使用活作物的实时光谱分析的农业养料施用的制作方法
1.本描述涉及农业养料施用器。更具体地,本描述涉及提供基于活作物的养料分析来控制养料施用的农业养料施用器。
背景技术:
2.对用于生长中的作物的养料的有效选择、施用和时机掌握对于现代农业是必不可少的。随着技术提高了向各个行的植物输送精确养料水平的能力,产量也有所提高。在定位系统(诸如,gps)的帮助下,农民可以精确地绘制他们的土壤的养料含量,然后可以使用与拖拉机上的养料图相结合的gps来根据需要将各种量的养料(诸如,肥料)输送至他们田地的各个部分,而不是在整个田地上施用一设定的量。
3.上面的讨论仅是作为一般背景信息被提供的,并非旨在用于帮助确定要求保护的主题的范围。
技术实现要素:
4.农业养料施用器包括容器和养料分配组件,所述养料分配组件能够操作地联接到所述容器以从所述容器输送养料。提供光谱反射作物感测系统,所述光谱反射作物感测系统包括光学窗口。呈现组件被安装到所述农业养料施用器,并且被配置为在所述农业养料施用器移动时将田地中的活植物定位成靠近所述光谱反射作物感测系统的所述光学窗口。控制器被联接到所述光谱反射作物感测系统和所述养料分配组件。所述控制器被配置为从所述光谱反射作物感测系统获取指示所述活植物中测量到的养料水平的信息、并且基于所述测量到的养料水平和一目标养料水平来确定补救养料量。所述控制器基于所述补救量来控制所述养料分配组件。
5.提供本发明内容以按简化形式介绍概念的选择,所述概念在下面的具体实施方式中被进一步描述。本发明内容并非旨在标识要求保护的主题的关键特征或必要特征,也非旨在用于帮助确定要求保护的主题的范围。要求保护的主题不限于解决背景技术中指出的任何或所有缺点的实施方式。
附图说明
6.图1是根据一个实施例的农业养料施用器的示意性俯视平面图。
7.图2是根据一个实施例的光谱作物感测模块的示意图。
8.图3a是根据一个实施例的用于幼苗和特别脆弱的小植物的光谱作物感测模块的呈现组件的示意性截面图。
9.图3b是根据一个实施例的用于幼苗和特别脆弱的小植物的光谱作物感测模块的呈现组件的示意性透视图。
10.图4是根据另一实施例的光谱作物感测模块的呈现组件的示意图。
11.图5a和图5b分别是根据另一实施例的光谱作物感测模块的呈现组件的俯视平面
图和示意性透视图。
12.图6是根据一个实施例的向农业作物施用养料的方法的流程图。
13.图7是根据一个实施例的农业养料施用器的控制系统的示意图。
14.图8是根据一个实施例的施用农业养料的方法的流程图。
15.图9是根据一个实施例的测量活作物中的养料水平的方法的流程图。
16.图10是在图1中示出的农业养料施用器的框图,除了该农业养料施用器与远程服务器架构中的元件通信之外。
17.图11是其中可以部署(例如)图7的元件或其部分元件的计算环境的一个示例。
具体实施方式
18.如上所述,对输送至生长中的作物的养料的有效选择、施用和时机掌握对于有效的农业非常重要。本文描述的实施例通常以新方式采用设备/技术以提供对生长中的(即,根在土地中的活植物)作物的了解。该信息允许基于实际的作物所需来更精确地向生长中的作物输送养料。下面描述了向生长中的作物输送养料的农业养料输送系统和方法。
19.最近,对植物物质的光谱分析提供了关于收割的植物以及在实验室环境(setting)中的大量信息。例如,近红外反射(nir)技术朝向收割的作物生成近红外光照并且分析反射的返回信号。如本文所使用的,近红外是指具有开始于800纳米至2,500纳米的波长的光照。该技术能够几乎立即产生结果,并且被用于实验室环境以及收割操作。在收割期间,nir用于确定所收割的作物的水分、干物质、蛋白质、淀粉、纤维、中性洗涤纤维、酸性洗涤纤维和糖分。农民可以使用这些信息来计划针对下一季度的施肥。采用该技术的一种可商业获取的产品以商品名harvestlab 3000出售,可从伊利诺伊州莫林的迪尔公司(deere&company)获取。harvestlab 3000设备可用于实验室环境以及收割机两者中以基本上实时地获取数据,使得该数据可以与收割机位置相关联,以用于未来的规划。
20.还相信类似的技术可以与中红外反射技术(mir)一起使用,该中红外反射技术采用具有大于2500纳米但小于约8000纳米波长的光照。此外,以下描述的实施例包括使用nir和mir的组合。虽然本公开的大部分是针对nir的,但这是出于解释的目的,并且同样适用于mir。
