基于割草机位置对割草机平台的切割高度的动态调节的制作方法
基于割草机位置对割草机平台的切割高度的动态调节
背景技术:
1.高尔夫球场和其他草场包括以不同高度切割的草地片区。例如,高尔夫球场上的典型的球洞包括球道和环绕球道的长草区,长草区通常保持在比球道高得多的高度。在许多情况下,长草区可以包括多个片区,这些片区的高度是逐步增加的。
2.图1提供了草场的示例(在这种情况下是高尔夫球洞100),该草场包括各自以不同高度切割的草地片区。球洞100包括球道101,环绕球道101的第一切割长草区102,以及环绕第一切割长草区102的第二切割长草区103。这些片区中草的高度因为草的类型(例如,百慕大草与蓝草)、位置(例如,佛罗里达州与明尼苏达州)、一年中的时间而有所不同。仅作为示例,球道101可以按0.35英寸到0.625英寸之间的高度切割,第一切割长草区102可以按1.0英寸到1.75英寸之间的高度切割,第二切割长草区103可以按2.0英寸到6.0英寸之间的高度切割。
3.为了建造这些不同草高的独立片区,通常使用多台割草机。例如,高尔夫球场可以具有第一割草机,该第一割草机带有设置为0.5英寸的高度以用于切割球道101的(多个)割草机平台,第二割草机带有设置为1英寸的高度以用于切割第一切割长草区102的(多个)割草机平台,以及第三割草机带有设置为2英寸的高度以用于切割第二切割长草区103的(多个)割草机平台。许多高尔夫球场没有资源以拥有和维护用于许多草地片区的割草机。这些高尔夫球场因而可能会选择仅提供球道和单个切割长草区。
4.替代地,高尔夫球场可以具有单个割草机,它用来切割所有片区或至少多个片区。在此情况下,将有必要在切割每个片区之前调节(多个)割草机平台的高度。这可能一个繁琐的过程。也很难始终如一地设定割草机平台的高度。出于这些原因,高尔夫球场可能会再次选择仅提供球道和单个切割长草区。简而言之,因为切割多个片区的长草区难度较大并且成本较高,所以许多高尔夫球场都不这样做。那些这样做的高尔夫球场面临着拥有多台割草机的附加成本和/或调节切割高度难度的增加。
技术实现要素:
5.本发明延伸到一种割草机以及用于基于割草机的位置来动态地调节割草机平台的切割高度的方法。当割草机在待切割的草地区域上行进时,控制系统可以跟踪割草机上的每个割草机平台的当前位置。控制系统可以将割草机平台的当前位置与定义在该区域之内的一个或多个片区的边界进行比较,从而确定割草机平台处于哪个片区之内。当控制系统检测到割草机平台已经跨过或将跨过一片区时,它可以识别分配给该片区的特定切割高度,并且动态地将割草机平台的切割高度调节到特定切割高度。当割草机包括一个以上的割草机平台时,控制系统可以被配置为基于其位置来独立地调节每个割草机平台的切割高度。
6.在一些实施例中,本发明可以被实施为具有第一割草机平台的割草机,该割草机平台包括至少一个致动器和由至少一个致动器驱动的至少一个高度调节机构。至少一个高度调节机构控制第一割草机平台的切割高度。割草机还可以包括一个或多个提供当前位置
值的位置传感器和一个控制系统,该控制系统联接到一个或多个位置传感器和第一割草机平台的至少一个致动器。控制系统被配置为在割草机在待切割的草地区域之内行进时执行用于动态地调节第一割草机平台的切割高度的方法。该方法包括:监控由一个或多个传感器提供的当前位置值;从当前位置值中确定第一割草机平台的当前位置;检测第一割草机平台的当前位置处于区域的第一片区之内;识别分配给第一片区的第一切割高度;以及向第一割草机平台的至少一个致动器提供一个或多个切割高度控制信号,该一个或多个切割高度控制信号使至少一个致动器来驱动至少一个高度调节机构,从而将第一割草机平台的切割高度设定为第一切割高度。
7.在其他实施例中,本发明被具有一个或多个割草机平台的割草机的控制系统实施为用于在割草机在待切割的草地区域之内行进时动态地调节一个或多个割草机平台的切割高度的方法。控制系统可以从割草机上的一个或多个传感器接收当前位置值,并且从当前位置值中确定一个或多个割草机平台的第一割草机平台的当前位置。控制系统还可以检测第一割草机平台的当前位置处于该区域的第一片区之内,并且识别分配给第一片区的第一切割高度。然后,控制系统可以向第一割草机平台上的至少一个执行器提供一个或多个切割高度控制信号。一个或多个切割高度控制信号使至少一个致动器来驱动第一割草机平台上的至少一个高度调节机构,从而将第一割草机平台的切割高度设定为第一切割高度。
