株间自动仿地形避让除草机的制作方法
1.本实用新型涉及除草机械技术领域,具体地,涉及一种株间自动仿地形避让除草机。
背景技术:
2.除草通常采用的方式有化学药剂除草、人工除草及机械除草。其中,化学药剂除草会对土壤带来不良影响,且对作物生长产生一定的抑制作用;人工除草所消耗人力巨大、效率低,不适宜大面积种植除草;机械除草能够避免以上两种方式存在的缺陷,因此在农业种植中得到了迅速的发展和广泛的应用。但是,除草机械同样存在自身的一些局限性,科研机构对于除草机械也不断进行研究开发,以拓展除草机械的应用。
3.中国农业大学徐丽明,丁物物等人研究的篱架式裁培葡萄株间除草机。整机的关键部件是自动避让机构,通过机械触杆来确定是否遇到果树,遇到果树后,机械触杆将阻力传递给避让触发机构中的压力传感器,在达到阈值时,自动避让机构开始工作,除草单元移出葡萄行,进入行间,该机具可以调节不同的压力阈值来实现适应不同生长期的葡萄树除草作业,一定程度上增加了机具的适应性,减少了损伤葡萄植株的几率。在后来的研究中,中国农业大学于畅畅,徐丽明等人针对篱架式栽培葡萄园中株间除草机作业效率不高。
4.中国农业大学于畅畅,徐丽明等人针对篱架式栽培葡萄园中株间除草机作业效率不高,研制了一种篱架式栽培葡萄双边作业株间自动避让除草机。该机具能够适应篱架式栽培葡萄园的株间除草,但株间除草存在一定死角,且不能进行行间除草,所以并不适用于果园除草要求。
5.南京林业大学陈勇等人研究出一种能做到同时去除行间和株间杂草的机器人。主要包括行间与株间除草刀具、影像识别装置、gps装置与控制装置。通过gps进行位置导航,机器人沿作物行线前进,当机器人影像识别装置感应到杂草时,除草执行机构就会进行除草动作,末端执行装置会将高速旋转的刀具迅速伸入土壤,破坏杂草组织。当机器人感应出农作物时,除草机构的末端执行装置就会迅速张开以防止损伤农作物。
6.济南大学杜文圣、王睿晗等人针对蓬莱市葡萄园矮化密植的种植模式,研究了一种能够完成葡萄园行间与株间杂草去除的自动避让除草机。该机具在拖拉机的牵引下,将一部分动力通过传动系统传至卧式除草刀,进行植株行间除草;而另一部分动力利用液压系统传递至液压执行元件,用于去除株间杂草。并研究了株间除草装置回转中心的运动轨迹,得出在相同的前进速度下,液压缸的回位速度与除草过程中的伤树率成正比,与株间除草率成反比。
7.可见,目前机械除草存在的主要问题是,如何识别作物与杂草,在除草过程中遇到作物时及时自动避让,避免除草操作时对周边作物造成损害,同时控制除草深度,从根部除草,避免除草不彻底或从根部复活,以提高除草效率。
技术实现要素:
8.本实用新型要解决的技术问题在于,提供了一种株间自动仿地形避让除草机,通过设计精准的避让机构,在除草过程中遇到作物时采集作物信号,并自动迅速避让,避免除草操作时对周边作物造成损伤,同时能够从根部除草,提高除草效率。
9.本实用新型提供了一种株间自动仿地形避让除草机,包括伸缩机架、避让机构、割草机构、除草机构、角度调节机构及液压系统,所述避让机构设于伸缩机架的侧部,割草机构和除草机构安装于避让机构上且割草机构位于除草机构的前方,其中:
10.所述伸缩机架包括固定架,所述固定架前端安装三角悬挂架,固定架上连接活动套,活动架可活动套设于活动套内,固定架上安装宽度调节液压缸,宽度调节液压缸的活动端与活动套连接;
