一种山地果园双悬臂伸缩式采摘机的制作方法
[0001]
本实用新型属于丘陵山地果园机械装备技术领域,具体涉及一种山地果园双悬臂伸缩式采摘机。
背景技术:
[0002]
我国林果业经济效益显著,是能够给人们带来收益的传统产业。因此,林果种植越来越规模化,种植面积也不断扩大。但一般果树是劳动密集型栽培作物,收获作业是其生产过程的重要环节,目前人工采摘作业效率低、危险性大,并且劳动力成本逐年升高,导致果农收获成本也逐渐提高,降低了市场竞争力。因此,采摘作业机械得到了进一步的推广应用。
[0003]
目前,市场上采摘作业机械大多是剪叉式采摘作业平台,其作业姿态单一,作业范围小,并且转移果实困难。在凹凸不平的丘陵山地果园中轮式叉车的稳定性差,叉车的适用范围和运载能力受到极大的限制,导致采摘后的果品运输困难。目前大多数用于果园内搬运果实的叉车多为离地间隙较小的轮式结构,因此,迫切需要一种对任意位置的果实都可轻松采摘,并可装运果实的一种山地果园双悬臂式伸缩采摘机。该双悬臂伸缩采摘作业机构具有作业范围广,操作简单,姿态可调,实用性强,安全可靠等优点,可提高果农的经济效益和采收作业效率,降低果农劳动强度。
技术实现要素:
[0004]
针对现有技术中存在的上述问题,本实用新型提出了一种山地果园双悬臂伸缩式采摘机,该双悬臂伸缩式采摘机操控简便、适应性好、作业安全可靠、采摘效率高、且能运输果实,能够更好的满足丘陵山地果实采摘需求,具有很好的实用和推广价值。
[0005]
一种山地果园双悬臂伸缩式采摘机,主要包括:作业平台、伸缩悬臂、货叉机构和动力车身;
[0006]
所述作业平台包括人机交互屏、活动式爬梯、果框、果框升降液压缸、姿态角传感器、控制踏板、作业平台框架、平台调平控制器、平台调平电磁阀、主控制器、果框升降电磁阀、平台调平液压缸;所述平台调平控制器和主控制器安装均在人机交互屏的外壳内部;所述人机交互屏安装在作业平台框架上;所述果框与作业平台框架连接,且之间设置有果框升降液压缸;所述活动式爬梯与作业平台框架连接,可帮助工作人员登上作业平台工作;所述控制踏板安装在作业平台框架内部底端;所述姿态角传感器镶嵌在作业平台框架底部,为自动调平提供角度数据;所述作业平台框架与伸缩杆通过铰链连接,且作业平台框架与伸缩杆间设置有平台调平液压缸;
[0007]
所述伸缩悬臂包括伸缩杆、悬臂伸缩液压缸、悬臂角度调节液压缸、底层转盘回转机构、上层转盘回转机构、悬臂、悬臂伸缩电磁阀、悬臂角度调节电磁阀、底层旋转电机和上层旋转电机;所述悬臂与伸缩杆连接且之间设置有悬臂伸缩液压缸;所述底层转盘回转机构与右侧悬臂通过铰链连接,且在之间设置有悬臂角度调节液压缸;所述上层转盘回转机
构与左侧悬臂通过铰链连接,且在之间设置有悬臂角度调节液压缸,上层转盘回转机构穿过底层转盘回转机构与上层旋转电机连接;所述底层旋转电机与底层转盘回转机构连接;
[0008]
所述货叉机构包括货叉角度调节液压缸、货叉提升液压缸、门架、安装板、货叉、步进电机、货叉提升电磁阀和货叉角度调节电磁阀;所述门架与动力车身连接,且之间设置有货叉角度调节液压缸,通过货叉角度调节液压缸的伸缩来调节货叉的俯仰角度,以便于果实搬运时的装卸;所述安装板与门架连接,且之间设置有货叉提升液压缸;所述货叉与安装板连接;所述步进电机焊接在安装板上;搬运作业完成后通过步进电机的转动实现货叉的180度旋转,使得货叉折叠到动力车身上,可以极大地减少该机构的占地空间,缩小整机尺寸;
