沉香树自动爬行打孔设备及打孔方法与流程
1.本发明涉及沉香树打孔设备技术领域,更具体的说是涉及沉香树自动爬行打孔设备及打孔方法。
背景技术:
2.沉香树木材受伤后,由于真菌的侵入而使其薄壁组织细胞内的淀粉产生一系列的化学变化,最后形成香脂,凝结于木材内,这就是沉香的结香原理。在沉香树结香工艺中。
3.一般沉香树结香有以下几种的方式:
4.1、当香树生长到6~8年后,在距地面半米至一米处,用利刀顺砍几刀,每刀间距约30 厘米,刀口深约3厘米,这样就使得伤口内逐渐分泌出油脂,渐渐结香,结香时间越长,香品质就越好
5.2、半断干枝的办法,即香农称的“开香门”或“开香口”。在树干距地1米左右的地方,用锯子锯一伤口,深度根据树干大小而定,一般不要超过树干粗的三分之一,后用凿子凿一个“门”字形,或凿成马牙形,约8~12个月后,伤口就会结香。
6.3、用烧红的铁棒,在树干上打洞,烧伤的洞口里也可结香。近年,有些地方还采用了化学药物进行人工接种,用菌种使伤口感染和繁殖,令其结香速度加快,提高经济效益。
7.现在常用的是第三种方式,而现有技术中,通常都是通过人工的方式进行施工的,劳动强度大、效率低、不同的人火候掌握不一致,结香效果因人而异,效果不理想;再者传统的通过明火对铁棒加热的,野外施工存在火灾风险及存在通红铁棒烫伤工作人员的风险。
8.再有,沉香树在打孔的过程中,不仅仅是对于一个高度的树干进行打孔,往往在树干上同一高度打孔多个,以及在不同的高度上进行打孔,而针对于不同高度进行打孔时,则需要使用升降装置,将操作者升高,进行打孔,无法进行自动化、智能化的打孔。
技术实现要素:
9.有鉴于此,本发明提供了沉香树自动爬行打孔设备及打孔方法。
10.为了实现上述目的,本发明采用如下技术方案:沉香树的自动爬行打孔设备,包括:支撑板,作为整个设备的基板;竖向方向对称设置的两组爬行臂,两组爬行臂之间通过第一驱动装置驱动相向或相背离移动,爬行臂包括:水平方向对称设置两组夹持臂及驱动两组夹持臂相对夹持或相对展开的第二驱动装置,夹持臂的内壁构造为弧形或接近弧形以抱紧树干;打孔装置,包括:机箱、装配于机箱内的加热组件、打孔棒以及第三驱动装置;所述的加热组件将所述打孔棒加热,所述的第三驱动装置驱动所述打孔棒螺旋式推进前后伸缩进行打孔;所述的支撑板位于两组爬行臂纵向距离之间,且支撑板与其中一组爬行臂固定,与另一组爬行臂之间通过伸缩套杆连通;所述的机箱安装于支撑板上,一第四驱动装置驱动机箱相对于支撑板水平往复移动;所述的爬行臂包括:支架及对称的所述夹持臂,所述的两组夹持臂的第一端通过连接杆组连接,且夹持臂与连接杆组枢接;所述的第二驱动装置安装于支架上,其输出轴与连杆组件连接;所述的第一驱动装置设置有两爬行臂的支架
之间;所述的第一驱动装置、第二驱动装置、第三驱动装置及第四驱动装置为位于支撑板的背向侧。
11.进一步的技术方案中,所述的夹持臂包括:上夹持板及下夹持板,上夹持板和下夹持板支架距离为x,上夹持板和下夹持板之间设置有高硬度轴杆。
12.进一步的技术方案中,所述的夹持臂上设置有压力传感器。
13.进一步的技术方案中,所述的连杆组件包括:第一连接杆及第二连接杆;其中,位于高位的爬行臂中,第一连接杆和第二连接杆的连接处通过连接轴可转动连接,且连接处与支撑板顶部通过浮动球头连接;位于低位的爬行臂中,第一连接杆和第二连接杆的连接处通过伸缩套杆可转动连接,且伸缩套杆与支撑板顶部通过浮动球头连接。
14.进一步的技术方案中,所述的第一驱动装置为气缸或丝杆装置;第一驱动装置安装于两爬行臂的支架之间;所述第一驱动装置对称分布有两个,与所述的两个夹持臂对应。
