时,田地的起立姿势的作物a进入左右第1搬运体111的搬运始端部111a。
[0388]
借助左右第1搬运体111,田地的起立姿势的作物a被从左侧及右侧夹持,作物a被左右第1搬运体111拔出而被抬起,作物a被维持成起立姿势的同时被沿收割部103向斜上侧的后侧搬运。
[0389]
如图17、22、23所示,若起立姿势的作物a到达第1搬运体111的搬运终端部111b,则作物a的株干a1被株干支承部176从下侧接住,同时作物a的株干a1进入第2搬运体112的搬运始端部112a和株干引导部177之间,被向第2搬运体112的搬运始端部112a导引。
[0390]
接着,在作物a被左右第1搬运体111夹持的状态下,作物a的株干a1被夹持于第2搬运体112的搬运始端部112a和株干引导部177之间,呈与第2搬运体112的搬运始端部112a接触的状态,作物a的株干a1呈被株干支承部176从下侧接住的状态。
[0391]
作物a被左右第1搬运体111夹持的状态下,作物a的茎部与茎部引导部181接触,被向第2搬运体112的搬运始端部112a侧(右侧)导引。
[0392]
通过姿势改变部162的爪体165(环状转动体164)的旋转,作物a的上部进入爪体165之间,上部引导部182与作物a的上部接触。
[0393]
由此,作物a被左右第1搬运体111向后侧(第2搬运体112侧)搬运,呈作物a的株干a1被第2搬运体112的搬运始端部112a搬运的状态,作物a的株干a1稍微呈横倒姿势。
[0394]
在第1搬运体111的搬运终端部111b处,作物a通过右摆动支点部150及右摆动支承部138和左摆动支点部151与左摆动支承部138之间的通路c(参照图21及图24)。
[0395]
姿势改变部162的爪体165(环状转动体164)被旋转驱动,由此,作物a的上部由于爪体165沿引导部163的导引部163a从第1搬运体111的搬运终端部111b向第2搬运体112的搬运始端部112a呈被推动操作的状态。
[0396]
姿势改变部162的引导部163的导引部163a及爪体165将来自第1搬运体111的搬运终端部111b的作物a的姿势改变成,作物a的带有果实a2的部分呈相对于作物a的株干a1距分离部105较近的一侧(右侧)的横倒姿势。上部引导部182辅助前述的作物a向横倒姿势的姿势改变。
[0397]
接着,从第1搬运体111的搬运终端部111b向后侧离开而借助姿势改变部162姿势改变成横倒姿势的作物a的株干a1被夹持与第2搬运体112的搬运始端部112a和株干引导部177之间,呈搭载于第2搬运体112的搬运始端部112a的状态。
[0398]
与此同时,作物a的上部以倒入的方式进入防尘罩184的开口部184a,作物a的上部被后部引导部183向防尘罩184的开口部184a导引。
[0399]
接着,横倒姿势的作物a的株干a1借助导引部件161被向第2搬运体112和引导轨道113的搬运始端部113a之间导引,被夹持于第2搬运体112和引导轨道113之间,借助第2搬运体112和引导轨道113,作物a被以横倒姿势向后侧搬运。
[0400]
(第2实施方式的其他方式)
也可以在机体101的前部的右部设置有收割部103(第1搬运体111)、第2搬运体112及引导轨道113。
[0401]
根据该结构,在第2搬运体112及引导轨道113的左侧设置分离部105。在机体1的前部的右部设置油压压力缸141及负荷支承部172。
[0402]
进入防止部件178被安装于收割部103的右部,在机体101的右横部的前部及后部安装接触防止部件179、180
が
安装。
[0403]
也可以是,不仅将进入防止部件178安装于收割部103而是还安装于机体101。根据该结构,在将收割部3上升操作的情况下,进入防止部件178留在图15所示的位置的附近。
[0404]
在姿势改变部162中,也可以废除环状转动体164及爪体165,由引导部163构成姿势改变部162。
[0405]
也可以取代履带型式的行进装置102,而设为具备多个行进用的车轮(无图示)的行进装置102。
[0406]
[第3实施方式]以下,基于附图说明作为本发明的一例的实施方式(第3实施方式)。
[0407]
图28~图41表示作为作物收割机的一例的毛豆收割机。
[0408]
在图28~图41中,f表示机体201的“前方向”,b表示机体201的“后方向”,u表示机体201的“上方向”,d表示机体201的“下方向”。r表示机体201的“右方向”,l表示机体201的“左方向”。
[0409]
(第3实施方式的毛豆收割机的整体结构)如图28及图29所示,借助左右履带型式的行进装置202支承机体201,在机体201的前部的左部设置有收割部203,在机体201的前部的右部设置有驾驶部204。
[0410]
