一种无线控制剪刀的制作方法
[0001]
本发明涉及一种无线控制剪刀,尤其是用户使用剪刀加长杆来实现高位置树枝或者远距离的树枝修剪的控制技术。
背景技术:
[0002]
现有的原始加长杆内部走线,将放置于手柄端的信号以及电池功率传输到加长杆末端的剪刀,由剪刀判断该有线信号做出相应的动作,这样布设加长杆受制于走线所使用的长度,且加长杆内部走线在长期使用时,会出现信号接触不良的现象。
技术实现要素:
[0003]
有鉴于此,本发明的主要目的是提供一种无线控制剪刀。
[0004]
本发明采用的技术方案是:
[0005]
一种无线控制剪刀,包括
[0006]
手柄端,与手柄端连接的伸缩杆,
[0007]
设置在伸缩杆末端的夹头组件,
[0008]
设置在夹头组件上的剪刀端;
[0009]
所述手柄端包括把手外壳,设置在把手外壳上的板机部,设置在把手外壳一侧的电池组件,以及设置在把手外壳内部的发射模块;
[0010]
所述板机部设置有板机组件,在板机组件上设置有磁铁;
[0011]
所述发射模块上设置有霍尔元件,扣动扳机时,霍尔元件用于感应板机组件上磁铁的动作,并将感应到的磁铁的动作转化为霍尔信号,发射模块将霍尔信号发送至剪刀端内设置的接收端,接收端依据接收的霍尔信号做出判断并执行相应的动作。
[0012]
进一步地,所述电池组件上设置有连接器,连接器设置在把手外壳内部,且位于电池组件的上部,所述连接器与连接线连接,所述连接线与发射模块连接,
[0013]
所述连接器与指示灯连接。
[0014]
进一步地,所述把手外壳的右侧设置有垫脚。
[0015]
进一步地,所述夹头组件包括内夹头组件,用于与伸缩杆固定;
[0016]
外夹头组件,固定在内夹头组件上,用于与剪刀端固定。
[0017]
进一步地,所述内夹头组件包括上内夹头和下内夹头,
[0018]
上内夹头和下内夹头将伸缩杆包裹后固定。
[0019]
进一步地,所述外夹头组件包括左外夹头和右外夹头,
[0020]
左外夹头和右外夹头分别固定在内夹头组件的左右两侧,
[0021]
左外夹头和右外夹头固定后其上部形成一固定槽,用于与剪刀端固定。
[0022]
进一步地,所述接收端包括无线接收控制模块,所述无线接收控制模块包括电源电路、剪刀单片机电路、接收无线信号电路、温度检测电路、电流检测电路、电机过零检测电路、电机高速过零检测电路、蜂鸣器驱动电路以及峰值过流值电路,所述电源电路分别与剪
刀单片机电路、接收无线信号电路、温度检测电路、电流检测电路、电机过零检测电路、电机高速过零检测电路、蜂鸣器驱动电路以及峰值过流值电路连接,所述剪刀单片机电路分别与接收无线信号电路、温度检测电路、电流检测电路、电机过零检测电路、电机高速过零检测电路、蜂鸣器驱动电路以及峰值过流值电路连接。
[0023]
进一步地,所述接收无线信号电路通过j1端子与剪刀连接,所述接收无线信号电路用于接收发射模块的霍尔信号,通过引脚s2保持与发射模块检测到霍尔信号一致。
[0024]
进一步地,所述剪刀单片机电路用于实时检测引脚pin24电平,当检测到引脚pin24电平转为低电平时,无线接收控制模块接收放置在手柄端的发射模块的霍尔信号;
[0025]
此时,手柄端的发射模块上的霍尔元件感应扳机上设置的磁铁动作,剪刀做出闭口动作;
