一种具实时监控及自动喂食的家用智能养鱼装置
1.本发明涉及养鱼设备技术领域,更具体地说,它涉及一种具实时监控及自动喂食的家用智能养鱼装置。
背景技术:
2.养鱼既是我国的一个传统,也是人们在生活之余自我消遣和寻找乐趣的一种方式,随着物质生活的日益丰富,几乎每个家庭都养有鱼,但是由于社会节奏的日益加快,人们无法按时给鱼进行喂食且无法观察鱼的状态。
3.家庭养鱼通常是用较大的鱼缸进行饲养,为了提高鱼的生存环境,对鱼缸的功能要求越来越高,尤其是鱼缸在智能化操作上也有很高的要求。
4.现有的养鱼装置存在以下缺点:
5.1.现有的养鱼装置不能自动投放多种鱼食。
6.2.现有的养鱼装置在投放鱼食时不能均匀投在鱼缸每一个位置,导致大量的鱼食浪费,且污染养鱼装置中的水。
7.3.现有的养鱼装置需要持续向养鱼装置中加氧,浪费电量。
技术实现要素:
8.本发明的目的是提供一种具实时监控及自动喂食的家用智能养鱼装置,该装置能够自动向鱼缸中投放不同类别的鱼食,且能够将鱼食沿不同角度投至鱼缸中,使得鱼食投放均匀;此外,该装置能够根据鱼的位置判断是否需向鱼缸中补充氧气,避免向鱼缸中持续供氧费电的情况。
9.本发明的上述技术目的是通过以下技术方案得以实现的:一种具实时监控及自动喂食的家用智能养鱼装置,包括鱼缸,所述鱼缸的侧壁设有水循环装置,所述水循环装置包括主管、过滤装置、水泵、充气装置和分流装置;所述主管的一端由鱼缸的侧壁底端与鱼缸内部连通,所述主管的端部与鱼缸之间设有过滤网;所述主管的另一端依次穿过过滤装置、水泵和充气装置与分流装置连接;所述分流装置包括分流筒体、旋转筒和旋转电机,所述分流筒体为类锥状中空筒体,所述分流筒体与主管的端部连接,所述旋转筒的底部与分流筒体的内侧壁连接,所述旋转筒的顶部与分流筒体的顶部触接,所述分流筒体的顶部设有多个分流孔,多个所述分流孔均连接有支管,所述旋转电机固定安装于分流筒体顶部,且所述旋转电机的输出端贯穿分流筒体的顶面与旋转筒的外侧壁固定连接;所述支管为类l状,所述支管与水平面平行的侧壁设有鱼食储料器,所述鱼食储料器为漏斗状,所述鱼食储料器的侧壁设有电磁阀;所述支管远离分流装置的端部设有文丘里分液头,所述文丘里分液头开有多个出液孔,多个所述出液孔内均连接有分流管;所述鱼缸的侧壁设有控制处理器、无线发射器、无线接收器、电源线插孔、多个声纳传感器一和多个声纳传感器二,多个所述声纳传感器一间隔分布于同一水平线上,多个所述声纳传感器二间隔分布于同一水平线上,且声纳传感器一和声纳传感器二沿鱼缸的竖直方向间隔设置。
10.通过采用上述技术方案,通过在主管的端部连接分流筒体,分流筒体的顶部连接了多个支管,且支管的水平面平行的侧壁安装了鱼食储料器,这样可以将不同的鱼食通过不同的支管射入鱼缸中,达到对不同种类的鱼的喂食效果;通过在每个支管的端部安装文丘里分液头,且文丘里分液头的出液孔均安装了分流管,可以将鱼食沿不同角度射入鱼缸,达到将鱼食均匀投在鱼缸的每一个角落的效果;通过在鱼缸的侧壁安装声纳传感器一和声纳传感器二,可以通过判断鱼的位置来识别是否需要加氧,从而达到省电的效果。
11.本发明进一步设置为:所述鱼缸的侧壁顶端设有支撑板,所述支撑板为类l状,所述支撑板的外侧壁设有注水管,所述注水管的出水端位于鱼缸的正上方,所述注水管安装有进水阀;所述鱼缸侧壁底部设有排水管,所述排水管的侧壁设有排水阀。
12.通过采用上述技术方案,通过在支撑板上设置注水管,在鱼缸侧壁底部安装排水管,可以通过调节进水阀和排水阀来控制鱼缸中的液位高度。
