打草机的制作方法
1.本实用新型涉及一种园林工具技术领域,具体涉及一种打草机。
背景技术:
2.打草机作为一种园林工具通常可以被用来修剪草坪,或者用来修剪墙角、灌木从旁的杂草。
3.打草机包括打草头,打草头上设置有打草绳,当打草头高速转动时,可以带动打草绳一并转动,高速转动的打草绳实现打草的目的。当打草绳被磨损到不足以打草时,用户需要将一根新的打草绳安装至打草头上。打草头通常包括头壳和设置在头壳内的线轴,打草绳可以被缠绕至线轴上。
4.在相关技术中,用户通常需要将头壳打开,将线轴取出,将打草绳缠绕至线轴上,然后再将线轴重新安装至头壳内。这样,使得用户缠绕打草绳的工作比较耗时耗力,工作效率低。而且,用户的手需要触碰打草头,容易弄脏用户的手。
技术实现要素:
5.为解决现有技术的不足,本实用新型的目的在于提供一种如何使用户能够快速且操作简单的安装打草绳的打草机。
6.为了实现上述目标,本实用新型采用如下的技术方案:
7.一种打草机,包括主体,主体包括:打草头,包括用于缠绕打草绳的线轴和容纳至少部分线轴的头壳;驱动装置,用于驱动打草头;打草机还包括用于供用户操作的操作件;打草机具有绕线模式和打草模式;在打草机处于绕线模式时,操作件的运动传递至线轴或头壳以在线轴和头壳之间产生能将打草绳缠绕至线轴的相对运动;在打草机处于打草模式时,驱动装置驱动打草头转动;其中,在打草机处于打草模式时,操作件安装至主体。
8.在一些实施例中,操作件可拆卸的安装至主体。
9.在一些实施例中,操作件不可拆卸的安装至主体。
10.在一些实施例中,操作件包括用于供用户操作的操作部,在打草机由打草模式切换至绕线模式时,操作部的位置发生了变化。
11.在一些实施例中,操作件设置在打草头的上侧。
12.在一些实施例中,打草机还包括用于在操作件和驱动装置之间实现动力传递的离合元件,离合元件具有传动位置和非传动位置;在离合元件处于传动位置时,操作件的运动通过离合元件传递至线轴或头壳,打草机处于绕线模式;在离合元件处于非传动位置时,离合元件断开操作件和打草头之间的动力传递,打草机处于打草模式。
13.在一些实施例中,打草机还包括用于容纳至少部分驱动装置的壳体,操作件连接至壳体,操作件能相对壳体运动至第一位置和第二位置,在操作件运动至第一位置时,操作件驱动离合元件由非传动位置移动至传动位置。
14.在一些实施例中,在操作件处于第一位置时,操作件能相对壳体以第一轴线转动,
离合元件将操作件的转动传递至驱动装置以在头壳和线轴之间产生相对运动。
15.在一些实施例中,操作件与壳体还构成绕第二轴线的转动连接,操作件被设置为在绕第二轴线转动时移动至第一位置和第二位置,第一轴线和第二轴线相互垂直。
16.一种打草机,包括主体,主体包括:打草头,包括用于缠绕打草绳的线轴和容纳至少部分线轴的头壳;驱动装置,包括用于驱动打草头转动的电机;打草机还包括用于供用户操作的操作件;打草机具有绕线模式和打草模式;在打草机处于绕线模式时,操作件的运动传递至线轴或头壳以在线轴和头壳之间产生能将打草绳缠绕至线轴的相对运动;在打草机处于打草模式时,电机驱动打草头转动;其中,主体具有安装件,在打草机处于打草模式时,安装件设置为能在所打草机处于打草模式时安装操作件。
17.本实用新型的有益之处在于:用户能够通过简单的操作快速的将打草绳安装至打草头上,且用户无需直接触碰打草头,避免用户的手被弄脏。
附图说明
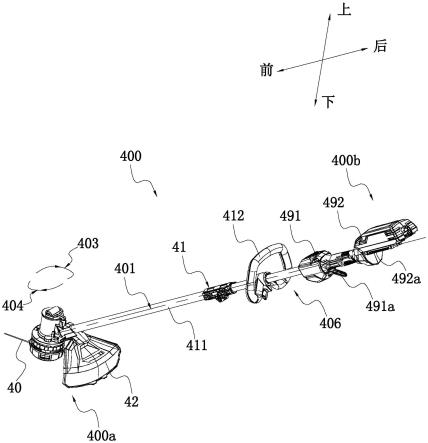
18.图1是第一实施例的打草机的立体图;
19.图2是图1的打草机中的前端装置的立体图;
20.图3是图2中的前端装置的另一视角的立体图;
21.图4是图2中的前端装置去除护罩后的剖视图;
22.图5是图2中的前端装置去除护罩后的爆炸图;
23.图6是图2中的前端装置去除护罩后的另一视角的爆炸图;
24.图7是图2打草机中的前端装置在操作件处于第一位置时的立体图;
25.图8是图4中的操作件、离合装置以及电机轴在操作件处于第二位置时的剖视图;
26.图9图4中的操作件、离合装置以及电机轴在操作件处于第一位置时的剖视图;
27.图10是第二实施例的打草机的剖视图;
28.图11是第三实施例的打草机的前端装置在摇把处于水平位置的立体图;