8.在其他实施例中,本发明被具有至少第一割草机平台和第二割草机平台的割草机的控制系统实施为用于在割草机在待切割的草地区域之内行进时动态地调节第一割草机平台和第二割草机平台的切割高度的方法。控制系统可以从割草机上的一个或多个位置传感器接收当前位置值,并且从当前位置值中确定第一割草机平台的当前位置和第二割草机平台的当前位置。控制系统还可以检测第一割草机平台的当前位置处于该区域的第一片区之内,并且第二割草机平台的当前位置处于该区域的第二片区之内。控制系统可以进一步识别分配给第一片区的第一切割高度。然后,控制系统向第一割草机平台上的至少一个致动器提供一个或多个第一切割高度控制信号。一个或多个第一切割高度控制信号使第一割草机平台上的至少一个致动器来驱动第一割草机平台上的至少一个高度调节机构,从而将第一割草机平台的切割高度设定为第一切割高度。
9.该概述被提供以简化形式介绍下文将在具体实施方式中进一步描述的概念的选择。该发明内容不旨在标识所要求保护的主题的关键特征或必要特征。
附图说明
10.为了描述可以获得本发明的上文列举的和其他优点及特征的方式,将通过参考附图中示出的本发明的特定实施例来呈现上文简要描述的本发明的更具体的描述。应当理解,这些图仅描绘了本发明的典型实施例,并且因而不应被认为是其范围的限制,通过使用附图,本发明将以附加的特征和细节来描述和解释,在附图中:
11.图1示出了草场的示例,该草场具有被切割为不同高度的片区;
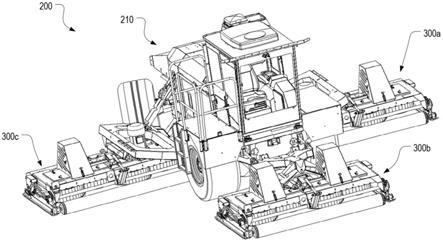
12.图2示出了可以被用来实施本发明实施例的割草机的示例;
13.图3示出了图2割草机的割草机平台;
14.图4和图4a各自提供了可以实施本发明实施例的割草机的控制系统的框图;
15.图5示出了可以被配置为实施本发明实施例的割草机的控制系统的控制模块;
16.图6a至图6c提供了如何基于割草机的位置来动态地调节割草机平台的切割高度的示例;
17.图7a和图7b提供了同一割草机上的多个割草机平台的切割高度如何被单独调节的示例;以及
18.图8提供了如何基于割草机的位置来动态地调节割草机平台的切割高度的另一示例。
具体实施方式
19.在本说明书和权利要求书中,术语“割草机”应该被解释为可以在地面上推进并且能够割草的设备。本领域技术人员将会理解,有许多不同类型和配置的割草机。因此,尽管以下描述将采用拖拉机形式割草机支持若干割草机平台的示例,但应该理解,任何类型的割草机都可以被配置为实施本发明的实施例。术语“割草机平台”应该被解释为割草机的组件,其容纳一个或多个切割刀片。被配置为实施本发明的实施例的割草机可以包括一个或多个割草机平台。术语“动力装置”应该被解释为割草机的组件,其使割草机以地面速度行进。因此,割草机的动力装置可以包括发动机、变速器、(多个)电动机和/或其他组件。
20.图2提供了可以被配置为实施本发明实施例的割草机200的示例。如所示出的,割草机200被配置作为具有动力装置210的拖拉机,该动力装置向多个割草机平台300a-300c(或统称为300)的每个割草机平台以及向割草机的传动系统提供动力。换句话说,动力装置210提供动力以在地面上推进割草机200,并且向每个割草机平台300上使切割刀片旋转的一个或多个电动机供应动力。可以使用任何传动系统配置,并且特定类型的传动系统对本发明来说不是必需的。在一些情况下,并且与所描绘的实施例相反,传动系统可以联接到轮子或辊,该轮子或辊形成割草机平台300的一部分。
21.图3示出了可以用在割草机200上的示例割草机平台300的独立视图。割草机平台300容纳了若干切割刀片,在所描绘的示例中为四个切割刀片,并且包括两个用于驱动切割刀片的电动机302。在该示例中,每个电动机302独立地驱动两个切割刀片。当然,割草机平台可以包括驱动任何合理数量的切割刀片(包括单个切割刀片)的单个电动机或两个以上的电动机。割草机平台300还包括前辊和后辊,它们经由联动装置301联接在一起,该联动装置在
