用于外部放射疗法的程序的身体组织的可重复对准的系统和方法与流程
本系统和方法涉及分次放射疗法的领域。特别地,其涉及与定位工具组合的机器人臂,该定位工具在治疗过程中相对于电离放射疗法束重复且可再现地进行身体放置。
背景技术:
1、放射疗法是许多患有各种癌症(包括胸部和骨盆区域周围)的患者的标准治疗方法。使用具有旋转电离辐射治疗头的放射疗法装置的治疗技术允许将非常高的剂量聚焦地递送至用于治疗的目标(例如肿瘤、器官),同时以极大准确度使相邻的健康组织幸免。适形放射疗法(其中在电离辐射治疗头旋转时使用多叶准直器动态地改变电离辐射束的形状)允许肿瘤的形状在三维空间中被该束非常接近地跟随。这样的系统由varian、cyberknife、tomotherapy(accuray)、shinva等制造。这些技术提供最大的益处的前提是目标的移动被减少到最低限度。
2、在受试者通过放射疗法装置进行治疗之前,典型地通过ct扫描或较不经常地通过mri来拍摄受试者的治疗区域的三维图像。根据这些图像,确定与电离辐射束的束相交体积(例如等中心)相关的一个或多个位置目标。放射肿瘤学家通常在每个ct和/或mr切片上画出肿瘤区域的形状,以及要保护的健康组织的轮廓,这些健康组织应该接收更少的剂量。他定义了由每个结构不得不接收的剂量。物理学家和放射肿瘤学技术人员使用专用软件以计算是否要通过360°旋转臂递送的辐射的“量”,以及在肿瘤区域周围的辐射等剂量、束形状和治疗头的移动。将来自模拟的数据(包括一个或多个束相交体积的三维位置信息)传送至用于操作放射疗法装置(直线加速器或其他发射电离辐射的装置)的软件。这个阶段被称为“治疗模拟”或“模拟”。
3、位于骨盆区域周围的大多数组织结构(膀胱、肛门、前列腺、直肠、子宫颈、子宫、阴道)并未附于骨盆壁上,并且可能从为了模拟而拍摄治疗区域的医学图像的那一天到通过放射疗法装置递送通过外部放射疗法进行的首次治疗的那一天发生显著移动。
4、躺在台上的受试者通常将具有一个或多个墨水标记、纹身或其他在身体上提供的标记,并且将使用位于侧壁上并沿放射疗法治疗台的轴线投射的一个或多个激光束相对于这些标记进行定位。大多数现代的外部放射疗法机都具有内置的医学成像单元,其可以在用于治疗患者的同一个台上拍摄(例如,进行x射线、低质量ct扫描)受试者的图像。这允许确保组织目标相对于由放射疗法装置发射的电离辐射束的束相交体积的位置的细调等。在使用激光束的这种首次定位之后,通常是通过内置医学成像单元准确可视化的骨骼结构,其用于将受试者精确定位在治疗台上。在治疗台和模拟台上,将总是在一个可再现位置放置受试者。然而,受试者的这种定位并没有考虑到内部结构的位移。
5、为了允许周围的健康组织愈合,放射疗法通常是分次进行的——将总辐射剂量分成在数天、数周或数月的时间内递送的许多个较小剂量。分次外部放射疗法可持续6-7周,通常每周5次,并且受试者的位置在每个疗程时都以毫米精度与电离辐射束精确对准,以聚焦于肿瘤并减少对健康组织的损害。这是通过使用越过受试者身上的墨水标记、纹身标记的投射激光线来将受试者在放射疗法治疗台上准确对准而实现的。然而,即使将受试者准确对准,内部器官的位置也会有变化,主要是因为它们不是直接附接至骨骼结构的。例如,根据我们自身的考察,子宫颈可以在每个方向上移动多达2cm,这需要在原始治疗区周围引入大的体积裕度,增大了被治疗的体积,这导致更高的急性和晚期副作用发生率。两个疗程之间的子宫颈的移动可能是由膀胱和/或直肠的充盈或排空(由于排便和部分地由于呼吸运动)引起的。因此,患者可能被要求在每个放射疗法疗程之前排空她们的直肠并充盈他们的膀胱。这使得子宫移位减少,但没有以可再现方式防止它们。事实上,在整个治疗持续时间(例如28-30个疗程)期间,患者通常不能够将膀胱保持充盈在相同的程度,因为在持续时间接近结束时,膀胱的炎症阻止膀胱完全充盈。此外,排空直肠使前直肠壁和后直肠壁两者在子宫颈周围的具有16-20mm的治疗裕度的高剂量等剂量体积内在一起,这增加了放射疗法的毒性。
