步行式中耕机的制作方法
1.本发明涉及步行式中耕机的引导部件以及车轮的结构。
背景技术:
2.作为步行式中耕机,具有专利文献1所公开的一种步行式中耕机。
3.在专利文献1中,将来自旋耕装置的土向左右两外侧引导的引导部件配置在旋耕装置的后侧,在前后方向上可移动地支承在机体。车轮配置在引导部件的后侧,设有使车轮在前后方向上可移动地支承在机体的车轮支承部件,引导部件与车轮支承部件一体地、在前后方向上可移动地构成。
4.在进行起垄作业和培土作业的情况下,操作人员使引导部件与车轮支承部件向后侧移动并固定在机体。当在该状态下驱动旋耕装置并使机体前行时,来自旋耕装置的土由引导部件向左右两外侧引导。
5.在使步行式中耕机移动的情况下,操作人员在使旋耕装置停止的状态下,使引导部件与车轮支承部件向前侧移动并固定在机体。在该状态下,操作人员通过把持操纵手柄并进行下压,能够使车轮接地并将提升旋耕装置,从而能够在路上等进行移动。
6.现有技术文献
7.专利文献
8.专利文献1:日本国专利第5760344号公报
技术实现要素:
9.发明所要解决的技术问题
10.在专利文献1中,在进行起垄作业和培土作业的情况下,操作人员需要手动使引导部件与车轮支承部件向后侧移动,并由连结部件等固定在机体。
11.同样地,在使步行式中耕机移动的情况下,操作人员需要手动使引导部件与车轮支承部件向前侧移动,并由连结部件等固定在机体,所以在作业性方面具有改进的空间。
12.本发明的目的在于,在步行式中耕机中,提高引导部件与车轮支承部件在前后方向上进行移动操作时的作业性。
13.用于解决技术问题的技术方案
14.本发明的步行式中耕机具有:支承在机体的动力部、从所述机体向后侧延伸地支承在所述机体的操纵手柄、相对于所述动力部而位于下侧地支承在所述机体并利用所述动力部的动力进行驱动的旋耕装置、在侧视中相对于所述旋耕装置而配置在后侧并在前后方向上可移动地支承在所述机体且将来自所述旋耕装置的土向左右两外侧引导的引导部件、在侧视中相对于所述引导部件而配置在后侧的车轮、使所述车轮在前后方向上可移动地支承在所述机体的车轮支承部件、以及将所述引导部件与所述车轮支承部件一体地向前侧施力的施力机构,所述引导部件与所述车轮支承部件由所述施力机构而能够向与所述旋耕装置接近的前侧移动,并且由来自所述旋耕装置的土的作用而能够与所述施力机构对抗,向
远离所述旋耕装置的后侧移动。
15.根据本发明,在进行起垄作业和培土作业的情况下,当对旋耕装置进行驱动并使机体前行时,由引导部件将来自旋耕装置的土向左右两外侧引导。
16.与此同时,由来自旋耕装置的土的作用,将引导部件向后侧推压,使引导部件与车轮支承部件一体地对抗施力机构而向远离旋耕装置的后侧移动,引导部件通过来自旋耕装置的土的引导,被配置在适当的位置。
17.根据本发明,在使步行式中耕机移动的情况下,当由对旋耕装置停止操作等而使来自旋耕装置的土的作用消失时,引导部件与车轮支承部件一体地由施力机构向与旋耕装置接近的前侧移动。
18.在车轮支承部件向前侧移动、车轮与旋耕装置接近的状态下,操作人员通过把持操纵手柄并进行下压,能够使车轮接地,并且相对轻松地提升旋耕装置,从而能够在路上等进行移动。
19.如上所述,根据本发明,根据有无来自旋耕装置的土的作用,引导部件与车轮支承部件在前后方向上移动,操作人员不需要手动使引导部件与车轮支承部件在前后方向上移动并由连结部件等固定在机体,步行式中耕机的作业性提高。