[0026]
当该用户松开手柄上的扳机,则手柄端的发射模块发出信号,由剪刀端的接收端接收信号,剪刀单片机电路检测到引脚pin24转为高电平时,则做出开口信号。
[0027]
本发明中伸缩杆内部无走线,手柄端放置发射模块,伸缩杆末端剪刀内放置无线接收控制模块,并且该无线接收控制模块与剪刀实现电平读取;
[0028]
手柄端的发射模块与放置于剪刀端的无线接收控制模块(或者是放置于锯子上的无线接收控制模块,或者是其他工具内的无线接收控制模块)在任一时刻只有一个发射模块与无线接收控制模块对应,也即手柄端的扳机扣下时任一时刻仅有一个接收模块响应该动作。
[0029]
剪刀端固定在伸缩杆的夹头组件上,剪刀端上使用的剪刀单片机实时检测引脚(pin24
--
p0.7)电平,常规电平为高电平,当该引脚检测到电平转为低电平时,说明放置于剪刀端的无线接收控制模块接收到了放置在手柄端的发射模块的有效信号,也就是手柄端的发射模块上的霍尔感应到了扳机上面的磁铁,也即说明用户扣下了手柄上的扳机,此时剪刀做出闭口动作;当该用户松开手柄上的扳机,则手柄上的发射模块发出信号,由剪刀端的无线接收控制模块接收信号,剪刀端使用的剪刀单片机检测到该引脚转为高电平,则做出开口信号。
附图说明
[0030]
图1是本发明的结构结构图;
[0031]
图2是本发明中手柄端的爆炸式结构示意图;
[0032]
图3是本发明中夹头组件的爆炸式结构示意图;
[0033]
图4是本发明中电源电路的电路图;
[0034]
图5是本发明中剪刀单片机电路的电路图;
[0035]
图6是本发明中接收无线信号电路的电路图;
[0036]
图7是本发明中温度检测电路的电路图;
[0037]
图8是本发明中电流检测电路的电路图;
[0038]
图9是本发明中电机过零检测电路的电路图;
[0039]
图10是本发明中电机高速过零检测电路的电路图;
[0040]
图11是本发明中蜂鸣器驱动电路的电路图;
[0041]
图12是本发明中电池电压检测电路的电路图;
[0042]
图13是本发明中峰值过流值电路的电路图。
具体实施方式
[0043]
下面将结合附图以及具体实施例来详细说明本发明,在此本发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
[0044]
参照图1至图3,本发明公开了一种无线控制剪刀,包括
[0045]
手柄端100,与手柄端100连接的伸缩杆200,
[0046]
设置在伸缩杆200末端的夹头组件300,
[0047]
设置在夹头组件300上的剪刀端400;
[0048]
所述手柄端100包括把手外壳101,设置在把手外壳上的板机部109,设置在把手外壳一侧的电池组件102,以及设置在把手外壳内部的发射模块106;
[0049]
所述板机部设置有板机组件107,在板机组件包括板机以及设置在板机上的磁铁;
[0050]
所述发射模块106上设置有霍尔元件(也可以是干簧管),扣动扳机时,霍尔元件用于感应板机组件上磁铁的动作,并将感应到的磁铁的动作转化为霍尔信号,发射模块将霍尔信号发送至剪刀端内设置的接收端,接收端依据接收的霍尔信号做出判断并执行相应的动作。
[0051]