[0009]
所述动力车身包括动力机底盘、液压站、全向摄像头和电池;所述全向摄像头连接在动力机底盘外壳上;所述液压站、底层旋转电机、上层旋转电机和电池固定安装在动力机底盘内部;所述果框升降液压缸通过果框升降电磁阀与液压站连接;所述平台调平液压缸通过平台调平电磁阀与液压站连接;所述悬臂伸缩液压缸通过悬臂伸缩电磁阀与液压站连接;所述悬臂角度调节液压缸通过悬臂角度调节电磁阀与液压站连接;所述货叉角度调节液压缸通过货叉角度调节电磁阀与液压站连接;所述货叉提升液压缸通过货叉提升电磁阀与液压站连接。
[0010]
作为优选,所述人机交互屏选用触摸屏;
[0011]
作为优选,所述果框升降液压缸选用三节液压缸,其安装所占空间小,可增大果框的升降范围;
[0012]
作为优选,所述动力机底盘为履带式电动底盘,更加适应丘陵山地的崎岖地形;
[0013]
作为优选,所述步进电机选用双头步进电机。
[0014]
本实用新型采取以上的技术方案,其具备以下优点:采摘作业平台可实现自动调平,安全性好,实用性强,操作简单;悬臂可伸缩,工作时采摘范围广,非工作时机身体积小;双臂式机体可实现相对平衡、高效、灵活、自由的采摘作业;折叠货叉工作时可灵活的的搬运、装载果实,非工作时货叉折叠减小该实用新型整体体积,使其可以更自由地在崎岖狭小的果园中移动;采用履带式电动底盘,可适应丘陵山地果园复杂的地形,降低采摘机对环境的污染,符合倡导的绿色环保理念。
[0015]
综上所述,本实用新型的一种山地果园双悬臂伸缩式采摘机,用于在丘陵山地果园中高效采摘搬运果实。
[0016]
附图说明:
[0017]
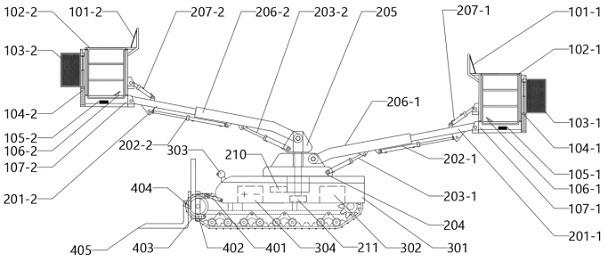
图1为本实用新型一种山地果园双悬臂伸缩式采摘机采摘装运状态结构示意图;
[0018]
图2为本实用新型一种山地果园双悬臂伸缩式采摘机收缩移动状态结构示意图;
[0019]
图3为本实用新型一种山地果园双悬臂伸缩式采摘机控制连接示意图(1);
[0020]
图4为本实用新型一种山地果园双悬臂伸缩式采摘机控制连接示意图(2);
[0021]
图5为本实用新型一种山地果园双悬臂伸缩式采摘机的货叉结构示意图;
[0022]
图中:101.人机交互屏;102.活动式爬梯;103.果框;104.果框升降液压缸;105.姿态角传感器;106.控制踏板;107.作业平台框架;108.平台调平控制器;109.平台调平电磁阀;110.主控制器;111.果框升降电磁阀;201.伸缩杆;202.悬臂伸缩液压缸;203.悬臂角度调节液压缸;204.底层转盘回转机构;205.上层转盘回转机构;206.悬臂;207.平台调平液
压缸;208.悬臂伸缩电磁阀;209.悬臂角度调节电磁阀;210.底层旋转电机;211.上层旋转电机;301.动力机底盘;302.液压站;303.全向摄像头;304.电池;401.货叉角度调节液压缸;402.货叉提升液压缸;403.门架;404.安装板;405.货叉;406.步进电机;407.货叉提升电磁阀;408.货叉角度调节电磁阀。
具体实施方式
[0023]
为了使本实用新型的技术方案及优点更加清楚明白,下面结合附图及具体实施方式对本实用新型实施例中的技术方案进行清晰、完整的描述,在下面的描述中阐述了很多细节,以便于充分理解本实用新型。
[0024]
如附图所示:
[0025]
一种山地果园双悬臂伸缩式采摘机,主要包括:作业平台、伸缩悬臂、货叉机构和动力车身;
