全流程自动化植树方法
1.本发明涉及树苗自动种植技术领域,特别是一种全流程自动化植树方法。
背景技术:
2.为了全面贯彻“绿水青山就是金山银山”的生态理念,近年来,我国的植树造林运动正在逐年加速推进。一方面,植树造林对于防风固沙、调节气候、涵养水源、减轻大气污染具有重要意义,另一方面,由植树造林催生的林下经济,成为人民致富增收的新途径。
3.传统的人工植树费时费力,效率低下,农林种植机械的出现,一定程度上解放了劳力,开沟挖坑器能够实现自动开沟作业,解决了植树最耗时费力的环节,但是现有设备集成度不高、自动化程度较低,多多少少还需要人工参与,整体的植树效率有待提高。
技术实现要素:
4.本发明的目的是克服现有技术的不足,而提供一种全流程自动化植树方法,它应用于植树机器人,解决了目前用于植树的农林种植机械自动化程度较低,植树效率不高的问题。
5.本发明的技术方案是:全流程自动化植树方法,应用于植树机器人;所述植树机器人,包括可移动机架、浇水机构、钻坑机构、抓持机构、培土机构和夯土机构;可移动机架包括底座、树苗安置箱和水箱;底座前端中心区域设有用于安装钻坑机构的安装区间c,底座后端两侧分别设有框架a和框架b,框架a内部上端设有顶壁a,框架a内部下端设有支承杆a,框架b的内部上端设有顶壁b,框架b的内部下端设有支承杆b;框架a的正上方设有用于安装树苗安置箱的安装区间a,框架b的正上方设有用于安装抓持机构的安装区间b,底座在安装区间a和安装区间b之间设有连通至地面的操作区间,底座下端活动安装有多个滚轮,滚轮为底座提供移动支持;树苗安置箱安装在框架a上端,并位于安装区间a内,其在朝向安装区间b的一侧设有可供树苗取拿及存入的敞口;树苗安置箱内从上至下设有多个安置架,通过安置架将树苗安置箱内分隔为多层;安置架包括多根隔条和多个定位座;所有的隔条水平、等高、间隔、平行布置,隔条一端固定连接在树苗安置箱的内壁上,隔条的另一端向树苗安置箱的敞口延伸,相邻的隔条之间设有供机械爪水平移动的条形间隙;定位座上端设有u形卡口,定位座采用相同的布局方式安装在每一根隔条上,以使每根隔条上相同位置的定位座形成一行定位座,一行定位座中所有的定位座的u形卡口均相互正对,而形成一条连续的树苗放置槽,树苗安置槽可供树苗水平放置;水箱固定安装在底座中部,其上端设有补水口,下端设有排水口;浇水机构包括水泵、电磁阀、流量计和水路管道;水路管道的前端连接在水箱的排水口上,水路管道的后端朝向操作区间下方布置;水泵、电磁阀和流量计均安装在水路管道上,水泵用于驱动水路管道内的水从水路管道的前端向后端流动,电磁阀用于控制水路管道内的水流通断,流量计用于计量水路管道内单位时间的水流量;
钻坑机构设置在底座的安装区间c内,其用于向正下方土壤钻进用于容纳树苗根部的坑;钻坑机构包括支承架、三层活动架、电机a、钻头及气缸b;支承架包括从下至上依次固定连接的底板、导向杆和顶板,底板固定安装在底座上,并位于安装区间c的下端,底板上设有供钻头升降通过的穿行孔,导向杆的数量有多根,所有的导向杆绕穿行孔呈环形均布,导向杆下端固连在底板上表面边缘处,导向杆上端固连在顶板下表面板边缘处;三层活动架滑动安装在导向杆上,并位于顶板与底板之间,三层活动架包括上板、中板、下板、连接杆和减震组件;上板、中板、下板从上至下依次正对布置并与导向杆滑动配合,连接杆固定连接在上板与中板之间,减震组件设置在中板与下板之间;电机a固定安装在上板上,电机a的机轴穿过上板竖直向下伸出;钻头包括钻杆和固定连接在钻杆上的螺旋刀片,钻杆上端依次通过设在上板中心处的轴承座、中板、设在中板与上板之间的联轴器,与电机a的机轴连接,钻杆下端穿过底板的穿行孔而伸入底板下端;气缸