所述电池组件上设置有连接器104,连接器104设置在把手外壳内部,且位于电池组件的上部,所述连接器与连接线连接,所述连接线与发射模块连接,
[0052]
所述连接器与指示灯108连接。
[0053]
所述把手外壳的右侧设置有垫脚103。
[0054]
所述夹头组件300包括内夹头组件,用于与伸缩杆200固定;
[0055]
外夹头组件,固定在内夹头组件上,用于与剪刀端400固定。
[0056]
所述内夹头组件包括上内夹头302和下内夹头304,
[0057]
上内夹头和下内夹头将伸缩杆300包裹后固定。
[0058]
所述外夹头组件包括左外夹头301和右外夹头303,
[0059]
左外夹头和右外夹头分别固定在内夹头组件的左右两侧,
[0060]
左外夹头和右外夹头固定后其上部形成一固定槽,用于与剪刀端固定。
[0061]
进一步地,所述接收端包括无线接收控制模块,所述无线接收控制模块包括电源电路、剪刀单片机电路、接收无线信号电路、温度检测电路、电流检测电路、电机过零检测电路、电机高速过零检测电路、蜂鸣器驱动电路以及峰值过流值电路,所述电源电路分别与剪刀单片机电路、接收无线信号电路、温度检测电路、电流检测电路、电机过零检测电路、电机高速过零检测电路、蜂鸣器驱动电路以及峰值过流值电路连接,所述剪刀单片机电路分别与接收无线信号电路、温度检测电路、电流检测电路、电机过零检测电路、电机高速过零检测电路、蜂鸣器驱动电路以及峰值过流值电路连接。
[0062]
所述接收无线信号电路通过j1端子与剪刀连接,所述接收无线信号电路用于接收发射模块的霍尔信号,通过引脚s2保持与发射模块检测到霍尔信号一致。
[0063]
所述剪刀单片机电路用于实时检测引脚pin24电平,当检测到引脚pin24电平转为低电平时,无线接收控制模块接收放置在手柄端的发射模块的霍尔信号;
[0064]
此时,手柄端的发射模块上的霍尔元件感应扳机上设置的磁铁动作,剪刀做出闭
口动作;
[0065]
当该用户松开手柄上的扳机,则手柄端的发射模块发出信号,由剪刀端的接收端接收信号,剪刀单片机电路检测到引脚pin24转为高电平时,则做出开口信号。
[0066]
参照图4,剪刀端还包括设置在剪刀端内部的电源模块,该电源模块采用降压型开关稳压芯片xl1509-12e1,该电源管理芯片是一款单芯片异步降压电源ic-xl1509-12e1,电源管理芯片集成100mω的流制mosfet,可提供8-30v之间宽电压输入2a连续负载电流。电流模式控制下提供快速瞬响应和逐周期电软启动时间可调可防止浪涌电流导通和关断模式,电源电流降至1μa以下,在本应用中通过r53和r55,实现稳定的输出+12v,再通过三端稳压器件78m05,实现稳定的5v输出,供给剪刀端使用的剪刀单片机供电。
[0067]
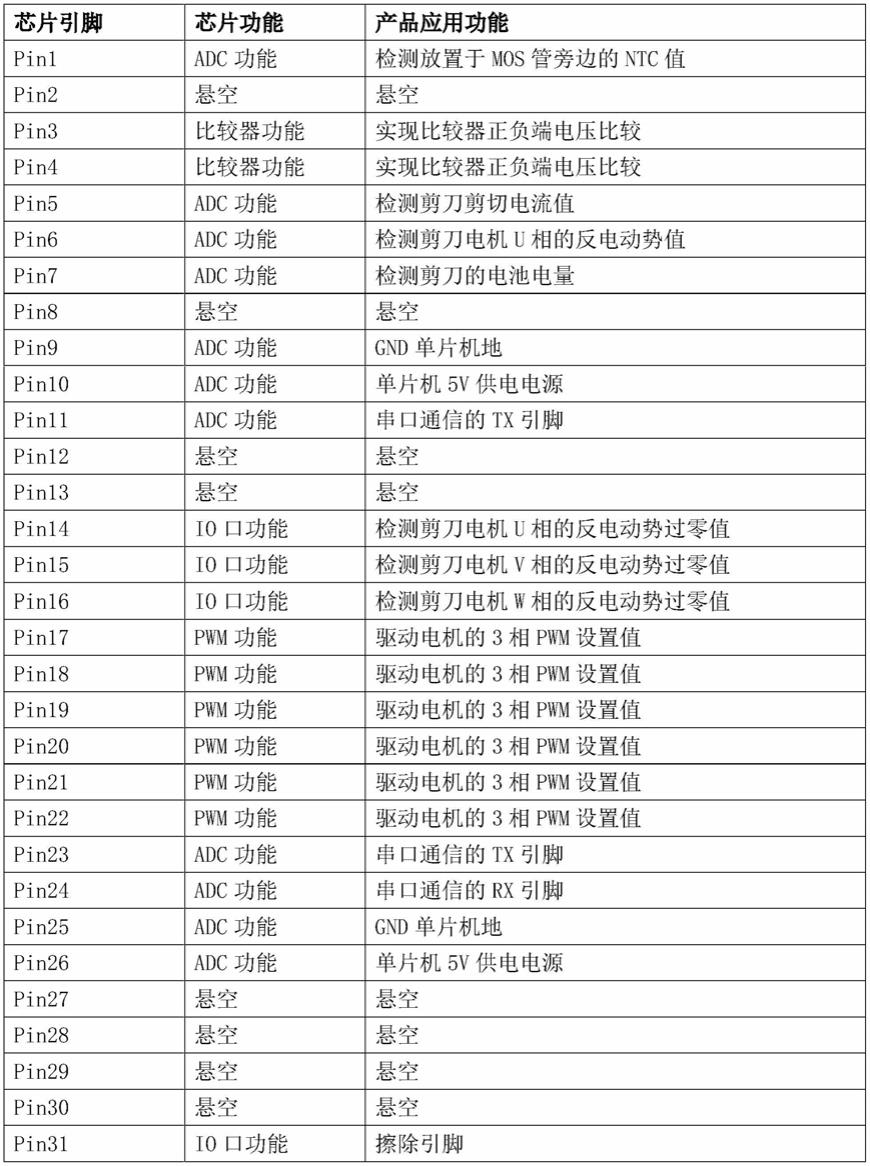
参照图5,剪刀单片机使用的是xmc1301-032型单片机,使用资源包括芯片io口输入输出功能,adc功能,tim的pwm功能,分别实现如下功能:
[0068]
表1剪刀单片机引脚功能定义
[0069][0070]
[0071]
芯片io口输入输出功能分别实现如下功能引脚功能定义如下表:
[0072]
表2-1单片机引脚配置
[0073][0074]
