一种用于果实采摘的冗余并联六杆机器人
1.本实用新型属于农业机器人技术领域,具体涉及一种用于果实采摘的冗余并联六杆机器人。
背景技术:
2.人工采摘水果费时、费力,随着科学技术的发展,机械智能化程度不断提高,人工采摘逐渐被采摘机器人所代替。现有的水果采摘机器人多采用机械手抓取水果,但机械手容易对水果造成损伤。而且,现有的水果采摘机器人需要精确定位到水果的位置才可实现采摘,由于位置误差较大,往往不能达到很高的水果摘取率。
技术实现要素:
3.本实用新型设计了一种用于果实采摘的冗余并联六杆机器人,旨在减小果实表皮损伤、提高机器人对准水果的精确度以提高果实摘取率。
4.为了实现上述目的,本实用新型采用了以下方案:
5.一种用于果实采摘的冗余并联六杆机器人,包括机架、采摘通道、视觉识别模块和控制器,所述机架包括上盘、下盘和若干支腿,所述下盘设置在所述支腿的顶部,所述上盘与下盘之间通过六个电动推杆和三条气动冗余支腿连接,六个电动推杆均分为三组且以所述采摘通道为中心均布在所述上盘与下盘之间,所述三条气动冗余支腿以所述采摘通道为中心均布在所述上盘与下盘之间且与所述三组电动推杆相间布置;所述电动推杆及所述气动冗余支腿的上下两端分别与所述上盘和所述下盘铰接连接;所述视觉识别模块设置在所述上盘上,所述控制器设置在所述机架上;所述采摘通道的采摘口设置在所述上盘中央的通孔处,所述采摘口通过柔性管与缓冲收集装置的一端连接,所述缓冲收集装置的另一端与吸力装置连接;所述缓冲收集装置设置在所述下盘下方,所述柔性管是可伸缩的管结构且穿过所述下盘中央的通孔与所述缓冲收集装置连接。
6.进一步,所述采摘口采用特斯拉阀设计。
7.进一步,所述上盘的本体是等边三角形板,且所述等边三角形板的三个顶角分别被平行于对边的平面截去。
8.进一步,所述机架的支腿有三条,所述支腿的下端设置有万向轮。
9.进一步,所述气动冗余支腿采用气动弹簧。
10.进一步,所述缓冲收集装置的下部出口处设置有阀门,所述阀门内壁及周边覆盖有硅胶层,所述阀门通过连杆、摇杆与舵机连接,所述舵机通过舵机底座安装在所述吸力装置的底座上,所述阀门转动连接在所述缓冲收集装置的下部,且所述阀门闭合时将所述缓冲收集装置的下部出口密封;所述阀门内壁上还设置有称重传感器。
11.进一步,所述缓冲收集装置下部的出口下方还设置有收集箱,所述收集箱的四壁及底部铺设有缓冲材料。
12.进一步,所述吸力装置采用涵道电机。
13.进一步,所述视觉识别模块采用双目摄像头。
14.进一步,所述控制器采用stm32控制器。
15.进一步,所述电动推杆包括电机和推杆,所述推杆和电机整合在同一基座上;所述基座通过下铰链座与所述下盘铰接连接,所述推杆的伸缩端通过上铰链座与所述上盘铰接连接。
16.工作时,控制器接收到来自视觉识别模块的信号后,控制电动推杆动作从而带动上盘上的采摘口移动以精确对准果实; 然后,吸力装置工作,果实通过采摘通道、缓冲收集装置进入收集箱。
17.具体地,当缓冲收集装置果实出口的阀门上没有果实时,称重传感器没有检测到重物,阀门关闭;当阀门上有果实时,称重传感器检测到重物,并触发舵机带动阀门打开,果实落入收集箱完成收集;果实落入收集箱后,称重传感器没有检测到重物,舵机带动阀门关闭。
18.该用于果实采摘的冗余并联六杆机器人具有以下有益效果:
19.(1)本实用新型通过六个电动推杆和三条气动冗余推杆的配合,提高了驱动能力,降低了系统的复杂性和控制难度,可以实现采摘通道精确对准水果的功能,提高了果实采摘率。
20.(2)本实用新型通过吸力装置和采摘通道的配合,完成果实采摘,保护了果实表皮不受损伤,从而避免了现有技术中机械爪抓取果实时对果实的损害。
21.(3)本实用新型结构稳定,成本低,灵活性好。
附图说明
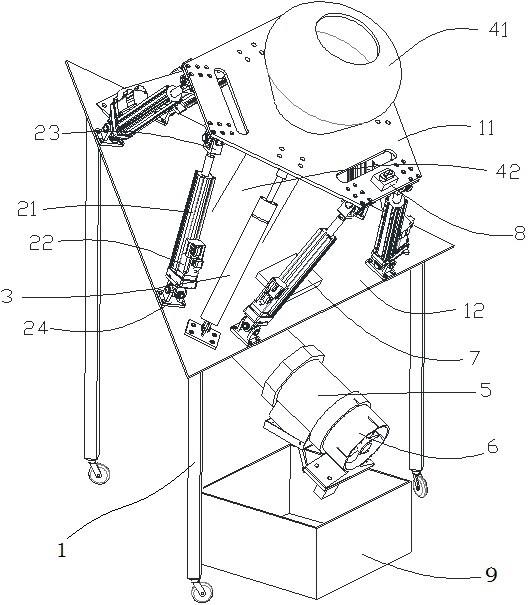
22.图1:本实用新型实施方式中用于果实采摘的冗余并联六杆机器人的结构示意图;
23.图2:本实用新型实施方式中缓冲收集装置及吸力装置的结构示意图ⅰ;
24.图3:本实用新型实施方式中缓冲收集装置及吸力装置的结构示意图ⅱ;
25.图4:本实用新型实施方式中采摘口的结构示意图。
26.附图标记说明:
