一种基于人工智能的水生无脊椎动物自动识别方法与设备与流程
1.本发明涉及人工智能设备技术领域,具体为一种基于人工智能的水生无脊椎动物自动识别方法与设备。
背景技术:
2.水生动物包括有脊椎动物和无脊椎动物。在水下生态环境研究中,记录水下生物的种群类别、种群数量,有助于水下生态状况的研究。随着科技不断发展,智能设备越来越多。通过智能代替研究人员潜入水中,观察记录生物类别。
3.但水生无脊椎动物列如乌贼和鱿鱼,长相极为相似。因此部分智能设备远处观察无法区分,容易识别错误,进而导致记录出现误差,影响到水下生态环境研究,因此需要一种新型设备。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种基于人工智能的水生无脊椎动物自动识别方法与设备,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种基于人工智能的水生无脊椎动物自动识别设备,包括仓体,所述仓体后端设有连接筒,连接筒后端设有套筒,所述仓体外侧绕轴线等角度设有外摄像头,连接筒前后两侧均连接有推进器,推进器用于推动仓体前进,所述仓体外对称连接有辅助组件,辅助组件用于加速仓体前进速度,仓体前端设有开口,开口处对称设有弧板,仓体内设有驱动弧板闭合的驱动器。
8.优选的,所述仓体前后两侧均开设有通槽,通槽与弧板一一对应,所述弧板与通槽滑动配合,所述驱动器包括两个马达、两个支杆,所述马达,支杆分别与通槽一一对应,两个马达分别位于仓体内壁上下两侧,马达传动轴与支杆连接,支杆与弧板连接。
9.优选的,所述仓体内等角度设有多个内摄像头,内摄像头位于相邻两个外摄像头之间,所述辅助组件位于仓体后端,辅助组件包括内部中空的圆柱体、气囊和水泵,圆柱体开设有贯穿的孔洞,圆柱体一端伸入仓体内,圆柱体另一端与气囊进入口连接,水泵与气囊连接,圆柱体内设有螺旋浆和单向阀。
10.优选的,所述螺旋桨由电机驱动,当螺旋桨转动后带动水流进入气囊内,单向阀只允许水流从圆柱体进入气囊内。
11.优选的,所述连接筒内壁绕轴线等角度铰接有铁棒,铁棒一端连接有钢丝,钢丝远离铁棒一端与连接筒内壁连接,所述连接筒表面设有多个电磁铁机构,所述电磁铁机构与铁棒一一对应。
12.优选的,所述连接筒外布置有多个电缆,电缆端部固定安装有gps定位模块。
13.优选的,所述套筒由不透明的橡胶塑料制成,套筒内壁等角度设有多个探头。
14.优选的,所述仓体外设有环圈,环圈内固定安装有控制模块,电池,以及信息记录模块。
15.一种基于人工智能的水生无脊椎动物自动识别方法:
16.步骤一,整个装置沉入海中,外摄像头观察外界情况,推进器趋使整个装置前进,信息记录模块通过外摄像头拍摄的画面记录物种类别。
17.步骤二,当遇到类似鱿鱼、乌贼的无脊椎水下生物,装置慢慢靠近,同时马达带动支杆旋转将两个弧板分离,使得仓体开口露出。
18.步骤三,当仓体开口逐渐靠近无脊椎生物后,圆柱体内螺旋桨旋转并且水泵打开,将水流吸入仓体内,同时仓体快速向前加速,将生物捕获至仓体内,马达驱动弧板快速闭合。
19.步骤四,内摄像头观察仓体内的生物,若胴部形状是袋形,身体宽大,肉鳍在身体两侧直到尾部都有,则判定为乌贼。
20.步骤五,若观察到胴部形状是锥形,身体细长,肉鳍在尾部上呈两片三角状,则判定为鱿鱼。
21.步骤六,观察完毕后,电磁铁机构通电启动产生磁场吸附铁棒,使得套筒与仓体畅通,生物从而套筒游出,由于套筒不透光且鱿鱼带有发光器,因此探头观察生物在昏暗环境下是否发光,进行进一步判断。
22.(三)有益效果
23.本发明提供了一种基于人工智能的水生无脊椎动物自动识别方法与设备。具备以下有益效果:
24.1、该基于人工智能的水生无脊椎动物自动识别设备,通过仓体,连接筒,套筒,电缆配合模拟呈水下生物,降低生物警惕性,从而便于对水下生物进行观察。通过将无脊椎生物捕捉至仓体内,根据鱿鱼、乌贼身体特征不同,从进行识别区分。代替传统设备进行观察记录,避免由于乌贼、鱿鱼长相相似而导致运距离观察时不能识别,或者识别错误。
附图说明
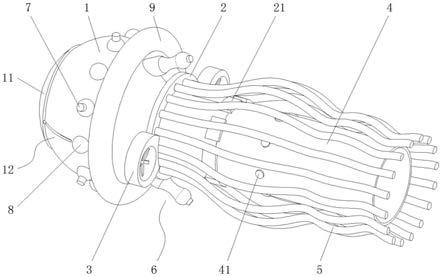
25.图1为本发明结构立体图;
26.图2为本发明结构另一角度示意图;
27.图3为本发明连接筒结构示意图;
28.图4为本发明连接筒内部结构展示图;
29.图5为本发明套筒结构示意图;
30.图6为本发明球型仓内部结构示意图;
31.图7为本发明辅助组件结构示意图。
32.图中:1仓体、11弧板、12通槽、13马达、14支杆、2连接筒、21电磁铁机构、22铁棒、23钢丝、24弹簧、3推进器、4套筒、41探头、5电缆、6辅助组件、61圆柱体、62气囊、63水泵、7外摄像头、8内摄像头、9环圈。
具体实施方式
33.本发明实施例提供一种基于人工智能的水生无脊椎动物自动识别方法与设备,如