6、因此,对于允许可重复固定组织结构以获益于高治疗精度的系统和方法存在需要。
技术实现思路
1、本文提供了一种用于在包括一个或多个外部放射疗法疗程的外部放射疗法程序中辅助受试者治疗的放射疗法系统(100),该系统(100)包括:
2、-具有基座端(422、422a)和操作机构端(424、424a)的机器人臂ra(400、400a),其中
3、-所述基座端(422、422a)安装在用于治疗受试者(50)的放射疗法治疗台(512)上或者是以固定关联可安装到所述放射疗法治疗台(512)上的,
4、-所述操作机构端(424、424a)设置有用于可拆卸地附接至具有近端和远端的定位工具(200)的ra配件(430、430a),所述远端被配置为捅入到受试者(50)的管中,
5、和
6、-包括至少一个处理器和存储器的处理单元(440),
7、其中所述处理单元(440)被配置为控制所述机器人臂ra(400、400a)的移动以将所述定位工具(200)定位在一个或多个治疗姿态,其中治疗姿态对应于在所述外部放射疗法疗程期间所述受试者(50)的管(602)与由电离辐射治疗头(518)发射的电离辐射束关联的通过定位工具(200)的空间对准。
8、还提供了一种用于在包括一个或多个外部放射疗法疗程的外部放射疗法程序中辅助受试者治疗的放射疗法系统(100),所述系统(100)包括:
9、-具有基座端(422、422a)和操作机构端(424、424a)的机器人臂ra(400、400a),其中
10、-所述基座端(422、422a)安装在用于治疗受试者(50)的放射疗法治疗台(512)上或者是以固定关联可安装到所述放射疗法治疗台(512)上的,
11、-所述操作机构端(424、424a)设置有用于可拆卸地附接至具有近端和远端的定位工具(200)的ra配件(430、430a),所述远端被配置为插入到所述受试者(50)的管中,
12、和
13、-包括至少一个处理器和存储器的处理单元(440),其中所述处理单元(440)被配置为在所述外部放射疗法疗程期间控制和固定所述机器人臂ra(400、400a)的移动,并且
14、-所述定位工具(200)包括:
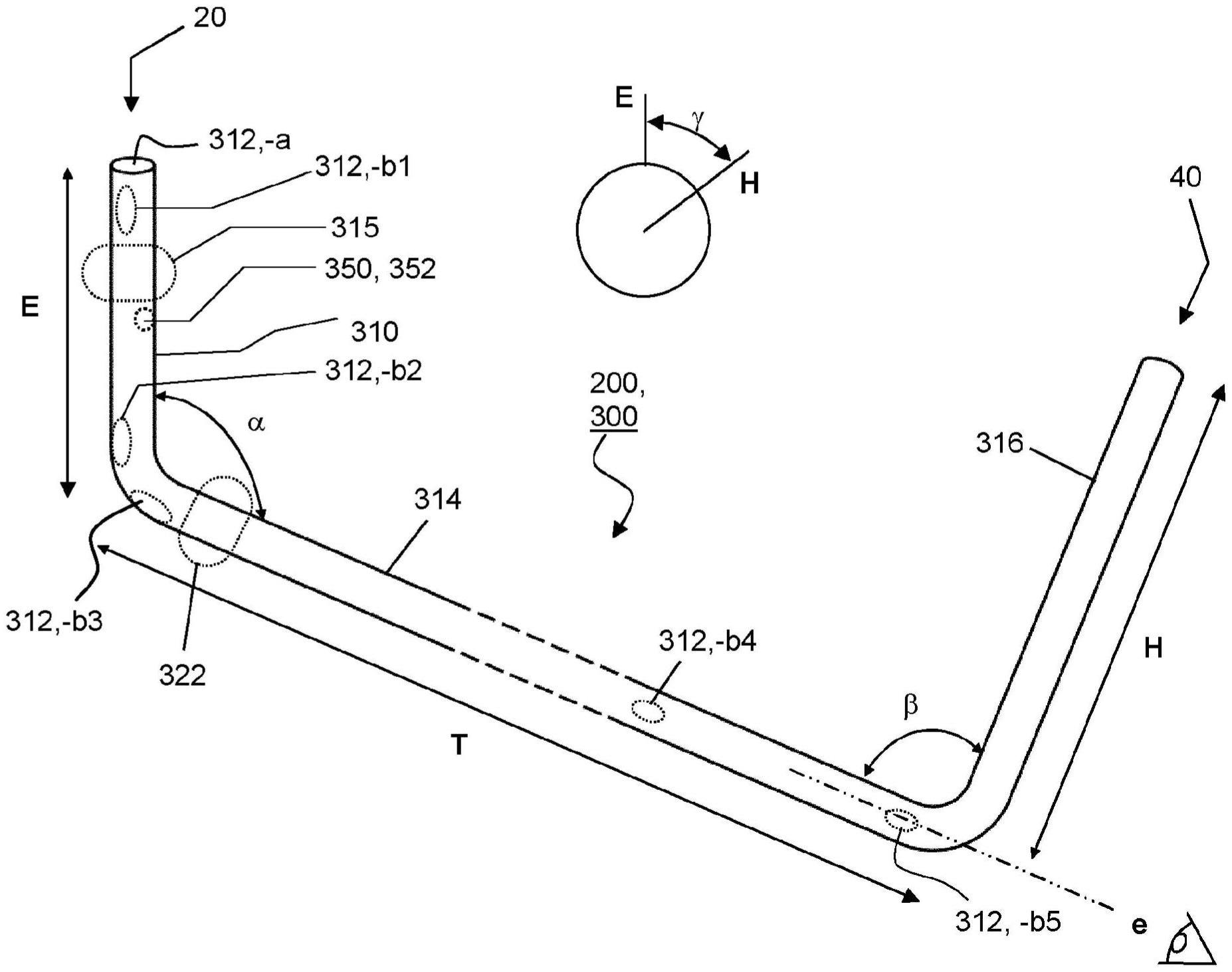
15、-具有近端(40)和远端(20)的操纵引导装置(300),其包括:
16、-在所述远端(20)处的刚性操作机构轴杆(310),其被配置为插入到所述受试者(50)的管(602)中或者附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,
17、-与所述操作机构轴杆(310)固定关联地设置在所述近端(40)处的刚性把手部(316),用于控制所述操作机构轴杆(310)的位置和/或方向,并且被配置为附接至所述ra配件(430、430a),
18、-将所述把手部(316)联结至所述操作机构轴杆(310)的刚性传动装置(314),
19、其中所述定位工具(200)被配置为响应于所述机器人臂的移动而移动和/或固定所述管(602)以用于所述外部放射疗法疗程。