20.在本发明中,优选具有联动机构,其在整个所述引导部件与所述车轮支承部件进行设置,使所述引导部件与所述车轮支承部件一体地在前后方向上移动。
21.根据本发明,引导部件与车轮支承部件能够通过联动机构,稳定并一体地在前后方向上移动。
22.在本发明中,优选所述施力机构将所述车轮支承部件向前侧施力,在所述联动机构设有:安装在所述引导部件与所述车轮支承部件之中的一方并向所述引导部件与所述车轮支承部件之中的另一方延伸的联动部件、以及安装在所述引导部件与所述车轮支承部件之中的另一方并面对所述联动部件的受压面部,由来自所述旋耕装置的土的作用而使所述引导部件向后侧的移动通过所述联动部件与所述受压面部的接触,向所述车轮支承部件传递,与所述施力机构对抗,所述车轮支承部件能够向后侧移动,由所述施力机构而使所述车轮支承部件向前侧的移动通过所述联动部件与所述受压面部的接触,向所述引导部件传递,所述引导部件能够向前侧移动。
23.根据本发明,因为施力机构构成为将车轮支承部件向前侧施力,所以,施力机构能够小规模地构成,在简化结构方面是有利的。
24.如上所述,在施力机构构成为将车轮支承部件向前侧施力的情况下,根据本发明,在联动机构设有安装在引导部件与车轮支承部件之中的一方并向引导部件与车轮支承部件之中的另一方延伸的联动部件,并设有安装在引导部件与车轮支承部件之中的另一方并面对联动部件的受压面部。
25.由此,当引导部件由来自旋耕装置的土的作用而向后侧移动时,通过联动部件与受压面部的接触,引导部件向后侧的移动被传递给车轮支承部件,车轮支承部件向后侧移动。当车轮支承部件由施力机构而向前侧移动时,通过联动部件与受压面部的接触,车轮支承部件向前侧的移动被传递给引导部件,引导部件向前侧移动。
26.如上所述,根据本发明,在施力机构构成为将车轮支承部件向前侧施力的情况下,由于联动机构,引导部件与车轮支承部件能够毫无困难地在前后方向上移动。
27.在本发明中,优选所述引导部件及所述车轮支承部件通过围绕沿着所述机体的左右方向的轴芯可摆动地进行支承,能够在前后方向上移动。
28.根据本发明,因为引导部件及车轮支承部件通过围绕沿着机体的左右方向的轴芯摆动而在前后方向上移动,所以引导部件及车轮支承部件能够顺畅地在前后方向上移动。
29.在本发明中,优选所述引导部件与所述车轮支承部件通过由单独的支轴、围绕沿着所述机体的左右方向的轴芯可摆动地进行支承,能够在前后方向上移动。
30.根据本发明,因为引导部件与车轮支承部件通过围绕沿着机体的左右方向的轴芯的摆动而在前后方向上移动,所以,引导部件与车轮支承部件能够顺畅地在前后方向上移动。
31.在该情况下,引导部件与车轮支承部件通过由单独的支轴、围绕沿着机体的左右方向的轴芯可摆动地进行支承,引导部件对车轮支承部件的摆动的影响、或车轮支承部件对引导部件的摆动的影响减少,所以在这一点上,引导部件与车轮支承部件也能够顺畅地在前后方向上移动。
32.在本发明中,优选所述施力机构为螺旋弹簧,使所述车轮支承部件的轴芯通过所述螺旋弹簧的内部而配置所述螺旋弹簧。
33.根据本发明,因为施力机构为螺旋弹簧,不是通过螺旋弹簧的伸缩、而是通过螺旋弹簧的扭曲来产生作用力,所以,螺旋弹簧不容易产生间隙,土不容易嵌入螺旋弹簧中。
34.在本发明中,优选当所述车轮位于前后移动的最前位置时,相对于在侧视中通过所述旋耕装置及所述车轮接地状态下的所述车轮支承部件的轴芯的铅垂线,所述最前位置的所述车轮的接地位置位于前侧。
35.根据本发明,当车轮位于前后移动的最前位置时,相对于在侧视中通过旋耕装置及车轮接地状态下的轴芯的铅垂线,最前位置的车轮的接地位置位于前侧,车轮与旋耕装置接近。