‘
065申请中有详细描述。在一些实施例中,辊可以用轮子代替(例如,轮子在割草机平台的每个角落处)。联动装置301允许割草机平台300相对于地面的高度可以用单个动作均匀地来调节,这在
‘
065申请中也有描述。
22.割草机200可以包括控制系统,该控制系统一般被配置为监控和修改割草机的操作参数。图4和图4a中提供了表示该控制系统的框图。如所示出的,割草机200可以包括控制模块220,并且割草机平台300a-300c的每个割草机平台可以包括一个或多个致动器405和一个或多个高度调节机构410,它们被配置为调节割草机平台的切割高度。控制模块220可以表示任何合适类型的电路,包括一个或多个处理器、微控制器、fpga、asic、plc等。
23.一个或多个位置传感器230(例如,gps传感器或埋入的周界线传感器)可以位于割草机200上并且联接到控制模块220,从而向控制模块220提供表示割草机200的当前位置的当前位置值。图4表示采用了一个或多个集中式位置传感器230的实施例(例如,割草机200的驾驶室上的gps传感器)。图4a表示每个割草机平台300可以包括一个或多个位置传感器
230的实施例。在此类实施例中,控制模块220可以接收针对由三个单独的箭头表示的每个割草机平台的当前位置值。这些当前位置值可以定义割草机和/或(多个)割草机平台在任何特定时间的绝对或相对位置。例如,当前位置值可以是定义割草机或割草机平台的经纬度的gps坐标,也可以是定义(多个)位置传感器与埋入的周界线之间的距离。
24.每个致动器405可以表示各种类型的致动器中的任何一种,包括线性和旋转致动器。致动器405还可以被电动地、机械地、液压地、气动地等被驱动。简而言之,致动器405表示割草机平台300上的(多个)组件,其被配置为接收来自控制模块220的控制信号,并且作为响应,向(多个)高度调节机构410施加力或以其他方式驱动它,以使割草机平台300的切割高度被调节。适合的致动器405的具体但非限制性的示例包括
‘
065申请中的致动器107以及
‘
942申请中的致动器403、413和电动机506、516。值得注意的是,割草机平台300可以包括用于驱动一个或多个高度调节机构410的单个致动器405或用于驱动一个或多个高度调节机构410的多个致动器405。相应地,图4和图4a仅仅提供了割草机平台300上的致动器405和高度调节机构410的许多可能布置的一个示例。
25.高度调节机构410可以表示割草机平台300的(多个)组件,其使得割草机平台的切割高度能够被自动调节。如在
‘
065和
‘
942申请中更详细描述的,割草机平台可以通过滚动机构(例如,轮子或辊)支撑在地面之上。高度调节机构410可以表示将一个或多个滚动机构联接到割草机平台300的(多个)组件的至少一些组件,并且可以由(多个)致动器405驱动以调节(多个)滚动机构相对于割草机平台300的主体的垂直位置。
‘
065专利中描述了合适的高度调节机构410的一个具体但非限制性的示例,并且其包括轴103、支撑臂104、联接机构105和致动臂106,该制动臂可以由致动器107驱动以使辊102的垂直位置相对于割草机平台100的主体101被调节。其他示例在
‘
942申请中被描述为高度调节机构400、400a和500。
26.如图4和图4a中的箭头所表示的,为了调节割草机平台300的切割高度,控制模块220向执行器405输出一个或多个切割高度控制信号,该一个或多个切割高度控制信号表示针对相应的割草机平台300的期望切割高度。如下文所描述的,控制模块220可以向每个割草机平台300提供相同的切割高度控制信号(例如,当每个割草机平台300旨在被设定为相同切割高度时),或者可以向每个割草机平台300提供单独的切割高度控制信号(例如,当每个割草机平台300可以被设定为相对于其他割草机平台的不同高度时)。图4和图4a表示的实施例中,控制模块220被配置为向每个割草机平台300上的每个致动器405提供单独的切割高度控制信号,以便每个割草机平台300的切割高度可以被单独地控制。虽然未被示出,但在一些实施例中,每个致动器405可以向控制模块220提供反馈,该反馈标识了致动器的当前位置(并且因而表示割草机平台的当前切割高度)。在此情况下,控制模块220可以在生成切割高度控制信号时采用该反馈。
