联合收割机以及行驶路径校正方法与流程
本发明涉及当在中途使进行自动割取行驶的直线行程移动时对相邻的其他直线行程进行校正的联合收割机、以及对联合收割机的行驶路径进行校正的行驶路径校正方法。
背景技术:
1、以往,一边在田地行驶一边进行谷秆的割取的联合收割机能够基于利用gps等卫星定位系统获取的本装置的位置信息并按照预先设定的行驶路径进行自动割取行驶。
2、当对进行自动割取行驶的多个直线行程进行组合而创建行驶路径时,联合收割机即便按照预先设定的行驶路径的直线行程进行自动割取行驶,未收割谷秆的垄列有时也相对于直线行程而偏移。因而,关于联合收割机,在直线行程的自动割取行驶的过程中,作业者有时通过手动操作而对行进路线进行调整。例如,联合收割机在自动割取行驶的中途使作业中的直线行程平行移动(所谓的路径偏移),并继续进行移动后的直线行程的自动割取行驶。
3、例如,关于专利文献1所公开的行驶作业机,行驶机体在一边进行作业、一边在以直行状进行自动转向操纵行驶的直行状行驶路径、以及不进行作业而为了相对于直行状行驶路径的行驶终端部转换方向进行人为转向操纵行驶的方向转换路径上反复行驶。行驶作业机的目标行驶路径调整部在自动转向操纵行驶的中途将基于人为操作输入而相对于原来的目标行驶路径平行移动后的目标行驶路径设定为:使得行驶机体的行进路线不平行移动而此后应该行驶的目标行驶路径。另外,目标行驶路径调整部基于目标行驶路径区间的调整量而对基于人为操作输入而调整的目标行驶路径区间以后的目标行驶路径进行自动调整。
4、现有技术文献
5、专利文献
6、专利文献1:日本特许第6415880号
技术实现思路
1、关于现有的联合收割机,在自动割取行驶的中途使直线行程平行移动,并继续进行移动后的直线行程的自动割取行驶,但是,并未具体地对该直线行程的后续的其他直线行程进行修正,在每次以直线行程进行作业时都需要进行平行移动等修正处理。因而,作业者在每次以直线行程进行作业时都需要进行修正处理的判断、操作,从而产生作业者花费工时的问题。
2、专利文献1虽然记载有对基于人为操作输入而调整的目标行驶路径区间以后的目标行驶路径进行调整的内容,但是,并未记载处于什么目的如何调整。例如,当在自动割取行驶的中途使联合收割机的直线行程平行移动时,即便继续进行后续的直线行程的自动割取行驶,也会产生残留有未割取的谷秆的问题。然而,在现有技术、专利文献1所记载的技术中,无法消除这样的问题。
3、本发明的目的在于提供一种联合收割机以及行驶路径校正方法,当在中途使进行自动割取行驶的直线行程移动时能够适当地对相邻的其他直线行程进行校正。
