一种浮动式深耕粉碎松土机的制作方法
1.本实用新型涉及松耕粉垄机,具体涉及一种浮动式深耕粉碎松土机。
背景技术:
2.松耕粉垄是利用设备对土壤进行深耕粉碎,粉垄后不会乱土层,粉垄后能扩充土壤的养分、水分和氧气,提高产能。现有的深松耕机主要有两种,一种是通过拖拉机带动粉垄头,一种是通过新研发的行走机械带动粉垄头,这种机械主要包括行走机构、机架、驾驶室、动力系统和粉垄装置。上述两种松耕机的行走机构有两种,一种为轮式行走机构,一种为两侧各一条履带的履带式行走机构。
3.对于轮式行走机构来说,在松耕过程中,由于地面不平,而刀具是伸入到土壤中,土壤对刀具具有一定的阻力,这样,整个设备的震动大,对设备的损伤大,另外,刀具的松耕深度会根据设备的颠簸会发生变化,造成松耕深度不一致;轮式深松耕机在爬坡和下坡过程中,需要将刀具抬升较高才不会让刀具与土壤干涉,另外,当设备运动到坡顶上时,前轮会先进入到下坡面上,而后轮还在上坡面上,如果坡度太大,坡顶就会顶置到机架上,造成设备无法行走。
4.另外,现有的深耕松土设备在松土作业行进过程时,由于泥土松紧不一,底面不平,导致深耕松土设备无法按照预计的直线行驶,松耕路径弯曲不直,种植面积减少,从而导致耕作收益减少。同时现有的深耕松土设备的控制油路复杂;进行操作时部分油路出现相互干涉;工作效率低。
技术实现要素:
5.本实用新型提供一种浮动式深耕粉碎松土机,电控系统能够实时获取粉松压力、装置压力、前进压力和后退压力的信息,使得驾驶员能够更好的控制深耕粉碎松土机;液压系统采用统一的驱动模块对不同的执行元件进行驱动控制,使得油路之间的连接简洁统一,且不同的执行元件由与自身对应的驱动模块进行控制,使得每个执行元件的油路之间不会相互影响,由此提高工作的效率。
6.为达到上述目的,本实用新型的技术方案是:一种浮动式深耕粉碎松土机,包括液压系统和电控系统,液压系统包括驱动模块和执行模块,所述驱动模块包括一个以上的执行驱动模块,所述执行驱动模块连接油箱,所述执行模块包括粉碎松土执行模块和移动执行模块,所述粉碎松土执行模块包括粉松马达油路、举升油缸油路、转角油缸油路和转向油缸油路,所述举升油缸油路、转角油缸油路和转向油缸油路通过油缸液压泵油路连接油箱。
7.所述执行驱动模块包括变量控制油路、平衡油路、控制阀油路和执行液压泵油路,所述执行液压泵油路连接油箱,执行液压泵油路还与平衡油路连接,所述平衡油路连接控制阀油路,所述控制阀油路还与变量控制油路连接,所述变量控制油路与粉松马达油路连接。
8.所述执行液压泵油路包括执行液压泵、执行溢流阀和过滤器,所述执行液压泵的
一端连接油箱,执行液压泵的另一端连接过滤器的一端,位于执行液压泵与过滤器之间设置有执行溢流阀,所述执行溢流阀连接油箱,过滤器的另一端与平衡油路连接。
9.所述平衡油路包括平衡第一弹簧式单向阀、平衡第二弹簧式单向阀、平衡第一先导式溢流阀、平衡第二先导式溢流阀、平衡第一溢流阀、平衡第二溢流阀、平衡第一单向阀、平衡第二单向阀、第一截止阀和第二截止阀,所述过滤器的另一端连接平衡第一弹簧式单向阀和平衡第二弹簧式单向阀的一端,所述平衡第一弹簧式单向阀的另一端连接平衡第一先导式溢流阀的一端,所述平衡第一先导式溢流阀的另一端连接平衡第一溢流阀的一端,所述平衡第一溢流阀的另一端连接平衡第一单向阀的一端,所述平衡第一单向阀的另一端与平衡第一溢流阀的一端连接,第一截止阀与平衡第一单向阀并联设置,所述平衡第二弹簧式单向阀的另一端连接平衡第二先导式溢流阀的一端,所述平衡第二先导式溢流阀的另一端连接平衡第二溢流阀的一端,所述平衡第二溢流阀的另一端连接平衡第二单向阀的一端,所述平衡第二单向阀的另一端与平衡第二溢流阀的一端连接,第二截止阀与平衡第二单向阀并联设置,所述平衡第一先导式溢流阀和平衡第二先导式溢流阀与控制阀油路连接。
10.所述控制阀油路包括控制三位五通电磁换向阀、控制三位四通电磁换向阀、控制单向阀和控制节流阀,平衡第二先导式溢流阀与控制三位五通电磁换向阀的tp端连接,所述控制三位五通电磁换向阀的ta端与控制三位四通电磁换向阀的up端连接,所述控制三位四通电磁换向阀的ua端和ut端与控制单向阀的一端连接,所述控制单向阀的另一端连接平衡油路,控制节流阀与控制单向阀并联设置,平衡第一先导式溢流阀与控制三位五通电磁换向阀的tb端连接,所述控制三位五通电磁换向阀的tt端与油箱连接,控制三位四通电磁换向阀的ub端与控制三位五通电磁换向阀的tt端连接,所述控制三位五通电磁换向阀还与变量控制油路连接。