27.图4和4a还表示了致动器405向相应的割草机平台300上的每个高度调节机构410提供力,其中该力基于从控制模块220接收到的(多个)切割高度控制信号。例如,如果致动器405是电动线性致动器,则控制模块220可以提供切割高度控制信号,该切割高度控制信号定义了线性致动器的轴应该延伸或缩回多远(例如,通过定义内部电动机的旋转次数,通过提供经编码的位置,通过提供特定时间长度的特定电压,等)。作为响应,线性致动器将根据切割高度控制信号被驱动,从而施加力,以使每个高度调节机构410以必要的方式重新定位/定向,以改变高度调节机构支持的(多个)滚动机构的相对垂直位置。
28.图5提供了关于控制模块220的可能配置的更多细节。如所示出的,控制模块220可以包括、实施、连接到或以其他方式访问地图储存500,该地图储存可以存储一个或多个地图,诸如地图501a-501n。控制模块220还可以包括表示控制模块220的(多个)组件或(多个)部分的切割高度模块501,其被配置为基于从位置传感器230接收到的当前位置值和存储在地图储存500中的适用地图来生成切割高度控制信号。
29.地图501a-501n的每个地图可以涵盖特定区域,并且可以为在特定高度切割的草地片区内定义边界。例如,参考图1,地图可以定义球道101的边界、第一切割长草区102的边界和第二切割长草区103的边界。每个地图还可以为每个经定义的片区指定特定切割高度。例如,地图可以为球道101定义0.5英寸的切割高度,为第一切割长草区102定义1英寸的切割高度,以及为第二切割长草区103定义2英寸的切割高度。
30.地图501a-501n可以以任何合适的方式或格式来构造。例如,每个地图可以是keyhole公司开发的标记语言(kml)文件、gps交换格式(gpx)文件、geojson文件等形式。以下标记片段表示可以被用于图1的球洞100的基于kml的地图示例。如所示出的,每个片区都在包括linestring元素的placemark(地标)元素中定义,该linestring元素将片区的边界定义为一系列坐标(可以是绝对坐标或相对坐标),并且使用extendeddata(扩展数据)元素来将cutting height(切割高度)定义为自定义数据。
31.32.[0033][0034]
切割高度模块501可以采用其从(多个)位置传感器230接收的当前位置值来确定割草机平台300处于区域的哪个片区之内,并且识别分配给该片区的切割高度。切割高度模块501可以通过跟踪当前位置值(即,通过跟踪每个割草机平台300的位置)并且将其与任何适用地图中定义的一个或多个片区的边界进行比较来做到这一点。当切割高度模块501确定特定割草机平台300处于特定片区的边界之内时,它可以生成(多个)切割高度控制信号,以使特定割草机平台被设定为针对特定片区定义的切割高度。以这种方式,切割高度模块501可以基于割草机平台的位置来动态地调节割草机平台300的切割高度。
[0035]
在一些实施例中,为了正确地确定特定割草机平台300何时处于边界之内,切割高度模块501可以保持特定割草机平台相对于当前位置值的一个或多个偏移。例如,如果(多个)位置传感器230安装在割草机200的驾驶室顶部,则割草机平台300a和300c将相对于当前位置值分别向左边和右边偏移,而割草机平台300b将以当前位置值的前面偏移。切割高度模块501可以用此类偏移来编程,以便在基于当前位置值来计算每个割草机平台300是否处于片区之内时可以采用这些偏移。这些偏移可以优选地表示割草机平台300的一个或多个边缘的相对位置。
[0036]
在一些实施例中,切割高度模块501可以将每个割草机平台300建模为二维形状(例如,矩形),并且保持该形状相对于当前位置值的偏移。以这种方式,切割高度模块501可以采用当前位置值来跟踪该形状在该区域上的移动,并且将这种移动与在(多个)适用地图中定义的片区的边界进行比较。