在机体201的后部设置有分离部205,在分离部205的左侧设置有第2搬运体209(相当于搬运体)及引导轨道213,在机体201的右部设置有支承台206及作业甲板(deck)207,回收箱217被置于支承台206。
[0411]
(第3实施方式的收割部的结构)如图28、29、30所示,在收割部203的前部,左右从动轮245被绕沿斜向的上下方向的轴心p
´´
一周地旋转自如地支承。在收割部203的后部,左右驱动轮246被绕沿斜向的上下方向的轴心p
´´
两周地旋转自如地支承。该情况下,轴心p
´´
1和轴心p
´´
2互相平行。
[0412]
遍及右从动轮245及右驱动轮246地安装有橡胶带制的右第1搬运体208。遍及左从动轮245及左驱动轮246地安装有橡胶带制的左第1搬运体208。
[0413]
左右第1搬运体208遍及收割部203的全长地配合。多个辊247被旋转自如地支承于收割部203,借助辊247,第1搬运体208的配合部分(作物a的夹持部分)的相反侧被支承。在收割部203的前部安装有左右分割器248、心土铲249。
[0414]
以收割部203的前部在下侧、收割部203的后部在上侧的方式,收割部203被以侧视观察时倾斜的姿势沿前后方向地支承于机体201的前部的左部。
[0415]
在第1搬运体208,从动轮245的附近是搬运始端部208a,驱动轮246的附近是搬运终端部208b。由此,左右第1搬运体208从第1搬运体208的搬运始端部208a遍及至搬运终端部208b,在不扭转的情况下直线地向斜上侧的后侧伸出。
[0416]
(第3实施方式的分离部的结构)
如图28、29、30所示,分离部205被设置于机体201。在分离部205设置有第1上旋转体211(相当于上旋转体)、第1下旋转体212(相当于下旋转体)、第2上旋转体221(相当于上旋转体)、第2下旋转体222(相当于下旋转体)。
[0417]
在分离部205,在第1上旋转体211及第1下旋转体212、第2上旋转体221及第2下旋转体222的下侧设置有被沿前后方向配置的回收传送机210。
[0418]
在回收传送机210的后部的下侧沿左右方向地设置有搬运传送机214
が
,从回收传送机210的后部向后侧隔开既定间隔地设置有排出传送机215,在回收传送机210的下侧设置有扇车216。
[0419]
如图30及图33所示,在分离部205的右侧设置有壁部243、244。壁部243俯视观察时被在前后方向上配置,壁部244在俯视观察时被配置成与前后方向交叉的倾斜。在分离部205的左侧设置有壁部240、229。壁部240、229在俯视观察时被在前后方向上配置,在上侧的壁部240和下侧的壁部229之间设置有沿前后方向的开口部230。
[0420]
(第3实施方式的第1上旋转体及第1下旋转体、第2上旋转体及第2下旋转体的结构)如图30、33、34所示,在第1上旋转体211(第1下旋转体212、第2上旋转体221及第2下旋转体222)设置有轴部218和两个打击部219。
[0421]
轴部218形成为六边轴状。打击部219被平板状地形成,与互相相差180度的相位地与轴部218连结,沿半径方向外侧伸出。在打击部219的外端部安装有硬质橡胶制的边缘部220。
[0422]
如图34所示,设定成第1上旋转体211的旋转轨迹的直径d1与第1下旋转体212的旋转轨迹的直径d1相同。第2上旋转体221的旋转轨迹的直径d1和第2下旋转体222的旋转轨迹的直径d1被设定为相同,第2上旋转体221(第2下旋转体222)的旋转轨迹的直径d1被设定为与第1上旋转体211(第1下旋转体212)的旋转轨迹的直径d1相比直径稍小。
[0423]
(第3实施方式的第1上旋转体及第1下旋转体、第2上旋转体及第2下旋转体的配置)如图30、33、34所示,第1上旋转体211被绕第1上轴心p
´´
11(相当于上轴心)旋转自如地遍及壁部244和壁部240地被轴承223支承。
[0424]
第1下旋转体212在第1上轴心p
´´
11的下侧绕沿第1上轴心p
´´
11的第1下轴心p
´´
12(相当于下轴心)旋转自如地遍及壁部244和壁部229地被轴承223支承。
[0425]
第2上旋转体221绕第2上轴心p
´´
21(相当于上轴心)旋转自如地遍及壁部244和壁部240地被轴承223支承。
[0426]
第2下旋转体222在第2上轴心p
´´
21的下侧绕沿第2上轴心p
´´
21的第2下轴心p
´´
22(相当于下轴心)旋转自如地遍及壁部244和壁部229地被轴承223支承。
[0427]
如图30所示,第1上旋转体311及第1下旋转体312与第2上旋转体321及第2下旋转体322相比被靠第2搬运体309的搬运始端部309a侧(前侧)(参照后述的(第2搬运体的整体结构))地配置。
[0428]