4、为了解决上述课题,本发明的联合收割机按照行驶路径而进行自动割取行驶,其特征在于,所述联合收割机具备:行驶路径创建部,其在田地的未收割区域创建至少具有第一直线行程、以及与所述第一直线行程平行且相邻的第二直线行程的所述行驶路径;自动驾驶控制部,其按照所述行驶路径而对自动行驶及自动割取进行控制;行程移动部,其在所述第一直线行程的所述自动割取行驶的执行过程中使所述第一直线行程向与行进方向交叉的方向移动而对所述行驶路径进行校正;以及行程校正部,其在所述第一直线行程向一个方向移动的情况下将所述第二直线行程的至少一部分校正为向所述一个方向倾斜。
5、关于上述本发明的联合收割机,可以构成为:在通过所述第一直线行程的移动而使得所述第一直线行程的终点向一个方向移动的情况下,所述行程校正部将所述第二直线行程校正为向所述一个方向倾斜。
6、关于上述本发明的联合收割机,可以构成为:还具备校正选择部,在进行了所述第一直线行程的所述平行移动的情况下,该校正选择部选择是否校正所述第二直线行程,在利用所述校正选择部选择了进行校正的情况下,所述行程校正部进行所述第二直线行程的校正。
7、关于上述本发明的联合收割机,可以构成为:当使得将所述第一直线行程的起点及终点连结的直线在所述第一直线行程的移动前后以规定角度以上的角度倾斜时,所述校正选择部能够进行所述第二直线行程的校正的选择。
8、关于上述本发明的联合收割机,可以构成为:还具备对所述行驶路径与所述田地的形状一起进行显示的显示部,所述校正选择部在所述显示部以不同的显示方法对校正前的所述第二直线行程和校正后的所述第二直线行程进行显示、且能够选择任一行程。
9、关于上述本发明的联合收割机,可以构成为:所述校正选择部在所述显示部对校正前的所述第二直线行程以及校正后的所述第二直线行程中的暂时选择的行程的割取宽度进行显示。
10、另外,为了解决上述课题,本发明的行驶路径校正方法对联合收割机进行自动割取行驶的行驶路径进行校正,其特征在于,所述行驶路径校正方法具有:移动工序,在该移动工序中,在田地的未收割区域中至少具有第一直线行程、以及与所述第一直线行程平行且相邻的第二直线行程的所述行驶路径上,在所述第一直线行程的所述自动割取行驶的执行过程中,使所述第一直线行程向与行进方向交叉的方向移动而对所述行驶路径进行修正;以及校正工序,在该校正工序中,在所述第一直线行程向一个方向移动的情况下,将所述第二直线行程的至少一部分校正为向所述一个方向倾斜。
11、关于上述本发明的行驶路径校正方法,可以构成为:在所述校正工序中,在通过所述第一直线行程的移动而使得所述第一直线行程的终点向一个方向移动的情况下,将所述第二直线行程校正为向所述一个方向倾斜。
12、关于上述本发明的行驶路径校正方法,可以构成为:在所述移动工序中,进行所述第一直线行程的平行移动而对所述行驶路径进行修正,还具有选择工序,在该选择工序中,在进行了所述第一直线行程的所述平行移动的情况下,选择是否校正所述第二直线行程,在所述校正工序中,在通过所述选择工序选择了进行校正的情况下,进行所述第二直线行程的校正。