电源开启,单片机上电,配置单片机系统资源,配置所需要的功能检测引脚包括timer1,timer2,adc,io口输入输出等功能。
[0075]
系统主函数实时执行函数,2ms执行函数,5毫秒执行函数,20ms执行函数其中,具体如下表:
[0076][0077]
参照图6,接收无线信号电路通过j1端子与剪刀端连接,包含供电的5v以及系统地线和信号引脚s1、引脚s2,接收无线信号电路用于接收发射模块的霍尔信号,引脚s2保持与发射模块检测到的霍尔信号一致,配对时,发射端按下扳机上电,指示灯常亮;15s进入配对状态,配对状态下指示灯闪烁,当引脚s1低电平进入配对状态同时把引脚s2电平拉低,配对完成后再将引脚s2电平升高,接收端不休眠。
[0078]
参照图7,该部分电路使用ntc温度传感器来检测剪刀端的刀片温度,ntc温度传感器是一种热敏电阻、探头,电阻值随着温度上升而迅速下降,将该ntc放置于加热片内部,实现与加热片实际温度同步;ntc温度传感器放置于mos管旁边,ntc温度传感器通过与电阻r38分压,并且通过一级滤波rc电路实现与剪刀单片机的连接,剪刀单片机通过adc功能口来检测当前刀片温度,从而知晓当前mos管温度,实现温度控制。
[0079]
参照图8,该部分电路使用5mr的取样电阻串联在电机驱动回路上,通过读取该电阻上面的电压,根据偶欧姆定律可以计算得到电流,从而可以感值剪刀的剪切负载情况。
[0080]
参照图9,在三相无刷直流电机上并联电阻,通过分压取样可计算得出当前相的电压值,单剪刀片机通过adc功能可获取任何时刻的3相电压值,通过比较不同的电压值可以知晓电机过零点,从而实现电机的稳定换相,实现电机的持续稳定运行。
[0081]
参照图10,当电机转速过快时候,仅通过取样电流值,可能存在时序无法对应的时刻,故在三相无刷直流电机上并联电阻,通过分压取样并通过比较器(lm339)可以得到当前的剪刀电机位置值,剪刀单片机通过检测分压取样对应的3个引脚值,并根据电机转动时序可以实现电机高速情况下的持续稳定运行。
[0082]
参照图11,根据图10中剪刀单片机通过检测分压取样对应的3个引脚值,通过分压取样并通过比较器(lm339)可以得到当前的剪刀电机位置值,超过阈值报警。
[0083]
参照图12,电池电压通过在电池输入端并联2个检测电阻r1和r3,通过r1与r3分压之后经r2和c2的一级rc滤波后接到单片机引脚,单片机配置adc功能,检测该引脚的电压值,通过计算r1与r3的分压比例计算得出当前的电池电压。
[0084]
参照图13,通过两个电阻r7和r14分压之后经c6的滤波后接到单片机引脚,单片机配置比较器功能,检测该输入两个引脚的电压值,内部可知比较结果,并作出相应的动作。
[0085]
当用户的需要配对另一工具剪刀,可同时将需要配对的工具按住扳机30s进行配对,此配对只能一对一的情况下进行。
[0086]
以上对本发明实施例所公开的技术方案进行了详细介绍,本文中应用了具体实施例对本发明实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本发明实施例的原理;同时,对于本领域的一般技术人员,依据本发明实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1