第1上旋转体211及第1下旋转体212的第2搬运体209侧的部分以与第1上旋转体211及第1下旋转体212的第2搬运体209的相反侧的部分相比位于第2搬运体209的搬运始端部209a侧(前侧)的方式,将第1上旋转体211及第1下旋转体212(第1上轴心p
´´
11及第1下轴
心p
´´
12)相对于第2搬运体209俯视观察时倾斜(交叉)地配置。
[0429]
以第2上旋转体221及第2下旋转体222的第2搬运体209侧的部分位于比第2上旋转体221及第2下旋转体222的第2搬运体209的相反侧的部分靠第2搬运体209的搬运始端部209a侧(前侧)的位置的方式,将第2上旋转体221及第2下旋转体222(第2上轴心p
´´
21及第2下轴心p
´´
22)相对于第2搬运体209俯视观察时倾斜(交叉)地配置。
[0430]
与第1上旋转体211及第1下旋转体212(第1上轴心p
´´
11及第1下轴心p
´´
12)和第2搬运体209的角度b21相比,第2上旋转体221及第2下旋转体222(第2上轴心p
´´
21及第2下轴心p
´´
22)和第2搬运体209的角度b22被设定为较大。
[0431]
在第1上旋转体211(第2上旋转体221)的轴部218的第2搬运体209的相反侧的部分,经由传动轴224连接有驱动轴225,借助驱动轴225的动力,第1上旋转体211(第2上旋转体221)被向旋转方向c1旋转驱动(参照图34)。
[0432]
在第1下旋转体212(第2下旋转体222)的轴部218的第2搬运体209的相反侧的部分,经由传动轴224连接有驱动轴225,借助驱动轴225的动力,第1下旋转体212(第2下旋转体222)被向与旋转方向c1相反方向的旋转方向c2旋转驱动(参照图34)。
[0433]
(第3实施方式的姿势改变部及防尘罩的结构)如图28、29、32所示,在第1搬运体208的搬运终端部208b的上部安装有姿势改变部262。在姿势改变部262设置有引导部263、环状转动体264及爪体265。
[0434]
引导部263具备上侧及下侧的两组,从第1搬运体208的搬运终端部208b向后侧伸出,被俯视观察时斜向分离部205较近的一侧(右侧)地倾斜地配置。
[0435]
向第1搬运体208(驱动轮246)传递的动力分岔,被向环状转动体264传递,环状转动体264被沿图29的顺时针方向旋转驱动。爪体265沿环状转动体264的移动方向隔开既定间隔地安装于环状转动体264,被与环状转动体264一体地沿图29的顺时针方向旋转驱动。
[0436]
防尘罩226被以位于姿势改变部262的右侧的方式设置。防尘罩184将板材组合而构成为箱状,在防尘罩226的左部,开口部226a开口。
[0437]
防尘罩226相当于分离部205的入口,如后述(在毛豆收割机的收割整体的流程中为收割部处的状态)所述那样,作物a的上部倒入地进入防尘罩226的开口部226a,从防尘罩226进入分离部205。
[0438]
(第3实施方式的第2搬运体的整体结构)如图28、31、32所示,在机体201的左部支承有驱动机构227,在驱动机构227设置有绕左右方向的轴心被旋转驱动的驱动链轮齿227a。在机体201的左部的前部,旋转轮255、256被绕左右方向的轴心旋转自如地支承,在机体201的左部的后部,旋转轮257被绕左右方向的轴心旋转自如地支承。
[0439]
遍及驱动机构227的驱动链轮齿227a及旋转轮255、256、257地安装有第2搬运体209,在机体201的左部(分离部205的左侧),第2搬运体209被沿前后方向地配置。第2搬运体209被驱动机构227的驱动链轮齿227a沿图28及图31的顺时针方向旋转驱动。
[0440]
第2搬运体209从第1搬运体208的搬运终端部208b向后侧伸出,在第2搬运体209,旋转轮255和旋转轮256之间的部分为搬运始端部209a,旋转轮257的附近为搬运终端部209b。
[0441]
第2搬运体209的搬运始端部209a的前部分(旋转轮255的部分)被配置于比第2搬
运体209的搬运始端部209a的后部分(旋转轮256的部分)靠下侧的位置,第2搬运体209的搬运始端部209a被沿第1搬运体208的搬运终端部208b的下侧配置成斜向上的倾斜姿势。
[0442]
第2搬运体209的从搬运始端部209a的后部分(旋转轮256的部分)遍及至搬运终端部209b的部分被配置成侧视观察时呈大致水平姿势。
[0443]
(第3实施方式的第2搬运体的具体的结构)如图35、36、39、40所示,在第2搬运体209设置有第1部分231、第2部分232、连接部分233、销234及套管(
カラー
)235。
[0444]
第1部分231形成为细长的平板状(杆状),在前后中央部设置有侧视观察时为三角形的第1突部231a。
[0445]