36.如上所述,在车轮位于最前位置的情况下,车轮支承部件成为在侧视中车轮支承部件的上端部位于比车轮支承部件的下端部更靠近后侧的后倾姿势。当在该状态下操作人员把持操纵手柄的后端部并下压来试图提升旋耕装置时,步行式中耕机的大致整个重量施加在车轮及车轮支承部件。此时,因为产生以车轮支承部件的支轴为支点向后方的力矩,所以能够轻松地进行提升旋耕装置的操作。
37.另外,与最前位置的车轮的接地位置至机体的前端部的长度相比,最前位置的车轮的接地位置至操纵手柄的后端部的长度足够长,所以能够轻松地进行提升旋耕装置并使之移动的操作。
38.在本发明中,优选当所述车轮位于前后移动的最后位置时,所述引导部件成为在侧视中所述引导部件的上端部相对于所述引导部件的下端部而位于前侧的前倾姿势。
39.根据本发明,由来自旋耕装置的土的作用,引导部件被向后侧推压,当引导部件向后侧移动直至车轮移动至前后移动的最后位置时,引导部件成为前倾姿势。
40.利用前倾姿势的引导部件,容易将来自旋耕装置的土向左右两外侧及下侧引导,能够稳定地进行起垄和培土。
附图说明
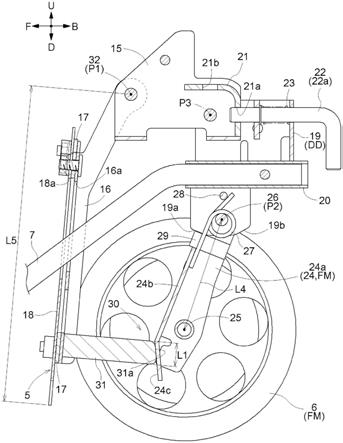
41.图1是在移动时支承托架固定在下降位置、且车轮支承部件及车轮位于最前位置的状态下的步行式中耕机的左侧视图。
42.图2是在起垄作业及培土作业中支承托架固定在下降位置、且车轮支承部件及车轮位于最后位置的状态下的步行式中耕机的左侧视图。
43.图3是在耕地作业中支承托架固定在上升位置的状态下的步行式中耕机的左侧视图。
44.图4是在耕地作业中支承托架固定在上升位置的状态下的步行式中耕机的俯视图。
45.图5是表示支承托架固定在下降位置、且车轮支承部件及车轮位于最前位置的状态的引导部件及车轮支承部件的附近的左侧视图。
46.图6是表示支承托架固定在下降位置、且车轮支承部件及车轮位于最后位置的状态的引导部件及车轮支承部件的附近的左侧视图。
47.图7是表示支承托架固定在上升位置的状态的引导部件及车轮支承部件的附近的左侧视图。
48.图8是表示支承托架固定在下降位置、且车轮支承部件及车轮位于最前位置的状态的引导部件及车轮支承部件的附近的立体图。
49.图9是表示支承托架固定在下降位置、且车轮支承部件及车轮位于最前位置的状态的引导部件及车轮支承部件的附近的立体图。
具体实施方式
50.图1~图9表示步行式中耕机,在图1~图9中,f表示前方,b表示后方,u表示上方,d表示下方,r表示右方向,l表示左方向。
51.(步行式中耕机的整体结构)
52.如图1及图4所示,在传动箱1(相当于机体)的上部支承有发动机2(相当于动力部),旋耕装置3相对于发动机2位于下侧地支承在传动箱1,操纵手柄4、引导部件5、车轮6及阻力部件7支承在传动箱1的后部,构成步行式中耕机。
53.支承框架8与传动箱1的前部连结,且向前侧延伸,发动机2支承在支承框架8,发动机2经由支承框架8而支承在传动箱1。
54.左右耕轴9从传动箱1的下部向右侧及左侧延伸,耕爪10与耕轴9连结,罩体11位于耕轴9及耕爪10的上侧地与传动箱1连结。
55.如上所述,旋耕装置3具有耕轴9、耕爪10、以及罩体11等。
56.发动机2的动力经由传动带12,向传动箱1的上部的输入轴13传递,并经由传动箱1的内部的传动机构(未图示),向耕轴9传递,从而在图1的逆时针方向上旋转驱动耕轴9。
57.通过旋转驱动耕轴9,由耕爪10进行耕地,进行后面叙述的(起垄作业及培土作业)、(耕地作业)所述的作业。