21.根据以下描述的实施例,将光谱技术(诸如,nir技术)应用于生长中的作物以便评估作物的养料水平。然而,与生长中的作物一起使用光谱技术(诸如,nir)涉及重大的挑战。首先,光谱传感器可能会受到环境光(例如,阳光)的不利影响。虽然这在实验室环境中或在作物已经从地面上切断的农业机器中是容易控制的,但当作物保持扎根至地面时则是非常困难的。其次,光谱技术要求将正在被感测的材料显着地提供至光学光谱传感器。同样地,这在实验室环境中或在作物已经从地面上切断/移除的环境中使容易解决的。第三个困难是将生长中的作物呈现给光谱传感器的过程不应损伤该作物。下面阐述的实施例总体上克服了这些挑战中的一些或全部,从而允许将光谱技术(诸如,nir和/或mir)应用于生长中的作物,从而允许使用由此类技术提供的大量信息来为生长过程(例如,养料的输送)提供信息。
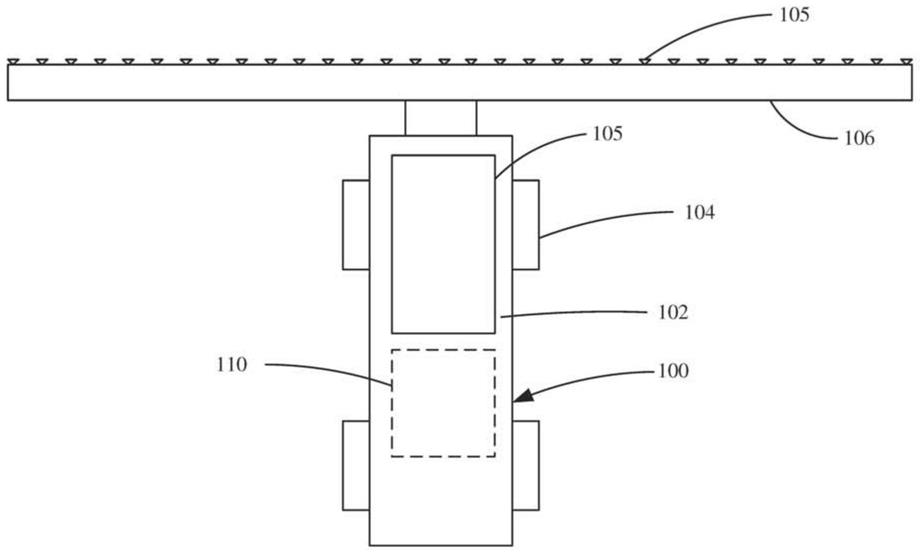
22.图1是根据一个实施例的农业养料施用器的示意性俯视平面图。虽然在图1中图示的示例示出了自供能的农业养料施用器,但本领域技术人员将理解的是,可以针对任何合
适的农业机器来实践实施例,无论该农业机器是自推进式的还是牵引式的。在一些实施例中,农业机器是农业养料施用器。然而,也可以用侦察作物以确定养料需求并将该养料需求与位置相关联的农业机器来实践实施例。此外,本文所描述的实施例同样适用于施用干养料、液体养料和/或气体养料的养料施用器。更进一步地,实施例同样适用于例如施用侧面施肥(side dress)应用和顶部施肥(top dress)应用的养料施用器。如本文所施用的,农业养料施用器旨在涵盖在农业中使用的喷洒器、散布机、侧面施肥钻机和高容量养料施用器。
23.农业养料施用器100包括底盘102,由轮或轨道104支撑该底盘102以在生长中的作物的田地上行进。养料施用器100包括养料容器或罐105,该养料容器或罐105联接到养料施用器组件106以将养料分配至田地中的作物。养料可以是干养料、液体养料、气体养料或其组合的形式。如图1所示,施用器组件106包括具有多个喷嘴108的悬臂,该多个喷嘴108安装在悬臂上并且被布置成分配养料。根据一个实施例,养料施用器100包括光谱作物感测模块110或联接到光谱作物感测模块110,该光谱作物感测模块110被配置为将活植物(即,生长中的作物)定位成与光学窗口接触,该光学窗口允许红外光照穿过该光学窗口,使得该红外光照的反射可以被光谱作物感测模块110的传感器接收,从而提供关于水分、氮、钾和蛋白质中的至少一种的作物度量、以及提供可以限制氮、钾和/或蛋白质摄取或蛋白质积累的其他项目的度量。此类其他项目的示例包括磷和硫以及必需的植物微量营养素。光谱作物感测模块110相对于农业养料施用器100安装成使得光学光谱技术(诸如,nir和/或mir)不受阳光的影响,也不损伤生长中的植物。可以理解的是,假设作物可以处于其从幼苗到成熟植物的生命周期中的任何状态,光谱作物感测模块110可以包括以技术上有效的、不受到环境阳光的过度影响、且不损伤植物的方式将植物小心地呈现给光学传感器的不同技术/机制。
24.图2是根据一个实施例的光谱作物感测模块的示意图。光谱作物感测模块110通常包括容纳红外反射(nir和/或mir)发射器/接收器模块114的壳体112。发射器/接收器模块114被配置为将红外光照116透射通过光学窗口118以从生长中的植物120反射。反射的光照122被发射器/接收器模块114接收并且向控制器124提供信号,根据已知技术分析该信号以确定生长中的植物的养料水平等。示例包括氮、钾、水分、磷、硫、钙和蛋白质(虽然在技术上蛋白质不是养料,而是由氨基酸/营养素构成的有机化合物)。当农业养料施用器经过生长中的植物时,可以将生长中的作物中的基本上实时的养料水平的这些测量结果与正常作物的在当前生命周期(例如,幼苗、中间作物或成熟作物)的目标养料水平进行比较,并且各种养料的必要水平可以被确定以纠正任何缺乏,可以被实时地计算并且被施用到生长中的植物。此外,虽然图1中所示的实施例采用了单个光谱作物感测模块110,但可以明确考虑了可以使用多个这样的传感器模块来提供附加的粒度(granularity)水平,一直持续到植物的各个行。
25.根据以下描述的实施例,向农民呈现用于不同成熟水平的作物的、用于将生长中的作物呈现至光学传感器的多个可拆卸的机械组件。
26.图3a是用于幼苗和特别脆弱的小植物的光谱作物感测模块110的呈现组件150的示意性截面图。组件150通常包括渐缩的前缘152和具有孔156的底部154。光学窗口118设置在孔156附近、或甚至设置在孔156内。壳体112设置在孔156上方。壳体112通常是封闭的,使得仅有可以进入组件光学窗口118的光通过该孔156。