b安装在顶板上,其活塞杆竖直向下伸出,并与中板固定连接,气缸b的活塞杆伸缩带动三层活动架沿着导向杆做竖直方向的往复直线移动;抓持机构安装在框架b上端,并位于安装区间b内,其用于从树苗安置箱内抓取树苗,并将树苗在操作区间内调整姿态和下放;抓持机构包括升降移动组件和机械爪组件;升降移动组件包括支架、电机b、丝杆和螺母b;支架固定安装在框架b上端,并位于安装区间b的下端;电机b固定安装在支架上端,电机b的机轴竖直向下伸出;丝杆竖直布置并可转动安装在支架上,丝杆在上端通过联轴器与电机b的机轴连接;螺母b螺纹连接在丝杆上,并与导向杆b滑动套装配合;机械爪组价包括电动推杆b、旋转单元和机械爪;电动推杆b的外壳固定连接在螺母b上,电动推杆b的伸缩杆向树苗安置箱的敞口水平伸出;机械爪包括基座、半边爪、齿轮a、齿轮b和电机c;两个半边爪相对布置并分别通过转轴可转动安装在基座上,两个半边爪在内侧合围形成抓握孔;齿轮a和齿轮b分别安装在两根转轴的端部,并相互啮合;电机c固定安装在基座上,电机c的机轴与其中一根转轴连接,电机c的机轴转动以驱动两个半边爪同步背向转动或同步相向转动;旋转单元安装在电动推杆b的活塞杆与基座之间,为机械爪提供竖直平面内的转动支持;两组培土机构对称分别设置在框架a和框架b内,并相对于操作区间对称布置,其用于将操作区间下端两侧的土壤向操作区间下端中心区域推拢;培土机构包括电动推杆a和铰接在电动推杆a的伸缩杆端部的培土板;两组培土机构的电动推杆a分别铰接安装在顶壁a和顶壁b上,并分别朝向操作区间的斜下方倾斜布置,并分别倚靠在框架a的支承杆a和框架b的支承杆b上,电动推杆a的伸缩杆伸缩以使培土板的下端接触或离开地面;培土板朝向操作区间的一侧表面为正面,背向操作区间的一侧表面为背面,培土板与电动推杆a的伸缩杆的铰接处位于培土板背面中心处;两组培土机构的培土板分别伸出在框架a的下端和框架b的下端,并相对于操作区间对称布置;两组夯土机构分别设置在框架a和框架b上,并位于两组培土机构之间,并相对于操作区间对称布置;夯土机构包括气缸a和固定连接在气缸a的活塞杆端部的半环形板,半环形板的两侧分别设有内弧弯和外弧边;两组夯土机构的气缸a的缸体分别固定安装在框架a和框架b相对的两侧面上,两组夯土机构的气缸a的活塞杆均向下伸出,气缸a的活塞杆伸缩以驱动半环形板接触或离开地面;两组夯土机构的半环形板的内弧弯相对布置,并合围形成可供树苗主干穿过的避让通道,避让通道位于操作区间的下端中心处;
执行植树操作之前,植树机器人处于初始状态,在初始状态下:a、水泵和电磁阀处于关闭状态;b、气缸b的活塞杆处于缩回状态,以使三层活动架处于其运动行程的最上端;c、旋转单元驱动机械爪转动至水平状态,机械爪的两个半边爪合拢;d、电动推杆a的伸缩杆处于缩回状态,以使培土板离开地面;e、气缸a的活塞杆处于缩回状态,以使半环形板离开地面;植树方法如下:s01,挖坑:a、将植树机器人移动到植树区域,并确保穿行孔位于待挖坑区域的正上方,然后同时执行以下两项操作:1、所有的气缸b的活塞杆同步伸出,驱动三层活动架向下移动,进而带动钻头通过穿行孔向下移动,此过程中,通过钻头向下移动提供向土壤下方钻进的动力;2、电机a启动,驱动钻头旋转,通过螺旋刀片切削土壤并将切削下来的土壤带出到坑外部;b、挖坑深度达到要求后,电机a停止动作,使钻头停止旋转,然后所有的气缸b的活塞杆同步缩回,驱动三层活动架向上移动,恢复到初始状态;s02,抓取树苗:a、驱动植树机器人向前移动,使操作区间移动至所挖坑的正上方;b、电机b启动,驱动机械爪组件沿丝杆做升降移动,移动至与树苗安置箱内放有树苗的目标层所在高度齐平;c、电机c启动,通过齿轮a和齿