11.变量控制油路与控制三位五通电磁换向阀的tp端、控制三位五通电磁换向阀的tb端、控制三位五通电磁换向阀的控制端和粉松马达油路连接。
12.电控系统包括电源模块、继电器控制模块、行走控制器、第一发动机控制器、第二发动机控制器、启动安全模块、gps模块、第一控制模块和第二控制模块;电源模块分别连接继电器控制模块和第二发动机控制器,继电器控制模块连接第一发动机控制器,第一发动机控制器的另一端连接行走控制器,驾驶室控制模块和第一控制模块分别连接行走控制器;启动安全模块连接在继电器控制模块与第一发动机控制器之间;行走控制器与继电器控制模块连接;第二控制模块和gps模块分别与继电器控制模块连接。
13.第一控制模块包括粉松装置调节模块、粉松装置正反转控制模块、制动阀、高低速阀、行走模块、燃油液位开关、驻车制动开关、高低速开关、压力控制系统、粉松转速编码器、粉松手柄和手油门;粉松装置调节模块连接一端连接行走控制器,另一端接地;粉松装置正反转控制模块一端连接行走控制器,另一端接地;制动阀一端连接行走控制器,另一端接地;高低速阀一端连接行走控制器,另一端接地;行走模块一端连接行走控制器,另一端接地;燃油液位开关的信号输出端连接行走控制器,燃油液位开关的电源端连接继电器;驻车制动的信号输出端连接行走控制器,驻车制动的电源口连接继电器,高低速开关的电源口连接继电器,高低速开关的高速信号输入口和低速信号输出口分别连接行走控制器;压力控制系统的一端连接继电器,另一端接地,压力控制系统的信号输出端连接行走控制器;粉
松转速编码器的电源端连接行走控制器的弱电源接口,粉松转速编码器的信号输出口连接行走控制器;粉松手柄的一端连接继电器,粉松手柄的另一端接地,粉松手柄的信号输出端连接行走控制器;手油门的电源端连接的弱电源接口,手油门的信号输出端连接行走控制器。
14.以上液压系统,通过统一的驱动模块对执行模块进行驱动,使得每个执行元件的油路之间不会相互影响,由此提高工作的效率,在工作时,液压油在驱动模块和执行模块之间循环流动,当需要将油路流向变换时,控制双向变量泵时流经驱动模块的液压油反向流动,从而即可控制整个油路的换向,操作简单。
15.以上电控系统,通过粉松装置调节模块对粉松装置的位置进行控制调节,可以准确的控制深耕粉碎松土机更好地进行松土作业,操控更加灵活,松土效果好;还可以通过粉松装置正反转控制模块和粉松手柄的配合,对粉松装置上的各粉松刀具的正反转进行控制。还可以通过行走模块和手油门的配合,对深耕粉碎松土机前后移动装置单独进行前进动作或后退动作的单独控制;另外,驾驶员可实时获取得到粉松压力、装置压力、前进压力和后退压力的信息,使得驾驶员能够更好的控制深耕粉碎松土机进行松土作业。
附图说明
16.图1为本实用新型中液压系统的示意图。
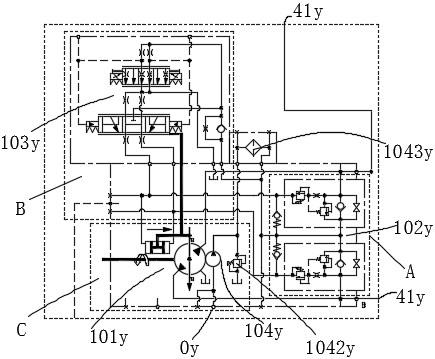
17.图2为本实用新型中液压系统的执行驱动模块的示意图。
18.图3为图2中a处的放大图。
19.图4为图2中b处的放大图。
20.图5为图2中c处的放大图。
21.图6为本实用新型中液压系统的油缸液压泵油路的示意图。
22.图7为本实用新型中液压系统的举升油缸油路和转角油缸油路的示意图。
23.图8为图7中d处的放大图。
24.图9为图6中e处的放大图。
25.图10为本实用新型中液压系统的粉松马达油路的示意图。
26.图11为本实用新型中液压系统的移动执行模块的示意图。
27.图12为图11中f处的放大图。
28.图13为图6中g处的放大图。
29.图14为本实用新型中电控系统的连接关系示意图。
30.图15为本实用新型中电控系统的行走控制器与第一控制模块的连接关系示意图。
31.图16为本实用新型中电控系统的继电器模块与各模块的连接关系示意图。
32.图17为本实用新型中电控系统的第二负载电阻与信号模块的连接关系示意图。
33.图18为本实用新型中电控系统的行走模块连接关系示意图。
34.图19为本实用新型中电控系统的压力控制系统的连接关系示意图。
35.图20为本实用新型的框图。
具体实施方式
36.下面结合附图和具体实施方式对本实用新型做进一步详细说明。
