一种多仓式全自动猪饲料喂料装置的制作方法
1.本实用新型涉及猪饲料喂料设备技术领域,特别涉及一种多仓式全自动猪饲料喂料装置。
背景技术:
2.在生猪养殖过程中,猪的给料饲喂过程管理是关键环节,直接关系到养殖质量和经济效益,传统养猪场每次给猪喂食时,都要人工向猪槽内添加猪食,由于所养的猪较多,喂养人员需要提着猪食桶逐个地向猪槽内添加猪食,这样不仅效率低,而且饲养人员的劳动量大,不利于上规模养殖,因此,市面上出现了猪饲料喂料设备,猪饲料喂料设备的出现,提高了工作效率,解放了劳动力,然而,目前的猪饲料喂料自动化程度低,饲料供给过于单一,一次只能供给一种饲料,无法针对生猪不同生长期所需饲料的供给。
技术实现要素:
3.针对上述技术问题,本实用新型提供了一种多仓式全自动猪饲料喂料装置,能够避免目前的猪饲料喂料自动化程度低,饲料供给过于单一,一次只能供给一种饲料,无法针对生猪不同生长期所需饲料的供给的问题。
4.为了实现上述目的,本实用新型的技术方案具体如下:
5.一种多仓式全自动猪饲料喂料装置,包括支架,所述支架上设置轨道,所述轨道上设置行走分料箱,所述行走分料箱内部设置有若干个针对生猪不同生长期专用饲料的料仓, 所述料仓底部均设置有缺料传感组件,所述料仓底部均设置有双向送料机构,所述双向送料机构两端的出口上分别设置有左出料管和右出料管,所述左出料管和右出料管的出口上分别设置有左关闭组件和右关闭组件,所述左出料管和右出料管的出口分别与设置于所述支架两侧的左猪食槽和右猪食槽相对应,所述轨道上设置有与所述左猪食槽或右猪食槽位置相对应的接近开关,所述左出料管和右出料管的出口上均设置有左料满传感器和右料满传感器,所述缺料传感组件、接近开关以及左料满传感器和右料满传感器分别与plc控制系统连接,所述plc控制系统分别与所述行走分料箱的动力组件、双向送料机构的动力组件以及左关闭组件和右关闭组件的动力源连接。
6.所述行走分料箱内部设置有若干个针对生猪不同生长期专用饲料的料仓具体为初期饲料仓、中期饲料仓和后期饲料仓,所述初期饲料仓底部设置第一低料位传感器,所述中期饲料仓底部设置第二低料位传感器,所述后期饲料仓底部设置第三低料位传感器,所述双向送料机构包括初期螺旋送料器、中期螺旋送料器和后期螺旋送料器,所述初期螺旋送料器水平设置于所述初期饲料仓底部出口上,所述初期螺旋送料器两端底部分别设置有第一左出口和第一右出口,所述初期螺旋送料器的主轴上配合安装有第一减速器,所述第一减速器的动力输入端上配合安装第一正反转电机,所述中期螺旋送料器水平设置于所述中期饲料仓底部出口上,所述中期螺旋送料器两端底部分别设置有第二左出口和第二右出口,所述中期螺旋送料器的主轴上配合安装有第二减速器,所述第二减速器的动力输入端
上配合安装第二正反转电机,所述后期螺旋送料器水平设置于所述后期饲料仓底部出口上,所述后期螺旋送料器两端底部分别设置有第三左出口和第三右出口,所述后期螺旋送料器的主轴上配合安装有第三减速器,所述第三减速器的动力输入端上配合安装第三正反转电机,所述第一左出口、第二左出口和第三左出口共同与所述左出料管连接,所述第一右出口、第二右出口和第三右出口共同与所述右出料管连接。
7.所述左关闭组件包括设置在所述左出料管上的左直流电机,所述左直流电机的转轴上配合安装左封堵门,所述左封堵门对应设置在所述左出料管的管口上,所述右关闭组件包括设置在所述右出料管上的右直流电机,所述右直流电机的转轴上配合安装右封堵门,所述右封堵门对应设置在所述右出料管的管口上。