轮b的啮合关系,驱动两个半边爪背向转动张开,张开的开度以树苗主干能被容纳为准;d、电动推杆b的伸缩杆伸出,使机械爪通过树苗安置箱的敞口伸入目标层对应的安置架的条形间隙中,当树苗主干进入机械爪的两个半边爪之间时,电动推杆b停止动作;e、电机c启动,通过齿轮a和齿轮b的啮合关系,驱动两个半边爪相向转动而闭合,从而将树苗主干夹持在两个半边爪内侧的抓握孔中;s03,将树苗转移至坑中:a、电机b启动,驱动机械爪组件和树苗上抬一定距离,抬升高度以树苗和机械爪组件的后续水平移动时,不与树苗安置箱之间产生干涉为准;b、电动推杆b的活塞杆缩回,使机械爪和树苗从树苗安置箱的敞口退出,当机械爪退出到操作区间的中心区域时,电动推杆b停止动作;c、旋转单元启动,驱动机械爪连同树苗旋转90
°
,使树苗从水平状态旋转为竖直状态,并且树根朝下,此时,树苗位于操作区间的中心区域,并位于所挖坑的正上方;d、电机b启动,驱动机械爪组件和树苗向下移动,当移动至极限位置或树根进入坑中时,电机b停止动作;e、电机c启动,通过齿轮a和齿轮b的啮合关系,驱动两个半边爪背向转动而张开,树苗主干随即脱离机械爪组件的夹持而落入坑中;s04,培土:两组培土机构的电动推杆a的伸缩杆同步伸出,驱动两块培土板同步向操作区间的下方中心区域伸出,通过培土板下边沿的顶推坑外侧的土壤,将坑外侧的土壤推入坑中;
培土完成后,两组培土机构的电动推杆a的伸缩杆同步缩回,使两块培土板离开地面;s05,夯土:两组夯土机构的气缸a的活塞杆同步伸出,使两块半环形板同步向下移动,一方面,两块半环形板下移的过程中,避让通道逐渐收拢,对树苗主干起到限位和纠偏的作用,另一方面,两块半环形板下移的过程中,对坑中土壤起到夯实的作用;夯土完成后,两组夯土机构的气缸a同步缩回,使两块半环形板离开地面;s06,浇水:电磁阀打开,水泵启动,使水箱中的水依次通过水箱的排水口和水路管道的前端口进入水路管道中,再通过水路管道的后端口排出,对操作区间下端的土壤浇水,浇灌一定时间或浇灌一定水量后,水泵和电磁阀自动关闭。
6.本发明进一步的技术方案是:减震组件的数量至少有三组,所有组的减震组件绕钻杆呈环形均布;减震组件包括螺栓、螺母a和弹簧;螺栓杆部依次穿过中板和下板,而伸出在下板下端,螺栓头部位于中板上端;螺母a螺纹连接在螺栓杆部,并位于下板下端;弹簧套装在螺栓杆部上,并压缩设置在中板与下板之间,弹簧通过弹力迫使中板向上压紧螺栓头部,迫使下板向下压紧螺母a。
7.本发明更进一步的技术方案是:气缸b的数量至少有三个,所有的气缸b均连接在顶板边缘处,并绕钻杆呈环形均布;相应的,上板的边缘处呈环形均布有多个避让缺口,每个避让缺口供一个气缸b穿过;相应的,气缸b的活塞杆与下板的连接位置位于下板边缘处。
8.本发明与现有技术相比具有如下优点:1、实现了全流程自动化的植树操作,相比现有的农林种植机械,极大的减轻了操作人员的工作量,提升了植树效率。
9.2、钻头钻进时产生的冲击力传递至下板和中板,通过减震组件的缓冲作用抵消大部分冲击力,传递至上板上的冲击力仅剩小部分,从而对电机a(电机a安装在上板上)和气缸b(气缸b的活塞杆端头连接在上板上)起到保护作用。
10.3、两组夯土机构的半环形板的内弧弯相对布置,合围形成可供树苗主干穿过的避让通道,两组夯土机构的两个气缸a的活塞杆分别向缺口下端中心区域倾斜伸出。基于上述结构,夯土时,一方面,随着两块半环形板的同步下移,避让通道逐渐收拢,对树苗主干起到限位和纠偏的作用,另一方面,夯土区域呈环形,兼顾了夯实土壤的效果和保持树根透气的效果。
11.4、树苗安置箱内通过上下布置的安置架分为多层,每个安置架上可水平放置多株树苗,充分利用了树苗安置箱的内部空间;每个安置架上均设有供机械爪水平移动的条形间隙,充分考虑了机械爪的操作便利性。