29.图12是图11中的前端装置在摇把处于竖直位置时的立体图;
30.图13是图12所示结构在摇把处于竖直位置且操作组件处于非绕线状态时的剖视图;
31.图14是图12所示结构在摇把处于竖直位置且操作组件处于绕线状态时的剖视图;
32.图15是图12所示结构在第一视角下的爆炸图;
33.图16是图12所示结构在第二视角下的爆炸图。
具体实施方式
34.如图1所示的第一实施例的打草机400用于修理草坪。具体的,用户可以操作打草机400打断草坪上的草,或者切割灌木或者建筑边上的草。打草机400安装有打草绳40,通过打草绳40的高速旋转以将草打断。
35.打草机400包括:前端装置400a、连接杆组件41以及后端装置400b,前端装置400a设置在连接杆组件41的前端,后端组件设置在连接杆组件41的后端。连接杆组件41包括:连接杆411以及辅助把手412,连接杆411用于连接前端装置400a、后端装置400b以及辅助把手412,连接杆411基本沿第一直线401方向延伸。在其它实施例中,连接杆411也可以沿曲线延
伸。辅助把手412用于供用户辅助握持,辅助把手412可以在连接杆411上沿第一直线401方向进行位置的调节。定义沿第一直线401朝向前端装置400a的方向为前,沿第一直线401朝向后端装置400b的方向为后。
36.后端装置400b包括:主把手491、后壳体61492以及设置在后壳体61492内的电路板组件。主把手491供用户握持。当用户操作打草机400时,可以两只手分别握持主把手491和辅助把手412,从而实现更稳定的操作打草机400。主把手491上还设置有用于启动打草机400给打草机400上电的操作开关491a,打草机400上电后能带动打草绳40高速旋转以切割草。后壳体61492与主把手491一体成型。在其它实施例中,后壳体61492也可以与主把手491分离设置。后壳体61492还形成有结合部492a,结合部492a用于连接能源装置,该能源装置为电池包,电池包用于给打草机400提供电力来源。在其它实施例中,结合部492a也可以连接线缆,线缆可以与市电网连接。在其它实施例中,结合部492a还可以连接其它能源装置,例如,结合部492a可以设置有燃料箱,燃料箱内的燃料可以给打草机400提供能量。
37.如图1和图2所示,前端装置400a包括:打草头50和驱动装置60,打草头50用于安装打草绳40以带动打草绳40高速旋转。驱动装置60用于驱动打草头50转动。
38.前端装置400a还包括:护罩42,护罩42包围至少部分驱动装置60或打草头50。护罩42用于防止草屑溅到用户的身上。打草头50用于安装打草绳40。如图2至图6所示,打草头50包括头壳51和线轴52,线轴52用于缠绕打草绳40,头壳51用于容纳至少部分线轴52。线轴52上形成有绕线部521,头壳51连接有两个穿线元件53,打草绳40的两端分别穿过穿线元件53上的穿线孔531。打草绳40位于头壳51内的部分绕线在绕线部521上。当打草头50高速旋转时,线轴52和头壳51带动打草绳40也高速旋转,转动的打草绳40能够切割草。
39.在本实施例中,头壳51包括上壳体511和下壳体512,线轴52设置在上壳体511和下壳体512之间。上壳体511上还设置有风扇514。当打草头50转动时,头壳51带动风扇514转动,转动的风扇514能够产生流动的气流,气流不仅能够对驱动装置60进行散热,气流还朝向远离打草头50的方向流动从而能阻止草屑缠绕至前端装置400a。
40.驱动装置60设置在打草头50的上侧,驱动装置60用于驱动打草头50转动。在本实施例中,驱动装置60与线轴52连接,驱动装置60驱动线轴52绕第一轴线402转动,线轴52和头壳51之间设置有传动机构。在本实施例中,传动机构包括设置在线轴52上的第一驱动部712522和设置在头壳51上的第一配合部513。当驱动装置60驱动线轴52绕第一轴线402转动时,第一驱动部712522与第一配合部513配合以驱动头壳51随线轴52一并绕第一轴线402转动,从而使得打草机400处于打草模式。在其它实施例中,驱动装置60也可以与头壳51连接,驱动装置60驱动头壳51转动,头壳51通过第一配合部513带动线轴52一并转动。在本实施例中,当打草机400处于打草模式时,驱动装置60驱动打草头50绕第一轴线402沿第一转动方向403转动。如图1所示,第一转动方向403可以为从上向下看时的顺时针方向。可以理解的,在其它实施例中,第一转动方向也可以为从上向下看时的逆时针方向。