8.所述行走分料箱包括箱体和设置在箱体上的行走机构,所述行走机构包括设置于所述箱体前端的一组从动滚轮和设置于所述箱体后端的一组主动滚轮,所述从动滚轮和主动滚轮均设置在所述轨道上,所述主动滚轮的转轴配合安装在第四减速器上,所述第四减速器的动力输入端上配合安装第四正反转电机。
9.所述左猪食槽和右猪食槽内均设置有人字形布料器,所述左猪食槽内的人字形布料器上端进口与所述左出料管底部出口相对应,所述右猪食槽内的人字形布料器上端进口与所述右出料管底部出口相对应。
10.本实用新型的有益效果是:本实用新型结构简单,自动化程度高,可以将生猪不同生长期所需饲料按需求进行装填,根据实际喂料种类进行喂料,简单高效,使用时,利用左猪食槽或右猪食槽位置相对应的接近开关确定猪食槽的位置,在进入工作区后,通过plc控制系统驱动双向送料机构,利用双向送料机构两端的出口,将猪饲料通过左出料管和右出料管,送入左猪食槽和右猪食槽中,其中,左出料管和右出料管的出口上均设置有左料满传感器和右料满传感器,其目的是防止饲料溢出,当检测到左猪食槽和右猪食槽中的饲料要溢出时,关闭左出料管和右出料管的出口上分别设置的左关闭组件和右关闭组件,使得左出料管和右出料管停止下料,plc控制系统控制行走分料箱继续向下一组左猪食槽和右猪食槽移动,并再次进行上述喂料。作为一个优选的技术方案,行走分料箱内部设置初期饲料仓、中期饲料仓和后期饲料仓,针对生猪的三个生长期,通过在初期饲料仓底部设置第一低料位传感器,中期饲料仓底部设置第二低料位传感器,后期饲料仓底部设置第三低料位传感器,来检测料仓内的饲料是否过少,双向送料机构为初期螺旋送料器、中期螺旋送料器和后期螺旋送料器分别对应三个料仓,初期螺旋送料器两端底部分别设置有第一左出口和第一右出口,中期螺旋送料器两端底部分别设置有第二左出口和第二右出口,后期螺旋送料器两端底部分别设置有第三左出口和第三右出口,初期螺旋送料器、中期螺旋送料器和后期螺旋送料器在分别正转或反转时,可以将饲料推向左边的出口,也可以推向右边的出口,而第一左出口、第二左出口和第三左出口共同与左出料管连接,第一右出口、第二右出口和第三右出口共同与右出料管连接,使得左出料管与右出料管分别能够为左猪食槽和右猪食槽喂料。作为一个优选的技术方案,左关闭组件是通过左直流电机带动其转轴上的左封堵门转动,来关闭或者开启左出料管,右关闭组件是通过右直流电机带动其转轴上的右封堵门转动,来关闭或者开启右出料管。作为一个优选的技术方案,行走分料箱包括箱体和设置在箱体上的行走机构,行走机构包括设置于箱体前端的一组从动滚轮和设置于箱体后端的一组主动滚轮,第四正反转电机将动力通过第四减速器传递给主动滚轮的转轴,使得箱体
能够在轨道上移动。进一步的,左猪食槽和右猪食槽内均设置有人字形布料器,人字形布料器能够将左出料管或者右出料管送来的饲料均匀的导入左猪食槽和右猪食槽内,可以防止饲料堆积在一处。
附图说明
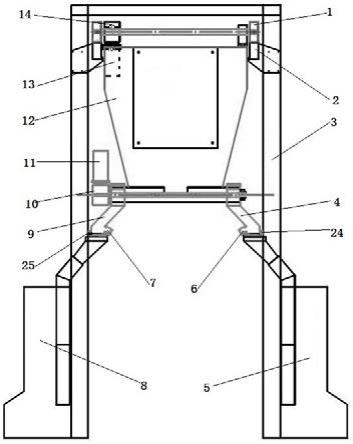
11.图1是本实用新型的结构示意图。
12.图2是图1的左视图。
13.图3是图1的右视图。
14.图4是行走分料箱的俯视图。
15.图5是右关闭组件的结构示意图。
16.图6是左关闭组件的结构示意图。
17.图7是本实用新型的plc控制系统的原理图。
具体实施方式
