一种自动化红薯起拢采收机的制作方法
1.本发明涉及农机设备领域,具体涉及一种自动化红薯起拢采收机。
背景技术:
2.红薯属于我国重要经济作物之一,由于红薯生长在泥土下并且有块茎,在其收获方面有很多难题,传统的收获方式不仅效率不高,还无法保证质量和产率,这样就在一定程度上限制了红薯的发展,因此市场上出现了一种红薯收获机能够保证一定的产能和效率,但是常规的红薯收获机的挖掘装置不能够根据红薯在底下的深浅而调节铲座的高度,在挖掘的过程中,埋藏较深的红薯经常会出现遗漏。
技术实现要素:
3.为了解决上述技术存在的缺陷,本发明提供一种自动化红薯起拢采收机。
4.本发明实现上述技术效果所采用的技术方案是:
5.一种自动化红薯起拢采收机,包括履带式机动装置以及与所述机动装置的一侧固定连接的起拢装置,所述机动装置在靠近所述起拢装置的一侧的履带的上方设有一倾斜的挡泥板,所述起拢装置包括与机动装置固定连接的后传送架以及与所述后传送架连接的前传送架,所述后传送架与前传送架上设有传送机构,所述传送机构连接有驱动机构,所述前传送架的前端部连接有用于起拢的铲刀和前导轮,所述前导轮通过一曲臂轴可转动地连接在所述前传送架的前端部,所述后传送架在与所述前传送架连接的位置设有两支左右并列的液压缸,所述液压缸的缸身固定在所述后传送架上,所述液压缸的液压导杆与所述前传送架的底部铰接。
6.优选地,在上述的自动化红薯起拢采收机中,所述驱动机构包括电机、传动辊和传动链,所述电机设在所述后传送架的尾部端的下方,所述传动辊设在所述后传送架的尾部端,所述传动链传动连接在所述电机的主动齿轮和所述传动辊上。
7.优选地,在上述的自动化红薯起拢采收机中,所述后传送架的下部连接有固定架,所述电机固定在所述固定架上,所述固定架在对应于所述后传送架的尾部端的位置设有竖向设置的连接板,所述连接板上设有可转动的链条规整导轮。
8.优选地,在上述的自动化红薯起拢采收机中,所述液压缸的缸身固定在固定架上。
9.优选地,在上述的自动化红薯起拢采收机中,所述铲刀包括与所述前传送架连接的刀架,所述刀架的前端设有三角形的刀头,在所述刀头与所述刀架之间设有圆形筛棍,相邻的所述圆形筛棍之间设有用于落土的间隔空隙。
10.优选地,在上述的自动化红薯起拢采收机中,所述传送机构包括两条相对的柔性传送链以及连接在两所述柔性传送链之间的筛土杆,所述筛土杆之间设有用于落土的筛土空隙。
11.优选地,在上述的自动化红薯起拢采收机中,所述后传送架在靠近所述前传送架的一端设有第一被动转辊,所述前传送架在靠近所述铲刀的一端设有第二被动转辊,所述
柔性传送链传动连接在所述传动辊、所述第一被动转辊和所述第二被动转辊上。
12.优选地,在上述的自动化红薯起拢采收机中,所述后传送架的上部设有后挡板,所述前传送架的上部设有前挡板。
13.本发明的有益效果为:本发明的自动化红薯起拢采收机可以根据红薯在底下的深浅而调节前传送架的倾斜度,避免埋藏较深的红薯经常会出现遗漏的情况。设置在刀头与刀架之间的圆形筛棍,可以将铲起的土壤从相邻的圆形筛棍之间的间隔空隙中落出,柔性传送链以及连接在柔性传送链之间的筛土杆可以在带动红薯和土壤移动的同时,将土壤从筛土杆之间的筛土空隙落出,进而使红薯与土壤进行分离,方便捡获。机动装置在靠近起拢装置的一侧的履带的上方的倾斜的挡泥板的斜面朝外,从起拢装置上落下的土壤落在该倾斜设置的挡泥板上,借助其斜坡面滑落至外侧,避免对该侧的履带造成负担,同时,该挡泥板可将起拢装置上落下的土壤导流至外侧,即不落在机动装置行走的路径上,避免对筛出的红薯进行再次掩埋。
附图说明
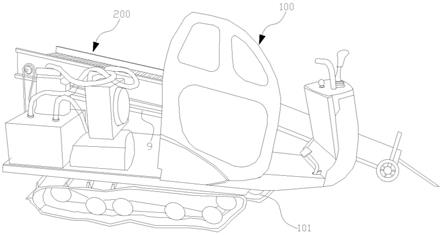
14.图1为本发明的结构示意图;
15.图2为本发明的挡泥板的位置示意图;
16.图3为本发明的结构示意图;
17.图4为本发明所述铲刀的结构示意图;
18.图5为本发明所述传送机构的局部结构示意图;
19.图6为本发明所述曲臂轴的结构示意图;
20.图7为本发明所述曲臂与前传送架的结构示意图。
具体实施方式
21.为使对本发明作进一步的了解,下面参照说明书附图和具体实施例对本发明作进一步说明。