13.本发明进一步设置为:所述支撑板的顶部内侧设有监控装置,所述监控装置包括底座、电机一、转轴和摄像头,所述底座的顶部与支撑板的顶部内侧固定连接,所述底座与摄像头之间通过转轴一连接,所述转轴的端部与电机一的输出端固定连接,所述电机一与支撑板的内侧壁固定连接。
14.通过采用上述技术方案,整个监控装置通过底座固定在支撑板上,电机一的输出端旋转可以带动摄像头旋转,可以实现摄像头对鱼缸中每一个角落进行实时监控,从而能够对鱼缸中鱼的情况进行实时监控。
15.本发明进一步设置为:所述鱼缸的内侧壁设有水位传感器一和水位传感器二,所述水位传感器一和水位传感器二沿鱼缸的竖直方向间隔设置。
16.通过采用上述技术方案,将水位传感器一和水位传感器二安装在不同高度,可以识别鱼缸中的水位高度值是否超过临界点,可以使鱼缸在加氧、净化或加鱼食过程中保持水位不会超出临界点。
17.本发明进一步设置为:所述鱼缸两相对的内侧壁分别设有多个红外线发射器和多个光传感器,多个所述红外线发射器和多个光传感器均沿鱼缸的竖直方向等距排列,且同一水平线上的所述红外线发射器与光传感器一一对应。
18.通过采用上述技术方案,红外线发射器发射的红外线穿过鱼缸中的水,光线最终传到光感传感器上,光传感器通过识别红外线的强度,从而得出鱼缸中水的浑浊程度,从而判断鱼缸中的水是否需要更换。
19.本发明进一步设置为:所述过滤装置包括过滤器外壳、挡水板一、转轴二、电机二、吸附装置、复位弹簧、挡水板二、转轴三、过滤管路和非过滤管路;所述过滤管路的两端和非过滤管路的两端均与主管连接,所述转轴二安装于过滤管路的入口端与非过滤管路的入口端的相交处,所述转轴二与挡水板一固定连接,所述挡水板一、过滤管路和非过滤管路的横截面的形状尺寸均相同;所述电机二固定安装于过滤器外壳的顶部,所述电机二的输出端穿过过滤器外壳与转轴二的端部固定连接;所述转轴三安装于过滤管路的出口端与非过滤管路的出口端的相交处;所述转轴三与挡水板二固定连接,所述挡水板二的横截面积大于过滤管路的横截面积;所述复位弹簧的一端与过滤管路的侧壁固定连接,所述复位弹簧的另一端与挡水板二的侧壁固定连接。
20.通过采用上述技术方案,主管进入过滤装置中分为过滤管路和非过滤管路,当不
需要进行过滤时,鱼缸中的水直接走非过滤管路,这样可以减小水在过滤装置中沿程阻力损失和局部阻力损失,达到减小泵的功耗的效果;通过设置电机二来控制挡水板一来选择是否需要对鱼缸中的水进行过滤;通过在挡水板二的侧壁设置一个复位弹簧,且挡水板二的侧面面积大于过滤管路和非过滤管路的面积,可以使水流出过滤装置时不会倒灌进入另一个管路。
21.本发明进一步设置为:所述吸附装置包括pp棉、活性炭和反渗透膜,所述pp棉、活性炭和反渗透膜均位于过滤管路内,且所述pp 棉、活性炭和反渗透膜按水流方向依次等距分布。
22.通过采用上述技术方案,吸附装置设置三层吸附,可以有效实现对鱼缸中的水进行过滤的效果。
23.本发明进一步设置为:所述充气装置包括充气泵和微孔扩散器,所述充气泵的出气端与微孔扩散器连接,所述微孔扩散器位于主管内。
24.通过采用上述技术方案,在充气泵的出气端安装微孔扩散器,有助于氧气融入水中,提高氧气的溶解效率。
25.综上所述,本发明具有以下有益效果:通过在主管的端部连接分流筒体,分流筒体的顶部连接了多个支管,且支管的水平面平行的侧壁安装了鱼食储料器,这样可以将不同的鱼食通过不同的支管射入鱼缸中,达到对不同种类的鱼的喂食效果;通过在每个支管的端部安装文丘里分液头,且文丘里分液头的出液孔均安装了分流管,可以将鱼食沿不同角度射入鱼缸,达到将鱼食均匀投在鱼缸的每一个角落的效果;通过在鱼缸的侧壁安装声纳传感器一和声纳传感器二,可以通过判断鱼的位置来识别是否需要加氧,从而达到省电的效果。