58.(操纵手柄及引导部件的结构)
59.如图1及图4所示,支承托架14与传动箱1的后部连结,操纵手柄4的基部安装在支承托架14。操纵手柄4经由支承托架14而支承在传动箱1,从传动箱1向后侧延伸。
60.如图1、图4、图5所示,在支承托架14连结有支承托架15,引导部件5安装在支承托架15。如图4、图5、图8、图9所示,引导部件5具有支承臂16、支承板17、以及引导板18等。
61.支承臂16是将板材折曲为槽状而形成的,在中央部开口有纵长的开口部16a。支轴32在左右方向上安装于支承托架15,支承臂16的上部在支轴32可摆动地进行支承,围绕沿着支承托架15的左右方向的轴芯p1在前后方向上可摆动地进行支承。
62.比较长的支承板17沿左右方向与支承臂16的上部连结,比较短的支承板17沿左右方向与支承臂16的下部连结。引导板18为由硬橡胶形成的平板状,在前视中形成为倒梯形状,被螺栓连结在支承板17。在引导板18上,纵长的开口部18a在与支承臂16的开口部16a对置的位置开口。
63.如上所述,引导部件5经由支承托架14、15而支承在传动箱1,在侧视中相对于旋耕装置3而配置在后侧。
64.引导部件5围绕沿着传动箱1(支承托架14、15)的左右方向的轴芯p1可摆动地进行支承,在前后方向上可移动地支承在传动箱1(支承托架14、15)。
65.(阻力部件的结构)
66.如图1、图4、图5、图8、图9所示,板材被折曲而形成的支承托架19在侧视中相对于引导部件5而配置在后侧。支承托架19在整个上升位置uu(参照图3及图7)及下降位置dd,围绕沿着支承托架15的左右方向的轴芯p3,在上下方向上可摆动地进行支承。
67.管部件20与支承托架19连结。由圆杆材料形成的阻力部件7的上部插入并连结在管部件20,阻力部件7通过支承臂16及引导板18的开口部16a、18a进行延伸。
68.如图5、图8、图9所示,角状的定位部件21与支承托架15连结,与上升位置uu及下降位置dd对应的固定孔21a、21b在定位部件21开口。
69.圆杆材料被弯曲为角状的固定部件22可滑动地安装在支承托架19,设有将固定部件22向定位部件21侧施力的弹簧23。
70.图5、图8、图9所示的状态是支承托架19被操作至下降位置dd、固定部件22插入定位部件21的固定孔21a中、且支承托架19被固定在下降位置dd的状态。
71.操作人员通过把持固定部件22的把手部22a、并将固定部件22从定位部件21的固定孔21a拔出,能够把持固定部件22的把手部22a并将支承托架19从下降位置dd操作至图3及图7所示的上升位置uu。之后,通过将固定部件22插入定位部件21的固定孔21b中,支承托架19被固定在上升位置uu。
72.在支承托架19被固定在上升位置uu的状态下,操作人员通过把持固定部件22的把手部22a,将固定部件22从定位部件21的固定孔21b拔出,能够将支承托架19从上升位置uu操作至下降位置dd,并被固定在下降位置dd。
73.(车轮及车轮支承部件的结构)
74.如图5、图8、图9所示,设有将板材折曲为槽状而形成的车轮支承部件24。在车轮支承部件24设有左右横侧部24a、跨越左右横侧部24a而连接的平板状的受压面部24b、以及从受压面部24b向下侧延伸的平板状的受压面部24c。
75.圆管状的车轴部25跨越车轮支承部件24的左右横侧部24a的下部而连结,向右侧及左侧延伸,左右车轮6在车轴部25的右部及左部可自由旋转地进行支承。