37.如图1-20所示;一种浮动式深耕粉碎松土机包括液压系统和电控系统;液压系统包括驱动模块1y和执行模块2y,所述驱动模块1y包括一个以上的执行驱动模块10y,所述执行驱动模块10y连接油箱0y,所述执行模块2y包括粉碎松土执行模块4y和移动执行模块22y,所述粉碎松土执行模块4y包括粉松马达油路41y、举升油缸油路42y、转角油缸油路43y和转向油缸油路44y,所述举升油缸油路42y、转角油缸油路43y和转向油缸油路44y通过油缸液压泵油路45y连接油箱0y。
38.如图2所示,所述执行驱动模块10y包括变量控制油路101y、平衡油路102y、控制阀油路103y和执行液压泵油路104y,所述执行液压泵油路104y连接油箱0y,执行液压泵油路104y还与平衡油路102y连接,所述平衡油路102y连接控制阀油路103y,所述控制阀油路103y还与变量控制油路101y连接,所述变量控制油路101y与粉松马达油路41y连接。
39.如图2和图5所示,所述执行液压泵油路104y包括执行液压泵1041y、执行溢流阀1042y和过滤器1043y,所述执行液压泵1041y的一端连接油箱0y,执行液压泵1041y的另一端连接过滤器1043y的一端,位于执行液压泵1041y与过滤器1043y之间设置有执行溢流阀1042y,所述执行溢流阀1042y连接油箱0y,过滤器1043y的另一端与平衡油路102y连接,由此,执行液压泵抽出流向其他油路的液压油会先通过过滤器进行过滤,将液压油中的杂质过滤。
40.如图3所示,所述平衡油路102y包括平衡第一弹簧式单向阀1021y、平衡第二弹簧式单向阀1022y、平衡第一先导式溢流阀1023y、平衡第二先导式溢流阀1024y、平衡第一溢流阀1025y、平衡第二溢流阀1026y、平衡第一单向阀1027y、平衡第二单向阀1028y、第一截止阀1029y和第二截止阀1020y,所述过滤器1043y的另一端连接平衡第一弹簧式单向阀1021y和平衡第二弹簧式单向阀1022y的一端,所述平衡第一弹簧式单向阀1021y的另一端连接平衡第一先导式溢流阀1023y的一端,所述平衡第一先导式溢流阀1023y的另一端连接平衡第一溢流阀1025y的一端,所述平衡第一溢流阀1025y的另一端连接平衡第一单向阀1027y的一端,所述平衡第一单向阀1027y的另一端与平衡第一溢流阀1025y的一端连接,第一截止阀1029y与平衡第一单向阀1027y并联设置,所述平衡第二弹簧式单向阀1022y的另一端连接平衡第二先导式溢流阀1024y的一端,所述平衡第二先导式溢流阀1024y的另一端连接平衡第二溢流阀1026y的一端,所述平衡第二溢流阀1026y的另一端连接平衡第二单向阀1028y的一端,所述平衡第二单向阀1028y的另一端与平衡第二溢流阀1026y的一端连接,第二截止阀1020y与平衡第二单向阀1028y并联设置,所述平衡第一先导式溢流阀1023y和平衡第二先导式溢流阀1024y与控制阀油路103y连接,通过平衡油路的作用使得流向控制阀油路的液压油油压稳定。
41.如图4所示,所述控制阀油路103y包括控制三位五通电磁换向阀1031y、控制三位四通电磁换向阀1032y、控制单向阀1033y和控制节流阀1034y,平衡第二先导式溢流阀1024y与控制三位五通电磁换向阀1031y的tp端连接,所述控制三位五通电磁换向阀1031y的ta端与控制三位四通电磁换向阀1032y的up端连接,所述控制三位四通电磁换向阀1032y的ua端和ut端与控制单向阀1033y的一端连接,所述控制单向阀1033y的另一端连接平衡油路102y,控制节流阀1034y与控制单向阀1033y并联设置,平衡第一先导式溢流阀1023y与控制三位五通电磁换向阀1031y的tb端连接,所述控制三位五通电磁换向阀1031y的tt端与油箱0y连接,控制三位四通电磁换向阀1032y的ub端与控制三位五通电磁换向阀1031y的tt端
连接,所述控制三位五通电磁换向阀1031y还与变量控制油路101y连接。