附图说明
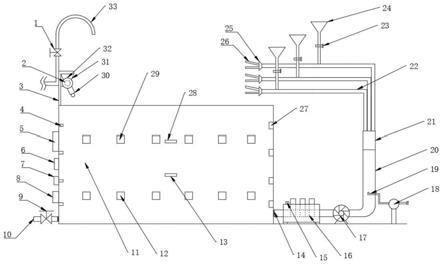
26.图1是本发明实施例中一种具实时监控及自动喂食的家用智能养鱼装置的结构示意图;
27.图2是本发明实施例中一种具实时监控及自动喂食的家用智能养鱼装置的分流装置的结构示意图;
28.图3是本发明实施例中一种具实时监控及自动喂食的家用智能养鱼装置的过滤装置内部结构示意图;
29.图4是本发明实施例中一种具实时监控及自动喂食的家用智能养鱼装置的系统结构示意图。
30.图中:1、进水阀;2、转轴一;3、支撑板;4、红外线发射器; 5、控制处理器;6、无线发射器;7、无线接收器;8、电源线插孔; 9、排水阀;10、排水管;11、鱼缸;12、声纳传感器二;13、水位传感器二;14、过滤网;15、电机二;16、过滤器外壳;17、水泵; 18、充气泵;19、微孔扩散器;20、主管;21、分流筒体;22、支管; 23、电磁阀;24、鱼食储料器;25、文丘里分液头;26、分流管;27、光传感器;28、水位传感器一;29、声纳传感器一;30、摄像头;31、底座;32、电机一;33、注水管;34、旋转筒;35、分流孔;36、旋转电机;37、出液孔;38、挡水板一;39、转轴二;40、pp棉;41、活性炭;42、反渗透膜;43、过滤管路;44、复位弹簧;45、挡水板二;46、转轴三;47、非过滤管路;48、移动终端。
具体实施方式
31.以下结合附图1
‑
4对本发明作进一步详细说明。
32.实施例:一种具实时监控及自动喂食的家用智能养鱼装置,如图 1至图4所示,包括鱼缸11,鱼缸11的侧壁安装有水循环装置,水循环装置包括主管20、过滤装置、水泵17、充气装置和分流装置;主管20的一端由鱼缸11的侧壁底端与鱼缸11内部连通,主管20的端部与鱼缸11之间安装有过滤网14;主管20的另一端依次穿过过滤装置、水泵17和充气装置并与分流装置连接;分流装置包括分流筒体21、旋转筒34和旋转电机36,分流筒体21为类锥状中空筒体,分流筒体21与主管20的端部连通,旋转筒34的底部与分流筒体21 的内侧壁活动连接,旋转筒34的顶部与分流筒体21的顶部触接,分流筒体21的顶部设有多个分流孔35,多个分流孔35均连接有支管 22,旋转电机36固定安装于分流筒体21顶部,且旋转电机36的输出端贯穿分流筒体21的顶面与旋转筒34的外侧壁固定连接;支管22为类l状,支管22与水平面平行的侧壁安装有鱼食储料器24,鱼食储料器24为漏斗状,鱼食储料器24的侧壁安装有电池阀23;支管22远离分流装置的端部安装有文丘里分液头25,文丘里分液头25 开有多个出液孔37,多个出液孔37内均连接有分流管26;鱼缸11 的侧壁固定安装有控制处理器5、无线发射器7、无线接收器、电源线插孔8、多个声纳传感器一29和多个声纳传感器二12,多个声纳传感器一29间隔分布于同一水平线上,多个声纳传感器二12间隔分布于同一水平线上,且声纳传感器一29和声纳传感器二12沿鱼缸 11的竖直方向间隔设置。
33.在本实施例中,该装置的不同鱼食储料器24转有不同的鱼食,当需要为鱼缸11中加入鱼食时,操作者可在移动终端48选择加入哪一种鱼食,移动终端48将可视化信息传递到无线接收器上,无线接收器再将可视化信息传递给控制处理器5,控制处理器5将可视化信息转化为机械操作信息,然后控制处理器5首先将信息传递给水泵 