18.如图1至图3所示,一种多仓式全自动猪饲料喂料装置,包括支架3,支架3上设置轨道2,轨道2上设置行走分料箱12,行走分料箱12内部设置有若干个针对生猪不同生长期专用饲料的料仓, 料仓底部均设置有缺料传感组件,料仓底部均设置有双向送料机构,双向送料机构两端的出口上分别设置有左出料管9和右出料管4,左出料管9和右出料管4的出口上分别设置有左关闭组件和右关闭组件,左出料管9和右出料管4的出口分别与设置于支架3两侧的左猪食槽8和右猪食槽5相对应,轨道2上设置有与左猪食槽8或右猪食槽5位置相对应的接近开关23,左出料管9和右出料管4的出口上均设置有左料满传感器25和右料满传感器24,缺料传感组件、接近开关23以及左料满传感器25和右料满传感器24分别与plc控制系统连接,plc控制系统分别与行走分料箱12的动力组件、双向送料机构的动力组件以及左关闭组件和右关闭组件的动力源连接。
19.如图1至图4所示,行走分料箱12内部设置有若干个针对生猪不同生长期专用饲料的料仓具体为初期饲料仓121、中期饲料仓122和后期饲料仓123,初期饲料仓121底部设置第一低料位传感器28,中期饲料仓122底部设置第二低料位传感器27,后期饲料仓123底部设置第三低料位传感器26,双向送料机构包括初期螺旋送料器、中期螺旋送料器和后期螺旋送料器,初期螺旋送料器水平设置于初期饲料仓121底部出口上,初期螺旋送料器两端底部分别设置有第一左出口和第一右出口,初期螺旋送料器的主轴上配合安装有第一减速器17,第一减速器17的动力输入端上配合安装第一正反转电机16,中期螺旋送料器水平设置于中期饲料仓122底部出口上,中期螺旋送料器两端底部分别设置有第二左出口和第二右出口,中期螺旋送料器的主轴上配合安装有第二减速器19,第二减速器19的动力输入端上配合安装第二正反转电机18,后期螺旋送料器水平设置于后期饲料仓123底部出口上,后期螺旋送料器两端底部分别设置有第三左出口和第三右出口,后期螺旋送料器的主轴上配合安装有第三减速器10,第三减速器10的动力输入端上配合安装第三正反转电机11,第一左出口、第二左出口和第三左出口共同与左出料管9连接,第一右出口、第二右出口和第三右出口共同与右出料管4连接。
20.如图1、图5和图6所示,左关闭组件包括设置在左出料管9上的左直流电机7,左直
流电机7的转轴上配合安装左封堵门22,左封堵门22对应设置在左出料管9的管口上,右关闭组件包括设置在右出料管4上的右直流电机6,右直流电机6的转轴上配合安装右封堵门21,右封堵门21对应设置在右出料管4的管口上。
21.如图1和图2所示,行走分料箱12包括箱体和设置在箱体上的行走机构,行走机构包括设置于箱体前端的一组从动滚轮1和设置于箱体后端的一组主动滚轮15,从动滚轮1和主动滚轮15均设置在轨道2上,主动滚轮15的转轴配合安装在第四减速器14上,第四减速器14的动力输入端上配合安装第四正反转电机13。
22.如图1至图3所示,左猪食槽8和右猪食槽5内均设置有人字形布料器20,左猪食槽8内的人字形布料器20上端进口与左出料管9底部出口相对应,右猪食槽5内的人字形布料器20上端进口与右出料管4底部出口相对应。
23.如图7所示,本实用新型的plc控制系统,包括plc控制器33,plc控制器33与继电器模组32连接,继电器模组32与接线端子31连接,接线端子31分别通过左直流电机正反转控制器30和右直流电机正反转控制器29与左直流电机7和右直流电机6连接,接线端子31分别与第三正反转电机11、第四正反转电机13、第一正反转电机16和第二正反转电机18连接,继电器模组32分别与第一低料位传感器28、第二低料位传感器27和第三低料位传感器26以及接近开关23、右料满传感器24和左料满传感器25连接,继电器模组32为24v12路欧姆龙继电器模组。
