双层风驱振摆型声光驱鸟器的制作方法
1.本技术涉及驱鸟器技术领域,特别涉及双层风驱振摆型声光驱鸟器。
背景技术:
2.本部分的陈述仅仅是提供了与本技术相关的背景技术信息,不必然构成在先技术。
3.为应对鸟害引发的线路短路、接地等故障,驱鸟器特别是结构简单、成本较低的风光驱鸟器大规模应用于电网杆塔、线路中,起到了一定效果,但也存在一些问题。典型的,由于驱鸟方式的单一性和鸟类的适应性,风光驱鸟器驱鸟的效果逐渐减小;另外,反光镜受限于太阳光的反射,在光线较弱的时段无法起到效果;再次,风光驱鸟器依赖风力驱鸟,受风力限制较大,风力较小时,驱鸟效果更差。由于生态环境的保护越来越深入人心,可以预见的鸟类种群数量会急剧扩大,风光驱鸟器的改进越来越重要。
技术实现要素:
4.本技术为了解决上述问题提出了双层风驱振摆型声光驱鸟器,通过反向转动的双层风驱组件之间的配合,使上层风驱的连接臂持续摆动,提高了风力利用效果且加强了驱鸟效果。
5.本技术提供了双层风驱振摆型声光驱鸟器,包括基座,基座顶部垂设有旋转基轴和支撑轴套,支撑轴套套设于旋转基轴外周,支撑轴套上旋转套设有第一套环,旋转基轴上旋转套设有第二套环,第二套环设于第一套环上部,所述第一套环侧壁上设置有3个下连臂,第二套环侧壁上设置有3个上连臂,所述下连臂包括连杆和设置于连杆末端的正向风碗,所述上连臂包括依次连接的连接基杆、作用柱、振摆弹簧、反向风碗,所述作用柱通过升降组件可升降设置于连接基杆末端,所述反向风碗和正向风碗的朝向相反;
6.所述第一套环顶部端面设置有振摆环,所述振摆环的顶部端面设置有弧形的凸出部,所述凸出部绕振摆环的中心轴线均匀分布且凸出部之间设置有弧形凹陷,所述作用柱的侧部抵接于振摆环顶部。
7.优选地,所述升降组件包括前升降组件和后升降组件,所述前升降组件连接于连接基杆末端,前升降组件的顶部设置有水平延伸的上固定杆,所述后升降组件垂直向下固接于上固定杆,所述作用柱的两端分别连接于前升降组件和后升降组件的升降部上。
8.优选地,所述前升降组件包括固接于连接基杆末端的前固定块,所述前固定块远离连接基杆的一侧开设有前滑槽,所述前滑槽的上下侧壁间设置有前滑轴,所述前滑轴上滑动套设有前滑块,前滑轴上还套设有前下压弹簧,所述前下压弹簧的一端连接于前滑槽上壁,一端连接于前滑块顶部;所述后升降组件包括连接于上固定杆的后固定块,所述后固定块的朝向前固定块的端面开设有后滑动通槽,所述后滑动通槽的上下侧壁间设置有后滑轴,所述后滑轴上滑动套设有后滑块,后滑轴上还套设有后下压弹簧,所述后下压弹簧的一端连接于后滑动通槽上壁,一端连接于后滑块顶部;所述作用柱的两端分别连接前滑块和
后滑块相对的端面,所述振摆弹簧连接于后滑块上。
9.优选地,所述下连臂包括两个反向风碗,其中一个连接于振摆弹簧末端,另一个连接于所述上固定杆末端。
10.优选地,所述前滑槽和后滑动通槽内还设有发声组件,所述发生组件包括设于前滑块、后滑块底部的鼓槌凸出部和设于前滑槽、后滑动通槽底部的微型鼓腔。
11.优选地,所述基座内部嵌设有控制器、第二驱动机构,所述旋转基轴旋转贯穿支撑轴套和基座顶壁连接于第二驱动机构的输出部,所述第二套环通过第二离合机构与旋转基轴活动连接,控制器与第二驱动机构、离合机构电连接。
12.优选地,所述第二套环内壁上开设有若干离合滑槽,所述离合滑槽内设有第二压持机构和第二动摩擦片,所述第二动摩擦片滑设于离合滑槽且与第二压持机构的输出轴连接,所述旋转基轴侧壁上相对于第二套环的位置环设有静摩擦环,所述第二压持机构、第二动摩擦片、静摩擦环构成第二离合机构。
13.优选地,所述上连臂的上固定杆上均匀设置有若干个爆闪灯;所述发声组件还包括嵌设于前滑槽、后滑动通槽底部的伸缩机构,所述微型鼓腔与伸缩机构的伸缩轴连接;所述旋转基轴上相对于第二套环下部套设有第二电滑环,所述第二电滑环的定子部通过滑环支架连接于支撑轴套顶部,其转子部连接于第二套环。