11.所述避让机构包括固定连接于活动架上的避让轴座,避让轴座上平行连接伸缩臂及导轨,活动架上安装第一避让液压缸,第一避让液压缸的活动端连接于伸缩臂的一侧,导轨上设有避让座,避让座的上侧设有滑轨,滑轨上固定安装固定块,固定块与触板通过回力弹簧连接,触板可滑动配装于滑轨上,避让座的侧壁设有内六角轴承,内六角轴承内配装六角转轴,六角转轴上连接推杆,推杆与触板的一侧接触连接,导轨上固定设有行程开关,且行程开关位于触板一侧,六角转轴的下端连接信号采集组件;
12.所述割草机构包括连接于伸缩臂上的第一轴座,第一轴座上水平铰接割草架,割草架上设有液压马达,液压马达的动力输出端连接主动轮,主动轮通过皮带与从动轮连接,从动轮的轮轴上连接割草盘;
13.所述除草机构包括连接于伸缩臂末端的第二轴座,第二轴座上连接转杆,转杆的下端连接拉板和除草刀,避让座上安装第二避让液压缸,第二避让液压缸的活动端与拉板铰接;
14.所述角度调节机构包括安装于固定架两侧的地轮,所述地轮的轮轴通过角度调节组件连接于活动架后方,活动架后方安装高低调节液压缸,高低调节液压缸的活动端与角度调节组件连接;
15.所述液压系统包括液压油箱,液压油箱与液压泵连接,液压泵的出液端连接过滤器,过滤器的出液端分别与复合电磁阀和避让电磁阀连接,避让电磁阀分别与第一避让液压缸和第二避让液压缸连接,复合电磁阀分别与高低调节电磁阀及宽度调节电磁阀连接,高低调节电磁阀连接高低调节液压缸,宽度调节电磁阀连接宽度调节液压缸,且高低调节电磁阀及宽度调节电磁阀分别与液压马达连接。
16.优选的,所述信号采集组件包括连接于六角转轴的下端的触杆座,触杆座上设有触杆转轴,触杆转轴上设有触碰杆,触碰杆的侧壁连接归位弹簧,归位弹簧的另一端与触杆座连接。
17.优选的,所述角度调节组件包括平行配装于轴承上的轴承梁,轴承梁上铰接三角座,三角座上铰接调节杆,调节杆的另一端与活动架铰接,三角座的后侧连接调节座,调节座与高低调节液压缸的活动端连接。
18.优选的,所述除草刀的刀刃向上倾斜45
°
。
19.优选的,所述主动轮与从动轮上设有皮带轮护罩。
20.优选的,所述液压系统还包括风冷却器。
21.优选的,还包括控制系统,所述控制系统的信号输出端分别与复合电磁阀、高低调节电磁阀、宽度调节电磁阀及避让电磁阀电性连接。
22.本实用新型的工作原理:
23.(1)整机除草原理:本实用新型的株间自动仿地形避让除草机,包括伸缩机架、避让机构、割草机构、除草机构、角度调节机构及液压系统,伸缩其中:所述机架是整机部件的安装载体,液压系统各元件安装在机架上方,三点悬挂与机架分开安装,以此来实现仿地形除草的效果,与拖拉机悬挂系统相连;所述液压系统主要由液压油箱、电磁阀组、风冷却器、液压泵、与宽度调节液压缸、高低调节液压缸和避让液压缸等连接组成,液压马达为割草刀盘旋转提供动力,行宽调节液压缸为行宽调节机构提供动力,实现对作业行宽调节,避让液压缸使除草部件进出株间,实现避开葡萄藤的功能;地轮安装在机架后方,通过高低调节液压缸来自动调节地轮的高度,可改变除草刀的入土深度;通过液压马达来达到割草刀运作的效果,并通过皮带轮的形式来改变割草刀旋转的转速;
24.(2)液压系统工作原理:工作时,由拖拉机动力源将动力传输给液压泵,液压泵分两个出油口,分别进入复合电磁阀和避让电磁阀中。复合电磁阀分别控制高低调节电磁阀和左右宽度电磁阀,由高低调节电磁阀和宽度调节电磁阀控制液压缸的动作,再通过复合电磁阀的回油进入液压马达,再通过马达的回油回到油箱;避让电磁阀直接控制避让液压缸的动作。系统油液路线如下:
25.遇树前,进油路:泵
→
过滤器
→
复合电磁阀
→
高低调节电磁阀
→
高低调节液压缸;泵
→
过滤器
→
复合电磁阀