24.本实用新型在使用时,将生猪三种生长期的饲料分别装入初期饲料仓121、中期饲料仓122和后期饲料仓123中, plc控制器33通过继电器模组32启动第四正反转电机13,第四正反转电机13通过第四减速器14带动主动滚轮15转动,使得行走分料箱12开始在轨道2上移动,当行走分料箱12移动至与一个左猪食槽8或右猪食槽5位置相对应的接近开关23处时,接近开关23将电信号通过继电器模组32传递给plc控制器33,plc控制器33首先依次通过继电器模组32、左直流电机正反转控制器30和右直流电机正反转控制器29启动左直流电机7和右直流电机6开始正转,左直流电机7和右直流电机6的主轴分别驱动左封堵门22和右封堵门21向下转动开启,左出料管9和右出料管4打开,plc控制器33通过继电器模组32关闭第四正反转电机13,同时启动第三正反转电机11、第一正反转电机16和第二正反转电机18中的任意一个(根据此时生猪的生长期而定),例如,此时为生猪的生长初期,那么便是启动第一正反转电机16,第一正反转电机16通过第一减速器17带动初期螺旋送料器的主轴正转,初期饲料仓121中的饲料通过第一左出口进入左出料管9,在经过左出料管9进入人字形布料器20,最终进入左猪食槽8内,当左出料管9上的左料满传感器25感应到左猪食槽8内的饲料装满将要溢出时,将电信号通过继电器模组32传递给plc控制器33,plc控制器33通过继电器模组32驱动第一正反转电机16开始反转,第一正反转电机16通过第一减速器17带动初期螺旋送料器的主轴反转,初期饲料仓121中的饲料通过第一右出口进入右出料管4,在经过右出料管4进入人字形布料器20,最终进入右猪食槽5内,当右出料管4上的右料满传感器24感应到右猪食槽5内的饲料装满将要溢出时,将电信号通过继电器模组32传递给plc控制器33,plc控制器33通过继电器模组32关闭第一正反转电机16,同时,plc控制器33依次通过继电器模组32、左直流电机正反转控制器30和右直流电机正反转控制器29启动左直流电机7和右直流电机6开始反转,左直流电机7和右直流电机6的主轴分别驱动左封堵门22和右封堵门21转动关闭,plc控制器33再次通过继电器模组32启动第四正反转电机13,第四正反
转电机13通过第四减速器14带动主动滚轮15转动,使得行走分料箱12重新开始在轨道2上移动,当行走分料箱12移动至与下一个左猪食槽8或右猪食槽5位置相对应的接近开关23处时,接近开关23将电信号通过继电器模组32传递给plc控制器33,本实用新型继续上述动作,直到行走分料箱12移动至轨道2末端,此时,所有猪食槽喂料完毕。在整个工作过程中,如果第一低料位传感器28、第二低料位传感器27和第三低料位传感器26检测到相对应的初期饲料仓121、中期饲料仓122和后期饲料仓123中的饲料料位过低时,第一低料位传感器28、第二低料位传感器27和第三低料位传感器26将电信号通过继电器模组32传递给plc控制器33,plc控制器33将信号传递给设置于猪舍外部的储料塔,储料塔将猪饲料通过上料设备注入行走分料箱12中。
25.本实用新型的plc控制系统,其通过第一低料位传感器、第二低料位传感器和第三低料位传感器以及接近开关、右料满传感器和左料满传感器来实时监测本实用新型内各个工作单元的工作状况,实时反馈给plc控制器,plc控制器根据其上预设的参数,适时启动或关闭工作单元,以完成饲料的喂料工作,自动化程度高,适合大面积生猪养殖。
26.其中,plc控制器8的型号为cpm2ah,plc控制器8上还可以连接触摸屏,用于对plc控制器8输入指令参数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1