一种基于声光多传感器和卫星通信的鱼群养殖监测系统的制作方法
1.本发明涉及属于光电技术、海洋探测、智慧渔业等技术领域领域,具体涉及一种基于声光多传感器和卫星通信的鱼群养殖监测系统。
背景技术:
2.我国是水产养殖大国,水产品产量均占全世界70%,居世界首位。但同时,我国水产养殖业存在着现代化、智能化水平不高,劳动强度大,养殖效率低、污染环境等一系列的问题。传统近海网箱,造价低廉、管理简单。但由于网箱数量日趋庞大和高度密集的网箱排放,使得近海海域长期处于严重超负荷养殖,不少内湾海域生态平衡已遭到破坏。
3.深水网箱养殖是在相对较深海域(通常深度大于15m)进行,相对传统普通网箱养殖方式,可以有效扩展养殖海域、缓解环境压力。深水网箱一般布置在离岸较远,若采用人工观察监测方式,面临着监测不及时、出海往返人工成本高、深远海通信困难等难题。
4.我国网箱养殖监测技术与国外有较大差距,基本处于半人工养殖状态。目前的水下监测手段,只能提供一些简单的水下视频和水质环境监测参数,缺乏对水下鱼群养殖信息全面监测能力。同时,通信技术落后,离岸十几到几十公里后,缺乏有效的信息传输手段。
技术实现要素:
5.为解决现有技术存在的不足,本发明提供了一种基于声光多传感器和卫星通信的鱼群养殖监测系统。
6.本发明的技术方案为:
7.一种基于声光多传感器和卫星通信的鱼群养殖监测系统,包括水下探测结构、水下探测结构上设置有数据打包机,数据打包机将数据打包并通过卫星通讯终端,发送到通信卫星,通信卫星将数据发送到岸基监控终端。
8.进一步的,水下探测结构包括水下结构支架和水下结构支架上的电子设备,水下结构支架分为三层,上层设置有水质传感器和水下接驳盒,水质传感器通过绑扎带固定在结构架的侧杆上,水下接驳盒通过底部的螺栓固定在第一层结构板上,水下接驳盒的侧面通过卡环固定在侧杆上;中层设置有u型壳、水下激光成像设备、水下摄像头和水下照明灯,u型壳采用螺栓固定在第二层结构板上,水下激光成像设备、水下摄像头和水下照明灯固定在u型壳上;下层设置有水下云台,水下云台固定在水下结构架的第三层结构板上,水下声纳安装在水下云台的保护罩内部。
9.进一步的,水下接驳盒上设置有五组水密头,中间一组连接结构缆,另外四组分别连接水下激光成像设备、水下摄像头、水下声纳和水下云台。
10.进一步的,所述水下激光成像设备内设置为532nm纳秒脉冲激光器和高速iccd快门。
11.进一步的,所述水下声纳,采用高频小功率成像声纳,声纳频谱>1.5m,扫描视场角>120
°
,水下单条鱼成像距离>10m。
12.进一步的,所述通信卫星为0.45米ka频段船载动中通卫星终端,可实时与中星16号卫星进行通信,内嵌通信调制解调模块。
13.进一步的,所述岸基监控终端包括前端数据接收机、本地数据服务器和网站服务器。
14.本发明所达到的有益效果为:
15.1、本发明通过水下三维成像、特征提取可获得鱼群生物量(体长、速度等)信息,通过声纳成像监控鱼群数量,通过水下摄像头可对水下环境实时监测,可以有效全面感知鱼群的生长状态,实现深远海养殖全自动化。
16.2、通过卫星通信解决深远海通信难题,保障深远海监测信息的实时传输,并可进行远程操控及监测。
17.3、通过多传感器信息融合,提供投喂决策参考,提供异常信息报警,实现深远海智能养殖信息化和智能化。
附图说明
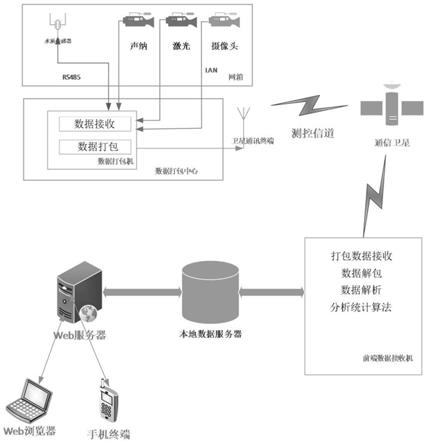
18.图1是本发明系统数据传输示意图;
19.图2是本发明的水下探测结构在升降吊架的悬挂下的示意图;
20.图3是本发明的水下探测结构示意图;
21.图4是鱼群体长测量示意图;
22.图5是多条鱼的体长统计图;
23.图6是鱼群二维成像声纳计数;
24.图7鱼群种类智能识别。
25.图中,01、水下结构支架;02、水质传感器;03、水下激光成像设备;04、u型壳;05、保护罩;06、水下云台;07、底座;08、水下声纳;09、水下摄像头;10、水下照明灯;11、接驳盒;12、卡环;13、水密头。
具体实施方式
26.为便于本领域的技术人员理解本发明,下面结合附图说明本发明的具体实施方式。
27.如图1所示,一种基于声光多传感器和卫星通信的鱼群养殖监测系统,包括水下探测结构、水下探测结构上设置有数据打包机,数据打包机将数据打包并通过卫星通讯终端,发送到通信卫星,通信卫星将数据发送到岸基监控终端。岸基监控终端包括前端数据接收机、本地数据服务器和网站服务器。数据依次通过前端数据接收机、本地数据服务器和网站服务器传送到手机或者电脑的客户端。