15.进一步的技术方案中,所述的支撑板的正面构造为基准面,支撑板的背面设置有滑轨;所述的机箱通过滑板安装于滑轨上;所述的第四驱动装置为丝杆装置。
16.进一步的技术方案中,所述的机箱上设置有连接于支撑板的第一支撑脚,该第一支撑脚与机箱、支撑板之间呈三角形分布。
17.进一步的技术方案中,还包括一控制箱。
18.沉香树自动爬行打孔设备的打孔方法,包括以下步骤:
19.s1:操作员通过控制箱输入操作参数:
20.该参数包括:
21.a横向孔位的间隔距离;
22.b竖向距离打孔数目及竖向孔位的间隔距离;
23.c加热组件的加热温度;
24.d打孔棒的打孔时间;
25.s2:打孔设备第一次抱紧树干,上、下两组爬行臂抱紧树干,测量树干直径,通过智能分析自动设定打孔数量,打孔的数量由树干直径及s1中设定的横向孔位的间隔距离限制,分析设定横向打孔数量为x1;
26.s3:加热组件按照设定加热温度将打孔棒加热,达到设定温度后,第三驱动装置驱动打孔棒外移打孔,停留设定时间后第三驱动装置驱动打孔棒内移,完成第一次打孔;
27.s4:第四驱动装置根据设定距离驱动整个打孔装置移动,移动至下一个打孔位置;打孔装置移动的同时加热组件对打孔棒再次加热,加热至指定温度后,第三驱动装置驱动打孔棒外移打孔,停留设定时间后第三驱动装置驱动打孔棒内移,完成第一次打孔;
28.循环步骤s4,直至完成了横向打孔的数量;
29.s5:在横向打孔完成后,需要移动至下一个纵向高度再次进行横向打孔;
30.竖向移动时,低位的爬行臂继续夹紧树干,高位的爬行臂在第二驱动装置的驱动下松开树干,第一驱动装置驱动高位的爬行臂上移,移动至设定高度后,第二驱动装置驱动高位的爬行臂夹持树干;然后,低位的爬行臂松开树干,接着通过第一驱动装置的收缩带动低位的爬行臂上移;
31.在高位的爬行臂上移的同时,支撑板及打孔装置跟随移动,同时伸缩套杆拉伸;
32.在低位的爬行臂上移时,伸缩套杆收缩;
33.s6:打孔装置纵向移位完成后,重复步骤s3-s4;
34.s7:循环步骤s3-s6,直至完成打孔;
35.s8:打孔完成后,打孔装置自行下移,下移时,低位的爬行臂在第二驱动装置的驱动下松开树干,第一驱动装置驱动低位的爬行臂下移,移动至最大行程后,第二驱动装置驱动低位的爬行臂夹持树干;然后,高位的爬行臂松开树干,接着通过第一驱动装置的收缩带动高位的爬行臂下移;多次重复下移动作复位。
36.进一步的打孔方法中,所述步骤s2中,树干直径的计算,是通过爬行臂的夹持臂在最大张开位置至夹持树干后第二驱动装置的输出轴的移动距离进而计算树干的直径;
37.所述的步骤s5中,若步骤s1中所设定的竖向孔位之间的距离大于高位的爬行臂和低位的爬行臂之间的最大行程,则可以通过多次竖向爬行至设定的距离。
38.经由上述的技术方案可知,与现有技术相比,本发明具有以下有益技术效果:本发明将传统的手动通过通红铁棒对树干打孔结香的工艺,改为自动化/半自动化的结香工艺,大大减轻了生产工艺的劳动强度,从传统的一天一人打约600孔,到使用本设备后一人一天约3000孔以上,大大提高了工作效率,同时提高了施工的安全性;
39.本发明具有自动爬行功能,可以对同一树干不同高度进行打孔,使用更加方便;
40.本发明结构简单,操作方便,通过电磁加热铁棒的方式,无需明火,更加安全。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
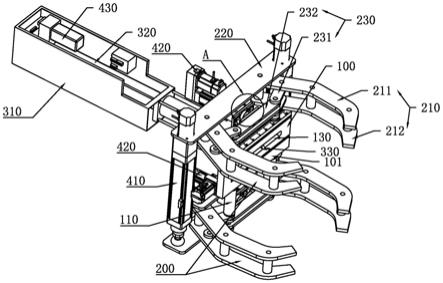
42.图1-2为本发明不同角度的示意图;
43.图3为图1中a处的放大图;