12.5、抓持机构的动作方式灵活多样,可充分满足树苗的抓取、调整位姿、下放的要求。其中,电机c用于驱动机械爪的开合,以满足夹取或放松树苗的功能需求;旋转单元用于驱动机械爪在竖直面上旋转,以满足树苗从水平状态变为竖直状态的姿态调整需求;电动推杆b用于驱动机械爪水平移动,电机b用于驱动机械爪竖直移动,两者共同满足了机械爪的空间移动需求。
13.6、底座通过前端、中部、后端三段式区域划分,合理规划了其它各功能部件或各功能机构的安装区域。将重量最重的水箱的规划安装在底座中部,使植树机器人的重心相对
靠近底座中部,有利于保持植树机器人整体的稳定性。将钻坑机构规划安装在底座前端中心处,一方面可借助设在底座下前端两侧的两个减震器减缓钻坑机构工作时的震动,另一方面可与设在底座后端中心区域的操作区间形成前后对应关系,基于该前后对应关系,钻坑机构完成挖坑后,底座向前端直线移动一定距离即可使操作区间与钻坑机构所挖坑对应,两个操作的动作流畅、简洁、可控。将树苗安置箱和抓持机构规划安装在操作区间的两侧的框架a和框架b上,使“从树苗安置箱内抓取树苗—将树苗移出树苗安置箱—将树苗调整为竖直状态-将树苗下放至操作区间的下端”这一连串操作的动作流畅、简洁、可控。
14.以下结合图和实施例对本发明作进一步描述。
附图说明
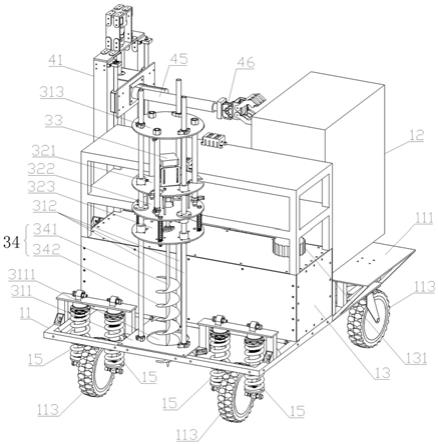
15.图1为植树机器人的结构示意图;图2为可移动机架在一种视角下的结构示意图;图3为可移动机架在另一视角下的结构示意图;图4为为钻坑机构的结构示意图;图5为抓持机构的结构示意图;图6为培土机构和夯土机构在底座上的安装位置示意图;图7为植树方法s01步骤a分步骤结束时的状态图;图8为植树方法s02步骤d分步骤结束时的状态图;图9为植树方法s03步骤b分步骤结束时的状态图;图10为植树方法s03步骤e分步骤结束时的状态图;图11为植树方法s04步骤结束时的状态图;图12为植树方法s05步骤结束时的状态图。
具体实施方式
16.实施例1:如图1-6所示,植树机器人,包括可移动机架、浇水机构、钻坑机构、抓持机构、培土机构和夯土机构。
17.可移动机架包括底座11、树苗安置箱12和水箱13。底座11前端中心区域设有用于安装钻坑机构的安装区间c,底座11后端两侧分别设有框架a111和框架b112,框架a111内部上端设有顶壁a,框架a111内部下端设有支承杆a1112,框架b112的内部上端设有顶壁b,框架b112的内部下端设有支承杆b1122。框架a111的正上方设有用于安装树苗安置箱的安装区间a,框架b112的正上方设有用于安装抓持机构的安装区间b,底座11在安装区间a和安装区间b之间设有连通至地面的操作区间,底座11下端活动安装有多个滚轮113,滚轮113为底座11提供移动支持。树苗安置箱12安装在框架a111上端,并位于安装区间a内,其在朝向安装区间b的一侧设有可供树苗取拿及存入的敞口121。树苗安置箱12内从上至下设有多个安置架,通过安置架将树苗安置箱12内分隔为多层。安置架包括多根隔条122和多个定位座123。所有的隔条122水平、等高、间隔、平行布置,隔条122一端固定连接在树苗安置箱12的内壁上,隔条122的另一端向树苗安置箱12的敞口延伸,相邻的隔条122之间设有供机械爪水平移动的条形间隙。定位座123上端设有u形卡口,定位座123采用相同的布局方式安装在