27.在一些示例中,组件150由相对低摩擦的材料(诸如,塑料)制成,并且该组件150铰
接地联接在农业养料施用器100的底盘102的下方,使得可以由施用器的操作者升高和降低该组件150。如图3a所示,组件150还包括联接到自动高度控制系统161的线缆160,该自动高度控制系统161控制呈现组件150相对于底盘102的竖直移动。自动高度控制系统161控制呈现组件150的高度,以便在不损伤活植物的情况下获取该活植物的准确测量结果。因此,随着致动器160被降低或线缆被加长,呈现组件150下降,直到该呈现组件150接触底盘102下方的地面。另外,线缆160可以包括弹簧、或联接到弹簧(诸如,拉伸弹簧),从而允许呈现组件150相对于地面可选择的偏置。当农业养料施用器100在田地上行驶时,植物120将沿由箭头162指示的方向经过窗口118。呈现组件150包括阻挡环境光的一个或多个不透明的窗帘或波纹管(bellow)159。由于壳体112防止除了穿过窗口118的光之外的所有光进入光谱作物感测模块110,该系统基本上将传感器与阳光和其他误差源隔离。此外,传感器与生长中的植物进行密切的光学接触,使得可以获取有效的红外反射信号。再者,通过呈现组件在作物上方滑动或经过时对呈现组件提供可选择的偏置,生长中的作物将不会被损伤。
28.图3b是根据一个实施例的用于幼苗和特别脆弱的小植物的光谱作物感测模块的呈现组件164的示意性透视图。在图3b中图示的实施例类似于在图3a中图示的实施例,并且类似的部件被类似地编号。组件158包括四个连杆158,该四个连杆158被配置成能够枢转地联接到农业养料施用器的底盘102,以允许降低或升高组件164。组件164还包括前缘152中的表面轮廓165,以便向壳体112下方的光学窗口118呈现更多的植物。
29.关于图3a和图3b描述的实施例对于早季中的小的谷类作物特别有用。该设计可以体现在底部有洞或孔的简单的滑橇(sled)上,传感器可以通过该洞或孔进行查看并且看到作物。这样的设计可以使用滑橇和传感器的重量来压在作物上以获取足够的读数,或者可以选择性地偏置该滑橇以相对于重力提供仅附加的力或减小的力。滑橇可以由任何合适的材料形成,只要该材料是不透明的。在一个示例中,滑橇由不透明的塑料形成。
30.图4是根据另一实施例的光谱作物感测模块110的呈现组件170的示意图。呈现组件170被设计用于季节后期(诸如,在茎秆可见的第一节点之前,feekes生长阶段6)的小的谷类作物。组件170包括两个浮筒172、174,该浮筒将较高的作物分开,使得该较高的作物在区域176内通过。此外,呈现组件170包括用于光谱传感器(诸如,nir和/或mir传感器)的壳体112的位置178。优选地,窗口118被定位和布置为观察作物的下部部分。作物的该下部部分被认为是可以首先检测到养料缺乏的地方,因为对于在植物中可移动的养料(诸如,氮)的养料缺乏,再移动会将养料从较老的植物组织移动到较新的组织/生殖部分。类似于呈现组件150,呈现组件170也能够选择性地部署在农业养料施用器100的底盘102下方。另外,如上所述,本文所描述的实施例可以包括多个这样的呈现组件和光谱传感器,以便提供与生长中的作物有关的增加的粒度信息。
31.图5a和图5b分别是根据另一实施例的光谱作物感测模块110的呈现组件200的俯视平面图和示意性透视图。组件200被设计用于成熟的成行的作物。组件200可以包括一个或多个茎秆提升器201以提升分枝,并且组件200通常具有相对大的腔室202以让作物通过,但仍然控制环境光。一侧是传送器204,该传送器204用于将作物直接移动通过腔室202。该传送器旨在以与地面速度同步的速度运行,以免损伤植物。另一侧是一个或多个孔,该孔允许壳体112内的光谱传感器(诸如,nir和/或mir传感器)通过窗口118查看并扫描作物。优选地,组件200的一侧包括弹簧或其他可选择的偏置机构(在附图标记206处示意性地示出),
以便选择施加在作物材料上的偏置量,使得使用光谱传感器获取足够的读数,而非太大的力以致于损伤穿过腔室202的作物。