第2部分232与第1部分231相同地形成为细长的平板状(杆状),在前后中央部设置于侧视观察时为三角形的第2突部232a。
[0446]
连接部分233与第2部分232相同地形成为细长的平板状(杆状),形成为与第2部分232相同的长度,但未设有突部。
[0447]
第1部分231被在左右方向交替地配置,同时第1部分231的前部及后部重合。第2部分232及连接部分233被在左右方向上交替地配置,同时第2部分232及连接部分233的前部及后部重合。在第1部分231和第2部分232之间配置有套管235的状态下,销234被插入,销234被安装于第1部分231及第2部分232(连接部分233)。
[0448]
由此,第1部分231被销234连接,第2部分232及连接部分233被销234连接,第2搬运体209构成为环状的链状。第1部分231及第2部分232(连接部分233)被隔开相当于套管235的长度的间隔地配置,在销234的部分,第1部分231及第2部分232(连接部分233)能够自由地弯曲。
[0449]
(第3实施方式的第2搬运体的配置)如图35、38、39所示,细长的支承部件228遍及旋转轮255的位置和旋转轮257的位置地与壁部229的上部连结,在第2搬运体209,销234及套管235搭载于支承部件228。由此,从第2搬运体209的搬运始端部209a的后部分(旋转轮256的部分)遍及搬运终端部209b的部分被被配置成侧视观察时呈大致水平姿势。
[0450]
若第2搬运体209被驱动机构227旋转驱动,则销234及套管235沿支承部件228移动,由此,第1部分231及第2部分232(连接部分233)从旋转轮255的位置向旋转轮257的位置移动。
[0451]
如图35、39、40所示,在第2搬运体209,第1部分231配置于支承部件228的左侧,被配置于距分离部205较远的一侧。第2部分232及连接部分233被配置于支承部件228的右侧,配置于距分离部205较近的一侧,稍微进入开口部230。
[0452]
支承部件228主视观察时进入第1部分231及第2部分232(连接部分233)之间,第2搬运体209(第1部分231及第2部分232、连接部分233)的左右方向的位置被支承部件228确定。
[0453]
第1部分231被沿第2搬运体209的移动方向排列地配置,第1部分231的第1突部231a被隔开第1间隔w1地设置。第1部分231的第1突部231a遍及旋转轮255的位置和旋转轮257的位置地向上侧(引导轨道213侧)突出。
[0454]
第2部分232及连接部分233被沿第2搬运体209的移动方向排列地配置,第2部分
232的第2突部232a被隔开第2间隔w2地设置。第2部分232的第2突部232a遍及旋转轮255的位置和旋转轮257的位置地向上侧(引导轨道213侧)突出。
[0455]
连接部分233设置于第2部分232和第2部分232之间,由此,第2间隔w2比第1间隔w1大。该情况下,第2部分232和连接部分233长度相同,所以第2间隔w2为第1间隔w1的2倍。
[0456]
(第3实施方式的引导轨道的结构)如图28、31、32所示,引导轨道213被沿第2搬运体209的上侧配置,在引导轨道213设置有第1轨道部分241及第2轨道部分242、销236。
[0457]
如图35、37、38、39所示,板材被通道状地折弯,构成第1轨道部分241,在第1轨道部分241设置有上侧部241a、从上侧部241a向下侧伸出的横侧部241b、241c。在第1轨道部分241,横侧部241b、241c的前后长度比上侧部241a的前后长度长,在横侧部241b、241c的从上侧部241a伸出的部分,圆孔状的开口部241d开口。
[0458]
设置有板状的左右第2轨道部分242,在第2轨道部分242,长孔状的开口部242a开口。第2轨道部分242进入第1轨道部分241,第1轨道部分241和第2轨道部分242被连结。
[0459]
如前所述地连结的第1轨道部分241及第2轨道部分242被沿第2搬运体209排列地配置。在前后排列的第1轨道部分241及第2轨道部分242中,第2轨道部分242被插入第1轨道部分241的横侧部241b、241c的内侧,遍及第1轨道部分241的开口部241d和第2轨道部分242的开口部242a地安装有销236。
[0460]
由此,第1轨道部分241及第2轨道部分242被销236连接,能够在销236的部分弯曲。
[0461]
如图28、31、32所示,由圆棒材构成的导引部件261在引导轨道213安装于第2搬运体209的搬运始端部209a侧的前端的第1轨道部分241。导引部件261沿第2搬运体209向前伸出,从第2搬运体209的搬运始端部209a的后部分(旋转轮256的部分)在侧视观察时斜向上地向前伸出。