76.支轴26在左右方向上安装在支承托架19的下部。车轮支承部件24的上部在支轴26
上可摆动地进行支承,车轮支承部件24围绕沿着支承托架19的左右方向的轴芯p2,在前后方向上可摆动地进行支承。
77.如图5所示,在支承托架19被固定在下降位置dd的状态下,在侧视中,支轴32(轴芯p1)相对于支轴26(轴芯p2)而配置在前侧,相对于支轴26(轴芯p2)而配置在上侧。
78.如上所述,车轮支承部件24围绕沿着传动箱1(支承托架14、15、19)的左右方向的轴芯p2,可摆动地进行支承,在支承托架19被固定在下降位置dd的状态下,车轮支承部件24在前后方向上可移动地支承在传动箱1(支承托架14、15、19)。
79.通过车轮支承部件24经由支承托架14、15、19而支承在传动箱1,在支承托架19被固定在下降位置dd的状态下,车轮6在侧视中相对于引导部件5而配置在后侧,在前后方向上可移动地支承在传动箱1。
80.(将车轮支承部件向前侧施力的结构)
81.如图5、图8、图9所示,将螺旋弹簧27(相当于施力机构)卷绕在支轴26而安装,成为支轴26(轴芯p2)通过螺旋弹簧27内部的状态。
82.螺旋弹簧27的下侧的端部挂靠在车轮支承部件24的受压面部24b,螺旋弹簧27的上侧的端部挂靠在安装于支承托架19的销28,由螺旋弹簧27将车轮支承部件24向前侧施力。
83.止动部件29连结在车轮支承部件24的左右横侧部24a的内表面。支承托架19的下部的前部及后部倾斜地形成,前止动部19a及后止动部19b设置在支承托架19。
84.图5、图8、图9所示的状态是车轮支承部件24及车轮6由于螺旋弹簧27而向前侧移动、位于前后移动的最前位置fm的状态,止动部件29的前部从下侧与支承托架19的前止动部19a对抵,由此,车轮支承部件24及车轮6被阻滞在最前位置fm。
85.如图6所示,车轮支承部件24及车轮6从最前位置fm与螺旋弹簧27对抗而向后侧移动,止动部件29的后部从下侧与支承托架19的后止动部19b对抵,由此,车轮支承部件24及车轮6被阻滞在前后移动的最后位置bm。
86.(联动机构的结构)
87.如图5及图6所示,使引导部件5与车轮支承部件24一体地在前后方向上移动的联动机构30跨越引导部件5与车轮支承部件24而进行设置。联动机构30具有车轮支承部件24的受压面部24b、24c(参照所述的(车轮及车轮支承部件的结构))、以及联动部件31等。
88.联动部件31为细长的平板状,在支承臂16的开口部16a的下侧部分进行安装,从支承臂16通过左右车轮6之间,向车轮支承部件24延伸。联动部件31的端部31a形成为,侧视中在与联动部件31的长度方向(延伸方向)大致正交的方向上具有规定的长度l1。
89.车轮支承部件24的受压面部24b、24c面对联动部件31地设置在车轮支承部件24,车轮支承部件24的受压面部24c从车轮支承部件24的受压面部24b稍微向后侧的斜下侧延伸。
90.(引导部件与车轮支承部件向后侧的移动状态)
91.图5所示的状态是在支承托架19被固定在下降位置dd的状态下、车轮支承部件24由于螺旋弹簧27而移动至最前位置fm的状态,并且是联动部件31的端部31a与车轮支承部件24的受压面部24c接触的状态。
92.在该状态下,联动部件31与车轮支承部件24的受压面部24c在侧视中以接近直角
的状态进行交叉,联动部件31的端部31a的长度l1的大致整个范围成为与车轮支承部件24的受压面部24c接触的线接触状态。