28.水下探测结构包括水下结构支架01和水下结构支架01上的电子设备,水下结构支架01分为三层,上层设置有水质传感器02和水下接驳盒11,水质传感器02通过绑扎带固定在结构架的侧杆上,具有水质环境参数实时监测的作用;水下接驳盒11通过底部通过四个m6的六角螺栓固定在第一层结构板上,水下接驳盒11的侧面通过卡环12固定在侧杆上,水下接驳盒11上设置有五组水密头13,中间一组连接结构缆,另外四组分别连接水下激光成像设备03、水下摄像头09、水下声纳08和水下云台06,水下接驳盒11具有将多路数据信号转
换成单路信号的作用,便于数据传输及上传。中层设置有u型壳04、水下激光成像设备03、水下摄像头09和水下照明灯10,u型壳04采用螺栓固定在第二层结构板上,水下激光成像设备03、水下摄像头09和水下照明灯10固定在u型壳04上,水下激光成像设备03可对水下鱼群体长、游速、渔网破损等进行实时监测并三维成像,水下照明灯10提供水下照明环境和条件,便于水下摄像头09进行水下大视场、高分辨实时鱼群监控及鱼类识别;下层设置有水下云台06,水下云台06固定在水下结构架的第三层结构板上,水下声纳08安装在水下云台06的保护罩05内部,水下云台06可360
°
控制转动,便于水下声纳08进行水下远距离传送信号。第三层结构板底部设置有底座07,通过周向六个m8的六角螺栓紧固,具有稳定及支撑的作用
29.所述水下激光成像设备内设置为532nm纳秒脉冲激光器和高速iccd快门。通过飞行时间选通(tof)原理,对反射光进行选择性接收,单次时间可以确定一个距离切片。激光脉冲宽度1ns,探测器开门时间1ns,则光子水下飞行时间1ns,可以得到0.12m的景深图像切片。通过快速帧频,将不同距离处的切片图像信息进行融合,并将图像像素灰度比与距离能量比进行映射,可以实现水下目标三维成像。
30.如图4,鱼群体长测量,根据目标的距离值和目标在视场角内占据的水平像素比,通过距离乘以tan角度获得。
31.通过1
‑
2天的时间测量,得到多条鱼的体长统计图,如图5所示。鱼群体重统计,通过鱼群体长和体重的经验换算公式得到,不同种类鱼的换算公式不同。
32.鱼群速度测量,在体长的基础上,采用“帧间检测法”,对比两帧图像之间鱼头或者鱼尾的水平位移偏移量获得。
33.所述水下声纳08,采用高频小功率成像声纳,声纳频谱>1.5m,扫描视场角>120
°
,水下单条鱼成像距离>10m。
34.如图6所示,将声纳采集的数据转成视频格式,通过数字图像处理方法(图像锐化、阈值分割、轮廓提取等)得到单帧图像内的鱼群数量。单帧图像的鱼群数量和声纳扫描体积之比,即为鱼群密度。对固定体积区域内的鱼群数量进行长期(至少1
‑
2天)监测,得到鱼群密度随着时间的分布函数,积分平均处理,得到网箱的鱼群的平均密度。通过平均密度乘以网箱体积,可以得到网箱内的鱼群数量估计。
35.如图7所示,水下高清视频通过水下摄像头获得。将高清视频流进行人工智能算法处理,通过yolo或ssd等目标识别算法,对视频中的鱼群进行分类识别。
36.目标识别算法通过水下养殖常用的鱼群图片进行训练,可以覆盖常规养殖鱼类,包括三文鱼、鲈鱼、黑鱼等。
37.通过单帧图像得到分类结果,进行不同鱼类数量的比例统计。通过长时间统计,确定网箱内不同鱼类的比例变化。
38.所述通信卫星为0.45米ka频段船载动中通卫星终端,可实时与中星16号卫星进行通信,内嵌通信调制解调模块,采用高精度的捷联惯导技术进行信号跟踪,保证天线始终精确的对准卫星,即使恶劣的海况中,也能确保收发信号的稳定性,可实现视频、语音、数据等业务的传输。
39.水下结构支架01的材质均采用5a06热轧态铝材,该铝材强度高、耐腐蚀性好、质量轻,是水下环境常用设备材料,通过精密机加工及焊接制成探测设备壳体和结构架,同时进行硬质发黑氧化及喷涂,提高了水下多传感器结构的强度、防腐蚀性和可靠性。
40.水下照明灯10为水下探测提供水下照明,水下摄像头09对近距离、大视场范围水下鱼群状态进行动态监测及种类识别,水下激光成像设备03对远距离目标进行成像及三维监测,水下声纳08对大范围内的鱼群数量进行统计监测,水质传感器02对网箱养殖的水体溶氧量、ph值、叶绿素含量及温度值进行实时监测,水下云台06为水下声纳08提供360
°
旋转探测角度,接驳盒11将水下多传感器探测传输线缆进行融合,通过一根结构缆将数据传输到数据中心监测平台,结构缆为10芯制,具有100kg承重及多数据传输能力,其中8芯作为为标准网线传输,2芯作为水下探测设备供电使用
41.以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1