41.前端装置400a还包括:操作装置70,操作装置70连接至驱动装置60,操作装置70包括用于供用户操作的操作件71。
42.打草机400还具有绕线模式。当打草机400处于绕线模式时,用户操作操作件71以使得操作件71运动起来,这时操作件71的运动通过驱动装置60传递至线轴52或头壳51以在线轴52和头壳51之间产生能将打草绳40缠绕至线轴52的相对运动。具体而言,当打草绳40
用完后,用户需要安装一根新的打草绳40至打草头50上,这时用户可以使打草绳40穿过穿线孔531使打草绳40一部分位于头壳51内,然后用户操作操作件71,操作件71的运动通过驱动装置60传递至线轴52以驱动线轴52绕第一轴线402沿第二转动方向404转动,线轴52相对头壳51转动,转动的线轴52将打草绳40缠绕至绕线部521。其中,第二转动方向404与第一转动方向403相反,例如,第一转动方向403为顺时针方向,第二转动方向404为逆时针方向。在本实施例中,通过操作件71的运动来驱动线轴52相对头壳51转动,可以使得用户更省力的将打草绳40缠绕至线轴52上。一方面,用户无需将线轴52从头壳51内拆卸下来以缠绕打草绳40,使得绕线的效果更高。另一方面,安装至主把手491上的操作开关491a无需启动,也即是说,当打草机400处于绕线模式时,打草机400无需消耗能源装置的能量,电池包这时无需输出电力,从而节约了能源。再者,打草机400设置并没有启动,仅仅是通过操作装置70的机械运动,即可以将运动通过驱动装置60机械的传递至线轴52,从而保证绕线的可靠性,不会出现绕线失效的情况。另外,操作件71的运动通过驱动装置60传递至线轴52,而无需另外设置用于动力传递的传动装置,可以进一步的减小打草机400的尺寸,降低打草机400的制造成本。
43.如图5所示,第一驱动部712522包括驱动面522a和斜面522b,当线轴52沿第一转动方向403转动时,驱动面522a与第一配合部513接触以驱动头壳51随线轴52转动,打草机400处于打草模式。当线轴52沿第二转动方向404转动时,线轴52的斜面522b与第一配合部513接触,斜面522b不能驱动头壳51随线轴52转动,斜面522b会越过第一配合部513,从而线轴52能相对头壳51沿第二转动方向404转动,这时打草机400处于绕线模式。
44.打草机400还包括用于限制头壳51沿第二转动方向404转动的限位件54,限位件54为连接至上壳体511的单向轴承,单向轴承允许头壳51沿第一转动方向403转动,但是单向轴承不允许头壳51沿第二转动方向404转动。这样,当线轴52沿第一转动方向403转动时,单向轴承不限制头壳51的转动,头壳51能随线轴52一并转动。当线轴52沿第二转动方向404转动时,单向轴承限制头壳51沿第二转动方向404转动,线轴52不能带动头壳51一并转动,这时线轴52相对头壳51产生相对运动,从而将打草绳40缠绕至线轴52上。在其它实施例中,限位件54也可以为其它具有两个状态的限位装置,在其中一个状态下,限位件54允许头壳51转动,在另一个状态下,限位件54阻止头壳51转动。
45.在本实施例中,驱动装置60包括:壳体61和设置在壳体61内的马达,马达具体为电机62。电池包能够给电机62供电,电路板组件与电机62构成电连接以控制电机62。操作开关491a设置为用于启动电机62。当需要打草时,用户按压操作开关491a,操作开关491a给电机62上电,电机62驱动线轴52绕第一轴线402沿第一转动方向403转动,这时打草头50绕第一轴线402高速转动,打草机400处于打草模式。而当需要缠绕打草绳40时,用户操作操作件71,操作件71的运动通过电机62机械的传递至线轴52以驱动线轴52绕第一轴线402沿第二传动方向转动,线轴52和头壳51之间产生相对运动,打草机400处于绕线模式。当打草机400处于绕线模式时,操作开关491a未被操作,电机62没有上电,而仅仅是通过电机62机械的将操作件71的运动传递至线轴52,这样可以降低绕线模式失效的可能性,同时减少了电机62消耗的能量。