93.如后面叙述的(起垄作业及培土作业)所述,如图5至图6所示,当由于来自旋耕装置3的土的作用、引导部件5向后侧移动时,通过联动部件31的端部31a与车轮支承部件24的受压面部24c接触,引导部件5向后侧的移动被传递给车轮支承部件24,车轮支承部件24与螺旋弹簧27对抗而从最前位置fm向后侧移动。
94.这样,引导部件5与车轮支承部件24通过联动机构30,与螺旋弹簧27对抗,向远离旋耕装置3的后侧移动。
95.如所述的(车轮及车轮支承部件的结构)所述,由于支轴32(轴芯p1)的位置与支轴26(轴芯p2)的位置不同,引导部件5的移动轨迹与车轮支承部件24的移动轨迹不同。
96.如图5至图6所示,当在该状态下引导部件5向后侧移动时,由于引导部件5的移动轨迹与车轮支承部件24的移动轨迹的差异,联动部件31的端部31a从车轮支承部件24的受压面部24c向上侧滑动地移动,引导部件5与车轮支承部件24的移动轨迹之差被吸收,并且将引导部件5向后侧的移动毫无困难地向车轮支承部件24传递。
97.如图6所示,当车轮支承部件24到达最后位置bm时,联动部件31的端部31a到达车轮支承部件24的受压面部24b。
98.在该状态下,联动部件31与车轮支承部件24的受压面部24b在侧视中以接近直角的状态下进行交叉,联动部件31的端部31a的长度l1的大致整个范围成为与车轮支承部件24的受压面部24b接触的线接触状态。
99.(引导部件与车轮支承部件向前侧的移动状态)
100.如步行式中耕机在路上等移动时,当来自旋耕装置3的土的作用消失时,车轮支承部件24由于螺旋弹簧27而向前侧移动。
101.如图6至图5所示,当车轮支承部件24由于螺旋弹簧27而从最后位置bm向前侧移动时,通过联动部件31的端部31a与车轮支承部件24的受压面部24b的接触,车轮支承部件24向前侧的移动被传递给引导部件5,引导部件5向前侧移动。
102.这样,引导部件5与车轮支承部件24由于螺旋弹簧27及联动机构30,向与旋耕装置3接近的前侧移动。换言之,车轮支承部件24被螺旋弹簧27向前侧施力,引导部件5经由车轮支承部件24与联动机构30,被螺旋弹簧27向前侧施力。
103.当车轮支承部件24向前侧移动时,由于引导部件5的移动轨迹与车轮支承部件24的移动轨迹的差异,与所述的(引导部件与车轮支承部件向后侧的移动状态)的说明相反,联动部件31的端部31a从车轮支承部件24的受压面部24b向下侧滑动地移动,引导部件5与车轮支承部件24的移动轨迹之差被吸收,并且车轮支承部件24向前侧的移动毫无困难地被传递给引导部件。当车轮支承部件24到达最前位置fm时,联动部件31的端部31a到达车轮支承部件24的受压面部24c。
104.如图5所示,在最前位置fm上,联动部件31与车轮支承部件24的受压面部24c在侧视中以接近直角的状态进行交叉。如图6所示,在最后位置bm上,联动部件31与车轮支承部件24的受压面部24b在侧视中以接近直角的状态进行交叉。
105.由此,即使在最前位置fm与最后位置bm之间的位置,联动部件31与车轮支承部件24的受压面部24b、24c也在侧视中以接近直角的状态进行交叉,由此,得到联动部件31的端
部31a的长度l1的较大范围与车轮支承部件24的受压面部24b、24c接触的线接触状态。
106.(步行式中耕机的移动)
107.如图1、图5、图8、图9所示,在路上等使步行式中耕机移动的情况下,操作人员在使旋耕装置3停止的状态下,将支承托架19操作并固定在下降位置dd,向前设定阻力部件7。