44.图4为打孔装置的示意图;
45.图5为爬行状态下不同角度的示意图;
46.图6为俯视角度的示意图。
具体实施方式
47.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
48.沉香树的自动爬行打孔设备,请参阅图1-6所示,包括:
49.支撑板100,作为整个设备的基板,支撑板100采用高硬度金属制成,支撑板100的正面构造为基准面101,支撑板100的背面设置有滑轨120,设备在运行时,支撑板100的基准面101是与树干接触的,支撑板100的上开设有贯通于支撑板100正面及背面的条形槽 130。
50.爬行臂200:
51.包括:竖向放置对称设置的两组爬行臂200,可以界定为高位的爬行臂200及低位的爬行臂200,高位的爬行臂200及低位的爬行臂200之间通过第一驱动装置410驱动相向或相背离移动;
52.爬行臂200是将整个设备夹持支撑在树干上,同时可以带动整个设备在树干上上下爬行的;爬行臂200包括:水平方向对称设置两组夹持臂210及驱动两组夹持臂210相对夹持或相对展开的第二驱动装置420,夹持臂210的内壁构造为弧形或接近弧形以抱紧树干;
53.所述的夹持臂210包括:上夹持板211及下夹持板212,上夹持板211和下夹持板212 支架距离为x,上夹持板211和下夹持板212之间设置有高硬度轴杆213;夹持臂210的此种结构是为了更好地对树干进行夹持;
54.树干大致是呈圆形的,那么在夹持树干时,若夹持臂210采用的是面接触,那么可能由于树干的形状问题而导致树干与夹持臂210的接触面积多小,导致夹持不稳定;
55.但是本实施例中,夹持臂210呈大致是弧形设置,并且分为上夹持板211和下夹持板 212,能够增加夹持臂210与树干之间的接触,增强夹持的效果;
56.进一步地,所述的夹持臂210也是采用高硬度金属制成。
57.进一步地,所述的两组夹持臂210的第一端通过连接杆组230连接,且夹持臂210与连接杆组230枢接,第二驱动装置420安装于支架220上,其输出轴与连杆组件230连接;连接杆组230包括:第一连接杆231及第二连接杆232;其中,位于高位的爬行臂200中,第一连接杆231和第二连接杆232的连接处通过连接轴可转动连接,且连接处与支撑板100 顶部通过浮动球头连接;位于低位的爬行臂200中,第一连接杆231和第二连接杆232的连接处通过伸缩套杆110可转动连接,且伸缩套杆110与支撑板100顶部通过浮动球头连接。
58.使用时,所述的第二驱动装置420的输出轴以图6所示方向向下伸出,驱动第二连杆 232向下伸出,同时带动左右两个夹持臂210相对闭合移动,对树干进行夹持;反之,第二连杆232向下移动,则左右两个夹持臂210相对展开移动,松开树干,结构简单,使用方便。
59.进一步地,所述的夹持臂210的末端可以增设有弹性指,该弹性指作为夹持臂210的延长段,起到一定的夹持作用。
60.所述的支撑板100位于两组爬行臂200纵向距离之间,且支撑板100与其中一组爬行臂 200固定,与另一组爬行臂200之间通过伸缩套杆110连通;
61.所述的第一驱动装置410为气缸或丝杆装置,第一驱动装置500安装于两爬行臂200的支架220之间;所述第一驱动装置500对称分布有两个,与所述的两个夹持臂210对应,第一驱动装置500驱动两个爬行臂200之间相靠近或远离移动。
62.进一步地,所述的第一驱动装置410设置有两爬行臂200的支架220之间;
63.进一步地,所述的夹持臂210上设置有压力传感器,能够感测夹持臂210与树干之间的夹持力。