[0462]
由圆棒材构成的导引部件252在引导轨道213被安装于第2搬运体209的搬运终端部209b侧的后端的第1轨道部分241。导引部件252沿第2搬运体209向后伸出,从第2搬运体209的搬运终端部209b(旋转轮257的部分)在侧视观察时斜向下地向后伸出。
[0463]
(第3实施方式的引导轨道的支承结构)如图31及图32所示,在机体201的左部的上部沿前后方向地支承有支承框258。如图35、37、38、39所示,管状的引导部件237被沿上下方向地安装于支承框258,支承杆259被上下移动自如地插入引导部件237。
[0464]
在支承杆259的上端部安装有环状的阻挡部件238及固定销239。阻挡部件238及固定销239与引导部件237的上端部碰撞,由此确定支承杆259的上下移动的下限位置。
[0465]
在支承杆259的下端部连结有连接部件250。在连接部件250设置有圆形的承接部250a、承接部250a的边缘部分被向上侧折弯的防脱部250b、承接部250a的边缘部分被向下侧折弯的横侧部250c。
[0466]
如前述(引导轨道的结构)所述,遍及第1轨道部分241的开口部241d和第2轨道部分242的开口部242a地安装销236的情况下,销236也被插入连接部件250的横侧部250c的开口部,连接部件250(支承杆259)与引导轨道213(第1轨道部分241及第2轨道部分242)连接。
[0467]
在引导部件237的下端部安装有承接部件251,遍及连接部件250的承接部250a和承接部件251地安装有弹簧260,支承杆259被弹簧260向第2搬运体209侧(下侧)施力。
[0468]
在支承杆259位于下限位置的状态下,弹簧260呈被从自由长度稍压缩的状态,在弹簧260产生初始作用力。弹簧260的从连接部件250的承接部250a的脱离被连接部件250的防脱部250b防止。
[0469]
(第3实施方式的第2搬运体和引导轨道的位置关系)如图28及图31所示,在引导轨道213,第2搬运体209的搬运始端部209a侧的先头的第1轨道部分241为搬运始端部213a,第2搬运体209的搬运终端部209b侧的后端的第2轨道部分242为搬运终端部213b。
[0470]
如图31及图32所示,引导轨道213的搬运始端部213a在侧视观察时位于比第2搬运体209的搬运始端部209a的后部分(旋转轮256的部分)稍靠后侧的位置。引导轨道13的搬运终端部213b在侧视观察时位于比第2搬运体209的搬运终端部209b(旋转轮257的部分)稍靠前侧的位置。
[0471]
如图39所示,引导轨道213的距分离部205较近的一侧的部分(第1轨道部分241的横侧部241c及右第2轨道部分242)后视及俯视观察时相对于第2搬运体209的第2部分232及连接部分233配置于距分离部205较远的一侧(左侧),配置于第2搬运体209的第1部分231和第2部分232及连接部分233之间。
[0472]
引导轨道213的距分离部205较远的一侧的部分(第1轨道部分241的横侧部241b及左第2轨道部分242)后视及俯视观察时被相对于第2搬运体209的第1部分231配置于距分离部205较远的一侧(左侧)。
[0473]
由此,第2搬运体209的第1部分231在后视及俯视观察时,被配置于引导轨道213的第1轨道部分241的横侧部241b、241c及第2轨道部分242之间。
[0474]
如图38及图39所示,支承杆259位于下限位置的状态下,引导轨道213的第1轨道部分241的横侧部241c及第2轨道部分242的下端部从第2搬运体209的销234及套管235稍向上侧离开。
[0475]
支承杆259位于下限位置的状态下,引导轨道213的第1轨道部分241的横侧部241b、241c及第2轨道部分242、第2搬运体209的第1部分231的第1突部231a及第2部分232的第2突部232a在侧视观察时重叠。
[0476]
(第3实施方式的毛豆收割机的收割整体的流程中收割部处的状态)关于毛豆收割机的收割的整体的流程,将各部分处的状态如以下那样地在本项(毛豆收割机的收割整体的流流程中分离部处的回收传送机、搬运传送机及排出传送机处的状态)按顺序说明。
[0477]
如图28及图29所示,在收割部203,在分割器248接触田地而心土铲249进入田地的状态下,若使机体201前进,则田地的作物a被分割器248分开,由心土铲249挖开田地,同时田地的起立姿势的作物a进入左右第1搬运体208的搬运始端部208a。
[0478]
借助左右第1搬运体208,田地的起立姿势的作物a被从左侧及右侧夹持,作物a被左右第1搬运体208拔出而被抬起,作物a维持起立姿势的同时被沿收割部203向斜上侧的后侧搬运。
[0479]