46.电机62包括电机轴621,电机轴621沿第一轴线402延伸,电机轴621能绕第一轴线402转动,电机轴621与线轴52连接。在其它实施例中,电机轴621也可以与头壳51连接。在其
它实施例中,电机轴621也可以被设置成绕一个与第一轴线402平行的轴线转动。在其它实施例中,电机轴621也可以被设置为绕一个相对第一轴线402倾斜的轴线转动。
47.壳体61容纳至少部分电机62,打草头50设置在壳体61外,电机轴621从壳体61内伸出至壳体61外并伸入至打草头50中。壳体61还形成有连接孔611,连接杆411插入连接孔611以连接壳体61,从而使得前端装置400a连接在连接杆411的前端。连接杆411的另一端插入主把手491以连接后端装置400b。
48.操作装置70连接至壳体61,操作件71连接至壳体61的外壁,这样,操作件71位于打草头50的上侧,从而方便用户操作。操作件71具体的包括用于供用户操作的操作部711,操作部711设置在打草头50的上侧,这样,当用户操作操作件71时,用户的手能够远离打草头50,不会触碰到打草头50,从而不会弄脏手而影响后续的打草工作。而且操作件71设置在打草头50的上侧还能够避免操作件71自身被草屑缠绕或者操作件71自身会沾上泥土。
49.前端装置400a还包括设置在操作装置70和驱动装置60之间的离合装置65。在本实施例中,离合装置65能连接操作件71和电机轴621。离合装置65设置在电机62远离打草头50的一端。如图8和图9所示,离合装置65具有第一状态和第二状态。在离合装置65处于所述第一状态时,操作件71的运动通过离合装置65传递至驱动装置60,打草机400进入绕线模式。在离合装置65处于第二状态时,离合装置65断开操作件71和驱动装置60之间的动力传递,打草机400脱离绕线模式并进入打草模式。
50.当离合装置65处于第一状态时,离合装置65连接操作装置70和电机轴621,这时操作件71的运动能通过电机轴621传递至线轴52。当离合装置65处于第二状态时,离合装置65断开操作装置70和电机轴621之间的动力传递,这时操作件71的运动不能通过离合装置65传递至电机轴621。
51.事实上,操作件71相对壳体61可以运动至第一位置和第二位置,当操作件71的处于第一位置时,操作件71驱动离合装置65切换至第一状态。而当操作件71运动至第二位置时,操作件71驱动离合装置65切换至第二状态。也即是说,操作件71的第一位置与离合装置65的第一状态相对应,而操作件71的第二位置与离合装置65的第二状态相对应。
52.如图8和图9所示,当用户需要绕线时,可以使得操作件71由第二位置运动至第一位置,这时操作件71驱动离合装置65由第二状态切换至第一状态,离合装置65连接操作件71和电机轴621,并能在操作件71和电机轴621之间实现动力的传递,操作件71可以机械的驱动电机轴621转动。这时用户握持操作件71并使操作件71绕第一轴线402转动,离合装置65也一并随着操作件71绕第一轴线402转动,进而离合装置65带动电机轴621绕第一轴线402转动,转动的电机轴621驱动线轴52相对头壳51沿第二转动方向404转动,从而将打草绳40缠绕至线轴52上。
53.而打草绳40缠绕好之后,用户需要使用打草机400进行打草。这时用户释放操作件71或者驱动操作件71复位至第二位置,离合装置65也复位至第二状态,离合装置65断开操作件71和电机轴621之间的动力传递。这时,用户打开操作开关491a,电机62上电并开始运行,电机轴621转动,转动的电机轴621驱动打草头50高速转动以实现打草,这时,打草机400处于打草模式。当离合装置65处于第二位置且电机轴621转动时,离合装置65不会将电机轴621的运动传递至操作件71,因此这时操作件71是保持不动的。
54.通过设置离合装置65能够实现打草头50在打草模式和绕线模式之间的切换,打草
机400打草时,操作件71不动,当打草机400进行绕线时,电机62也不会上电启动。因此,打草机400的打草模式和绕线模式互不干涉。