每一根隔条122上,以使每根隔条122上相同位置的定位座123形成一行定位座,一行定位座中所有的定位座123的u形卡口均相互正对,而形成一条连续的树苗放置槽,树苗安置槽可供树苗水平放置。水箱13固定安装在底座11中部,其上端设有补水口131,下端设有排水口(图中未示出)。
18.浇水机构包括水泵(图中未示出)、电磁阀(图中未示出)、流量计(图中未示出)和水路管道(图中未示出)。水路管道的前端连接在水箱13的排水口上,水路管道的后端朝向操作区间下方布置。水泵、电磁阀和流量计均安装在水路管道上,水泵用于驱动水路管道内的水从水路管道的前端向后端流动,电磁阀用于控制水路管道内的水流通断,流量计用于计量水路管道内单位时间的水流量。
19.钻坑机构设置在底座11的安装区间c内,其用于向正下方土壤钻进用于容纳树苗根部的坑。钻坑机构包括支承架、三层活动架、电机a33、钻头34及气缸b35。支承架包括从下至上依次固定连接的底板311、导向杆312和顶板313,底板311固定安装在底座11上,并位于安装区间c的下端,底板311上设有供钻头升降通过的穿行孔3111,导向杆312的数量有多根,所有的导向杆312绕穿行孔3111呈环形均布,导向杆312下端固连在底板311上表面边缘处,导向杆312上端固连在顶板313下表面板边缘处。三层活动架滑动安装在导向杆312上,并位于顶板313与底板311之间,三层活动架包括上板321、中板322、下板323、连接杆324和减震组件。上板321、中板322、下板323从上至下依次正对布置并与导向杆312滑动配合,连接杆324固定连接在上板321与中板322之间,减震组件设置在中板322与下板323之间。电机a33固定安装在上板321上,电机a33的机轴穿过上板321竖直向下伸出。钻头34包括钻杆341和固定连接在钻杆341上的螺旋刀片342,钻杆341上端依次通过设在上板321中心处的轴承座、中板322、设在中板322与上板323之间的联轴器,与电机a33的机轴连接,钻杆341下端穿过底板311的穿行孔3111而伸入底板311下端。气缸b35安装在顶板313上,其活塞杆竖直向下伸出,并与中板322固定连接,气缸b35的活塞杆伸缩带动三层活动架沿着导向杆312做竖直方向的往复直线移动。
20.抓持机构安装在框架b112上端,并位于安装区间b内,其用于从树苗安置箱12内抓取树苗,并将树苗在操作区间内调整姿态和下放。抓持机构包括升降移动组件和机械爪组件。升降移动组件包括支架41、电机b42、丝杆43和螺母b44。支架41固定安装在框架b112上端,并位于安装区间b的下端。电机b42固定安装在支架41上端,电机b42的机轴竖直向下伸出。丝杆43竖直布置并可转动安装在支架41上,丝杆43在上端通过联轴器与电机b42的机轴连接;螺母b44螺纹连接在丝杆43上,并与导向杆b312滑动套装配合。机械爪组价包括电动推杆b45、旋转单元46和机械爪。电动推杆b45的外壳固定连接在螺母b44上,电动推杆b45的伸缩杆向树苗安置箱12的敞口121水平伸出。机械爪包括基座471、半边爪472、齿轮a473、齿轮b474和电机c475。两个半边爪472相对布置并分别通过转轴可转动安装在基座471上,两个半边爪472在内侧合围形成抓握孔。齿轮a473和齿轮b474分别安装在两根转轴的端部,并相互啮合。电机c475固定安装在基座471上,电机c475的机轴与其中一根转轴连接,电机c475的机轴转动以驱动两个半边爪472同步背向转动或同步相向转动。旋转单元46安装在电动推杆b45的活塞杆与基座471之间,为机械爪提供竖直平面内的转动支持。
21.两组培土机构对称分别设置在框架a111和框架b112内,并相对于操作区间对称布置,其用于将操作区间下端两侧的土壤向操作区间下端中心区域推拢。培土机构包括电动