14.优选地,所述支撑轴套上相对于第一套环上部套设有第一电滑环,所述第一电滑环的定子部连接于支撑轴套,其转子部连接于第一套环;所述第一套环下部开设有驱动圆槽,所述驱动环槽内嵌设有驱动齿环,所述驱动齿环内周旋转套设于支撑轴套上,其外周上部与驱动圆槽侧壁通过第一离合机构活动连接,其外周下部套设有齿条环;所述基座顶部设有第一驱动机构,第一驱动机构的输出轴末端连接有安装轴,安装轴末端设有驱动齿轮,所述驱动齿轮设于齿条环一侧且与齿条环齿合。
15.优选地,所述第一离合机构与第二离合机构结构相同,包括嵌设于驱动环槽侧壁上的若干组第一压持机构、第一动摩擦片以及环设于驱动齿环外侧的第一静摩擦环;所述下连臂的连杆上也设有若干爆闪灯;所述基座顶部还设有风速计、光纤传感器、红外感应报警器。
16.与现有技术相比,本技术的有益效果为:
17.(1)本技术通过正向风碗和反向风碗使上连臂和下连臂反向转动,提高了转动的复杂性,加强了驱鸟效果,同时,作用柱抵触于振摆环顶部,在上连臂和下连臂的反向转动驱使下,沿振摆环的弧形顶部周期性升降,带动振摆弹簧摆动,突破了鸟类对驱鸟器的识别惯性,进一步地加强了驱鸟效果。
18.(2)本身请通过上连臂上的爆闪灯,可在光线较弱的情况下加强驱鸟器的光驱效果。
19.(3)本技术通过第一离合机构、第二离合机构兼顾了风力和第一驱动机构、第二驱动机构,避免了驱鸟器对风力的依赖,加强了驱鸟的可控性和灵活性,在风力较弱的情况下使用第一驱动机构、第二驱动机构作为动力源,保证了驱鸟效果,在风力较强时,依靠风力作为动力源,节约了能源消耗。
20.(4)本技术通过和升降组件配合的微型鼓腔、鼓槌凸出部实现了声音驱鸟,进一步地加强了驱鸟方式的多样性和驱鸟效果,同时,通过红外感应开关和伸缩机构,在鸟类靠近
时发声驱赶,提高了驱鸟的针对性。
附图说明
21.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
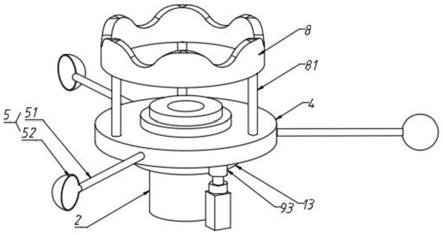
22.图1是本技术一种实施例的整体结构示意图,
23.图2是本技术一种实施例的上连臂局部结构示意图,
24.图3是本技术一种实施例的局部放大图a,
25.图4是本技术一种实施例的前固定块剖视图,
26.图5是本技术一种实施例的整体结构俯视图,
27.图6是本技术一种实施例的整体结构侧视图,
28.图7是本技术一种实施例的上风驱组件局部结构示意图,
29.图8是本技术一种实施例的下风驱组件局部结构示意图,
30.图9是本技术一种实施例的第一离合机构剖视图,
31.图10是本技术一种实施例的第二离合机构剖视图,
32.图11是本技术一种实施例的局部放大图b。
33.图中:
34.1、基座,2、支撑轴套,3、旋转基轴,4、第一套环,5、下连臂,6、第二套环,7、上连臂,8、振摆环,9、驱动组件,10、光线传感器,11、风速计,12、太阳能电池板,13、驱动齿环,14、发生组件,15、第一电滑环,16、第二离合机构,17、第一离合机构,18、第二电滑环,19、红外感应报警器,51、连杆,52、正向风碗,71、连接基杆,72、前升降组件,73、作用柱,74、后升降组件,75、上固定杆,76、振摆弹簧,77、爆闪灯,78、反向风碗,81、延伸支架,91、第一驱动机构,92、输出转轴,93、驱动齿轮,94、安装轴,131、齿条环,141、伸缩机构,142、微型鼓腔,143、鼓槌凸出部,161、第二静摩擦环,162、第二静摩擦片,163、第二压持机构,171、第一静摩擦环,172、第一静摩擦片,173、第一压持机构,181、滑环支架,721、前固定块,722、前滑轴,723、前滑块,724、前下压弹簧,741、后固定块,742、后滑轴,723、后滑块,724、后下压弹簧。
具体实施方式:
35.下面结合附图与实施例对本技术作进一步说明。