[0026]
所述作业平台包括人机交互屏(101)、活动式爬梯(102)、果框(103)、果框升降液压缸(104)、姿态角传感器(105)、控制踏板(106)、作业平台框架(107)、平台调平控制器(108)、平台调平电磁阀(109)、主控制器(110)、果框升降电磁阀(111)、平台调平液压缸(207);所述平台调平控制器(108)和主控制器(110)安装均在人机交互屏(101)的外壳内部;所述人机交互屏(101)安装在作业平台框架(107)上;可通过人机交互屏(101)控制所安装的作业平台框架(107)倾斜水平,果框(103)升降,伸缩悬臂俯仰、屈伸和旋转,可通过连接底层转盘回转机构(204)的人机交互屏(101)观察车头前方地形,控制货叉(405)升降角度调整,控制动力车身移动;所述果框(103)与作业平台框架(107)连接,且之间设置有果框升降液压缸(104);所述活动式爬梯(102)与作业平台框架(107)连接,所述活动式爬梯(102)可帮助工作人员登上作业平台工作;所述控制踏板(106)安装在作业平台框架(107)内部底端,作为控制人机交互屏(101)的开关;所述姿态角传感器(105)镶嵌在作业平台框架(107)底部,为作业平台调平提供平台角度数据;所述作业平台框架(107)与伸缩杆(201)通过铰链连接,且作业平台框架(107)与伸缩杆(201)间设置有平台调平液压缸(207);通过平台调平液压缸(207)屈伸来实现作业平台调平;工作人员可通过人机交互屏(101)控制作业平台框架(107)和果框(103)升降;
[0027]
所述伸缩悬臂包括伸缩杆(201)、悬臂伸缩液压缸(202)、悬臂角度调节液压缸(203)、底层转盘回转机构(204)、上层转盘回转机构(205)、悬臂(206)、悬臂伸缩电磁阀(208)、悬臂角度调节电磁阀(209)、底层旋转电机(210)和上层旋转电机(211);所述悬臂(206)与伸缩杆(201)连接且之间设置有悬臂伸缩液压缸(202),通过悬臂伸缩液压缸(202)的伸缩实现伸缩杆(201)的伸缩;所述底层转盘回转机构(204)与右侧悬臂(206-1)通过铰链连接,且在之间设置有悬臂角度调节液压缸(203-1);所述上层转盘回转机构(205)与左侧悬臂(206-2)通过铰链连接,且在之间设置有悬臂角度调节液压缸(203-2),上层转盘回转机构(205)穿过底层转盘回转机构(204)与上层旋转电机(211)连接;所述底层旋转电机(210)与底层转盘回转机构(204)连接;电机的旋转带动回转机构转动,以实现伸缩悬臂的旋转,通过悬臂角度调节液压缸(203)的伸缩实现悬臂(206)的俯仰;
[0028]
所述货叉机构包括货叉角度调节液压缸(401)、货叉提升液压缸(402)、门架(403)、安装板(404)、货叉(405)、步进电机(406)、货叉提升电磁阀(407)和货叉角度调节电
磁阀(408)。所述门架(405)与动力车身连接,且之间设置有货叉角度调节液压缸(401),通过货叉角度调节液压缸(401)的伸缩来调节货叉(405)的俯仰角度,以便于果实搬运时的装卸;所述安装板(404)与门架(403)连接,且之间设置有货叉提升液压缸(402),通过货叉提升液压缸(402)的提升来实现安装板(404)和货叉(405)提升从而进行搬运作业;所述货叉(405)与安装板(404)连接;所述步进电机(406)焊接在安装板(404)上,为货叉(405)折叠提供动力;搬运作业完成后通过步进电机(406)的转动实现货叉(405)的180度旋转,使得货叉(405)折叠到动力车身上,可以极大地减少该机构的占地空间,缩小整机尺寸;