→
宽度调节电磁阀
→
宽度调节液压缸;泵
→
过滤器
→
避让电磁阀
→
避让液压缸;
26.回油路:高低调节液压缸
→
高低调节电磁阀
→
过滤器
→
液压马达
→
油箱;高低调节液压缸
→
高低调节电磁阀
→
过滤器
→
液压马达
→
油箱;第一避让液压缸与第二避让液压缸
→
第一避让电磁阀与第二避让电磁阀
→
油箱;
27.遇树时,系统油液路线如下:行程开关输入电信号
→
避让电磁阀
→
避让液压缸;行程开关输入电信号
→
高低调节电磁阀
→
高低调节液压缸。
28.本实用新型的有益效果:
29.(1)活动机架:为达到仿地形的效果,将三点悬挂与机架分开,这样可以根据葡萄地实际情况自动作业宽度、机架高度及除草刀的入土深度,更好的实现葡萄地淤积型特殊种植模拟的除草作业;
30.(2)避让机构:采用双液压缸伸缩臂,通过双液压缸控制除草刀旋转角度,通过两级液压缸控制,除草刀摆动角度更大,使得株间除草范围更广;
31.(3)割草机构与除草机构结合:通过平刀+割草盘装置,在前方利用割草盘的刀片高速旋转除掉触碰杆前方的大草,导致触碰杆不会因为碰到大草而直接产生避让。且割草刀的刀刃具有45
°
的角度,保证在除草过程中,除过的草的根部可以向后翻转,草根外露的目的,防止草复活;
32.(4)角度调节机构:采用仿地形地轮,将轮轴与机架主体通过角度调节装置连接,在机具运行过程中,可根据不同地形调节轮轴与机架相对角度,确保机具平稳运行,同时通过高低液压液压缸控制除草刀入土深度。
附图说明
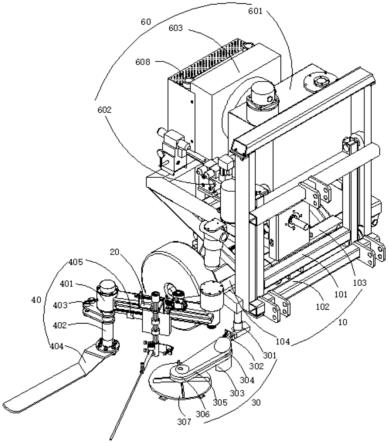
33.图1为本实用新型株间自动仿地形避让除草机的立体图;
34.图2为本实用新型株间自动仿地形避让除草机的俯视图;
35.图3为本实用新型株间自动仿地形避让除草机的后视图;
36.图4为本实用新型株间自动仿地形避让除草机的局部放大图;
37.图5为图1中避让机构的局部放大图;
38.图6为角度调节机构的局部放大图;
39.图7为本实用新型液压系统连接图。
40.图中:
41.伸缩机架10,固定架101,三角悬挂架102,活动套103,活动架104,宽度调节液压缸105;
42.避让机构20,避让轴座201,伸缩臂202,导轨203,第一避让液压缸204,避让座205,滑轨206,固定块207,触板208,回力弹簧209,内六角轴承210,内六角轴承210,六角转轴211,推杆212,卡台214,信号采集组件214,触杆座214-1,触杆转轴214-2,触碰杆214-3,归位弹簧214-4;
43.割草机构30,第一轴座301,割草架302,液压马达303,主动轮304,皮带305,从动轮306连接,割草盘307,皮带轮护罩308;
44.除草机构40,第二轴座401,转杆402,拉板403,除草刀404,第二避让液压缸405;
45.角度调节机构50,地轮501,角度调节组件502,轴承梁502-1,三角座502-2,调节杆502-3,调节座502-4,高低调节液压缸503;
46.液压系统60,液压油箱601,液压泵602,过滤器603,复合电磁阀604,避让电磁阀605,高低调节电磁阀606,宽度调节电磁阀607,风冷却器608。
具体实施方式
47.为了使本实用新型技术方案更容易理解,现结合附图采用具体实施例的方式,对本实用新型的技术方案进行清晰、完整的描述。
48.实施例1:
49.如图1至图7所示,本实施例的株间自动仿地形避让除草机,包括伸缩机架10、避让机构20、割草机构30、除草机构40、角度调节机构50及液压系统60,所述避让机构20设于伸缩机架10的侧部,割草机构30和除草机构40安装于避让机构20上且割草机构30位于除草机构40的前方,其中:
50.所述伸缩机架10包括固定架101,所述固定架101前端安装三角悬挂架102,固定架101上连接活动套103,活动架104可活动套设于活动套103内,固定架上安装宽度调节液压缸105,宽度调节液压缸105的活动端与活动套103连接;
51.所述避让机构20包括固定连接于活动架104上的避让轴座201,避让轴座201上平行连接伸缩臂202及导轨203,活动架104上安装第一避让液压缸204,第一避让液压缸204的活动端连接于伸缩臂202的一侧,导轨203上设有避让座205,避让座205的上侧设有滑轨206,滑轨206上固定安装固定块207,固定块207与触板208通过回力弹簧209连接,触板208可滑动配装于滑轨206上,避让座205的侧壁设有内六角轴承210,内六角轴承210内配装六
角转轴211,六角转轴211上连接推杆212,推杆212与触板208的一侧接触连接,导轨203上固定设有行程开关213,且行程开关位于触板208一侧,六角转轴211的下端连接信号采集组件214;
52.所述割草机构30包括连接于伸缩臂202上的第一轴座301,第一轴座301上水平铰接割草架302,割草架302上设有液压马达303,液压马达303的动力输出端连接主动轮304,主动轮304通过皮带305与从动轮306连接,从动轮306的轮轴上连接割草盘307;
53.所述除草机构40包括连接于伸缩臂202末端的第二轴座401,第二轴座401上连接转杆402,转杆402的下端连接拉板403和除草刀404,避让座205上安装第二避让液压缸405,第二避让液压缸405的活动端与拉板403铰接;
54.所述角度调节机构50包括安装于固定架101两侧的地轮501,所述地轮501的轮轴通过角度调节组件502连接于活动架104后方,活动架后方安装高低调节液压缸503,高低调节液压缸503的活动端与角度调节组件502连接;
55.所述液压系统60包括液压油箱601,液压油箱601与液压泵602连接,液压泵602的出液端连接过滤器603,过滤器603的出液端分别与复合电磁阀604和避让电磁阀605连接,避让电磁阀605分别与第一避让液压缸204和第二避让液压缸405连接,复合电磁阀604分别与高低调节电磁阀606及宽度调节电磁阀607连接,高低调节电磁阀606连接高低调节液压缸503,宽度调节电磁阀607连接宽度调节液压缸105,且高低调节电磁阀606及宽度调节电磁阀607分别与液压马达303连接。
56.实施例2:
57.如图1至图7所示,本实施例的株间自动仿地形避让除草机,包括伸缩机架10、避让机构20、割草机构30、除草机构40、角度调节机构50及液压系统60,所述避让机构20设于伸缩机架10的侧部,割草机构30和除草机构40安装于避让机构20上且割草机构30位于除草机构40的前方,其中:
58.所述伸缩机架10包括固定架101,所述固定架101前端安装三角悬挂架102,固定架101上连接活动套103,活动架104可活动套设于活动套103内,固定架上安装宽度调节液压缸105,宽度调节液压缸105的活动端与活动套103连接;