64.所述的第二驱动装置420可以采用丝杆装置,通过丝杆的转动驱动两夹持臂210之间的相对闭合或打开,通过可以通过丝杆转动的圈数计算量夹持臂210夹持后所移动的距离,便于后续自动计算树干的直径,以进一步计算打孔数量。
65.如:设定两个夹持臂210之间的最大展开距离为1m,在最大展开距离使丝杆的位置为基准位置,当丝杆转动x圈后,夹持臂210夹持稳定,此时可以通过丝杆转动的圈数计算两夹臂之间的移动距离,进而得出树干直径。
66.所述的压力传感器的作用,可以是当压力传感器感测压力大于阈值时,向控制箱500 发送信号,使第二驱动装置420停止,夹持臂210稳定夹持树干。
67.在夹持时,所述的支撑板100、两组爬行臂200的夹持臂210之间构成了夹持空间,
将树干抱紧。
68.打孔装置300:
69.包括:机箱310、装配于机箱内的加热组件320、打孔棒330以及第三驱动装置430;所述的加热组件320将所述打孔棒330加热,所述的第三驱动装置430驱动所述打孔棒330 螺旋式推进前后伸缩进行打孔;所述的打孔帮330穿过支撑板100的条形槽130移动。
70.所述的机箱310安装于支撑板100上,一第四驱动装置310驱动机箱310相对于支撑板 100水平往复移动;机箱310通过滑板340安装于滑轨上;所述的第四驱动装置440为丝杆装置。所述的机箱310上设置有连接于支撑板100的第一支撑脚,该第一支撑脚与机箱310、支撑板100之间呈三角形分布,第一支撑脚能够增强机箱310与支撑板100之间的连接,
71.进一步地,所述的第一驱动装置410、第二驱动装置420、第三驱动装置430及第四驱动装置440为位于支撑板100的背向侧。
72.进一步地,还包括一控制箱500,控制箱500可以是设置于机箱310内,也可以是通过长电源线与机箱310电性连接。
73.沉香树自动爬行打孔设备的打孔方法,其特征在于:包括以下步骤:
74.s1:操作员通过控制箱500输入操作参数:
75.该参数包括:
76.a横向孔位的间隔距离;
77.b竖向距离打孔数目及竖向孔位的间隔距离;
78.c加热组件320的加热温度;
79.d打孔棒330的打孔时间;
80.s2:打孔设备第一次抱紧树干,上、下两组爬行臂200抱紧树干,测量树干直径,通过智能分析自动设定打孔数量,打孔的数量由树干直径及s1中设定的横向孔位的间隔距离限制,分析设定横向打孔数量为x1;
81.s3:加热组件320按照设定加热温度将打孔棒330加热,达到设定温度后,第三驱动装置 430驱动打孔棒330外移打孔,停留设定时间后第三驱动装置430驱动打孔棒330内移,完成第一次打孔;
82.s4:第四驱动装置440根据设定距离驱动整个打孔装置300移动,移动至下一个打孔位置;打孔装置300移动的同时加热组件320对打孔棒330再次加热,加热至指定温度后,第三驱动装置430驱动打孔棒330外移打孔,停留设定时间后第三驱动装置430驱动打孔棒330 内移,完成第一次打孔;
83.循环步骤s4,直至完成了横向打孔的数量;
84.s5:在横向打孔完成后,需要移动至下一个纵向高度再次进行横向打孔;
85.竖向移动时,低位的爬行臂200继续夹紧树干,高位的爬行臂200在第二驱动装置420的驱动下松开树干,第一驱动装置410驱动高位的爬行臂200上移,移动至设定高度后,第二驱动装置420驱动高位的爬行臂200夹持树干;然后,低位的爬行臂200松开树干,接着通过第一驱动装置410的收缩带动低位的爬行臂200上移;
86.在高位的爬行臂200上移的同时,支撑板100及打孔装置300跟随移动,同时伸缩套杆110 拉伸;