[0037]
图6a至图6c表示了示例过程,通过该过程,切割高度模块501可以基于割草机的位置来动态地调节割草机平台300的切割高度。为了便于解释,该过程将在割草机位于包含球
洞100的区域之内的背景下进行描述。在该示例中,将假设割草机包括单个割草机平台300。还将假设割草机最初位于球道101之内,并且如图6a中还未移动。尽管该示例描述了使用特定步骤序列来动态地调节切割高度的过程,但在每个实施例中,该过程不需要以该序列执行步骤。
[0038]
在图6a中示出的步骤1a中,切割高度模块501最初可以读取其从(多个)位置传感器230接收的(多个)当前位置值,从而确定割草机平台300的位置。如上所提及的,如果有必要,切割高度模块501可以将已知的偏移应用于(多个)当前位置值,以精确地确定割草机平台300位于何处。例如,切割高度模块501可以采用已知的一个或多个偏移来确定割草机平台300的前边缘、后边缘、左边缘和/或右边缘的精确位置。
[0039]
在步骤1b中,该步骤可以或者可以不在步骤1a之后执行,切割高度模块501可以检索在地图内定义的任何片区的边界坐标,该地图适用于割草机平台300所在的当前区域。作为示例,切割高度模块501可以获得(多个)当前位置值,并且使用它们来标识和检索涵盖当前位置值落在其之内的区域的一个或多个地图。然后,切割高度模块501可以读取定义包括在(多个)适用地图中的任何片区的边界的坐标。替代地,在采用单个地图的实施例中,切割高度模块501可以简单地访问地图,并且读取定义包括在地图中的任何片区的边界的坐标。在其他实施例中,切割高度模块501可以被配置为基于用户输入来选择地图。例如,操作员或远程用户可以指定割草机处于球洞100上,并且作为响应,切割高度模块501可以选择与球洞100相关联的一个或多个地图。
[0040]
步骤1b还可以包括检索与每个片区相关的切割高度。替代地,切割高度模块501可以仅在标识割草机平台300处于哪个片区之内之后检索切割高度。简而言之,步骤1b涵盖标识适用于待切割区域的任何地图,并且从任何所标识的地图中获得为该区域定义的每个片区的边界,以及为每个片区定义的可能的切割高度。在该背景下,术语“地图”应该被解释为涵盖文件、文件的一部分或任何数据结构,其为待切割的草地区域之内的一个或多个片区定义了边界和切割高度。
[0041]
在本示例中,将假设切割高度模块501使用(多个)当前位置值来标识割草机平台300的当前位置处于地图501a所涵盖的区域之内。相应地,切割高度模块501可以检索或以其他方式访问定义了在地图501a中定义的每个片区的边界的坐标以及分配给这些片区的每个片区的切割高度。这些片区将包括球道101、第一切割长草区102和第二切割长草区103。
[0042]
在步骤1c中,切割高度模块501采用(多个)当前位置值和定义了待切割区域之内的片区的边界的所检索到的坐标,以确定割草机平台300处于哪个片区之内。考虑到片区可能具有嵌套式布置,切割高度模块501可以确定的是,当割草机平台300的当前位置落在片区的边界之内但在任何其他内部片区的边界之外时,割草机平台300处于该片区之内。例如,切割高度模块501可以确定的是,当割草机平台的当前位置处于第一切割长草区102的边界内侧(并且因而也在第二切割长草区103的边界之内)但在球道101的边界之外时,割草机平台处于第一切割长草区102之内。相应地,在待切割区域包括嵌套式布置的片区(例如,高尔夫球场)的实施例中,切割高度模块501可以将(多个)当前位置值与该区域内每个片区的边界进行比较,从而确定割草机平台处于哪个片区中。然而,在其他实施例中,区域可以被划分为不重叠的片区(例如,棒球场,其中内场以一个高度切割,并且外场以另一高度切
割)。在此类实施例中,切割高度模块501可以确定割草机平台处于特定片区之内,而不一定将(多个)当前位置值与该区域中的每个片区的边界进行比较。
[0043]
在一些实施例中,地图可以分层地布置片区,以便于确定割草机平台处于哪个片区之内。例如,地图501a可以定义球道101处于第一切割长草区102之内,并且第一切割长草区102处于第二切割长草区103之内。基于上述片段的以下标记片段标识了一个可以定义这种片区分层布置的方式。