图1-7所示,包括仓体1,仓体1后端焊接有连接筒2,连接筒2后端焊接有套筒4。仓体1外侧绕轴线等角度固定安装有外摄像头7,连接筒2前后两侧均固定安装有推进器3,推进器3用于推动仓体1前进。
34.仓体1外对称固定安装有辅助组件6,辅助组件6工作时起到对仓体1前进进行加速的作用。仓体1前端设有开口。开口处对称设有弧板11,仓体1内设有驱动弧板11闭合的驱动器。
35.仓体1前后两侧均开设有通槽12,通槽12与弧板11一一对应,弧板11与通槽12滑动配合。驱动器包括两个马达13、两个支杆14。马达13,支杆14分别与通槽12一一对应。两个马达13分别固定安装在仓体1内壁上下两侧。马达13传动轴与支杆14焊接,支杆14与弧板11焊接。
36.两个马达13朝同一方向转动时,支杆14带动弧板11相互靠近。马达13朝相互远离方向转动时,支杆14带动弧板11相互远离。
37.仓体1内等角度固定安装有多个内摄像头8。内摄像头8位于相邻两个外摄像头7之间,辅助组件6位于仓体1后端。辅助组件6包括内部中空的圆柱体61、气囊62和水泵63,圆柱体61开设有贯穿的孔洞,圆柱体61与仓体1焊接,圆柱体61一端伸入仓体1内。
38.圆柱体61另一端与气囊62进入口连接,水泵63与气囊62连接,圆柱体61内固定安装螺旋浆和单向阀。螺旋桨由电机驱动。当螺旋桨转动后带动水流进入气囊62内,单向阀只允许水流从圆柱体61进入气囊62内。
39.整个装置在推进器3工作下前进,当需要加快前行速度时,螺旋桨旋转且单向阀,水泵63打开,外界水流通过通槽12进入仓体1内。再借助螺旋桨送入气囊内,并从水泵63排出。通过水流排出产生推力达到加速的目的。
40.连接筒2内壁绕轴线等角度铰接有铁棒22,铁棒22一端焊接有钢丝23,钢丝23远离铁棒22一端与连接筒2内壁焊接。钢丝23外设有弹簧24,弹簧24一端与连接筒2内壁焊接,弹簧24另一端与铁棒22焊接。连接筒2表面固定安装有多个电磁铁机构21,电磁铁机构21与铁棒22一一对应。工作时,当电磁铁机构21通电后产生磁场,产生的磁场吸引铁棒22相互远离。此时套筒4与仓体1之间畅通。当电磁铁机构21断电时,弹簧24恢复展开,令铁棒22相互靠近。此时套筒4与仓体1之间通路被封闭。
41.连接筒2外固定安装有多个电缆5,电缆5端部固定安装有gps定位模块。
42.套筒4由不透明的橡胶塑料制成,套筒4内壁等角度固定安装有多个探头41。
43.仓体1外焊接有环圈9,环圈9内固定安装有控制模块,电池,以及信息记录模块。
44.上述电子设备均是常规技术手段,故具体结构,电路布置,型号等与现有技术相同,不作详细描述。
45.结合附图可知,仓体1大致呈球形,整个装置整体呈长条状,通过仓体1,套筒4,电缆5配合伪装成水母的样子。降低生物的警觉性,便于靠近生物。
46.辅助组件6另一作用:乌贼,鱿鱼被捕获后为了逃生会喷出墨汁。此时螺旋桨启动而水泵63关闭,将带有墨汁的海水一同吸入气囊62内。由于单向阀的存在,将墨汁封存在气囊62内。当由猎食动物对装置发动攻击时,水泵63将墨汁喷出迷惑视线,并快速逃离。
47.一种基于人工智能的水生无脊椎动物自动识别方法:
48.步骤一,将整个装置沉入海中,外摄像头7观察外界情况,推进器3趋使整个装置前
进,信息记录模块通过外摄像头7拍摄的画面中捕捉到的水下生物,进行物种类别记录。
49.步骤二,当遇到类似鱿鱼、乌贼的无脊椎水下生物,装置慢慢靠近,同时马达13带动支杆14旋转将两个弧板11分离,使得仓体1开口露出。
50.步骤三,当仓体1开口逐渐靠近无脊椎生物后,圆柱体61内螺旋桨旋转并且水泵63打开,将水流吸入仓体1内。吸入的水流通过水泵63排出。以此产生一定的吸力,同时仓体1快速向前加速,将生物捕获至仓体1内,马达13驱动弧板11快速闭合。
51.步骤四,内摄像头8观察仓体1内的生物,若胴部形状是袋形,身体宽大,肉鳍在身体两侧直到尾部都有,则判定为乌贼。
52.步骤五,若观察到胴部形状是锥形,身体细长,肉鳍在尾部上呈两片三角状,则判定为鱿鱼。
53.步骤六,观察完毕后,电磁铁机构21通电启动产生磁场吸附铁棒22,使得套筒4与仓体1畅通,生物从而套筒4游出,由于套筒4不透光且鱿鱼带有发光器,因此探头41观察生物在昏暗环境下是否发光,进一步判断该生物。
54.综上所述,该基于人工智能的水生无脊椎动物自动识别设备,通过仓体1,连接筒2,套筒4,电缆5配合模拟呈水下生物,降低生物警惕性,从而便于对水下生物进行观察。通过将无脊椎生物捕捉至仓体1内,根据鱿鱼、乌贼身体特征不同,从进行识别区分。代替传统设备进行观察记录,避免由于乌贼、鱿鱼长相相似而导致运距离观察时不能识别,或者识别错误。
55.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1