59.所述避让机构20包括固定连接于活动架104上的避让轴座201,避让轴座201上平行连接伸缩臂202及导轨203,活动架104上安装第一避让液压缸204,第一避让液压缸204的活动端连接于伸缩臂202的一侧,导轨203上设有避让座205,避让座205的上侧设有滑轨206,滑轨206上固定安装固定块207,固定块207与触板208通过回力弹簧209连接,触板208可滑动配装于滑轨206上,避让座205的侧壁设有内六角轴承210,内六角轴承210内配装六角转轴211,六角转轴211上连接推杆212,推杆212与触板208的一侧接触连接,导轨203上固定设有行程开关213,且行程开关位于触板208一侧,六角转轴211的下端连接信号采集组件214;
60.所述割草机构30包括连接于伸缩臂202上的第一轴座301,第一轴座301上水平铰接割草架302,割草架302上设有液压马达303,液压马达303的动力输出端连接主动轮304,主动轮304通过皮带305与从动轮306连接,从动轮306的轮轴上连接割草盘307;
61.所述除草机构40包括连接于伸缩臂202末端的第二轴座401,第二轴座401上连接转杆402,转杆402的下端连接拉板403和除草刀404,避让座205上安装第二避让液压缸405,
第二避让液压缸405的活动端与拉板403铰接;
62.所述角度调节机构50包括安装于固定架101两侧的地轮501,所述地轮501的轮轴通过角度调节组件502连接于活动架104后方,活动架后方安装高低调节液压缸503,高低调节液压缸503的活动端与角度调节组件502连接;
63.所述液压系统60包括液压油箱601,液压油箱601与液压泵602连接,液压泵602的出液端连接过滤器603,过滤器603的出液端分别与复合电磁阀604和避让电磁阀605连接,避让电磁阀605分别与第一避让液压缸204和第二避让液压缸405连接,复合电磁阀604分别与高低调节电磁阀606及宽度调节电磁阀607连接,高低调节电磁阀606连接高低调节液压缸503,宽度调节电磁阀607连接宽度调节液压缸105,且高低调节电磁阀606及宽度调节电磁阀607分别与液压马达303连接。
64.所述信号采集组件214包括连接于六角转轴211的下端的触杆座214-1,触杆座214-1上设有触杆转轴214-2,触杆转轴214-2上设有触碰杆214-3,触碰杆214-3的侧壁连接归位弹簧214-4,归位弹簧214-4的另一端与触杆座214-1连接。
65.所述角度调节组件502包括平行配装于轴承上的轴承梁502-1,轴承梁502-1上铰接三角座502-2,三角座502-2上铰接调节杆502-3,调节杆502-3的另一端与活动架104铰接,三角座502-2的后侧连接调节座502-4,调节座502-4与高低调节液压缸503的活动端连接。
66.所述除草刀404的刀刃向上倾斜45
°
。
67.所述主动轮304与从动轮306上设有皮带轮护罩308。
68.所述液压系统60还包括风冷却器608。
69.还包括控制系统,所述控制系统的信号输出端分别与复合电磁阀604、高低调节电磁阀606、宽度调节电磁阀607及避让电磁阀605电性连接。
70.应当注意,在此所述的实施例仅为本实用新型的部分实施例,而非本实用新型的全部实现方式,所述实施例只有示例性,其作用只在于提供理解本
技术实现要素:
更为直观明了的方式,而不是对本实用新型所述技术方案的限制。在不脱离本实用新型构思的前提下,所有本领域普通技术人员没有做出创造性劳动就能想到的其它实施方式,及其它对本实用新型技术方案的简单替换和各种变化,都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1