27.1—机架;11—上盘;12—下盘;2—电动推杆;21—推杆;22—电机;23—上铰链座;24—下铰链座;3—气动冗余支腿;41—采摘口;42—柔性管;5—缓冲收集装置;51—舵机;52—阀门;53—连杆;54—摇杆;6—吸力装置;7—控制器;8—视觉识别模块;9—收集箱。
具体实施方式
28.下面结合附图,对本实用新型做进一步说明:
29.图1至图4示出了本实用新型一种用于果实采摘的冗余并联六杆机器人的具体实施方式。图1是本实施方式中用于果实采摘的冗余并联六杆机器人的结构示意图;图2和图3是本实施方式中缓冲收集装置及吸力装置的结构示意图;图4是本实施方式中采摘口的结构示意图。
30.如图1所示,本实施方式中的用于果实采摘的冗余并联六杆机器人,包括机架1、采摘通道、视觉识别模块8和控制器7,机架1包括上盘11、下盘12和若干支腿,下盘12设置在所述支腿的顶部,上盘11与下盘12之间通过六个电动推杆2和三条气动冗余支腿3连接,六个
电动推杆2均分为三组且以所述采摘通道为中心均布在上盘11与下盘12之间,三条气动冗余支腿3以所述采摘通道为中心均布在上盘11与下盘12之间且与三组电动推杆2相间布置;电动推杆2及气动冗余支腿3的上下两端分别与上盘11和下盘12铰接连接;视觉识别模块8设置在上盘11上,控制器7设置在机架1上;所述采摘通道的采摘口41设置在上盘11中央的通孔处,采摘口41通过柔性管42与缓冲收集装置5的一端连接,缓冲收集装置5的另一端与吸力装置6连接;缓冲收集装置5设置在下盘12下方,柔性管42是可伸缩的管结构且穿过下盘12中央的通孔与缓冲收集装置5连接。
31.优选地,采摘口41采用特斯拉阀设计,如图1和图4所示,增强了采摘口41的吸力。
32.优选地,上盘11的本体是等边三角形板,且所述等边三角形板的三个顶角分别被平行于对边的平面截去,如图1所示。
33.优选地,机架1的支腿有三条,所述支腿的下端设置有万向轮,如图1所示。
34.优选地,气动冗余支腿3采用气动弹簧,如图1所示。
35.优选地,缓冲收集装置5的下部出口处设置有阀门52,阀门52内壁及周边覆盖有硅胶层,阀门52通过连杆53、摇杆54与舵机51连接,舵机51通过舵机底座安装在吸力装置6的底座上,阀门52转动连接在缓冲收集装置5的下部,且阀门52闭合时将缓冲收集装置5的下部出口密封;阀门52内壁上还设置有称重传感器,如图2和图3所示。本实施例中,称重传感器没有画出。
36.优选地,缓冲收集装置5下部的出口下方还设置有收集箱9,收集箱9的四壁及底部铺设有缓冲材料,如图1所示。内部的缓冲材料保证果实的质量。
37.当果实出口的阀门52上没有果实时,称重传感器没有检测到重物,阀门52关闭;当阀门52上有果实时,称重传感器检测到重物,并触发舵机51带动阀门52打开,果实落入收集箱9完成收集;果实落入收集箱9后,称重传感器没有检测到重物,舵机51带动阀门52关闭。
38.优选地,吸力装置6采用涵道电机,如图1、图2和图3所示,具有较大的吸力,效率较高。
39.优选地,视觉识别模块8采用双目摄像头。
40.本实施例中,控制器7采用stm32控制器。
41.本实施例中,电动推杆2包括电机22和推杆21,推杆21和电机22整合在同一基座上;所述基座通过下铰链座24与下盘12铰接连接,推杆21的伸缩端通过上铰链座23与上盘11铰接连接,如图1所示。
42.工作时,控制器7接收到来自视觉识别模块8的信号后,控制电动推杆2动作从而带动上盘11上的采摘口41移动以精确对准果实; 然后,吸力装置6工作,果实通过采摘通道、缓冲收集装置5进入收集箱9。
43.本实用新型通过六个电动推杆和三条气动冗余推杆的配合,提高了驱动能力,降低了系统的复杂性和控制难度,可以实现采摘通道精确对准水果的功能,提高了果实采摘率。
44.本实用新型通过吸力装置和采摘通道的配合,完成果实采摘,保护果实表皮不受损伤,从而避免了现有技术中机械爪抓取果实时对果实的损害。
45.本实用新型结构稳定,成本低,灵活性好。
46.上面结合附图对本实用新型进行了示例性的描述,显然本实用新型的实现并不受
上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1