32.图6是根据一个实施例的向农业作物施用养料的方法的流程图。方法300开始于框302,在框302处,使用红外反射技术从活作物获取反射响应。在框304处,该反射响应用于计算活作物中的一个或多个养料水平。用于该养料水平计算的养料的示例包括氮306、水分307、钾308、蛋白质309、磷310、硫311和钙312。接下来,在框314处,将(一个或多个)测量到的养料水平与用于活作物的目标水平进行比较。可以基于活作物的生命周期中的位置(例如,幼苗、中间作物、成熟作物)以及其他合适的因素来调整该目标。例如,可以使用附加的传感器和技术来获取与活作物相关的附加信息,该附加信息可以与光谱衍生的养料信息组合使用。附加传感器的示例包括(位于施用器上的、由卫星成像提供的、和/或安装到有人或无人驾驶航空系统上的)可见光谱相机、生物量传感器等,该可见光谱相机可以评估活作物的存在和/或颜色。无论如何,在框316处,基于测量到的养料水平与目标水平的比较来确定活作物的补救养料量。接下来,在框318处,将在框316处计算的补救养料量实际施用于活作物。
33.如虚线框320所示的,方法300还可以包括存储信息,因为这样的信息可能对后续操作是有用的。这样的被存储的信息的示例可以包括测量到的养料水平322、施用的养料324、养料施用器的位置326(通过gps信号或其他合适的位置信息)、和/或施用时间328。可以将信息本地存储在农业养料施用器中,或无线传输到远程养料信息数据存储装置。
34.图7是根据一个实施例的农业养料施用器的控制系统的示意图。控制系统400包括施用器控制器402,该施用器控制器402在一个示例中可以是微处理器。控制器402包括或联接到合适的存储器,以便运行指令序列以提供与施用器功能相关的测量和/或控制功能。控制器402联接到一个或多个光谱传感器404,每个光谱传感器可以包括其自身的控制器和发射器/接收器(如图2所示)。作为使用多个光谱传感器404的一个示例,nir和/或mir传感器404可以安装在农业喷洒器的多段悬臂的每段上。因此,如果喷洒器具有五段,则将采用五个这样的传感器404。作为使用多个这样的光谱传感器的另一示例,在具有空气悬臂的高容量养料施用器上,有两段,并因此将使用两个光谱传感器404。随着施用器移动穿过田地,控制器402从光谱传感器404接收指示经过(一个或多个)传感器404的(一个或多个)光学窗口的生长中的作物/活植物的养料水平的信息。
35.控制器402还联接到位置检测系统406,该位置检测系统406提供农业养料施用器的地理位置的指示。在一个示例中,位置检测模块406使用已知的gps技术来提供施用器的纬度和经度位置。然而,实施例可以包括提供与施用器有关的有用的位置信息的任何合适的位置检测系统。位置传感器的合适示例包括向地球上任何地方的合适接收器提供地理位置和时间信息的任何合适的全球导航卫星系统(gnss)。在一个示例中,gnss设备是gps接收器。然而,可以使用其他合适的gnss设备,诸如俄罗斯的(glonass)系统。此外,对于模块154,也可以使用差分gps技术。最后,可以使用非基于gnss位置的信令系统(诸如,loran或手机/wifi三角测量)以用于位置检测模块406。因此,凭借控制器402与(一个或多个)传感器404和位置检测系统406两者的连接,可以将在活作物中实际测量的养料水平与活作物的位置相关联,以便施用必需的养料、或采取其他合适的补救动作。此外,如上所述,养料信息可以与被控制器402本地存储的位置信息相关联,或者使用无线通信存储在远程数据系统
中。
36.如图7所示,控制器402联接到无线通信模块408,该无线通信模块408允许控制器402与一个或多个远程设备无线通信,优选地双向通信。合适的无线通信的示例包括但不限于:蓝牙(诸如,额定功率等级为2的蓝牙规范2.1);wi-fi规范(诸如,ieee 802.11.a/b/g/n);已知的rfid规范;蜂窝通信技术(诸如,gprs/gsm/cdma);wimax(ieee 802.16)和/或卫星通信。使用无线通信模块408,控制器402可以将测量的养料信息、施用的养料信息、位置数据和/或时间数据传送到合适的远程设备,诸如基于云的养料信息存储装置111(如图9所示)。
37.此外,控制器402可以联接到一个或多个附加传感器410,该一个或多个附加传感器410可以提供与生长中的作物有关的附加信息。这样的附加传感器可以包括可见光谱相机、生物量传感器、土壤传感器、氧气传感器、二氧化碳传感器等,该可见光谱相机可以提供作物存在、高度和/或颜色的指示。来自这些附加传感器410中的一个或多个附加传感器的信息可以被提供给控制器402以调整农业养料施用器100的功能。例如,可见光谱相机可以用于确定作物生物量的估计,然后该估计用于提供作物生命周期的指示,该指示为目标养料水平提供信息。
38.如图7所示,控制器402还联接到养料分配系统412,该养料分配系统412控制养料施用器的各个喷嘴、或其他合适的养料流/输送机构。以这种方式,当农业养料施用器经过作物上方时,养料向作物的流动速率或输送速率可以基于在作物中实际测量的养料。基于对植物在田地中需求的实际测量,这为植物提供了该植物所需的具体养料。