[0044]
[0045][0046]
在该示例中,采用hierarchical position(分层位置)自定义数据元素以将定义每个片区的边界的坐标与定义该片区在层次结构中的顺序的数字或其他标识符相关联。例如,第二切割长草区103(即最外层的片区)对于其分层位置被分配了值1。第一切割长草区102对于其分层位置被分配了值2,以指示其边界处于第二切割长草区103的边界之内。同样地,球道101对于其分层位置被分配了值3,以指示其边界处于第一切割长草区102的边界之内和第二切割长草区103的边界之内。在这种情况下,如果切割高度模块501标识了割草机平台300的当前位置处于球道101的边界之内,则它可以基于球道101被分配了最高分层位置的事实来立即选择与球道101相关联的切割高度。切割高度模块501可以执行这种立即选择,即使它还没有将(多个)当前位置值与其他片区的边界进行比较。
[0047]
在步骤1d中,在标识了割草机平台300所处的片区以及分配给该片区的切割高度之后,切割高度模块501可以向割草机平台300上的(多个)致动器405输出一个或多个切割高度控制信号,以使割草机平台300的切割高度被设定为所分配的切割高度。例如,假设地图501a将0.5英寸的切割高度与球道101相关联,切割高度模块501可以输出切割高度控制信号,该切割高度控制信号将使致动器405来驱动高度调节机构410将切割高度提高或降低
到0.5英寸。
[0048]
转到图6b,假设割草机已经开始沿着球道101行进,其中割草机平台300的左边缘沿球道101的边界移动。这可以由手动操纵割草机的操作员来完成。替代地,如下文更详细描述的,割草机可以是自主的,在这种情况下,控制模块220可以沿着球道101的边界自动操纵割草机。在任一情况下,并且如步骤2a所表示的,切割高度模块501可以连续监控(多个)位置传感器230在割草机沿着球道101行进时输出的当前位置值流。
[0049]
在步骤2b中,切割高度模块501可以使用当前位置值来跟踪割草机平台300的当前位置,并且将当前位置与球道101的边界进行比较。例如,切割高度模块501可以采用任何已知的偏移来从当前位置值计算割草机平台300的左边缘的精确位置(或路径)。因为切割高度模块501已知割草机平台300处于球道101的边界之内,所以它可以重复地将割草机平台300的位置或路径与球道101的边界进行比较,以标识割草机平台300是否或何时跨过边界。在该示例中,假设割草机平台300保持在球道101的边界之内,并且因此,切割高度模块501将保持割草机平台300的切割高度(例如,通过不发送将使(多个)致动器405来调节(多个)高度调节机构410的切割高度控制信号)。
[0050]
在该示例中,假设切割高度模块501已知球道101是最内层的片区,并且因此,没有必要检测割草机平台300是否已经或将跨入内层片区。换句话说,切割高度模块501可以被配置为检测它何时处于最内层的片区之内,并且作为响应,可以将当前位置值与仅仅是最内层的片区的边界进行比较。然而,当切割高度模块501不处于最内内层的片区之内,或者不被配置为已知它何时处于最内内层的片区之内时,切割高度模块501可以将当前位置值与当前片区的边界、嵌套式片区的边界以及可能的该区域内的所有片区的边界进行比较。
[0051]
现转到图6c,假设割草机继续行进并且转向左边,从而使割草机平台300跨过球道101的边界进入第一切割长草区102。例如,操作员或控制模块220可以在完成球道101的修剪之后操纵割草机进入第一切割长草区102,以避开球道101中的障碍物,从而行进至另一球洞,等。
[0052]
如步骤3a和3b所表示的,切割高度模块501可以继续监控当前位置值流,并且使用它们来跟踪割草机平台300相对于球道101的边界的当前位置。作为这种连续监控和比较的结果,在步骤3c中,切割高度模块501将检测割草机平台300的当前位置越过球道101的边界并且进入第一切割长草区102。例如,当使用gps坐标时,切割高度模块501可以使用从位置传感器230接收到的gps坐标来跟踪割草机平台300的路径,并且将该路径与定义球道101的边界的gps坐标序列进行比较,从而确定该路径何时与该边界相交。