55.如图5至图9所示,操作件71相对壳体61能绕第二轴线405转动。操作件71相对壳体61绕第二轴线405转动时能转动至图2所示的第二位置,操作件71还能相对壳体61绕第二轴线405转动至图7所示的第一位置。如图2和图8所示,当操作件71转动至第二位置时,离合装置65复位至第二状态,离合装置65断开操作件71和电机62之间的动力传递。如图7和图9所示,当操作件71转动至第一位置时,操作件71驱动离合装置65切换至第一状态,离合装置65连接操作件71和电机62,这时离合装置65能在操作件71和电机轴621之间实现动力的传递。
56.第二轴线405与第一轴线402相互垂直。壳体61上设置有安装件612,操作件71安装至安装件612并能相对安装件612绕第二轴线405转动。
57.壳体61包括围绕部613和顶部614,围绕部613围绕电机62,顶部614设置在电机62的上侧,顶部614连接至围绕部613的上侧。顶部614上设置有用于安装操作件71的安装件612,从而使得操作件71连接至顶部614。操作件71能相对顶部614绕第二轴线405转动以运动至第一位置和第二位置。操作件71还能驱动安装件612相对围绕部613绕第一轴线402转动。在本实施例中,安装件612与顶部614固定连接,安装件612与顶部614构成同步转动,操作件71、安装件612以及顶部614所构成的整体能相对围绕部613绕第一轴线402转动。在其它实施例中,安装件也可以转动的连接至顶部。当操作件71运动至第一位置时,用户操作操作件71使操作件71绕第一轴线402转动,这时操作件71带动安装件612以及顶部614相对围绕部613绕第一轴线402转动。离合装置65与安装件612构成同步传动。当操作件71位于第一位置时,离合装置65与电机轴621连接,这时操作件71带动安装件612绕第一轴线402转动,则离合装置65也一并随着安装件612绕第一轴线402转动,从而离合装置65驱动电机轴621绕第一轴线402转动,这时离合装置65将操作件71的转动传递至电机轴621,进而可以实现线轴52相对头壳51转动以实现绕线。
58.离合装置65具体包括离合元件651和复位元件652,离合元件651能运动至传动位置和非传动位置,复位元件652为偏压离合元件651朝向非传动位置运动的弹簧。当操作件71被用户操作由第二位置运动至第一位置时,操作件71驱动离合元件651由非传动位置运动至传动位置,这时离合装置65由第二状态切换至第一状态。也即是说,当离合元件651处于传动位置时,离合装置65处于第一状态,当离合元件651处于非传动位置时,离合装置65处于第二状态。具体而言,操作件71形成有驱动部712,该驱动部712为凸轮部。当操作件71由第二位置运动至第一位置时,驱动部712驱动离合元件651沿第一轴线402朝向靠近电机轴621的方向运动,最终使得离合元件651与电机轴621连接,这时离合装置65切换至第一状态。而当离合元件651运动至非传动位置时,离合元件651脱离电机轴621,离合装置65切换至第二状态。安装件612在沿第一轴线402方向的位置保持固定,当操作件71相对安装件612绕第二轴线405由第二位置运动至第一位置时,驱动部712会与离合元件651接触并驱动离合元件651相对安装件612滑动。安装件612与离合元件651构成同步转动,安装件612形成有安装槽612a,离合元件651包括能嵌入安装槽612a内的臂651a。安装槽612a与臂651a配合,安装槽612a与臂651a构成绕第一轴线402的同步转动,同时安装槽612a还允许臂651a沿第一轴线402方向滑动。
59.复位元件652产生驱动离合元件651朝向非传动位置运动的偏压力。当操作件71由
第一位置复位至第二位置时,操作件71允许离合元件651复位至非传动位置,这时复位元件652驱动离合元件651复位至非传动位置,这样能够保证在用户未操作操作件71时使得离合元件651保持在非传动位置,不会影响打草机400进行打草。具体,复位元件652为弹簧,弹簧抵持离合元件651,弹簧产生的偏压力偏压离合元件651朝向远离电机轴621的方向运动。