22.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
23.如图1至图3所示,本发明实施例提出的一种自动化红薯起拢采收机,该采收机包括履带式机动装置100以及与机动装置100的一侧固定连接的起拢装置200。因履带式机动装置100需要行走在红薯地中,故其车体宽度不能设计过大,因此,起拢装置200需要设置在同侧的履带101的上方,为避免起拢装置200上落下的土壤堆积在该侧的履带101上,故机动装置100在靠近起拢装置200的一侧的履带101的上方设有一倾斜的挡泥板9,该挡泥板9的斜面朝外,从起拢装置200上落下的土壤落在该倾斜设置的挡泥板9上,借助其斜坡面滑落至外侧,避免对该侧的履带101造成负担,同时,该挡泥板9可将起拢装置200上落下的土壤导流至外侧,即不落在机动装置100行走的路径上,避免对筛出的红薯进行再次掩埋。
24.具体地,在本发明的优选实施例中,如图3至图5所示,该起拢装置200包括与机动装置100固定连接的后传送架1以及与后传送架1连接的前传送架2。后传送架1与前传送架2
上设有传送机构3,该传送机构3连接有驱动机构7,驱动机构7为传送机构3提供驱动力,使得传送机构3实现传送功能。前传送架2的前端部连接有用于起拢的铲刀4和前导轮5,铲刀4的下沿低于前导轮5的底部轮缘所在的平面,前导轮通过一曲臂轴51可转动地连接在前传送架2的前端部,通过曲臂轴51的转动,可以调节前导轮5底部轮缘所在的平面与铲刀4下沿之间的高度落差。后传送架1在与前传送架2连接的位置设有两支左右并列的液压缸8,液压缸8的缸身固定在后传送架1上,液压缸8的液压导杆与前传送架2的底部铰接。通过液压缸8的液压导杆的伸缩,可以调节前传送架2的倾斜度,使得铲刀4的铲入角度得到调整。
25.具体地,如图6和图7所示,前传送架2的前端部的侧壁设有若干个排列呈弧形的销轴孔23,在转动曲臂轴51到合适的角度位置时,在对应于曲臂轴51的曲臂511的下游侧方向插入一个销轴即可,在角度的限制下,前传送架2前行时,曲臂511的下游侧方向插入的销轴对曲臂511构成拦阻,使得前导轮5固定在一个相应的高度。
26.进一步地,在本发明的优选实施例中,驱动机构7包括电机71、传动辊72和传动链73,电机71设在后传送架1的尾部端的下方。传动辊72设在后传送架1的尾部端,传动链73传动连接在电机71的主动齿轮和传动辊72上。后传送架1的下部连接有固定架6,电机71固定在固定架6上,固定架6在对应于后传送架1的尾部端的位置设有竖向设置的连接板61,连接板61上设有可转动的链条规整导轮74。
27.进一步地,在本发明的优选实施例中,液压缸8的缸身固定在固定架6上。如图2所示,铲刀4包括与前传送架2连接的刀架41,刀架41的前端设有三角形的刀头42,在刀头42与刀架41之间设有圆形筛棍43,相邻的圆形筛棍43之间设有用于落土的间隔空隙44。传送机构3包括两条相对的柔性传送链31以及连接在两柔性传送链31之间的筛土杆32,筛土杆32之间设有用于落土的筛土空隙。后传送架1在靠近前传送架2的一端设有第一被动转辊12,前传送架2在靠近铲刀4的一端设有第二被动转辊22,柔性传送链31传动连接在传动辊72、第一被动转辊12和第二被动转辊22上。为避免土壤分离之后筛选出来的红薯从旁边两侧落出,后传送架1的上部设有后挡板11,前传送架2的上部设有前挡板21。
28.综上所述,本发明的自动化红薯起拢采收机可以根据红薯在底下的深浅而调节前传送架的倾斜度,避免埋藏较深的红薯经常会出现遗漏的情况。设置在刀头与刀架之间的圆形筛棍,可以将铲起的土壤从相邻的圆形筛棍之间的间隔空隙中落出,柔性传送链以及连接在柔性传送链之间的筛土杆可以在带动红薯和土壤移动的同时,将土壤从筛土杆之间的筛土空隙落出,进而使红薯与土壤进行分离,方便捡获。
29.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内,本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1