17,水泵17开始工作,鱼缸11中的水穿过过滤网14进入主管20,然后经过过滤装置和充气装置到达分流装置中,控制处理器5调节旋转电机36开始工作,旋转电机36的输出端带得动旋转筒34进行旋转,使旋转筒34的顶部与所需要加鱼食类型所对应的支管22的分流孔35对齐,此时主管20中的水直接进入对应支管22中;控制处理器5同时还要控制电池阀23,使得鱼食储料器24中的鱼食进入支管 22,然后随着支管22中的水进入文丘里分液头25中,文丘里分液头 25将均匀把水管中的水分为多条喷射路径,从而实现对鱼缸11的不同位置加入特定的鱼食;在鱼缸11的侧壁固定安装多个声纳传感器一29和多个声纳传感器二12,声纳传感器一29可以感应鱼缸11上部鱼的数量,声纳传感器二12感应鱼缸11下部鱼的数量;当缺氧时,鱼会向上游动,所以在控制处理器5中输入了相应判断程序,当声纳传感器二12在一个小时的时间内均未感应到鱼,且声纳传感器一29 识别到大量的鱼时,此时控制处理器5将判定鱼缺氧,此时控制水泵 17,同时控制充气泵18进行充气,充气泵18连接氧气瓶(图中未标),此时氧气通过微孔扩散器19进入水中,达到对鱼缸11中加氧的效果,当声纳传感器二12感应到鱼时,控制处理器5将判定氧气充足,此时将水泵17和充气泵18停止工作;电源线插孔8通过电源线插在插座上实现对整个装置的电性装置供电。
34.鱼缸11的侧壁顶端安装有支撑板3,支撑板3为类l状,支撑板3的外侧壁安装有注水管33,注水管33的出水端位于鱼缸11的正上方,注水管33安装有进水阀1;鱼缸11侧壁底部安装有排水管 10,排水管10的侧壁安装有排水阀9。
35.在本实施例中,排水阀9和进水阀1均是通过控制处理器5进行电性控制,从而达到
自动加水和排水的效果。
36.支撑板3的顶部内侧安装有监控装置,监控装置包括底座31、电机一32、转轴和摄像头30,底座31的顶部与支撑板3的顶部内侧固定连接,底座31与摄像头30之间通过转轴一2连接,转轴的端部与电机一32的输出端固定连接,电机一32与支撑板3的内侧壁固定连接。
37.在本实施例中,摄像头30持续工作,实时监控鱼缸11中的状态,摄像头30将画面信息传递给控制处理器5,控制处理器5将信息进行加工,将信息加工成可视化信息,然后控制处理器5将信息发送给无线发射器7,无线发射器7将信息传递到移动终端48,操作者便可在移动终端48上时刻观测鱼缸11中的情况;操作者还可以将转动摄像头30,改变监控角度,操作者只需在移动终端48进行角度控制,移动终端48将可视化信息传递给无线接收器,无线接收器将信息传递给控制处理器5,控制处理器5将信息转化为操作信号,然后控制电机一32进行转动,从而达到改变监控角度的效果。
38.鱼缸11的内侧壁固定安装有水位传感器一28和水位传感器二 13,水位传感器一28和水位传感器二13沿鱼缸11的竖直方向间隔设置。
39.在本实施例中,水位传感器一28位于水位传感器二13的正上方,在上述实施例中,当需要加食、净化、加氧时都需要水泵17将鱼缸 11中的水抽出,实现水循环,由于部分水进入水循环中,会导致鱼缸11中的水位下降,当水位传感器二13未识别到水时,水位信息传递给控制处理器5,控制处理器5判定水位太低,此时控制处理器5 将打开进水阀1,使外界水通过注水管33进入鱼缸11中,当水位传感器二13识别到水时,水位传感器二13将水位信息传递到控制处理器5中,控制处理器5将判定水位达到标准水位,此时控制处理器5 关闭进水阀1;当水泵17停止工作后,鱼缸11中的水会增加,当水位传感器一28识别到水时,将水位信息传递给控制处理器5,控制处理器5判定水位已超出标准水位,此时控制处理器5打开排水阀9,使鱼缸11中的水从排水管10中排出,当水位传感器一28未识别到水且水位传感器二13识别到水时,水位传感器一28和水位传感器二 13将水位信息传递给控制处理器5,控制处理器5结合两个信息判定水位达到标准值,此时关闭排水阀9。