42.如图5所示,所述变量控制油路101y包括双向变量泵1011y和变量活塞缸1012y,控制三位五通电磁换向阀1031y的tp端连接变量活塞缸1012y的一端,控制三位五通电磁换向阀1031y的tb端连接变量活塞缸1012y的另一端,所述变量活塞缸1012y的控制端10121y连接双向变量泵1011y的控制端10111y,所述双向变量泵1011y连接粉松马达油路41y,控制三位五通电磁换向阀1031y的控制端10311y还与变量活塞缸1012y的控制端10121y连接,由此设置,当需要对双向变量泵进行换向时,将控制三位五通电磁换向阀的tp端与tt端连通,且ta端与tb端连通,从而使得通过平衡第二先导式溢流阀流向变量活塞缸一端的液压油流回油箱,液压油通过平衡第一先导式溢流阀流向变量活塞缸另一端,由此驱动变量活塞缸对双向变量泵进行控制换向。
43.如图6所示,所述油缸液压泵油路45y包括油缸液压泵451y、二位三通换向阀452y和油缸液压泵溢流阀453y,所述油缸液压泵451y的一端连接油箱0y,二位三通换向阀452y的pf端连接油缸液压泵451y的另一端,二位三通换向阀452y的cf端连接举升油缸油路42y和转角油缸油路43y,二位三通换向阀452y的ef端连接转向油缸油路44y,所述二位三通换向阀452y的控制端4521y通过油缸液压泵溢流阀453y连接油箱0y,由此设置,当需要对举升油缸和转角油缸进行控制时,控制二位三通换向阀将其cf端和ef端与pf端联动,从而使得液压油可以流向举升油缸、转角油缸和转向油缸,当不需要液压油流向转向油缸时,控制二位三通换向阀将cf端和pf端连通即可。
44.如图7和图8,所述举升油缸油路42y包括举升三位五通电磁阀421y、举升单向阀422y、举升第一液控单向阀423y、举升第二液控单向阀424y和举升油缸425y,二位三通换向阀452y的cf端连接举升三位五通电磁阀421y的e1p端,在二位三通换向阀452y的cf端与举升三位五通电磁阀421y的e1p端之间设置有举升单向阀422y,举升三位五通电磁阀421y的e1a端连接举升第一液控单向阀423y的一端,所述举升第一液控单向阀423y的另一端连接举升油缸425y的一端;举升三位五通电磁阀421y的e1b端连接举升第二液控单向阀424y的一端,所述举升第二液控单向阀424y的另一端连接举升油缸425y的另一端,举升三位五通电磁阀421y的e1t端连接油箱0y,当需要驱动举升油缸时,控制举升三位五通电磁阀将其e1p端连通e1a端,举升三位五通电磁阀的e1b端连通e1t端,由此,液压油即可流向举升油缸,举升油缸向一端驱动;当需要举升油缸向另一端驱动时,控制举升三位五通电磁阀将其e1p端连通e1b端,举升三位五通电磁阀的e1a端连通e1t端,由此即可使得举升油缸向另一端驱动。
45.如图7和图8,所述转角油缸油路43y包括转角三位五通电磁阀431y、转角单向阀432y、转角第一液控单向阀433y、转角第二液控单向阀434y和举升油缸435y,二位三通换向阀452y的cf端连接转角三位五通电磁阀431y的e2p端,在二位三通换向阀452y的cf端与转角三位五通电磁阀431y的e2p端之间设置有举升单向阀432y,转角三位五通电磁阀431y的e2a端连接转角第一液控单向阀433y的一端,所述转角第一液控单向阀433y的另一端连接转角油缸435y的一端;转角三位五通电磁阀431y的e2b端连接转角第二液控单向阀434y的一端,所述转角第二液控单向阀434y的另一端连接转角油缸435y的另一端,转角三位五通电磁阀431y的e1t端连接油箱0y,当需要驱动转角油缸时,控制转角三位五通电磁阀将其e2p端连通e2a端,转角三位五通电磁阀的e2b端连通e2t端,由此,液压油即可流向转角油
缸,转角油缸向一端驱动;当需要转角油缸向另一端驱动时,控制转角三位五通电磁阀将其e2p端连通e2b端,转角三位五通电磁阀的e2a端连通e2t端,由此即可使得转角油缸向另一端驱动。