推杆a51和铰接在电动推杆a51的伸缩杆端部的培土板52。两组培土机构的电动推杆a51分别铰接安装在顶壁a和顶壁b上,并分别朝向操作区间的斜下方倾斜布置,并分别倚靠在框架a111的支承杆a1112和框架b112的支承杆b1122上,电动推杆a51的伸缩杆伸缩以使培土板52的下端接触或离开地面。培土板52朝向操作区间的一侧表面为正面,背向操作区间的一侧表面为背面,培土板52与电动推杆a51的伸缩杆的铰接处位于培土板52背面中心处。两组培土机构的培土板52分别伸出在框架a111的下端和框架b112的下端,并相对于操作区间对称布置。
22.两组夯土机构分别设置在框架a111和框架b112上,并位于两组培土机构之间,并相对于操作区间对称布置。夯土机构包括气缸a61和固定连接在气缸a61的活塞杆端部的半环形板62,半环形板62的两侧分别设有内弧弯和外弧边。两组夯土机构的气缸a61的缸体分别固定安装在框架a111和框架b112相对的两侧面上,两组夯土机构的气缸a61的活塞杆均向下伸出,气缸a61的活塞杆伸缩以驱动半环形板62接触或离开地面。两组夯土机构的半环形板62的内弧弯相对布置,并合围形成可供树苗主干穿过的避让通道63,避让通道63位于操作区间的下端中心处。
23.优选,滚轮14的数量为四个,四个滚轮14分别活动安装在底座11下前端两侧和底座11下后端两侧,其中,设在底座11下前端两侧的两个滚轮14通过减震器15与底座11连接。
24.优选,设在底座11下前端两侧的两个滚轮14为内置轮毂电机的电动滚轮,两个电动滚轮均可独立控制以实现差速转向功能,设在底座11下后端两侧的两个滚轮14为非电动的万向轮。
25.优选,两组夯土机构的气缸a61均相对于竖直面倾斜安装,以使两个气缸a61的活塞杆分别向操作区间下端中心区域倾斜伸出,倾斜角度为3-8
°
。相应的,两组夯土机构的半环形板62相对于水平面呈倾斜布置,半环形板62从外弧边一侧向内弧弯一侧呈向上倾斜的姿态,倾斜角度为3-8
°
。
26.优选,气缸b35的数量至少有三个,所有的气缸b35均连接在顶板313边缘处,并绕钻杆341呈环形均布。相应的,上板323的边缘处呈环形均布有多个避让缺口,每个避让缺口供一个气缸b35穿过;相应的,气缸b35的活塞杆与下板321的连接位置位于下板321边缘处。
27.优选,连接杆324的数量至少有三根,所有的连接杆324绕钻杆341呈环形均布。
28.优选,减震组件的数量至少有三组,所有组的减震组件绕钻杆341呈环形均布。减震组件包括螺栓3251、螺母a3252和弹簧3253。螺栓3251杆部依次穿过中板322和下板321,而伸出在下板321下端,螺栓3251头部位于中板322上端。螺母a3252螺纹连接在螺栓3251杆部,并位于下板321下端。弹簧3253套装在螺栓3251杆部上,并压缩设置在中板322与下板321之间,弹簧3253通过弹力迫使中板322向上压紧螺栓3251头部,迫使下板321向下压紧螺母a3252。
29.优选,电动推杆a51向水平面下方倾斜角度为36
°
。
30.优选,当培土板52脱离地面时,培土板52上端向水平面上方倾斜22
°
。
31.优选,培土板52下端边沿向培土板52正面弯曲。
32.全流程自动化植树方法,应用于上述的植树机器人,执行植树操作之前,植树机器人处于初始状态,在初始状态下:a、水泵和电磁阀处于关闭状态;
b、气缸b35的活塞杆处于缩回状态,以使三层活动架处于其运动行程的最上端;c、旋转单元46驱动机械爪转动至水平状态,机械爪的两个半边爪472合拢;d、电动推杆a51的伸缩杆处于缩回状态,以使培土板52离开地面;e、气缸a61的活塞杆处于缩回状态,以使半环形板62离开地面。