[0029]
所述动力车身包括动力机底盘(301)、液压站(302)、全向摄像头(303)和电池(304);所述全向摄像头(303)连接在动力机底盘(301)外壳上,作业平台上的作业人员可通过人机交互屏(101)观察前方的地形,使得作业过程中采摘机能安全的移动;所述液压站(302)、底层旋转电机(210)、上层旋转电机(211)和电池(304)固定安装在动力机底盘(301)内部;所述果框升降液压缸(104)通过果框升降电磁阀(111)与液压站(302)连接,通过果框升降液压缸(104)的伸缩实现果框(103)的升降;所述平台调平液压缸(207)通过平台调平电磁阀(109)与液压站(302)连接,通过平台调平液压缸(207)的伸缩实现作业平台的姿态调整;所述悬臂伸缩液压缸(202)通过悬臂伸缩电磁阀(208)与液压站(302)连接,通过悬臂伸缩液压缸(202)的伸缩实现伸缩杆(201)的伸缩;所述悬臂角度调节液压缸(203)通过悬臂角度调节电磁阀(209)与液压站(302)连接,通过悬臂角度调节液压缸(203)的伸缩实现实现悬臂(206)的俯仰;所述货叉角度调节液压缸(401)通过货叉角度调节电磁阀(408)与液压站(302)连接;所述货叉提升液压缸(402)通过货叉提升电磁阀(407)与液压站(302)连接,通过货叉角度调节液压缸(401)和货叉提升液压缸(402)的伸缩实现货叉(405)的俯仰和升降。
[0030]
作为优选,所述人机交互屏(101)选用触摸屏;
[0031]
作为优选,所述果框升降液压缸(104)选用三节液压缸,其安装所占空间小可增大果框的升降范围;
[0032]
作为优选,所述动力机底盘(301)为履带式动力底盘,更加适应丘陵山地的崎岖地形;
[0033]
作为优选,所述步进电机(406)选用双头步进电机。
[0034]
本实用新型工作原理:
[0035]
一种山地果园双悬臂伸缩式采摘机,作业人员可通过下放活动式爬梯(102)登上或离开作业平台;当作业人员登上或离开后将活动式爬梯(102)上滑成为作业平台框架(107)四周护栏的一部分,在作业平台框架(107)上可通过人机交互屏(101)观察采摘机前方的地形,通过操作控制踏板(106)和人机交互屏(101)来实现果框(103)的升降,悬臂(206)和货叉(405)的姿态调整,以及动力机底盘(301)的行走和转向;同时姿态角传感器(105)实时传出数据给平台调平控制器(108),平台调平控制器(108)控制平台调平液压缸(207),实现作业平台自动调平,保证作业平台里的作业人员在丘陵山地果园复杂的地形作业时一直处于竖直状态,使得作业人员能安全的进行采摘作业;当作业完成后伸缩悬臂调整姿态收缩下降,货叉(405)旋转180度折叠到动力车身上,使动力车身运动更加方便。
[0036]
上面以具体实施例予以说明本实用新型的结构与工作原理,本实用新型并不局限于以上实施例,根据上述的说明内容,凡在本实用新型精神与原则之上所作的任何修改、同
等替换和改进等,未做出创造性劳动的任何实施例,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1