39.图8是根据一个实施例的施用农业养料的方法的流程图。方法420开始于框420,在框420处,使用一个或多个光谱传感器来感测活作物,如上所描述的。例如,位于农业养料施用器下方的单个光谱传感器可以感测在该传感器下方经过的活植物。接下来,在框424处,使用至少一个附加传感器或检测器来获取关于作物或田地的附加信息。在一个示例中,使用可见光和/或多光谱相机428来观察养料施用器的整体宽度并确定作物的相对健康状况。然后使用光谱传感器信号来测量中心行或段。接下来,在框433处,光谱传感器信号位置与附加传感器信息相关联。在从可见光/多光谱相机获取附加信息的示例中,将相机在横跨养料施用器的宽度上的输出与光谱传感器所在中心处的输出进行比较。如果相机确定在横跨宽度上作物具有相似的健康状况(例如,由颜色所指示的),则由光谱传感器测量的值将应用于整个宽度。这是基于附加传感器或检测器来推断光谱传感器响应的示例,如在框434所指示的。然而,如果相机检测到比光谱传感器的位置有更多或更少绿色的区域,则可以基于差异来上下调整由光谱传感器获取的(一个或多个)值。然后将经调整的值提供给施用器以向植物提供(一种或多种)必需的养料。因此,可以使用相对低成本的传感器部件来进行非常精确的养料施用。
40.如图8所示,可以使用的附加传感器的其他示例是生物量传感器426和/或归一化差值植被指数(ndvi)传感器430。当光谱传感器信号与生物量传感器信号426联接时,生物量传感器信号426可以被用于确定存在的作物(生物量)的量,并且光谱传感器信号可以量化该作物中的养料水平。综合起来,这两种输入可以被用于准确地预测使作物中的产量和蛋白质最大化所需的养料的量。
41.也可以使用其他类型的传感器和信息,如框432所指示的。作为其他信息的示例,
从空中无人机或卫星获取的图像可以用于将田地划分为相对植物健康的不同区。然后,当养料施用器与光谱传感器一起移动穿过田地时,它将量化每个区的养料水平,并且然后对每个区施用适当的比率。
42.可以理解的是,使用(一个或多个)附加传感器可以有利于对基于光谱测量的养料输送的智能调整。在一些示例中,基于横跨施用器的宽度获取的图像和/或来自有人或无人驾驶的航空系统/卫星的图像来推断必需的养料水平。然而,实施例还可以使用附加传感器/信息来确定在施用器下方的田地部分具有很少的作物或没有作物。在这些情况下,施用器可以防止输送过量的养料,因为过量的养料只会被简单地浪费掉、或以对植物有毒的水平被施用。这有助于在没有作物的区域不需要施用养料,从而节省投入成本并且保护环境。它还可以通过指定具有很少作物或没有作物的区域以便可以忽略光谱传感器在这些区域中的输出来提供帮助。
43.图9是根据一个实施例的测量活作物中的养料水平的方法的流程图。方法450开始于框452,在框452处,红外光照(近红外、中红外或两者)被引导至活作物并获取反射信号。虽然这可以使用位于养料施用器之上或下方的呈现组件来实现,但也可以单独使用被拖动或被以其他方式传送通过活作物的呈现组件来实现。例如,在图3a所示的呈现组件可以被简单地拖动通过作物。在另一示例中,呈现组件可以形成被命令或被以其他方式编程以穿过作物来侦察养料水平的自主车辆的一部分。
44.接下来,在框454处,使用反射信号来计算活作物中的一个或多个养料水平。在这样做时,使用红外反射信号的已知校准或特性来确定与养料相关的物质水平。与养料相关的物质水平的示例包括但不限于:氮456、水分458、钾460、蛋白质462、磷464、硫466和钙468。
45.接下来,在框470处,确定呈现系统和/或植物的位置。这可以使用合适的位置检测系统来完成,例如位置检测系统406(如图7所示)。接下来,在框472处,存储测量到的养料水平474和位置476。优选地,还存储测量的时刻/日期478。这样的存储可以在本地数据存储装置中、在远程数据存储装置中、或者在两者中。这些存储的数据随后可以用于为农业决策(诸如,向活作物施用养料、以及施用此类养料的方式(例如,侧面施肥或顶部施肥))提供信息。
46.本讨论已经提到了处理器和服务器。在一个实施例中,处理器和服务器包括具有相关联的存储器和定时电路(未单独示出)的计算机处理器。处理器和服务器是该处理器和服务器所属的系统或设备的功能部分,并且由这些系统中的其他部件或项目激活并促进该部件或项目的功能。