36.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本公开的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
37.在本公开中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部件或元件结构关系而确定的关系词,并非特指本公开中任一部件或元件,不能理解为对本公开的限制。
38.如图1至图11所示,本技术提供了双层风驱振摆型声光驱鸟器,包括基座1,基座1顶部垂设有旋转基轴3和支撑轴套2,支撑轴套2套设于旋转基轴3外周,支撑轴套2上旋转套
设有第一套环4,旋转基轴3上旋转套设有第二套环6,第二套环6设于第一套环4上部,所述第一套环4侧壁上设置有3个下连臂5,第二套环6侧壁上设置有3个上连臂7,所述下连臂5包括连杆51和设置于连杆51末端的正向风碗52,所述上连臂7包括依次连接的连接基杆71、作用柱73、振摆弹簧76、反向风碗78,所述作用柱73通过升降组件可升降设置于连接基杆71末端,所述反向风碗78和正向风碗52的朝向相反。
39.所述第一套环4顶部端面设置有振摆环8,所述振摆环8的顶部端面设置有弧形的凸出部,所述凸出部绕振摆环8的中心轴线均匀分布且凸出部之间设置有弧形凹陷,所述作用柱73的侧部抵接于振摆环8顶部。所述振摆环8通过延伸支架81固接于第一套环4。
40.所述上连臂7和下连臂5朝向水平设置,反向风碗78和正向风碗52的朝向相反是指当上连臂7和下连臂5运动至同一垂直面时,两者朝向相反,反向风碗78和正向风碗52内设置有反光镜。反向风碗78和正向风碗52受到风力驱动,带动上连臂7和下连臂5朝向相反的方向旋转,由于作用柱73的侧部抵触与振摆环8的顶部,作用柱73在旋转的过程中同时沿振摆环8顶部的弧形的凸出部和弧形凹陷做升降运动,带动振摆弹簧76上下摆动,扩大了反光镜的照射范围,也突破了鸟类对驱鸟器的识别惯性,增强了驱鸟效果。
41.具体地,所述升降组件包括前升降组件72和后升降组件74,所述前升降组件72连接于连接基杆71末端,前升降组件72的顶部设置有水平延伸的上固定杆75,所述后升降组件74垂直向下固接于上固定杆75,所述作用柱73的两端分别连接于前升降组件72和后升降组件74的升降部上。
42.所述前升降组件72包括固接于连接基杆71末端的前固定块721,所述前固定块721远离连接基杆71的一侧开设有前滑槽,所述前滑槽的上下侧壁间设置有前滑轴722,所述前滑轴722上滑动套设有前滑块723,前滑轴722上还套设有前下压弹簧724,所述前下压弹簧724的一端连接于前滑槽上壁,一端连接于前滑块723顶部。
43.所述后升降组件74包括连接于上固定杆75的后固定块741,所述后固定块741的朝向前固定块721的端面开设有后滑动通槽,所述后滑动通槽的上下侧壁间设置有后滑轴742,所述后滑轴742上滑动套设有后滑块743,后滑轴742上还套设有后下压弹簧744,所述后下压弹簧744的一端连接于后滑动通槽上壁,一端连接于后滑块743顶部。
44.所述作用柱73的两端分别连接前滑块723和后滑块743相对的端面,所述振摆弹簧76连接于后滑块743上。
45.所述作用柱73在旋转的过程中同时沿振摆环8顶部的弧形的凸出部和弧形凹陷做升降运动,带动前滑块723、后滑块743分别沿前滑槽和后滑动通槽升降运动,进而带动振摆弹簧76上下摆动,所述前滑块723、后滑块743用于对作用柱73进行固定和导向,所述前下压弹簧724、后下压弹簧744用于将作用柱73压持在振摆环8顶部,阻止作用柱73和振摆环8脱离。
46.优选地,所述下连臂5包括两个反向风碗78,其中一个连接于振摆弹簧76末端,另一个连接于所述上固定杆75末端。两个反向风碗78加强了对风力的利用效果,同时也避免由于振摆弹簧76的摆动造成其连接的反向风碗78受风效果减弱,进而对下连臂5的转速造成影响。