33.植树方法如下:s01,挖坑:a、将植树机器人移动到植树区域,并确保穿行孔3111位于待挖坑区域的正上方,然后同时执行以下两项操作:1、所有的气缸b35的活塞杆同步伸出,驱动三层活动架向下移动,进而带动钻头34通过穿行孔3111向下移动,此过程中,通过钻头34向下移动提供向土壤下方钻进的动力;2、电机a33启动,驱动钻头34旋转,通过螺旋刀片342切削土壤,切削下来的土壤被带出到坑外部;b、挖坑深度达到要求后,电机a33停止动作,使钻头34停止旋转,然后所有的气缸b35的活塞杆同步缩回,驱动三层活动架向上移动,恢复到初始状态。
34.s02,抓取树苗:a、驱动植树机器人向前移动,使操作区间移动至所挖坑的正上方;b、电机b42启动,驱动机械爪组件沿丝杆43做升降移动,移动至与树苗安置箱12内放有树苗的目标层所在高度齐平;c、电机c475启动,通过齿轮a473和齿轮b474的啮合关系,驱动两个半边爪472背向转动张开,张开的开度以树苗主干能被容纳为准;d、电动推杆b45的伸缩杆伸出,使机械爪通过树苗安置箱12的敞口121伸入目标层对应的安置架的条形间隙中,当树苗主干进入机械爪的两个半边爪472之间时,电动推杆b45停止动作;e、电机c475启动,通过齿轮a473和齿轮b474的啮合关系,驱动两个半边爪472相向转动而闭合,从而将树苗主干夹持在两个半边爪472内侧的抓握孔中。
35.s03,将树苗转移至坑中:a、电机b42启动,驱动机械爪组件和树苗上抬一定距离,抬升高度以树苗和机械爪组件的后续水平移动时,不与树苗安置箱12之间产生干涉为准;b、电动推杆b45的活塞杆缩回,使机械爪和树苗从树苗安置箱12的敞口121退出,当机械爪退出到操作区间的中心区域时,电动推杆b45停止动作;c、旋转单元46启动,驱动机械爪连同树苗旋转90
°
,使树苗从水平状态旋转为竖直状态,并且树根朝下,此时,树苗位于操作区间的中心区域,并位于所挖坑的正上方;d、电机b42启动,驱动机械爪组件和树苗向下移动,当移动至极限位置或树根进入坑中时,电机b42停止动作;e、电机c475启动,通过齿轮a473和齿轮b474的啮合关系,驱动两个半边爪472背向转动而张开,树苗主干随即脱离机械爪组件的夹持而落入坑中。
36.s04,培土:两组培土机构的电动推杆a51的伸缩杆同步伸出,驱动两块培土板52同步向操作区间的下方中心区域伸出,通过培土板52下边沿的顶推坑外侧的土壤,将坑外侧的土壤推入坑中;培土完成后,两组培土机构的电动推杆a51的伸缩杆同步缩回,使两块培土板52离
开地面。
37.s05,夯土:两组夯土机构的气缸a61的活塞杆同步伸出,使两块半环形板62同步向下移动,一方面,两块半环形板62下移的过程中,避让通道逐渐收拢,对树苗主干起到限位和纠偏的作用,另一方面,两块半环形板62下移的过程中,对坑中土壤起到夯实的作用;夯土完成后,两组夯土机构的气缸a61同步缩回,使两块半环形板62离开地面。
38.s06,浇水:电磁阀打开,水泵启动,使水箱13中的水依次通过水箱13的排水口和水路管道的前端口进入水路管道中,再通过水路管道的后端口排出,对操作区间下端的土壤浇水,浇灌一定时间或浇灌一定水量后,水泵和电磁阀自动关闭。
39.在上述的植树方法中,植树机器人由单片机(型号为stm32f407)进行控制,单片机与植树机器人中的各需电部件电连接,以控制各部件的运行状态,并采用了uc/os-iii操作系统对植树机器人进行任务管理,使植树机器人能高效率地完成各项任务。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1