108.如所述的(引导部件与车轮支承部件向前侧的移动状态)所述,引导部件5与车轮支承部件24由于螺旋弹簧27及联动机构30而向与旋耕装置3接近的前侧移动,止动部件29与支承托架19的前止动部19a对抵,车轮支承部件24及车轮6被阻滞在最前位置fm。
109.当车轮支承部件24及车轮6位于最前位置fm时,相对于在侧视中通过旋耕装置3及车轮6接地状态下的车轮支承部件24的支轴26(轴芯p2)的铅垂线e1,最前位置fm的车轮6的接地位置s1位于前侧。车轮支承部件24成为在侧视中车轮支承部件24的上端部位于比车轮支承部件24的下端部更靠近后侧的后倾姿势。
110.由此,如图1所示,最前位置fm的车轮6的接地位置s1至操纵手柄4的后端部的长度l3比最前位置fm的车轮6的接地位置s1至步行式中耕机的前端部的长度l2长。
111.操作人员通过把持操纵手柄4的后端部的握把部4a并进行下压,能够轻松地提升旋耕装置3,能够把持操纵手柄4的后端部的握把部4a,并通过车轮6使步行式中耕机移动。
112.当旋耕装置3被提升时,步行式中耕机的大致整个重量施加于车轮6及车轮支承部件24,基于步行式中耕机的重量的弯矩施加于后倾姿势的车轮支承部件24。
113.如图5所示,车轮支承部件24的支轴26(轴芯p2)至车轮支承部件24的车轮6被支承的车轴部25的长度l4设定为比引导部件5的上端部(支轴32(轴芯p1))至下端部(引导板18的下端部)的长度l5短的长度,车轮支承部件24(长度l4)相对较短。
114.由此,即使基于步行式中耕机的重量的弯矩施加于车轮支承部件24,由于车轮支承部件24(长度l4)较短,也能够抑制弯矩,在提高车轮支承部件24的耐久性的方面是有利的。
115.(起垄作业及培土作业)
116.步行式中耕机在进行将来自旋耕装置3的土由引导部件5向左右两外侧引导而形成垄的起垄作业、以及在田地中形成的垄之间行驶并将来自旋耕装置3的土由引导部件5向左右两外侧引导来培土的培土作业的情况下,进行如下说明的作业。
117.如图2所示,在田地中,操作人员将支承托架19操作并固定在下降位置dd,向前设定阻力部件7,使旋耕装置3工作,并使步行式中耕机行驶。
118.从旋耕装置3向后侧翻起的土与引导部件5碰触、或引导部件5的下端部与因旋耕装置3耕地而隆起的土接触等来自旋耕装置3的土的作用施加于引导部件5。
119.如所述的(引导部件与车轮支承部件向后侧的移动状态)所述及图2、图6所示,由于来自旋耕装置3的土的作用,引导部件5向后侧移动,由于联动机构30,车轮支承部件24与螺旋弹簧27对抗而从最前位置fm向后侧移动,引导部件5与车轮支承部件24向远离旋耕装置3的后侧移动。
120.当车轮支承部件24到达最后位置bm时,通过止动部件29与支承托架19的后止动部19b对抵,车轮支承部件24及车轮6被阻滞在最后位置bm。
121.当车轮6位于最后位置bm时,引导部件5成为在侧视中引导部件5的上端部相对于引导部件5的下端部而位于前侧的前倾姿势。利用前倾姿势的引导部件5,容易将来自旋耕
装置3的土向左右两外侧及下侧引导,使起垄及及培土稳定地进行。
122.在所述的状态下,即使引导部件5试图进一步向后侧移动,也由于止动部件29与支承托架19的后止动部19b对抵而将车轮支承部件24阻滞在最后位置bm,引导部件5被阻滞。
123.在由于来自旋耕装置3的土的作用而引导部件5向后侧移动的状态下,在来自旋耕装置3的土的作用较大的情况下,引导部件5向后侧移动直至如上所述车轮支承部件24到达最后位置bm。