[0053]
响应于该检测,切割高度模块501可以识别、检索或以其他方式获得分配给第一切割长草区102的切割高度(例如,通过识别与定义割草机平台300现在所处的片区的边界的坐标相关联的切割高度)。在步骤3d中,切割高度模块501可以生成和输出一个或多个切割高度控制信号,该一个或多个切割高度控制信号将使割草机平台300上的(多个)致动器405适当地调节(多个)高度调节机构410。例如,切割高度模块501可以输出切割高度控制信号,该切割高度控制信号使(多个)致动器405将(多个)高度调节机构410重新定位为1英寸的切割高度。
[0054]
切割高度模块501可以执行这个相同的过程,以检测割草机平台300何时从一个片区行进到另一片区。例如,如果切割高度模块501检测到割草机平台300已经或将跨回球道
101(例如,通过检测割草机平台300的当前位置已经或将跨进由与球道101相关联的坐标定义的边界内侧),它可以生成切割高度控制信号以使割草机平台300的切割高度返回到0.5英寸。类似地,如果切割高度模块501检测到割草机平台300已经或将跨入第二切割长草区103(例如,通过检测割草机平台300的当前位置不再处于由与第一切割长草区102相关联的坐标定义的边界之内,而是处于由与第二切割长草区103相关联的坐标定义的边界之内),它可以生成切割高度控制信号以提高割草机平台300的切割高度,从而匹配相关联切割高度。
[0055]
在一些实施例中,切割高度模块501可以被配置为检测割草机平台300何时将跨过边界,并且可以预测性地生成和发送切割高度控制信号以调节切割高度。例如,作为步骤3a和3b的一部分,切割高度模块501可以确定割草机平台300的路径将使其跨入第一切割长草区102,并且可以预测性地提高切割高度,以便割草机平台300不会以较低高度切割第一切割长草区102的一部分。在一些实施例中,这可以通过采用阈值距离以引起切割高度的改变来实现。该阈值距离可以基于割草机的地面速度、当前位置值的精度、调节(多个)高度调节机构所要求的时间量、用户设定等。例如,假设(多个)致动器405需要1秒钟来调节割草机平台300的切割高度,切割高度模块501可以被配置为在计算出割草机平台300的路径将使其在1秒钟内跨过边界时发送切割高度控制信号来调节切割高度。以这种方式,切割高度模块501可以增加边界处的切割高度的精度。
[0056]
尽管图6a至图6c表示了割草机包括单个割草机平台的情况,但切割高度模块501可以在具有多个割草机平台的割草机中执行相同的过程,以基于割草机平台的位置来动态地调节割草机平台的切割高度。在一些实施例中,切割高度模块501可以被配置为跟踪每个割草机平台相对于边界的位置,并且每当任何割草机平台跨过边界时,动态地将所有割草机平台的切割高度调节到同一水平。然而,在其他实施例中,切割高度模块501可以独立地设定每个割草机平台的切割高度,以便基于割草机平台所处的特定片区来设定特定割草机平台的切割高度。
[0057]
图7a和图7b提供了切割高度模块501如何独立于同一割草机上任何其他割草机平台的切割高度来设定割草机平台的切割高度的示例。在图7a中,具有三个平台300a-300c的割草机被示出为在球道101之内行进。在割草机行进时,切割高度模块501可以执行上文描述的过程,以跟踪割草机平台300a-300c的每个割草机平台相对于球道101的边界(以及可能的该区域内的任何其他片区的边界)的位置或路径。这种跟踪可能需要使用相对于从(多个)位置传感器230接收到的当前位置值的一个或多个偏移来计算每个割草机平台的精确位置。因为割草机平台300a-300c的每个割草机平台都处于球道101之内,所以切割高度模块501可以保持每个割草机平台的切割高度。
[0058]