13、关于上述本发明的行驶路径校正方法,可以构成为:在所述选择工序中,当使得将所述第一直线行程的起点及终点连结的直线在所述第一直线行程的移动前后以规定角度以上的角度倾斜时,能够进行所述第二直线行程的校正的选择。
14、关于上述本发明的行驶路径校正方法,可以构成为:在所述选择工序中,在对所述行驶路径与所述田地的形状一起进行显示的所述联合收割机的显示部以不同的显示方法对校正前的所述第二直线行程和校正后的所述第二直线行程进行显示、且能够选择任一行程。
15、关于上述本发明的行驶路径校正方法,可以构成为:在所述选择工序中,在所述显示部对校正前的所述第二直线行程以及校正后的所述第二直线行程中的暂时选择的行程的割取宽度进行显示。
16、发明效果
17、根据本发明,能够提供一种联合收割机以及行驶路径校正方法,当在中途使进行自动割取行驶的直线行程移动的情况下,能够适当地对相邻的其他直线行程进行校正。
技术特征:
1.一种联合收割机,其按照行驶路径进行自动割取行驶,其特征在于,
2.根据权利要求1所述的联合收割机,其特征在于,
3.根据权利要求2所述的联合收割机,其特征在于,
4.根据权利要求3所述的联合收割机,其特征在于,
5.根据权利要求3或4所述的联合收割机,其特征在于,
6.根据权利要求5所述的联合收割机,其特征在于,
7.一种行驶路径校正方法,对联合收割机进行自动割取行驶的行驶路径进行校正,其特征在于,
8.根据权利要求7所述的行驶路径校正方法,其特征在于,
9.根据权利要求8所述的行驶路径校正方法,其特征在于,
10.根据权利要求9所述的行驶路径校正方法,其特征在于,
11.根据权利要求9或10所述的行驶路径校正方法,其特征在于,
12.根据权利要求11所述的行驶路径校正方法,其特征在于,
技术总结
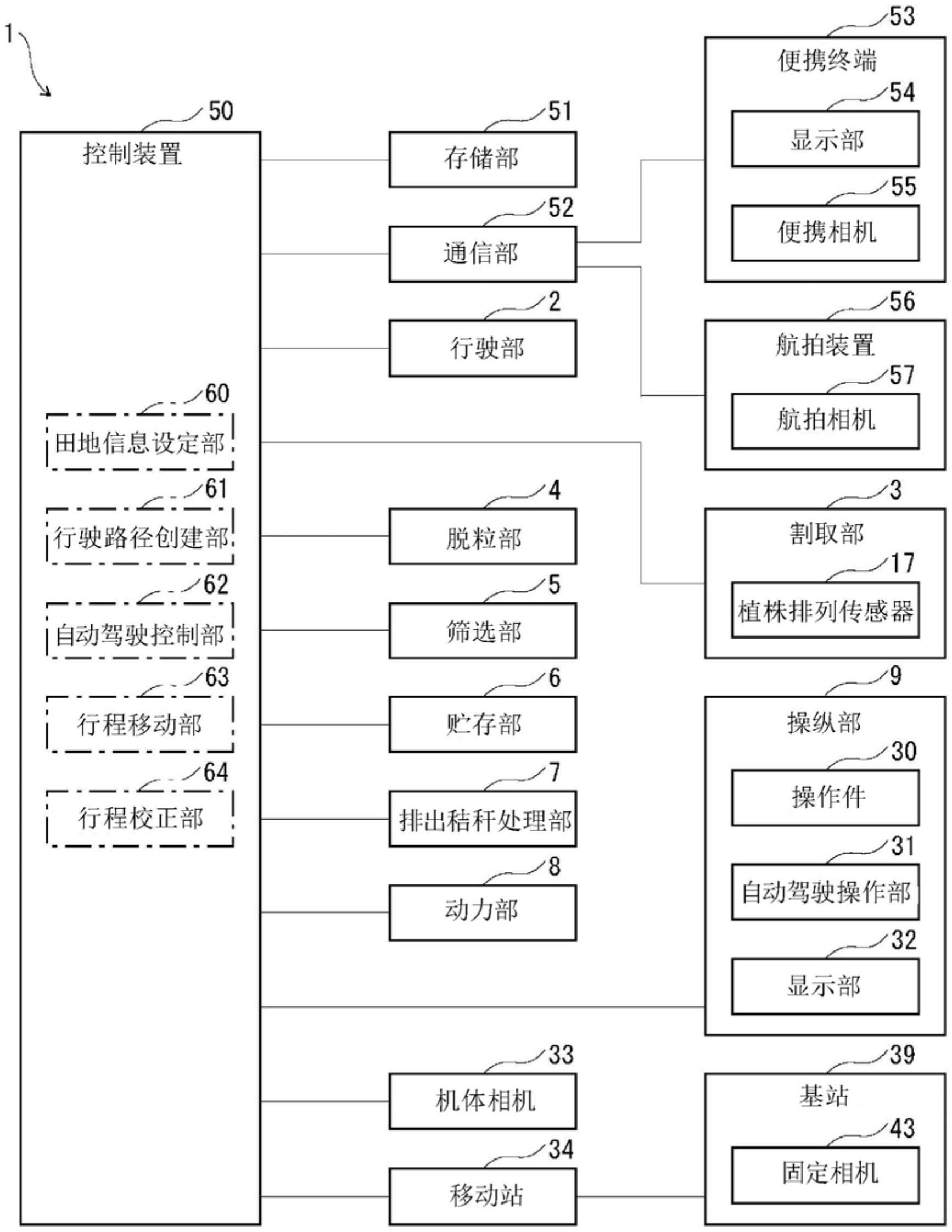
提供一种联合收割机以及行驶路径校正方法,当在中途使进行自动割取行驶的直线行程移动时,能够适当地对相邻的其他直线行程进行校正。联合收割机1具备控制装置50,控制装置50作为行驶路径创建部61、自动驾驶控制部62、行程移动部63、行程校正部64而发挥功能。行驶路径创建部61在田地的未收割区域创建至少具有第一直线行程、以及与第一直线行程平行且相邻的第二直线行程的行驶路径。自动驾驶控制部62按照行驶路径而对自动行驶及自动割取进行控制。行程移动部63在第一直线行程的自动割取行驶的执行过程中使第一直线行程向与行进方向交叉的方向移动而对行驶路径进行修正。行程校正部64在通过第一直线行程的移动而使得第一直线行程向一个方向移动的情况下将第二直线行程的至少一部分校正为向同一个方向倾斜。
技术研发人员:铃木秀崇,山口雄司,西井康人
受保护的技术使用者:洋马控股株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!