若作物a到达第1搬运体208的搬运终端部208b,则在从第1搬运体208的搬运终端部208b向第2搬运体209的搬运始端部209a的交接部分,借助姿势改变部262,起立姿势的作物a的姿势被改变成分离部205侧的横倒姿势,作物a的上部以倒入的方式进入防尘罩226的
开口部226a。
[0480]
(第3实施方式的毛豆收割机的收割整体的流程中基于第2搬运体及引导轨道的作物的搬运状态)随着作物a的上部倒入地进入防尘罩226的开口部226a,作物a的株干a1被向第2搬运体209的搬运始端部209a交接,横倒姿势的作物a的株干a1被导引部件261导引,同时被夹持于第2搬运体209的搬运始端部209a和引导轨道213的搬运始端部213a之间。
[0481]
如图31及图32所示,若作物a的株干a1被夹持于第2搬运体209和引导轨道213之间,则借助作物a的株干a1,引导轨道213(第1轨道部分241及第2轨道部分242)折弯而被向上侧抬起,借助弹簧260的作用力,在第2搬运体209和引导轨道213(第1轨道部分241及第2轨道部分242)之间,作物a的株干a1被充分的夹持力夹持。
[0482]
横倒姿势的作物a的株干a1被夹持于第2搬运体209和引导轨道213之间的状态下,若第2搬运体209被旋转驱动,则借助第2搬运体209(第1部分231的第1突部231a及第2部分232的第2突部232a),作物a的株干a1被向后侧搬运,所以作物a从分离部205的开口部230进入分离部205的内部,被从第2搬运体209的搬运始端部209a向搬运终端部209b搬运。
[0483]
(第3实施方式的毛豆收割机的收割整体的流程中被第2搬运体及引导轨道搬运时的作物的状态)作物a的株干a1被第2搬运体209向后侧搬运的情况下,如图40及图41所示,有时作物a的株干a1的距分离部205较远的部分在第2搬运体209的移动方向上位于第2搬运体209(第1部分231)的第1突部231a和第1突部231a之间。
[0484]
作物a的株干a1的接近分离部205的部分在第2搬运体209的移动方向上有时位于第2搬运体209(第2部分232及连接部分233)的第2突部232a和第2突部232a之间。
[0485]
作物a的株干a1的接近分离部205较远的部分及分离部205的部分在上下方向上位于第2搬运体(第1部分231、第2部分232及连接部分233)和引导轨道213(第1轨道部分241及第2轨道部分242)之间。
[0486]
第2搬运体(第2部分232及连接部分233)的第2突部232a的第2间隔w2被设定成比第2搬运体(第1部分231)的第1突部231a的第1间隔w1大。
[0487]
作物a的株干a1的距分离部205较远的部分在第2搬运体209(第1部分231)的第1突部231a和第1突部231a之间能够相对于第2搬运体209沿第2搬运体209的移动方向向上方侧及下方侧移动。
[0488]
该情况下,第1间隔w1较小,由此,作物a的株干a1的距分离部205较远的部分的移动范围较小。
[0489]
作物a的株干a1的距分离部205较近的部分在第2搬运体209(第2部分232及连接部分233)的第2突部232a和第2突部232a之间能够相对于第2搬运体209沿第2搬运体209的移动方向上方侧及下方侧移动。
[0490]
该情况下,第2间隔w2较大,由此,作物a的株干a1的接近分离部205的部分的移动范围较大。
[0491]
由此,将第2搬运体209的第1部分231(作物a的株干a1的距分离部205较远的部分)的附近作为支点,作物a的株干a1的距分离部205较近的部分在第2搬运体209(第2部分232及连接部分233)的第2突部232a和第2突部232a之间能够沿第2搬运体209的移动方向向上
方侧及下方侧移动。
[0492]
相对于作物a的株干a1的接近分离部205的部分,连接部分233位于第2搬运体209的搬运始端部209a侧的作物a中,作物a的上部在靠近第2搬运体209的搬运始端部209a侧的范围d1呈容易移动的状态(容易振动的状态)。
[0493]
相对于作物a的株干a1的接近分离部205的部分,连接部分233位于第2搬运体209的搬运终端部209b侧的作物a中,作物a的上部呈在靠近第2搬运体209的搬运终端部209b侧的范围d2容易移动的状态(容易振动的状态)。
[0494]
该情况下,作物a的上部欲越过范围d1、d2地移动时(振动时),作物a的株干a1的接近分离部205的部分被第2搬运体209(第2部分232及连接部分233)的第2突部232a阻止,作物a的上部的移动(振动)被阻止。
[0495]
如图41所示,为在第2搬运体209(第2部分232及连接部分233)的正上方不存在引导轨道213的第1轨道部分241的横侧部241c、242c及第2轨道部分242的状态,所以呈作物a的上部从横倒姿势在上侧的范围d3容易移动的状态(容易振动的状态)。