87.在低位的爬行臂200上移时,伸缩套杆110收缩;
88.s6:打孔装置纵向移位完成后,重复步骤s3-s4;
89.s7:循环步骤s3-s6,直至完成打孔;
90.s8:打孔完成后,打孔装置自行下移,下移时,低位的爬行臂200在第二驱动装置420的驱动下松开树干,第一驱动装置410驱动低位的爬行臂200下移,移动至最大行程后,第二驱动装置420驱动低位的爬行臂200夹持树干;然后,高位的爬行臂200松开树干,接着通过第一驱动装置410的收缩带动高位的爬行臂200下移;多次重复下移动作复位。
91.上述步骤s2中,树干直径的计算,是通过爬行臂200的夹持臂210在最大张开位置至夹持树干后第二驱动装置420的输出轴的移动距离进而计算树干的直径;
92.所述的步骤s5中,若步骤s1中所设定的竖向孔位之间的距离大于高位的爬行臂200和低位的爬行臂200之间的最大行程,则可以通过多次竖向爬行至设定的距离;
93.下面以具体的数据说明本发明的打孔方法:
94.s1:操作员通过控制箱500输入操作参数:
95.该参数包括:
96.a横向孔位的间隔距离为15cm;
97.b竖向距离打孔数目为3,竖向孔位的间隔距离40cm;
98.c加热组件320的加热温度80℃;
99.d打孔棒330的打孔时间15s;
100.s2:打孔设备第一次抱紧树干,上、下两组爬行臂200抱紧树干,测量树干直径为60cm,那么打孔数量为3个;
101.s3:加热组件320按照设定加热温度将打孔棒330加热,达到设定温度80℃后,第三驱动装置430驱动打孔棒330外移打孔,停留15s后第三驱动装置430驱动打孔棒330内移,完成第一次打孔;并且第一次打孔时是从树干的中心处打孔,再向两则打孔;
102.s4:第四驱动装置440根据设定距离驱动整个打孔装置300移动,打孔装置300向左移动15cm,移动至下一个打孔位置;打孔装置300移动的同时加热组件320对打孔棒330再次加热,加热至指定温度后,第三驱动装置430驱动打孔棒330外移打孔,停留15s后第三驱动装置430驱动打孔棒330内移,打孔装置300向右移动30cm,移动至下一个打孔位置,进行打孔;
103.s5:在横向打孔完成后,需要移动至下一个纵向高度再次进行横向打孔;
104.竖向移动时,低位的爬行臂200继续夹紧树干,高位的爬行臂200在第二驱动装置420 的驱动下松开树干,第一驱动装置410驱动高位的爬行臂200上移,移动40cm高度后,第二驱动装置420驱动高位的爬行臂200夹持树干;然后,低位的爬行臂200松开树干,接着通过第一驱动装置410的收缩带动低位的爬行臂200上移;
105.在高位的爬行臂200上移的同时,支撑板100及打孔装置300跟随移动,同时伸缩套杆110 拉伸;
106.在低位的爬行臂200上移时,伸缩套杆110收缩;
107.s6:打孔装置纵向移位完成后,重复步骤s3-s4;
108.s7:循环步骤s3-s6,直至完成打孔;
109.s8:打孔完成后,打孔装置自行下移,下移时,低位的爬行臂200在第二驱动装置420 的驱动下松开树干,第一驱动装置410驱动低位的爬行臂200下移,移动至最大行程后,
第二驱动装置420驱动低位的爬行臂200夹持树干;然后,高位的爬行臂200松开树干,接着通过第一驱动装置410的收缩带动高位的爬行臂200下移;多次重复下移动作复位。
110.通过上述,能够实现自动化的沉香树打孔。
111.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1