60.离合元件651形成第一传动部651b,电机轴621形成或者连接第二传动部621a,第一传动部651b和第二传动部621a能相互配合。具体的,离合元件651形成传动孔,传动孔的孔壁形成第一传动部651b,第一传动部651b为第一啮合齿。电机轴621固定连接有驱动轮,驱动轮形成第二传动部621a,第二传动部621a为第二啮合齿。当离合元件651运动至传动位置时,驱动轮伸入至传动孔,第一传动部651b和第二传动部621a啮合,这时离合元件651能驱动电机轴621转动。而当离合元件651运动至非传动位置时,第一传动部651b脱离第二传动部621a。
61.在本实施例中,操作件71至少部分设置在驱动装置60的上侧,这样,用户操作起来更方便,而且用户在绕线时,手也可以远离打草头50,可以避免弄脏手臂651a。
62.具体而言,操作件71还包括连接部713,连接部713用于将操作件71连接至安装件612上。操作件71至少部分设置在打草头50的上侧。在沿第一轴线402方向上,操作件71与打草头50的下端面之间的距离l1大于等于30毫米且小于等于220毫米。这样,使得用户在操作操作部711时,用户的手与打草头50的下端面之间具有一定的距离,用户的手不会触碰到地面,也不会触碰到打草头50的下端面。当打草机400由打草模式切换至绕线模式时,操作部711的位置发生了变化。
63.定义打草机400的除了操作件71之外的部分为主体406,主体406包括:后端装置400b、连接杆组件41、辅助把手412、驱动装置60以及打草头50。在本实施例中,操作件71固定的安装至主体406,具体的,操作件71安装至壳体61上。这样,即使在打草机400处于打草模式时,操作件71也仍然安装至主体406上。从而,无论打草机400处于绕线模式还是打草模式,操作件71均安装在壳体61上,操作件71始终不会脱离主体406,从而可以避免操作件71丢失。
64.在本实施例中,操作件71是固定的安装至安装件612的。当然,在其它实施例中,操作件也可以可拆卸的安装至安装件。或者,在其它实施例中,操作件也可以不可拆卸的安装至安装件。
65.在其它实施例中,当操作件71可拆卸的安装至安装件612时,主体406的其它部位还可以设置有一个能收纳操作件71的收容槽。当打草机400处于绕线模式时,操作件71安装至安装件612。当打草机400处于打草模式时,操作件71安装至收容槽处。这样,即使是在打草机400处于打草模式时,操作件71也仍然能可以安装至主体406,这样可以放置操作件71的丢失。
66.如图2所示,壳体61上还形成有容纳槽615,当操作件71处于第二位置时,操作部711嵌入容纳槽615。当用户未操作操作件71时,容纳槽615能够限制操作件71脱离容纳槽615,从而可以避免操作件71的晃动。
67.如图7和图8所述,操作部711还包括滚轮711a,滚轮711a可转动的连接至连接部713,这样用户可以通过操作滚轮711a来操作操作件71,从而可以使得用户的操作更省力。
68.在本实施例中,当打草机400处于绕线模式时,用户转动操作件71绕第一轴线402
转动,操作部711与第一轴线402之间的距离l2大于等于40毫米且小于等于100毫米。这样,用户转动操作件71时能够更省力,同时避免操作件71过大而影响前端装置400a的尺寸。
69.如图10所示的第二实施例的打草机700,其包括连接杆701、后端装置以及前端装置73。前端装置73包括:壳体731、电机732、驱动装置733以及打草头734。壳体731容纳驱动装置733和电机732,驱动装置733设置在电机732和打草头734之间以连接电机732和打草头734,驱动装置733将电机732输出的动力传递至打草头734。打草头734包括线轴734a和头壳734b,电机732通过驱动装置733驱动线轴734a或头壳734b,从而实现打草头734绕第一轴线转动。前端装置73还包括操作装置735,操作装置735设置为能连接至驱动装置733。操作装置735包括能连接至驱动装置733的操作件735a,操作件735a的运动通过驱动装置733传递至线轴734a或头壳734b,而无需通过电机732将动力传递至线轴734a或头壳734b。当打草机700处于绕线模式时,操作件735a转动以驱动驱动装置733转动,驱动装置733再驱动线轴734a或头壳734b转动以在线轴734a和头壳734b之间产生相对运动。当打草机700处于打草模式时,操作件735a脱离驱动装置733,电机732驱动驱动装置733转动,驱动装置733驱动线轴734a或头壳734b以驱动打草头734转动。