46.如图8所示,在油缸液压泵油路45y与转角油缸油路43y和举升油缸油路42y之间还设有举升转角控制油路46y,所述举升转角控制油路46y包括举升转角控制第一溢流阀461y、举升转角过滤器462y、举升转角第二溢流阀463y、举升转角第三溢流阀464y和举升转角第四溢流阀465y,二位三通换向阀452y的cf端连接举升转角过滤器462y的一端,所述举升转角过滤器462y的另一端连接举升转角第一溢流阀461y的一端,举升转角第一溢流阀461y的另一端连接油箱0y,二位三通换向阀452y的cf端还与举升转角第二溢流阀463y的一端连接,所述举升转角第二溢流阀463y的另一端连接举升三位五通电磁阀421y的控制端4211y和转角三位五通电磁阀431y的控制端4311y,位于二位三通换向阀452y的cf端与举升转角第二溢流阀463y的一端之间连接有举升转角第三溢流阀464y的一端,所述举升转角第三溢流阀464y的另一端与油箱0y连接;位于举升转角第二溢流阀463y与举升三位五通电磁阀421y的控制端4211y和转角三位五通电磁阀431y的控制端4311y之间连接有举升转角第四溢流阀465y的一端,所述举升转角第四溢流阀465y的另一端与油箱0y连接,由此设置,通过举升转角控制油路对举升三位五通电磁阀和转角三位五通电磁阀进行控制。
47.如图6、7和图9所示,所述转向油缸油路44y包括循环油路441y、转向油缸442y、转向泄油溢流阀443y和转向进油单向阀444y,所述二位三通换向阀452y的ef端连接转向进油单向阀444y的一端,转向进油单向阀444y的另一端连接循环油路441y,所述转向进油单向阀444y的一端还与转向泄油溢流阀443y的一端连接,所述转向泄油溢流阀443y的另一端连接循环油路441y,循环油路441y与转向油缸442y连接;所述转向油缸442y设有第一转向油缸4421y和第二转向油缸4422y,所述循环油路441y包括转向调节阀445y和稳流油路446y,所述转向调节阀445y的op端连接转向进油单向阀444y的另一端,转向调节阀445y的ot端连接转向泄油溢流阀443y的另一端并与油箱0y连接,转向调节阀445y的or端连接第一转向油缸4421y的一端与第二转向油缸4422y的另一端,转向调节阀445y的ol端连接第二转向油缸4422y的一端和第一转向油缸4421y的另一端(在图7中示出);在转向调节阀445y的or端与ol端之间设有稳流油路446y,由此,当需要驱动转向油缸转向左边时,控制转向调节阀将其op端连通ol端,此时,液压油从转向调节阀的ol端流向第二转向油缸的一端和第一转向油缸的另一端,由此实现转向左边;当需要驱动转向油缸转向有边时,控制转向调节阀将其op端连通or端,此时,液压油从转向调节阀的or端流向第一转向油缸的一端和第二转向油缸的另一端,由此实现转向右边。
48.如图9所示,所述稳流油路441y包括转向第一溢流阀4411y、转向第二溢流阀4412y、转向第一单向阀4413y和转向第二单向阀4414y,所述转向第一溢流阀4411y的一端连接转向调节阀445y的or端,转向第一溢流阀4411y的另一端连接转向第二溢流阀4412y的一端,所述转向第二溢流阀4412y的另一端连接转向调节阀445y的ol端,所述转向第一溢流阀4411y的另一端和转向第二溢流阀4412y的一端还与油箱0y连接,所述转向第一单向阀4413y一端与转向调节阀445y的or端连接,转向第一单向阀4413y的另一端与转向第二单向阀4414y的一端连接,所述转向第二单向阀4414y的另一端与转向调节阀445y的ol端连接,转向第一单向阀4413y与转向第二单向阀4414y之间还与油箱0y连接,由此设置,通过稳流
油路使得通往转向油缸的液压油不会出现较大的波动,使得油路稳定。
49.如图10所示,所述粉松马达油路41y包括粉松马达411y和马达泄油油路412y,双向变量泵101y的一端连接粉松马达411y的一端,所述粉松马达411y的另一端与双向变量泵101y的另一端连接,位于粉松马达411y与双向变量泵101y之间设有马达泄油油路412y,所述马达泄油油路412y包括马达泄油三位二通换向阀413y和马达泄油溢流阀414y,所述马达泄油三位二通换向阀413y的ma端连接粉松马达411y的一端,马达泄油三位二通换向阀413y的mb端连接粉松马达411y的另一端,所述马达泄油三位二通换向阀413y的mt端连接马达泄油溢流阀414y的一端,马达泄油溢流阀414y的另一端连接油箱0y,由此设置,当粉松马达停止工作时,存留在粉松马达的液压油通过马达泄油油路回流到油箱。