47.还讨论了许多数据存储装置。应当注意的是,所述数据存储装置可以分别分成多个数据存储装置。对于访问该数据存储装置的系统来说,所有的数据存储装置可以是本地的,所有的数据存储装置可以是远程的,或者一些数据存储装置可以是本地的、而其他的数据存储装置是远程的。本文考虑了所有这些配置。
48.此外,附图示出了多个框,其中功能被赋予到每个框。应当注意的是,可以使用更少的框,因此由更少的部件来执行功能。而且,可以使用更多的框,其中功能分布在更多的部件中。
49.应当注意的是,上述讨论已经描述了各种不同的系统、部件和/或逻辑。应当理解
的是,这样的系统、部件和/或逻辑可以由执行与那些系统、部件和/或逻辑相关联的功能的硬件项目(诸如,处理器和相关联的存储器或其他处理部件,其中的一些在下面描述)构成。此外,所述系统、部件和/或逻辑可以由加载到存储器中并随后由处理器或服务器或其他计算部件运行的软件来构成,如下所述。所述系统、部件和/或逻辑也可以由硬件、软件、固件等的不同组合来构成,在下面描述其中的一些示例。这些仅是可以用于形成以上描述的系统、部件和/或逻辑的不同结构的一些示例。也可以使用其他结构。
50.图10是在图1中示出的农业养料施用器100的框图,除了该农业养料施用器100与远程服务器架构500中的元件通信之外。在示例实施例中,远程服务器架构500可以提供计算服务、软件服务、数据访问服务和存储服务,这些服务不需要终端用户了解递送所述服务的系统的物理位置或配置。在多种不同的实施例中,远程服务器可以使用适当的协议通过广域网(诸如,互联网)递送所述服务。例如,远程服务器可以通过广域网递送应用,并且远程服务器可以通过网络浏览器或任何其他计算部件被访问。图1中示出的软件或部件以及对应的数据可以存储在远程位置处的服务器上。远程服务器环境中的计算资源可以被合并在远程数据中心位置处,或者该计算资源可以是分散的。远程服务器基础设施可以通过共享数据中心来递送服务,即使该远程服务器基础设施作为用户的单个访问点来出现。因此,可以使用远程服务器架构从远程位置处的远程服务器提供本文描述的部件和功能。替代性地,可以从常规服务器提供所述部件和功能,或者所述部件和功能可以直接或以其他方式安装在客户端设备上。
51.图10描绘了采用远程服务器架构的另一实施例。图10示出了还考虑图7的一些元件设置在远程服务器位置502处,而其他元件不设置在该远程服务器位置处。通过示例的方式,养料信息数据存储装置111可以位于在云中示意性示出的位置502处。明确考虑了基于云的养料信息数据存储装置111可以位于单个位置,或者被拆分或以其他方式分散在多个物理位置。无论它们位于何处,它们可以由施用器控制系统400通过网络(广域网或局域网)直接访问,它们可以通过服务被托管在远程站点,或者它们可以作为服务被提供,或者被驻留在远程位置的连接服务访问。此外,数据基本上可以存储在任何位置,并且该数据可以由相关方间歇性地访问或被转发给相关方。例如,可以使用物理载体来代替电磁波载体,或者除了电磁波载体之外还使用物理载体。在这样的实施例中,在蜂窝覆盖较差或不存在的情况下,另一移动机器(诸如,燃料车或肥料运输车辆)可以具有自动信息收集系统。当施用器靠近燃料车以加燃料时,系统使用任何类型的临时无线连接来自动地从施用器收集信息。当燃料车到达存在蜂窝覆盖(或其他无线覆盖)的位置时,被收集的信息然后可以被转发到主网络。例如,燃料车可以在进行到为其他机器加燃料时或在主要燃料储存位置处时进入被覆盖的位置。在本文中考虑了所有这些架构。此外,信息可以存储在施用器上,直到该施用器进入被覆盖的位置。
52.图11是其中可以部署(例如)图7的元件或其部分元件的计算环境的一个示例。参考图11,用于实施一些实施例的示例性系统包括呈计算机810形式的通用计算设备。计算机810的部件可以包括但不限于:处理单元820(该处理单元820可以包括处理器108)、系统存储器830、和将包括系统存储器的各种系统部件联接到处理单元820的系统总线821。系统总线821可以是几种类型的总线结构中的任何一种,包括存储器总线或存储器控制器、外围总线以及使用各种总线架构中的任何一种的局部总线。关于图7描述的存储器和程序可以被
部署在图11的相对应部分中。