70.图11所示为第三实施例的打草机中的前端装置100a,第三实施例的打草机与第一实施例的打草机具有相同的后端装置、连接杆,第三实施例的前端100a与第一实施例的前端装置400a相同的打10。第三实施例的20的功能也基本与第一实施例相同,区别在于驱动装置20的具体结构与第一实施例不同。第三实施例的操作装置30相对第一实施例的操作装置70能实现基本相同的功能,区别仅在于第三实施例的操作装置30具体结构与第一实施例的操作装置70的具体结构不同。
71.如图11所示,前端装置100a包括打草头10和驱动装置20,打草头10用于打草,驱动装置20用于驱动打草头10以转动轴线101为轴转动
72.如图11至图16所示,驱动装置20包括马达21、马达壳体212以及传动组件22。马达21用于驱动打草头10转动,马达21具体可以包括马达轴211,在本实施例中,马达21也以转动轴线101为轴转动。当然,可以理解的是,在其它实施例中,马达轴211也可以不以转动轴线101为轴转动,例如马达轴211可以以平行于转动轴线101的直线为轴转动,马达轴211还可以以垂直于转动轴线101的直线为轴转动。马达壳体212用于容纳马达21。马达壳体212可以形成有容纳腔,马达21设置在容纳腔内。传动组件22用于在马达21和打草头10之间实现动力的传递。
73.马达211具体为电机,该电机进一步的为无刷电机,更一步而言,该电机为外转子无刷电机,电机包括转子组件和定子组件,其中,转子组件包括转子轴,转子轴即为马达轴211。
74.打草头10用于驱动打草绳102高速旋转以切割植被,打草头10包括头壳11和线轴12。其中,线轴用于缠绕打草绳102,头壳11用于容纳线轴12。线轴12设置在头壳11所围绕而成的容纳空间内。
75.前端装置100a还包括设置在驱动装置20上的可供用户操作的操作装置30,操作装置30可被操作以进行绕线。
76.进一步地,操作装置30包括绕线状态和非绕线状态。当操作装置30处于绕线状态时,操作装置30与马达21传动连接以驱动打草头10,使得线轴12和头壳11之间产生以转动
轴线101为轴的相对转动,以进行绕线;当操作装置30处于非绕线状态时,操作装置30与马达21分离。
77.具体而言,打草机具有自动绕线模式、手动绕线模式和打草模式,当然也可以认为是打草头10具有自动绕线模式、手动绕线模式和打草模式。当打草头10处于自动绕线模式时,马达21可以驱动线轴12相对头壳11以转动轴线101为轴沿第一转动方向转动从而将打草绳102自动的缠绕至线轴12上。当打草头10处于手动绕线模式时,此时操作装置30处于绕线状态,用户可以通过操作装置30使线轴12相对头壳11以转动轴线101为轴沿第一转动方向转动,这时打草绳102也能够被缠绕至线轴12上。而当用户通过操作操作开关启动马达21时,马达21能够驱动线轴12以转动轴线101为轴沿第二转动方向转动从而使得打草机处于打草模式。在本实施例中,从马达21看向打草头10,第一转动方向可以认为是逆时针方向,对应的,第二转动方向可以认为是顺时针方向,当然并不以此为限。可以理解的,在其它实施例中,马达轴211还可以与头壳11连接以驱动头壳11转动,这样,当打草头10处于自动绕线模式时,马达21驱动头壳11转动以使线轴12相对头壳11产生沿第一转动方向转动的相对转动从而将打草绳102自动地缠绕至线轴12上,同样的,操作装置30可以与头壳11连接,当打草头10处于手动绕线模式时,用户操作操作装置30带动头壳11转动以使线轴12相对头壳11产生沿第一转动方向转动的相对转动从而将打草绳102缠绕至线轴12。
78.这样,打草头10既可以从马达21的一侧将动力传递至线轴12以自动的缠绕打草绳102,也可以从操作装置30的一侧将动力传递至线轴12以将打草绳102缠绕至线轴12,从而使得用户既可以通过触发操作开关来自动缠绕打草绳102,也可以通过操作装置30来手动缠绕打草绳102,从而真正实现了一种集手动、自动一体化的打草机。这样,一方面,当用户通过转动操作装置30来缠绕打草绳102时,用户可能会感觉到疲劳,这时用户可以通过操作操作开关以自动的将打草绳102缠绕至线轴12,从而方便了用户的操作,提高了工作的效率。另外,当打草机的自动绕线模式失效时,用户也可以通过操作装置30来手动的将打草绳102缠绕至线轴12,从而提高了打草机的可靠性能;且能够避免手动绕线时因人手直接接触打草头带来的缠线以及人手被弄脏的问题,提升绕线速度和用户体验,提高工作效率。