20、所述处理单元(440)可以被配置为将所述定位工具(200)定位在一个或多个治疗姿态,其中治疗姿态对应于所述受试者(50)的管(602)的通过所述定位工具(200)的空间对准以用于所述外部放射疗法。
21、所述处理单元(440)可以被配置为根据所述定位工具(200)的一个或多个凭经验确定的模拟姿态来确定所述一个或多个治疗姿态。
22、所述受试者(50)的管(602)的通过所述定位工具(200)的空间对准:
23、-可以在所述外部放射疗法疗程期间将连接至所述管(602)的身体组织(608)带入到由电离辐射治疗头(518)发射的电离辐射束中,
24、或者
25、-可以在所述外部放射疗法疗程期间将连接至所述管(602)的身体组织(608)移动远离由电离辐射治疗头(518)发射的电离辐射束。
26、所述处理单元(440)可以被配置为确定定位工具(200)的治疗姿态,其包括:
27、-接收(a)一组模拟确定的参数,所述参数包括所述定位工具(200)相对于位置参考的一个或多个凭经验确定的模拟姿态,所述位置参考如束相交体积的模拟、等中心的模拟或者放置在模拟台(522)上并且与所述模拟台(522)处于已知位置的所述受试者的骨盆骨,
28、-接收(b)安装在所述模拟台(522)上的所述ra的ra基座端(422、422b)相对于位置参考的位置关系(spx,y,z),所述位置参考如束相交体积的模拟、等中心的模拟或者放置在模拟台(522)上并且与所述模拟台(522)处于已知位置的所述受试者的骨盆骨,
29、-接收(c)关于安装在所述放射疗法治疗台(512)上的所述ra的ra基座端(422、422a)相对于位置参考的位置关系(spx,y,z)的数据,所述位置参考如束相交体积、等中心和/或放置在放射疗法治疗台(512)上并且相对于所述放射疗法治疗台(512)处于已知位置的所述受试者的骨盆骨,以及-根据(a)、(b)和(c)确定所述定位工具(200)的一个或多个治疗姿态,其与所述定位工具(200)的一个或多个凭经验确定的模拟姿态对应。
30、所述处理单元(440)可以被配置为:
31、-在已经使所述定位工具(200)的姿态调整为与所述定位工具(200)的一个或多个凭经验确定的模拟姿态相对应之后接收关于所述定位工具(200)的原位姿态的实时信息,
32、-提供实时手动、自动或半自动的引导以细调所述定位工具(200)的姿态(以进一步对应于所述定位工具(200)的一个或多个凭经验确定的模拟姿态),
33、任选地其中关于所述定位工具(200)的原位姿态的实时信息是从与述放射疗法治疗台(512)已知关联地设置的医学成像单元获得的或者从与所述放射疗法治疗台(512)已知关联地设置的位置应答机读取器获得的。
34、所述放射疗法系统(100)还可以包括:
35、-放射疗法治疗台(512),其中放射疗法治疗台(512)设置有用于确定ra(400、400a)基座端(422、422a)相对于受试者(50)、特别是相对于与至少一条(优选两条)投射激光参考线对准的受试者的位置的测量标尺(514),
36、-模拟台(522),其中ra(400、400b)的基座端(422、422b)安装在或以固定关联可安装在模拟台(522)上以用于确定定位工具(200)的一个或多个凭经验确定的模拟姿态,其中模拟台(522)设置有用于确定ra(400、400b)基座端(422、422b)相对于受试者(50))、特别是相对于与至少一条(优选两条)投射激光参考线对准的受试者的位置的测量标尺(524)。
37、-任选地其中两个测量标尺(514、524)具有相同的刻度。