[0496]
该情况下,作物a的上部欲越过范围d3地移动时(振动时),作物a的株干a1的接近分离部205的部分被第2搬运体209(第2部分232及连接部分233)阻止(被引导轨道213的第1轨道部分241的横侧部241c及第2轨道部分242阻止),作物a的上部的移动(振动)被阻止。
[0497]
(第3实施方式的毛豆收割机的收割整体的流程中分离部(第1上旋转体及第1下旋转体、第2上旋转体及第2下旋转体)处的状态)如图29及图30所示,若横倒姿势的作物a被第2搬运体209及引导轨道213向后侧搬运,则在分离部205,作物a首先进入第1上旋转体211和第1下旋转体212之间。
[0498]
如图34所示,第1上旋转体211的打击部219及第1下旋转体212的打击部219呈交替地重复与作物a碰撞的状态,呈作物a被推向第2搬运体209的搬运始端部209a侧的状态,果实a2被从作物a分离而下落至回收传送机210(参照前述的(第3实施方式的分离部的结构))。
[0499]
接着,作物a进入第2上旋转体221和第2下旋转体222之间。呈第2上旋转体221的打击部219及第2下旋转体222的打击部219交替地重复地与作物a碰撞的状态,呈作物a被推向第2搬运体209的搬运始端部209a侧的状态,果实a2被从作物a分离而下落至回收传送机210。
[0500]
第1上旋转体211及第1下旋转体212被相对于第2搬运体209具有角度b21地倾斜配置。第2上旋转体221及第2下旋转体222被相对于第2搬运体209具有角度b22地倾斜配置。
[0501]
第1上旋转体211(第2上旋转体221)的旋转方向c1、及第1下旋转体212(第2下旋转体222)的旋转方向c2被设定(参照前述的(第3实施方式的第1上旋转体及第1下旋转体、第2上旋转体及第2下旋转体的配置))。
[0502]
由此,第1上旋转体211(第2上旋转体221)的打击部219、及第1下旋转体212(第2下旋转体222)的打击部219与作物a碰撞时,在作物a的株干a1被夹持于第2搬运体209及引导轨道213的状态下,产生欲将作物a从株干a1侧(第2搬运体209侧)向上部侧拉出的分力,所以能够在不将作物a向株干a1侧压缩而压弯从而折弯的情况下将作物a从果实a2轻易地分离。
[0503]
前述的(第3实施方式的毛豆收割机的收割整体的流程中被第2搬运体及引导轨道
的搬运时的作物的状态)的记载如图40及图41所示,呈作物a的上部容易在范围d1、d2、d3移动的状态(容易振动的状态)。
[0504]
由此,第1上旋转体211(第2上旋转体221)的打击部219、及第1下旋转体212(第2下旋转体222)的打击部219与作物a碰撞时,即使欲对作物a的上部施加较大的分离作用,作物a的上部也在范围d1、d2、d3移动(振动),由此,能够将较大的分离作用从作物a的上部放出,能够避免作物a的上部(茎)弯折那样的状态。
[0505]
(第3实施方式的毛豆收割机的收割整体的流程中分离部处的回收传送机、搬运传送机及排出传送机下的状态)如图28、29、30所示,借助第1上旋转体211及第1下旋转体212、第2上旋转体221及第2下旋转体222,果实a2被从作物a分离,被分离的果实a2下落至回收传送机210。果实a2从作物a分离时叶等碎渣也一起被分离而向回收传送机210下落。
[0506]
分离了果实a2的作物a被向后侧搬运而引导轨道213的搬运终端部213b脱离时,被第2搬运体209及导引部件252夹持,被从第2搬运体209的搬运终端部209b及导引部件252向田地放出。
[0507]
回收传送机210被向后侧旋转驱动,下落至回收传送机210的果实a2及碎渣被回收传送机210向后侧搬运,从回收传送机210的后部下落至搬运传送机214。
[0508]
扇车216的搬运风从回收传送机210的下侧流向后侧,穿过回收传送机210和排出传送机215之间,在排出传送机215的上侧流向后侧。
[0509]
果实a2及碎渣从回收传送机210的后部下落时,果实a2抵抗扇车216的搬运风地下落至搬运传送机214。碎渣由于扇车216的搬运风飞起而搭载于排出传送机215,搭载于排出传送机215的碎渣被排出传送机215向后侧搬运而被向田地放出。
[0510]
搬运传送机214被向支承台206侧旋转驱动,多个回收箱217被搭载于支承台206。下落至搬运传送机214的果实a2被搬运传送机214向支承台6侧搬运,被向位于搬运传送机214的搬运终端部的回收箱217投入。作业甲板207的辅助作业者在位于搬运传送机214的搬运终端部的回收箱217装满时,更换成空的回收箱217。
[0511]