50.如图11和图12所示,执行驱动模块10y还与移动执行模块22y连接,所述移动执行模块22y包括刹车马达221y、刹车控制阀222y和刹车二位二通换向阀223y,双向变量泵101y的一端连接刹车马达221y的一端,所述刹车马达221y的另一端连接双向变量泵101y的另一端,在所述刹车马达221y上还设有刹车控制阀222y,所述刹车控制阀222y连接刹车二位二通换向阀223y的sa端,所述刹车二位二通换向阀223y的sp端连接执行驱动模块10y,刹车二位二通换向阀223y的st端连接油箱0y,由此,当需要进行刹车时,控制刹车二位二通换向阀的sp端连通sa端,由此液压油即可流向刹车控制阀,从而实现刹车,停止刹车时,控制刹车二位二通换向阀的sa端连通st端,由此液压油即可流回油箱。
51.如图6和图13所示,油缸液压泵451y与油箱0y连接的一端连接有风扇马达油路47y,所述风扇马达油路47y包括风扇马达液压泵471y、风扇马达472y和风扇马达溢流阀473y,所述风扇马达液压泵471y的一端连接油箱0y,风扇马达液压泵471y的另一端连接风扇马达472y的一端,所述风扇马达472y的另一端连接油箱0y,在风扇马达472y的两端之间设有风扇马达溢流阀473y,所述风扇马达溢流阀473y的一端连接风扇马达472y与风扇马达液压泵471y连接的一端,风扇马达溢流阀473y的另一端连接风扇马达472y与油箱0y连接的一端,由此设置,通过风扇马达油路的作用实现散热。
52.上述的液压系统,通过统一的驱动模块对执行模块进行驱动,使得每个执行元件的油路之间不会相互影响,由此提高工作的效率,在工作时,液压油在驱动模块和执行模块之间循环流动,当需要将油路流向变换时,控制双向变量泵时流经驱动模块的液压油反向流动,从而即可控制整个油路的换向,操作简单。
53.所述深耕粉碎松土机包括粉松装置,粉松装置用于插入到土壤内进行松土。电控系统包括电源模块1、继电器控制模块2、行走控制器、第一发动机控制器、第二发动机控制器、启动安全模块3、gps模块、第一控制模块和第二控制模块4;电源模块1分别连接继电器控制模块2和第二发动机控制器,继电器控制模块2连接第一发动机控制器,第一发动机控制器的另一端连接行走控制器,工作信号控制模块和第一控制模块分别连接行走控制器;启动安全模块3连接在继电器控制模块2与第一发动机控制器之间;行走控制器与继电器控制模块2连接;第二控制模块4和gps模块分别与继电器控制模块2连接。
54.电源模块1包括启动电机、蓄电池和发电机,启动电机一端与第二发电机控制器连接,启动电机的另一端与蓄电池连接,发电机的电力输出端分别与蓄电池和继电器控制模块2连接;发电机为柴油机。
55.启动安全模块包括急停开关和钥匙开关,急停开关与钥匙开关串联连接,钥匙开
关一端与第一负载电阻连接,钥匙开关的另一端设有第一输出口和第二输出口,钥匙开关为双闸刀开关,钥匙开关分别李拦截第一输出口与第二输出口,第一接口与急停开关连接,急停开关的另一端与主继电器控制电路的一端连接,第二接口与第一发动机控制器连接。
56.继电器控制模块2包括主继电器、第一负载电阻、第二负载电阻、钥匙联动开关和t15继电器,主继电器的控制电路一端与急停开关的一端连接,主继电器的控制电路的另一端接地;主继电器的工作电路一端与第一负载电阻和发动机的电力输出端连接,第一负载电阻另一端分别与启动安全模块和第一发动机控制器连接,主继电器的工作电路的另一端与第二负载电阻连接,第二控制模块与第二负载电阻的另一端连接;t15继电器控制电路的一端连接启动安全模块,t15继电器控制电路的另一端接地;t15继电器的工作电路一端连接第一发动机控制器,t15继电器工作电路的另一端连接第二负载电阻;行走控制器与第二负载电阻连接;发动机的一端还连接有充电指示灯,发动机启动时,充电指示灯亮,提示为蓄电池充电。
57.gps模块的一端连接第一负载电阻,gps模块的另一端连接第二负载电阻;gps模块接地,gps模块信号输出端与行走控制器连接。
58.以上设置,当启动深耕粉碎松土机时,转动钥匙开关,钥匙开关的第一输出口与急停开关联通后,蓄电池分别向启动电机和第一负载电阻输出信号,电流通过第一负载电阻分别向第一发动机控制器和启动安全模块发出信号,输出电信号流向钥匙开关和急停开关,电信号从急停开关向主控制器控制电路的一端输出信号,主继电器控制电路得电后使得主继电器的工作电路导通,主继电器的工作电路通过第二负载电路向第一控制模块、第二控制模块和gps模块输出信号,完成点火动作,发动机持续为蓄电池充电,蓄电池的输出端通过主继电器的工作电路向第二负载电阻输出信号,通过第二负载电阻为行走控制器、第一发动机控制器、第一控制模块、第二控制模块和驾驶室控制模块提供电源。