40.鱼缸11两相对的内侧壁固定安装有多个红外线发射器4和多个光传感器27,多个红外线发射器4和多个光传感器27均沿鱼缸11 的竖直方向等距排列,且同一水平线上的红外线发射器4与光传感器 27一一对应。
41.在本实施例中,红外线发射器4持续工作,水平射出红外线,光传感器27识别红外线强度,当鱼缸11中的水很浑浊时,光传感器 27识别的红外线强度很低,此时光传感器27将光强度信号传递到控制处理器5中,控制处理器5在进行后续操作。
42.过滤装置包括过滤器外壳16、挡水板一38、转轴二39、电机二 15、吸附装置、复位弹簧44、挡水板二45、转轴三46、过滤管路43 和非过滤管路47;过滤管路43的两端和非过滤管路47的两端均与主管20连接,转轴二39安装于过滤管路43的入口端与非过滤管路 47的入口端的相交处,转轴二39与挡水板一38固定连接,挡水板一38、过滤管路43和非过滤管路47的横截面的形状尺寸均相同;电机二15固定安装于过滤器外壳16的顶部,电机二15的输出端穿过过滤器外壳16与转轴二39的端部固定连接;转轴三46安装于过滤管路43的出口端与非过滤管路47的出口端的相交处;转轴三46 与挡水板二45固定连接,挡水板二45的横截面积大于过滤管路43 的横截面积;复位弹簧44的一端与过滤管路43的侧壁固定连接,复位弹簧44的另一端与挡水板二45的侧壁固定连接。
43.在本实施例中,根据上述实施例光传感器27识别到红外线强度较低时,将信息传递到控制处理器5中,控制处理器5会判定鱼缸 11中的水很浑浊,此时会控制水泵17工作,同时会控制电机二15 的输出端旋转,带动挡水板一38旋转,挡水板一38将非过滤管路 47堵塞,使得流入过滤装置的水全部进入过滤管路43中,水穿过吸附装置,然后流出过滤装置,在过滤装置出口处,当水未对挡水板二 45进行冲击时,复位弹簧44处于正常状态,挡水板二45位于正中间,当水冲出过滤装置时,水会冲击挡水板二45,使挡水板二45堵住非过滤管路47,防止水倒灌进入非过滤管路47中;当过滤完成后,挡水板二45受复位弹簧44的作用回到初始位置。
44.吸附装置包括pp棉40、活性炭41和反渗透膜42,pp棉40、活性炭41和反渗透膜42均位于过滤管路43内,且pp棉40、活性炭 41和反渗透膜42按水流方向依次等距分布。
45.在本实施例中,水进入过滤装置中的过滤管路43时,会依次穿过pp棉40、活性炭41和反渗透膜42,三层吸附提高水的水质。
46.充气装置包括充气泵18和微孔扩散器19,充气泵18的出气端与微孔扩散器19连接,微孔扩散器19位于主管20内。
47.在本实施例中,微孔扩散器19能打散氧气,从而使氧气更容易溶入水中。
48.工作原理:通过在主管20的端部连接分流筒体21,分流筒体21 的顶部连接了多个支管22,且支管22的水平面平行的侧壁安装了鱼食储料器24,这样可以将不同的鱼食通过不同的支管22射入鱼缸11 中,达到对不同种类的鱼的喂食效果;通过在每个支管22的端部安装文丘里分液头25,且文丘里分液头25的出液孔37均安装了分流管26,可以将鱼食沿不同角度射入鱼缸11,达到将鱼食均匀投在鱼缸11的每一个角落的效果;通过在鱼缸11的侧壁安装声纳传感器一 29和声纳传感器二12,可以通过判断鱼的位置来识别是否需要加氧,从而达到省电的效果。
49.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1