79.操作装置30具体包括摇把31和旋转按钮32,摇把31铰接于旋转按钮32的顶部,摇把31用于在操作装置30处于绕线状态时向下按压旋转按钮32以使得旋转按钮32与马达21的马达轴211连接,并通过外力转动摇把31实现绕线;在操作装置30处于非绕线状态时,旋转按钮32与马达轴211处于分离状态。具体地,摇把31能由竖直位置(与转动轴线101平行的位置)转动到水平位置,当摇把31位于竖直位置时,向下按压摇把31以驱动旋转按钮32向下与马达轴211连接,可以理解的是,摇把31处于倾斜位置时,也可以向下按压摇把31进行绕线操作,但工作效率较低。
80.进一步地,操作装置30还包括弹性复位件33,其两端分别作用于旋转按钮32和马达壳体212。在绕线状态时,弹性复位件33处于压缩状态;在非绕线状态时,旋转按钮32与马达轴211在弹性复位件33的作用下处于分离状态。通过设置弹性复位件33,实现了操作装置30绕线状态和非绕线状态的快速切换,结构简单、易于实现,且成本低廉。
81.马达21还包括轴套213,轴套213套设在马达轴211的顶端并能带动马达轴211转动。在绕线状态时,旋转按钮32与轴套213连接,从而实现与马达轴211的传动连接;在非绕线状态时,旋转按钮32与轴套213处于分离状态。通过设置轴套213,能避免马达轴211的磨
损,延长马达轴211的使用寿命。
82.操作装置30还包括环形盖板34,环形盖板34连接于马达壳体212的顶部并与马达壳体212之间形成容纳腔,旋转按钮32位于容纳腔内,摇把31至少部分位于环形盖板34的外侧以能被操作。在操作装置30处于非绕线状态时,旋转按钮32与马达轴211的轴套213在弹性复位件33的作用下处于分离状态;在操作装置30处于绕线状态时,用户需要将摇把31翻至竖直位置,然后通过摇把31按压旋转按钮32直至旋转按钮32与马达轴211上的轴套213配合好后转动摇把31即可实现绕线,绕线动作完成后,松开摇把31并把摇把31置于水平位置即可。
83.进一步地,环形盖板34上设有定位槽341,摇把31的一端铰接于旋转按钮32,另一端能够抬起至竖直位置或放平至水平位置卡接于定位槽341中。通过设置定位槽341,便于收纳摇把31。更进一步地,环形盖板34外周上远离摇把31和旋转按钮32铰接处的一侧设置有扣手槽342,扣手槽342和定位槽341相连通,通过设置扣手槽342方便人手操作抬起摇把31。
84.优选地,旋转按钮32的截面呈t字型,包括垂直连接的限位部321和旋转部322。摇把31铰接于限位部321的顶面,在非绕线状态时,在弹性复位件33的作用下,限位部321的上表面与环形盖板34的内顶面相抵接,即环形盖板34的内顶面对旋转按钮32起到一定的限位作用;在绕线状态时,在摇把31的按压作用下,限位部321与环形盖板34的内顶面之间间隔一定距离。旋转部322连接于限位部321的下表面,旋转部322用于与轴套213连接,具体可以为卡接。
85.进一步地,旋转部322的中部设有卡孔,轴套213与卡孔卡接。优选地,卡孔为异形孔,轴套213的外周形状与异形孔的形状相适配,以实现随旋转部322转动。通过设置异形结构,省去了连接件,节省成本,且可靠性较高。
86.弹性复位件33套设于旋转部322的外周,马达壳体212上设置有限位凹槽,弹性复位件33的上端抵接于限位部321和旋转部322之间,下端位于限位凹槽中。优选地,弹性复位件33为宝塔形弹簧。宝塔形弹簧具有体积小、载荷大等优点,适用于狭小空间小,且具有一定的减震作用,能保证绕线过程的平稳进行。
87.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本实用新型,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1