53.计算机810通常包括各种计算机可读介质。计算机可读介质可以是可以由计算机810访问的任何可用介质,并且包括易失性和非易失性介质、可移动和不可移动介质。作为示例而非限制,计算机可读介质可以包括计算机存储介质和通信介质。计算机存储介质不同于调制数据信号或载波,并且也不包括调制数据信号或载波。计算机可读介质包括硬件存储介质,所述硬件存储介质包括以任何方法或技术实施用于存储诸如计算机可读指令、数据结构、程序模块或其他数据的信息的易失性和非易失性、可移动和不可移动介质。计算机存储介质包括但不限于:ram、rom、eeprom、闪存或其他存储器技术、cd-rom、数字多功能盘(dvd)或其他光盘存储装置、盒式磁带、磁带、磁盘存储装置或其他磁存储设备,或可以用于存储所期望的信息并可以由计算机810访问的任何其他介质。通信介质可以实现计算机可读指令、数据结构、程序模块或传送机构中的其他数据,并且包括任何信息递送介质。术语“调制数据信号”是指具有以在信号中编码信息的方式设置或改变其特性中的一个或多个的信号。
54.系统存储器830包括易失性和/或非易失性存储器形式的计算机存储介质,诸如只读存储器(rom)831和随机存取存储器(ram)832。基本输入/输出系统833(bios)(其包含诸如在启动期间帮助在计算机810内的元件之间传递信息的基本例程)通常被存储在rom 831中。ram 832通常包含处理单元820可立即访问和/或当前正在被处理单元820操作的数据和/或程序模块。作为示例而非限制,图11示出了操作系统834、应用程序835、其他程序模块836和程序数据837。
55.计算机810还可以包括其他可移动/不可移动的易失性/非易失性计算机存储介质。仅作为示例,图11示出了从不可移动的非易失性磁介质、磁盘驱动器851、非易失性磁盘852、光盘驱动器855和非易失性光盘856读取或向它们写入的硬盘驱动器841。硬盘驱动器841通常通过不可移动存储器接口(诸如,接口840)连接到系统总线821,并且磁盘驱动器851和光盘驱动器855通常通过可移动存储器接口(诸如,接口850)连接到系统总线821。
56.替代性地或附加地,本文描述的功能可以至少部分地由一个或多个硬件逻辑部件来执行。例如但不限于,可以使用的示意性类型的硬件逻辑部件,包括现场可编程门阵列(fpga)、专用程序集成电路(例如,asic)、专用程序标准产品(例如,assp)、单芯片系统(soc)、复杂可编程逻辑器件(cpld)等。
57.上文讨论并在图11中示出的驱动器及其相关联的计算机存储介质为计算机810提供了计算机可读指令、数据结构、程序模块和其他数据的存储。例如,在图11中,硬盘驱动器841被示为存储操作系统844、应用程序845、其他程序模块846和程序数据847。注意,这些部件可以与操作系统834、应用程序835、其他程序模块836和程序数据837相同或不同。
58.用户可以通过输入设备(诸如,键盘862、麦克风863和指向设备861(诸如,鼠标、追踪球或触摸板))向计算机810输入命令和信息。其他输入设备(未示出)可以包括操纵杆、游戏手柄、碟形卫星天线(satellite dish)、扫描仪等。这些和其他输入设备通常通过联接到系统总线的用户输入接口860连接到处理单元820,但是也可以通过其他接口和总线结构连接。视觉显示器891或其他类型的显示设备也通过诸如视频接口890的接口而连接到系统总线821。除了监视器之外,计算机还可以包括可以通过输出外围接口895而被连接的其他外围输出设备,诸如扬声器897和打印机896。
59.计算机810在使用到一个或多个远程计算机(诸如远程计算机880)的逻辑连接(诸如,局域网(lan)或广域网(wan))的联网环境中运行。
60.当在lan联网环境中使用时,计算机810通过网络接口或适配器870连接到lan871。当在wan联网环境中使用时,计算机810通常包括调制解调器872或用于通过wan873(诸如,因特网)建立通信的其他装置。在联网环境中,程序模块可以被存储在远程存储器存储设备中。例如,图11示出了远程应用程序885可以驻留在远程计算机880上。
61.还应当注意的是,本文描述的不同实施例可以以不同的方式组合。也就是说,一个或多个实施例的部分可以与一个或多个其他实施例的部分组合。在本文中考虑了这方面的全部。
62.示例1是一种农业养料施用器,所述农业养料施用器包括容器和养料分配组件,所述养料分配组件能够操作地联接到所述容器以从所述容器输送养料。提供光谱反射(nir)作物感测系统,所述光谱反射作物感测系统包括光学窗口。呈现组件被安装到所述农业养料施用器,并且被配置为在所述农业养料施用器移动时将田地中的活植物定位成靠近所述光谱反射作物感测系统的所述光学窗口。控制器联接到所述光谱反射作物感测系统和所述养料分配组件。所述控制器被配置为从所述光谱反射作物感测系统获取指示所述活植物中测量到的养料水平的信息、并且基于所述测量到的养料水平和一目标养料水平来确定补救养料量。所述控制器基于所述补救养料量来控制所述养料分配组件。