47.更进一步地,所述前滑槽和后滑动通槽内还设有发声组件14,所述发声组件14包括设于前滑块723、后滑块743底部的鼓槌凸出部143和设于前滑槽、后滑动通槽底部的微型
鼓腔142。作用柱73带动前滑块723、后滑块743分别沿前滑槽和后滑动通槽升降运动,进而为前滑块723、后滑块743底部的鼓槌凸出部143敲击设于前滑槽、后滑动通槽底部的微型鼓腔142提供了动力,实现了通过声音驱鸟的功能,丰富了本技术的驱鸟手段,加强了驱鸟效果。
48.优选地,所述基座1内部嵌设有控制器、第二驱动机构,所述旋转基轴3旋转贯穿支撑轴套2和基座1顶壁并连接于第二驱动机构的输出部,所述第二套环6通过第二离合机构16与旋转基轴3活动连接。控制器与第二驱动机构、第二离合机构16电连接。
49.具体地,所述第二套环6内壁上开设有若干离合滑槽,所述离合滑槽内设有第二压持机构163和第二动摩擦片162,所述第二动摩擦片162滑设于离合滑槽内且与第二压持机构163的输出轴连接,所述旋转基轴3侧壁上相对于第二套环6的位置环设有第二静摩擦环161,所述第二压持机构163、第二动摩擦片162、第二静摩擦环161构成第二离合机构16。
50.当选择风力作为动力源驱动第二套环6、上连臂7旋转时,所述控制器控制第二压持机构163的输出轴回缩,使第二动摩擦片162和第二静摩擦环161脱离,第二套环6、上连臂7在反向风碗78的带动下旋转驱鸟;当选择第二驱动机构作为动力源驱动第二套环6、上连臂7旋转时,所述控制器控制第二压持机构163的输出轴伸长,使第二动摩擦片162和第二静摩擦环161压持抵接,从而将第二套环6和旋转基轴3固定,控制器控制第二驱动机构旋转,带动旋转基轴3旋转,进而带动第二套环6、上连臂7旋转驱鸟。
51.所述第一套环4下部开设有驱动圆槽,所述驱动圆槽内嵌设有驱动齿环13,所述驱动齿环13内周旋转套设于支撑轴套2上,其外周上部与驱动圆槽侧壁通过第一离合机构17活动连接,其外周下部套设有齿条环131,所述齿条环131一侧设置有驱动组件9。
52.具体地,所述驱动组件9包括设于基座1顶部的第一驱动机构91,第一驱动机构91的输出轴转92末端连接有安装轴94,安装轴94末端设有驱动齿轮93,所述驱动齿轮93设于齿条环131一侧且与齿条环131齿合。
53.所述第一离合机构17与第二离合机构16结构相同,包括嵌设于驱动环槽侧壁上的若干组第一压持机构173、第一动摩擦片172以及环设于驱动齿环13外侧的第一静摩擦环171。控制器与第一离合机构17、第一驱动机构91电连接。
54.当选择风力作为动力源驱动第一套环4、下连臂5旋转时,所述控制器控制第一压持机构173的输出轴回缩,使第一动摩擦片172和第一静摩擦环171脱离,第一套环6、下连臂5在正向风碗52的带动下旋转驱鸟;当选择第一驱动机构91作为动力源驱动第一套环4、下连臂5旋转时,所述控制器控制第一压持机构173的输出轴伸长,使第一动摩擦片172和第二静摩擦环171压持抵接,从而将第一套环4和驱动齿环13固定,控制器控制第一驱动机构91的输出转轴92旋转,进而带动安装轴94、驱动齿轮93选择,进而通过齿条环131带动驱动齿环13旋转,进而带动第一套环4、下连臂5旋转驱鸟。
55.所述第一离合机构17、第二离合机构16、第一驱动机构9、第二驱动机构用于减小或避免驱鸟器对风力的依赖,加强了驱鸟的可控性和灵活性,在风力较弱的情况下使用第一驱动机构、第二驱动机构作为动力源,保证了驱鸟效果,在风力较强时,依靠风力作为动力源,节约了能源消耗。
56.所述上连臂7的上固定杆75上设置有若干个爆闪灯77,优选地,述下连臂5的连杆51上也设有若干爆闪灯77。所述爆闪灯77与控制器电气连接,用于在光线较弱的情况下发
光驱鸟,克服了反光镜对光线的依赖。