124.在来自旋耕装置3的土的作用较小的情况下,有时会出现引导部件5在车轮支承部件24到达最后位置bm之前就不向后侧移动的状态,在该状态下,引导部件5与车轮支承部件24在最后位置bm被阻滞的状态下的引导部件5的前倾姿势相比,为稍微接近于直立的姿势。
125.如上所述,来自旋耕装置3的土的作用越大,引导部件5与旋耕装置3之间的距离越长,引导部件5越接近前倾姿势。来自旋耕装置3的土的作用越小,引导部件5与旋耕装置3之间的距离越短,引导部件5越接近直立姿势。
126.(耕地作业)
127.在步行式中耕机进行田地的耕地作业的情况下,进行如下说明的作业。
128.如图3、图4、图7所示,操作人员将支承托架19操作并固定在上升位置uu,向下设定阻力部件7。当支承托架19被操作至上升位置uu时,通过将阻力部件7插入支承臂16的开口部16a,能够利用阻力部件7提升引导部件5。
129.通过使旋耕装置3工作,使步行式中耕机行驶,能够利用阻力部件7抑制步行式中耕机前行,并且由旋耕装置3进行田地的耕地。
130.(发明的第一其它实施方式)
131.在联动机构30中,也可以构成为联动部件31安装在车轮支承部件24并向引导部件5延伸,受压面部24b、24c安装在引导部件5并面对联动部件31。
132.(发明的第二其它实施方式)
133.联动机构30也可以不构成为具有联动部件31与受压面部24b、24c的接触结构,而是构成为跨越引导部件5与车轮支承部件24而进行连结。
134.根据该结构,可以使施力机构对引导部件5向前侧施力而构成,也可以使施力机构对引导部件5与车轮支承部件24双方向前侧施力而构成。
135.(发明的第三其它实施方式)
136.引导部件5与车轮支承部件24也可以不是在不同的单独的支轴32(轴芯p1)及支轴26(轴芯p2)可摆动地进行支承,而是围绕相同的支轴(轴芯)可摆动地进行支承。根据该结构,容易实施所述的(发明的第二其它实施方式)。
137.在该结构中,也可以构成为,在车轮6位于最前位置fm时,相对于在侧视中通过旋耕装置3及车轮6接地状态下的所述的相同的支轴(轴芯)的铅垂线e1,使最前位置fm的车轮6的接地位置s1位于前侧。
138.如上所述,在引导部件5与车轮支承部件24围绕相同的支轴(轴芯)可摆动地进行支承的情况下,也可以构成为在围绕一个支轴(轴芯)、于前后方向上可摆动地进行支承的支承部件(未图示)上支承有引导部件5的支承板17、引导板18以及车轮6,支承部件被施力机构向前侧施力。
139.根据上述结构,支承部件具有引导部件5的支承臂16的功能、车轮支承部件24的功
能、以及联动机构30的功能。
140.(发明的第四其它实施方式)
141.引导部件5与车轮支承部件24也可以沿前后方向可滑行移动地进行支承,而非可摆动地进行支承。
142.作为动力部,也可以替代发动机2而设有电动马达(未图示)。
143.工业实用性
144.本发明可以应用在田地进行起垄作业和培土作业等的步行式中耕机中。
145.附图标记说明
146.1传动箱(机体);2发动机(动力部);3旋耕装置;4操纵手柄;5引导部件;6车轮;24车轮支承部件;24b受压面部;24c受压面部;26支轴;27螺旋弹簧(施力机构);30联动机构;31联动部件;32支轴;e1铅垂线;fm最前位置;bm最后位置;l4长度;l5长度;p1轴芯;p2轴芯;s1接地位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1