63.示例2是任何或所有先前示例的农业养料施用器,其中,所述光谱反射作物感测系统被配置为生成具有介于800纳米与2500纳米之间的波长的光照,所生成的光照穿过所述光学窗口并且从所述活植物反射以提供指示所述测量的养料水平的nir响应。
64.示例3是任何或所有先前示例的农业养料施用器,其中,所述光谱反射作物感测系统被配置为生成具有介于2500纳米与8000纳米之间的波长的光照,所生成的光照穿过所述光学窗口并且从所述活植物反射以提供指示所述测量到的养料水平的响应。
65.示例4是任何或所有先前示例的农业养料施用器,其中,所述呈现组件包括被配置为在所述活植物上方滑动的底部表面,所述底部表面具有设置在所述光学窗口附近的孔。
66.示例5是任何或所有先前示例的农业养料施用器,其中,所述呈现组件包括渐缩的前缘。
67.示例6是任何或所有先前示例的农业养料施用器,其中,所述呈现组件包括被配置为将所述活植物朝向所述孔移动的表面轮廓。
68.示例7是任何或所有先前示例的农业养料施用器,其中,所述呈现组件包括不透明的窗帘以阻挡环境光。
69.示例8是任何或所有先前示例的农业养料施用器,其中,自动高度控制系统控制所述呈现组件的高度以在不损伤所述活植物的情况下提供合适的反射信号。
70.示例9是任何或所有先前示例的农业养料施用器,其中,所述呈现组件包括平行布置的多个浮筒状结构,并且其中所述光谱反射作物感测系统设置在所述多个浮筒状结构之间。
71.示例10是任何或所有先前示例的农业养料施用器,其中,所述光谱反射作物感测系统被设置为观察所述活植物的下部部分。
72.示例11是任何或所有先前示例的农业养料施用器,其中,所述呈现组件包括传送
器,所述传送器被配置为将所述活植物移动经过所述光谱反射作物感测系统的所述光学窗口。
73.示例12是任何或所有先前示例的农业养料施用器,其中,所述传送器被配置为将所述活植物选择性地偏置抵靠于所述光学窗口。
74.示例13是任何或所有先前示例的农业养料施用器,其中,所述呈现组件包括多个茎秆提升器。
75.示例14是任何或所有先前示例的农业养料施用器,其中,所述呈现组件能够选择性地部署在所述农业养料施用器下方。
76.示例15是任何或所有先前示例的农业养料施用器,并且进一步包括第二光谱反射作物感测系统。
77.示例16是任何或所有先前示例的农业养料施用器,并且进一步包括附加传感器,所述附加传感器能够操作地联接到所述控制器,所述控制器适于使用来自所述附加传感器的信号以基于所述附加传感器信号来修改所述补救养料量。
78.示例17是一种向田地中的农业植物提供养料的方法。所述方法包括:当所述植物在所述田地中时将红外光照引导至所述植物,并且获取反射响应信号;基于所述反射响应信号来确定所述植物中测量到的养料水平;将所述测量到的养料水平与一目标水平进行比较以确定补救养料水平;以及将所述补救养料水平施用于所述植物。
79.示例18是任何或所有先前示例的向农业植物提供养料的方法,其中,使用相对于所述植物移动的农业养料施用器的呈现组件来执行将红外光照引导至所述植物。
80.示例19是任何或所有先前示例的向农业植物提供养料的方法,其中,所述养料选自由水分、氮、钾、蛋白质、磷、硫和钙组成的组。
81.示例20是任何或所有先前示例的向农业植物提供养料的方法,并且进一步包括获取附加传感器信息以调整所述补救养料水平。
82.示例21是任何或所有先前示例的向农业植物提供养料的方法,其中,所述附加传感器信息指示横跨农业养料施用器的宽度的植物的状况,其中红外作物感测系统被设置在所述农业养料施用器的底盘下方,并且其中所述农业养料施用器的控制器被配置为将所述红外作物感测系统所在位置处的所述附加传感器信息与所述反射响应信号相关联,以推断用于横跨所述农业养料施用器的所述宽度的其他位置的调整后的补救量。
83.示例22是测量田地中的农业植物的养料的方法。所述方法包括:当所述植物在所述田地中时将红外光照引导至所述植物,并且获取反射响应信号;基于所述反射响应信号来确定所述植物中测量到的养料水平;确定所述植物的位置;以及将所述测量到的养料水平和位置存储在数据存储装置中。
84.尽管已经用特定于结构特征和/或方法动作的语言描述了主题,但是应当理解的是,在所附权利要求中限定的主题不必限于以上描述的具体特征或动作。相反,以上描述的具体特征和动作是作为实施权利要求的示例形式而被公开的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1