57.所述发声组件14还包括嵌设于前滑槽、后滑动通槽底部的伸缩机构141,所述微型鼓腔142与伸缩机构141的伸缩轴连接。所述伸缩机构141与控制器电气连接,用于控制发声组件14的声音驱鸟功能的开启和关闭。当需要开启声音驱鸟功能时,所述控制器控制伸缩机构141的伸缩轴伸长带动微型鼓腔142向上运动至预定位置,所述预定位置位于前滑块723、后滑块743的升降行程之内,使前滑块723、后滑块743下降过程中鼓槌凸出部143击打微型鼓腔142发声,从而开启声音驱鸟功能;当需要关闭声音驱鸟功能时,所述控制器控制伸缩机构141的伸缩轴回缩带动微型鼓腔142向下运动直至脱离前滑块723、后滑块743的升降行程,使前滑块723、后滑块743下降过程中鼓槌凸出部143无法接触微型鼓腔142,从而关闭声音驱鸟功能。
58.所述旋转基轴3上相对于第二套环6下部套设有第二电滑环18,所述第二电滑环18的定子部通过滑环支架181连接于支撑轴套2顶部,其转子部连接于第二套环6,控制器通过第二电滑环18与第二套环6以及上连臂7上的爆闪灯77、伸缩机构141、第二离合机构16电连接,第二电滑环18还用于爆闪灯77、伸缩机构141、第二离合机构16连接电源。
59.所述支撑轴套2上相对于第一套环4上部套设有第一电滑环15,所述第一电滑环15的定子部连接于支撑轴套2,其转子部连接于第一套环4,控制器通过第一电滑环15与第一套环4、下连臂5上的爆闪灯77、第一离合机构17电连接,所述第一电滑环15还用于下连臂5上的爆闪灯77、第一离合机构17来捏电源。
60.所述基座1顶部还设有与控制器电连接的风速计11、光线传感器10、红外感应报警器19。所述风速计11用于检测风速,当风速小于预设值时,所述控制器通过第一离合机构17、第二离合机构16切换第一驱动机构9、第二驱动机构作为动力源,当风速大于等于预设值时,控制器通过第一离合机构17、第二离合机构16切换风力作为动力源;所述光线传感器10用于检测光照强度,当光照小于预设值时,控制器开启爆闪灯77以用于驱鸟,当光照强度大于等于预设值时,控制器关闭爆闪灯77;所述红外感应报警器19用于检测预设位置范围是否有鸟类进入,当检测到鸟类进入预设位置范围后,所述控制器通过伸缩机构141开启发生组件14的发声驱鸟功能,当在预设时间范围内,未检测到鸟类在预设位置范围,所述控制器通过伸缩机构141关闭发生组件14的发声驱鸟功能。
61.所述基座1上设置有太阳能电池板12,基座1内部嵌设有太阳能控制器和蓄电池。所述太阳能电池板9用于给蓄电池供电续航,所述蓄电池用于本技术各部件的供电。
62.所述控制器为单片机设备,所述第一驱动机构91、第二驱动机构为旋转马达,所述第一压持机构173、第二压持机构163、伸缩机构141为电缸。
63.本技术还提供了风光声并行驱鸟方法,其具体步骤为:
64.s100:控制器通过风速计11检测风速,并根据风速通过第一离合机构17、第二离合机构16选择动力源,驱动上连臂7、下连臂5旋转,作用柱73在旋转的过程中同时沿振摆环8顶部的弧形的凸出部和弧形凹陷做升降运动,进而带动振摆弹簧76上下摆动;
65.s200:控制器通过光线传感器10检测光照强度,并根据光照强度开启或关闭爆闪灯77;
66.s300:控制器通过红外感应报警器19检测预设位置范围是否有鸟类进入,当检测到鸟类进入预设位置范围后,所述控制器通过伸缩机构141开启发生组件14的发声驱鸟功
能,当在预设时间范围内,未检测到鸟类在预设位置范围,所述控制器通过伸缩机构141关闭发生组件14的发声驱鸟功能。
67.以上仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
68.上述虽然结合附图对本技术的具体实施方式进行了描述,但并非对本技术保护范围的限制,所属领域技术人员应该明白,在本技术的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本技术的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1