转到图7b,假设割草机已经行进到一个点,在该点处,割草机平台300a位于第一切割长草区102之内,而割草机平台300b和300c仍然在球道101中。因为它可以单独地跟踪每个割草机平台的位置,所以切割高度模块501可以检测割草机平台300a何时已经或将越入第一切割长草区102。作为响应,切割高度模块501可以向割草机平台300a上的(多个)致动器405发送一个或多个切割高度控制信号,以使其切割高度被动态地调节为匹配分配给第一切割长草区102的切割高度。相反,切割高度模块501可以检测到割草机平台300b和300c仍处于球道101之内,并且可以保持其切割高度。相应地,在图7b中,割草机平台300a的切割
高度高于割草机平台300b和300c的切割高度。如上文所解释的,切割高度模块501可以在检测到割草机平台300a已经或将跨过球道101的边界时提高其高度,以便第一切割长草区102不会被切割得太短。
[0059]
在上文提供的示例中,割草机平台的高度已经在割草机平台跨入被分配了较高切割高度的片区时被动态地调节。因此,切割高度模块501已经被描述为当割草机平台的任何部分跨过边界时调节切割高度。然而,当割草机平台从被分配了较高切割高度的片区过渡到被分配了较短切割高度的片区时(例如,从第一切割长草区102进入球道101),切割高度模块501反而可以当确定割草机平台已经完全过渡到较短的片区时调节切割高度。通过保持针对割草机平台的每个边缘的偏移和/或通过将割草机平台建模为二维形状,切割高度模块501可以准确地检测割草机平台何时超过两个或更多个片区,并且可以相应地调节切割高度。如所建议的,切割高度模块501通常将被配置为将割草机平台设定为分配给割草机平台当前超过的任何片区的最高切割高度。
[0060]
本发明的实施例可以在自动割草机上实施。例如,控制模块220可以被配置为采用从(多个)位置传感器230接收到的当前位置值和适用于待切割区域的任何地图来自动操纵割草机。在控制模块220操纵割草机时,切割高度模块501可以执行上文描述的功能,以在割草机平台从一个片区过渡到另一片区时动态地调节割草机上的每个割草机平台的切割高度。
[0061]
在片区具有嵌套式布置的实施例中,控制模块220可以被配置为最初沿着最内侧的片区的边界操纵割草机,然后向内继续进行,直到整个片区被切割。然后,控制模块220可以在下一个外面的片区重复这一过程,以此类推,直到所有片区被切割。以这种方式,控制模块220可以使切割高度模块501需要做出调节的次数最小化。这种向外推进还可以简化切割高度模块501将需要执行的处理,因为不需要监控割草机平台是否已经越入内部片区,因为内部片区已经被切割。
[0062]
图8提供了区域800的示例,该区域包括以棋盘图案布置的片区801、802。以如上所述的类似方式,切割高度模块501可以动态地调节割草机平台300a-300c的每个割草机平台的切割高度,以创建或保持这种棋盘图案。例如,可以为区域800创建地图,该地图定义了每个片区801、802的边界和针对每个片区的切割高度。使用该地图和当前位置值,切割高度模块501可以检测每个割草机平台300a-300c何时从一个片区过渡到另一片区,并且可以相应地动态调节切割高度。
[0063]
假设片区801被分配了比片区802更短的切割高度,并且假设割草机在图8中示出的方向上行进,切割高度模块501可以检测割草机平台300a-300c的每个割草机平台的前边缘何时跨过或即将跨过片区801的边界进入片区802,并且可以动态地提高割草机平台。类似地,切割高度模块501可以检测割草机平台300a-300c的每个割草机平台的后边缘何时跨过或即将跨过片区802的边界进入片区801,并且可以动态地降低割草机平台。考虑到割草机平台300b位于割草机平台300a和300c的前面,切割高度模块501将在调节割草机平台300a和300c的切割高度之前调节割草机平台300b的高度。独立地调节每个割草机平台的切割高度的能力实现了这种功能性。
[0064]
在不脱离本发明的精神或本质特征的情况下,本发明可以按其他具体形式来体现。所描述的实施例在所有方面都仅被认为是说明性的而非限制性的。本发明的范围因而
由所附权利要求而并非由前面的描述来指示。所有在权利要求的等同意义和范围内的改变都被涵盖在其范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1