59.通过粉松装置调节模块,可以对粉松装置的位置进行控制调节,还可以通过粉松装置正反转控制模块和粉松手柄的配合,对粉松装置上的各粉松刀具的正反转进行控制;还可以通过行走模块和手油门的配合,对深耕粉碎松土机前后移动装置单独进行前进动作或后退动作的单独控制,这样,可以准确的控制深耕粉碎松土机更好地进行松土作业,操控更加灵活,松土效果好;同时,gps模块实时对深耕粉碎松土机输出信号,为驾驶员提供作业路线的参考。
60.第一发动机控制器连接有发动机控制器诊断接口,由第二负载电阻提供电源,发动机控制器对第一发动机控制器诊断后向行走控制器输出信号,驾驶员可直观得到发动机及第一发动机控制器当前情况。
61.第一控制模块包括粉松装置调节模块、粉松装置正反转控制模块、制动阀、高低速阀、行走模块、燃油液位开关、驻车制动开关、高低速开关、压力控制系统、粉松转速编码器、粉松手柄和手油门;粉松装置调节模块一端连接行走控制器,另一端接地;粉松装置正反转控制模块一端连接行走控制器,另一端接地;制动阀一端连接行走控制器,另一端接地;高低速阀一端连接行走控制器,另一端接地;行走模块一端连接行走控制器,另一端接地;燃油液位开关的信号输出端连接行走控制器,燃油液位开关的电源端连接第二负载电阻;驻车制动的信号输出端连接行走控制器,驻车制动的电源口连接第二负载电阻,高低速开关的电源口连接第二负载电阻,高低速开关的高速信号输入口和低速信号输出口分别连接行
走控制器;压力控制系统的一端连接第二负载电阻,另一端接地,压力控制系统的信号输出端连接行走控制器;粉松转速编码器的电源端连接行走控制器的弱电源接口,粉松转速编码器的信号输出口连接行走控制器;粉松手柄的一端连接第二负载电阻,粉松手柄的另一端接地,粉松手柄的信号输出端连接行走控制器;手油门的电源端连接的弱电源接口,手油门的信号输出端连接行走控制器。
62.以上设置,通过粉松装置调节模块,可以对粉松装置的位置高低、前后进行控制,还可以通过粉松装置正反转控制模块和粉松手柄的配合,对粉松装置上的各粉松刀具的正反转进行控制;还可以通过行走模块和手油门的配合,对深耕粉碎松土机前后移动装置进行前进动作或后退动作的控制,操控更加灵活,松土效果好;同时,燃油液位开关和粉松转速编码器可为驾驶员提供深耕粉碎松土机工作状态的参考;调节高低速开关时,高低速开关向行走控制器输出信号,行走控制器处理后向高低速阀输出相应的输出信号;调节驻车制动关时,驻车制动开关向行走控制器输出信号,行走控制器处理后向制动阀输出相应的输出信号;压力控制系统由第二负载电阻提供电源,将信号输出到行走控制器,这样,通过行走控制器可以得到液压油温、粉松压力、装置压力、前进压力、后退压力等重要参数,便于安全、规范地工作。
63.所述第二发动机控制器还分别连接有预热继电器和燃油含水传感器,第二发动机控制器与启动电机连接,燃油含水传感器的信号输出端连接第二发动机控制器;这样,第二发动机控制器连接预热继电器和燃油含水传感器,可通过第二发动机控制器对进气进行加热,同时通过第二发动机控制器检测燃油含水量,若燃油系统中存在水,可能导致点火失败甚至动力损伤的情况。
64.所述第二控制模块包括电子油泵、显示仪表和信号模块,电子油泵的一端连接第二负载电阻,电子油泵的另一端接地;显示仪表的一端连接第二负载电阻,显示仪表的另一端接地,显示仪表的输出信号端连接行走控制器;信号模块的一端连接第二负载电阻,信号模块的另一端连接地线;第二负载电阻向第二控制模块提供电源,电子油泵持续为发动机提供燃油;显示仪表的信号输出端将信号输出到行走控制器,为驾驶员提供信息。
65.信号模块包括前灯组、前灯开关、驾驶室灯组、驾驶室灯开关、旋闪灯组、旋闪灯开关、喇叭和喇叭开关,前灯组的一端连接前灯开关,前灯组的另一端接地,前灯开关的另一端连接第二负载电阻;驾驶室灯组一端连接驾驶室灯开关,驾驶室灯组另一端接地,驾驶室灯开关的另一端连接第二负载电阻;旋闪灯组一端连接旋闪灯开关,旋闪灯组另一端接地,旋闪灯开关另一端连接第二负载电阻;喇叭的一端连接喇叭开关,喇叭的另一端接地,喇叭开关的另一端连接第二负载电阻;第二负载电阻为信号模块提供电源,驾驶员可在驾驶室对前灯、驾驶室灯组和旋闪灯进行控制,简单方便。