(第3实施方式的第1其他方式)在第2搬运体209,第2部分232及连接部分233被交替地配置的情况下,也可以不使用一个连接部分233而是将两个以上的连接部分233沿第2搬运体209的移动方向连接地使用。根据该结构,第2间隔w2长至第1间隔w1的3倍以上。
[0512]
(第3实施方式的第2其他方式)也可以是,在第2搬运体209中,不对第2部分232使用连接部分233,而将沿第2部分232左右方向交替地配置来连接。在该结构中,相对于第1部分231使用1个或2个以上的连接部分233来将第1部分231及连接部分233交替地配置来连接即可。由此,第1间隔w1比第2间隔w2长。
[0513]
(第3实施方式的第3其他方式)也可以将一个或多个比第1部分231的第1突部231a及第2部分232的第2突部232a小的突部(无图示)设置于连接部分233。
[0514]
根据该结构,作物a的上部在范围d1、d2移动时(振动时),从连接部分233的突部向作物a的上部作用较轻的阻力,抑制作物a的上部的急剧的移动(振动)。
[0515]
(第3实施方式的第4其他方式)也可以是,将第1上旋转体211及第1下旋转体212(第1上轴心p
´´
11及第1下轴心p
´´
12)相对于第2搬运体209俯视观察时倾斜(交叉)地配置,使得第1上旋转体211及第1下旋转体212的第2搬运体209侧的部分位于比第1上旋转体211及第1下旋转体212的第2搬运体209的相反侧的部分靠第2搬运体209的搬运终端部209b侧(后侧)的位置。
[0516]
根据该结构,将第1上旋转体211及第1下旋转体212的旋转方向c1、c2设定成,第1上旋转体211的打击部219及第1下旋转体212的打击部219将作物a推向第2搬运体209的搬运终端部209b侧即可。
[0517]
(第3实施方式的第5其他方式)也可以是,将第2上旋转体221及第2下旋转体222(第2上轴心p
´´
21及第2下轴心p
´´
22)相对于第2搬运体209俯视观察时倾斜(交叉)地配置,使得第2上旋转体221及第2下旋转体222的第2搬运体209侧的部分位于比第2上旋转体221及第2下旋转体222的第2搬运体209的相反侧的部分靠第2搬运体209的搬运终端部209b侧(后侧)的位置。
[0518]
根据该结构,将第2上旋转体221及第2下旋转体222的旋转方向c1、c2设定成,第2上旋转体221的打击部219及第2下旋转体222的打击部219将作物a推向第2搬运体209的搬运终端部209b侧即可。
[0519]
(第3实施方式的第6其他方式)也可以在机体201的前部的右部设置收割部203(第1搬运体208)、第2搬运体209及引导轨道213。根据该结构,分离部205被设于第2搬运体209及引导轨道213的左侧。
[0520]
产业上的可利用性本发明不仅毛豆收割机,也能够应用于收割大豆等作物a的作物收割机,也能够应用于不仅将田地的作物a拔出、还将田地的作物a的株干a1的附近切割等地切断、将根部留于田地的同时收割作物a的作物收割机。
[0521]
附图标记说明[第1实施方式]5分离部11第1搬运体11b第1搬运体的搬运终端部12第2搬运体12a第2搬运体的搬运始端部12a1侧面12a2侧面13引导轨道13a引导轨道的搬运始端部13a1侧面13a2侧面52驱动轴(下侧传动)62姿势改变部63引导部
64环状转动体65爪体66传动轴(上侧传动轴)72分配传动部73传动部76株干支承部77株干引导部81茎部引导部82上部引导部a作物a1作物的株干a2作物的果实p1、p2轴心b1假想线[第2实施方式]101机体102行进装置103收割部105分离部111第1搬运体111b第1搬运体的搬运终端部112第2搬运体112a第2搬运体的搬运始端部138摆动支承部141油压压力缸(升降机构)150摆动支点部151摆动支点部152驱动轴153传动轴162姿势改变部163引导部164环状转动体165爪体172负荷支承部173第1支承部件174第2支承部件a作物a1作物的株干a2作物的果实
c通路p
´
1轴心p
´
2轴心p
´
3轴心p
´
4轴心p
´
5轴心p
´
11支承轴心[第3实施方式]203收割部205分离部209第2搬运体(搬运体)209a搬运始端部211第1上旋转体(上旋转体)212第1下旋转体(下旋转体)221第2上旋转体(上旋转体)222第2下旋转体(下旋转体)213引导轨道231第1部分232第2部分231a第1突部232a第2突部a作物a1株干a2果实c1旋转方向c2旋转方向p
´´
11第1上轴心(上轴心)p
´´
12第1下轴心(下轴心)p
´´
21第2上轴心(上轴心)p
´´
22第2下轴心(下轴心)w1第1间隔w2第2间隔。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1