66.所述前灯组包括左前灯和右前灯,左前灯和右前灯的一端并联连接前灯开关,左前灯和右前灯的另一端并联接地。
67.所述驾驶室灯组包括左前工作灯、右前工作灯、左后工作灯、右后工作灯和顶灯,所述左前工作灯的一端连接驾驶室灯开关,左前工作灯的另一端接地;所述右前工作灯的一端连接驾驶室灯开关,右前工作灯的另一端接地;所述左后工作灯的一端连接驾驶室灯开关,左后工作灯的另一端接地;所述右后工作灯的一端连接驾驶室灯开关,右后工作灯的另一端接地。
68.旋闪灯组包括左后旋闪灯和右后旋闪灯,左后旋闪灯和右后旋闪灯的一端并联连接旋闪灯开关,左后旋闪灯和右后旋闪灯的另一端并联接地。
69.所述电控系统还包括驾驶室控制模块,所述驾驶室控制模块包括雨刷、雨刷开关、水泵电机、水泵开关、风扇电机,雨刷电机的一端连接第二负载电阻,雨刷电机的另一端接地,雨刷的两端分别连接雨刷电机的复位信号端、低速信号端和高速信号端;水泵开关一端连接第二负载电阻,水泵开关的另一端连接水泵电机,水泵电机的另一端接地;风扇电机的一端连接第二负载电阻,风扇电机的另一端接地;第二负载电阻为驾驶室模块提供电源,驾驶员可在驾驶室对雨刷、水泵和风扇进行控制,简单方便。
70.所述压力控制系统包括液压油温传感器、粉松压力传感器、装置压力传感器、前进压力传感器和后退压力传感器,液压油温传感器、粉松压力传感器、装置压力传感器、前进压力传感器和后退压力传感器的输入端并联连接第二负载电阻,液压油温传感器、粉松压力传感器、装置压力传感器、前进压力传感器和后退压力传感器的另一端并联接地,液压油温传感器、粉松压力传感器、装置压力传感器、前进压力传感器和后退压力传感器的信号输出端分别连接行走控制。
71.以上设置,第二负载电阻分别向粉松压力传感器、装置压力传感器、前进压力传感器和后退压力传感器提供电源,粉松压力传感器、装置压力传感器、前进压力传感器和后退压力传感器将传感信号输出到行走控制器,这样,驾驶员可在行走控制器得到粉松压力、装置压力、前进压力和后退压力的信息,便于深耕粉碎松土机的松土作业;液压油温传感器将液压油温信号输出到行走控制器,驾驶员可从行走控制器得到液压油温的信息。
72.所述行走模块包括前行走泵正转电磁阀、前行走泵反转电磁阀、后行走泵正转电磁阀和后行走泵反转电磁阀,前行走泵正转电磁阀、前行走泵反转电磁阀、后行走泵正转电磁阀和后行走泵反转电磁阀的一端分别连接行走控制器,前行走泵正转电磁阀、前行走泵反转电磁阀、后行走泵正转电磁阀和后行走泵反转电磁阀的另一端接地;这样,可对深耕粉碎松土机前后移动装置单独进行前进动作或后退动作的单独控制,可以准确的控制深耕粉碎松土机更好地进行松土作业,操控更加灵活,松土效果好。
73.所述深耕粉碎松土机的电控系统的工作方法,包括以下步骤:
74.s1、当启动深耕粉碎松土机时,转动钥匙开关,钥匙开关的第一输出口与急停开关连通后,蓄电池分别向启动电机和第一负载电阻输出信号,电流通过第一负载电阻分别向第一发动机控制器和启动安全模块发出信号,输出电信号流向钥匙开关和急停开关,电信号从急停开关向主控制器控制电路的一端输出信号;
75.s2、当需要对粉松装置的位置进行控制调节时,通过粉松装置调节模块对粉松装置的位置进行控制调节;
76.s3、当粉松装置调节至目标位置后,通过粉松装置正反转控制模块和粉松手柄的配合,对粉松装置上的各粉松刀具的正反转进行控制;
77.s4、当需要驱动深耕粉碎松土机移动时,通过行走模块和手油门的配合,对深耕粉碎松土机前后移动装置进行前进动作或后退动作的控制;
78.s5、通过粉松压力传感器、装置压力传感器、前进压力传感器和后退压力传感器来获取粉松压力、装置压力、前进压力和后退压力的参数。
79.上述方法,通过粉松装置调节模块对粉松装置的位置进行控制调节,可以准确的
控制深耕粉碎松土机更好地进行松土作业,操控更加灵活,松土效果好;还可以通过粉松装置正反转控制模块和粉松手柄的配合,对粉松装置上的各粉松刀具的正反转进行控制;还可以通过行走模块和手油门的配合,对深耕粉碎松土机前后移动装置单独进行前进动作或后退动作的单独控制;另外,驾驶员可实时获取得到粉松压力、装置压力、前进压力和后退压力的信息,使得驾驶员能够更好的控制深耕粉碎松土机进行松土作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1