38、所述放射疗法系统(100)还可以包括膝部支撑件(450),其被配置为支撑以半仰卧位躺在所述放射疗法治疗台(512)或模拟台(522)上的所述受试者的膝部,其中所述膝部支撑件(450):
39、-包括具有基座端(453)和相反支撑侧(457)的主体(451),被配置为支撑在所述放射疗法治疗台(512)或模拟台(522)上的所述受试者的每个膝部的两个后面,
40、-被配置为可拆卸地附接至所述放射疗法治疗台(512)或模拟台(522)并且与所述放射疗法治疗台(512)或模拟台(522)成固定关联,
41、-主体(451)包括狭槽(454),所述ra的基座支撑件(432、432a、432b)能够在与所述放射疗法治疗台(512)或模拟台(522)和/或所述膝部支撑件(451)的所述主体(451)关联地限定的一个或多个位置中可锁定地滑动到所述狭槽(454)中,
42、和
43、所述膝部支撑件(450)的一个或两个侧面(456、458)可以是可标记的或者可以预先设置有参考标记(464、465)以指示其中投射激光参考线(516、526)越过所述一个或多个侧面(456、458)的位置。
44、所述放射疗法系统(100)还可以包括膝部支撑件(450),其被配置为支撑以半仰卧位躺在所述放射疗法治疗台(512)或模拟台(522)上的所述受试者的膝部,其中所述膝部支撑件(450):
45、-包括具有基座端(453)和相对支撑侧(457)的主体(451),被配置为支撑在所述放射疗法治疗台(512)或模拟台(522)上的所述受试者的每个膝部的两个后面,
46、-所述主体包含所述机器人臂ra(400、400a)的基座端(422、422a)。
47、所述膝部支撑件(450)可以包含相互附接在一起以形成所述膝部支撑件(450)的两个或更多个部分,其中
48、-所述膝部支撑件的一个部分(450,a)包含两个膝托(466、468),一个膝托支撑每个膝部后面,以及任选的电池组和任选的所述处理单元,
49、-所述膝部支撑件的另一个部分(450,b)包含所述机器人臂ra(400、400a)的基座支撑件(432、432a、432b)。
50、所述ra配件(430、430a)可以经由联动装置保险连接至所述ra(400、400a),其中所述联动装置保险被配置为:
51、-承受工作负荷而不会断开,并且
52、-在施加滥用负荷的情况下断开释放所述ra配件和所述ra(400、400a)之间的机械连接,
53、-响应于紧急按钮的激活而断开。
54、还提供了一种用于在外部放射疗法程序的外部放射疗法疗程期间将受试者的管(602)相对于由电离辐射治疗头(518)发射的电离辐射束进行定位的定位工具(200),所述外部放射疗法程序包括一个、两个或更多个所述外部放射疗法疗程,所述定位工具(200)包括:
55、-具有近端(40)和远端(20)的操纵引导装置(300),其包括:
56、-在所述远端(20)从的刚性操作机构轴杆(310),其被配置为插入到所述受试者(50)的管(602)中或者附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,和
57、-与所述操作机构轴杆(310)固定关联地设置在所述近端(40)处的刚性把手部(316),用于控制所述操作机构轴杆(310)的位置和/或方向;
58、-将所述把手部(316)联结至所述操作机构轴杆(310)的刚性传动装置(314),
59、其中
60、-所述定位工具(200)被配置为移动和/或固定所述管(602)以用于所述外部放射疗法疗程,并且
61、其中:
62、-可膨胀操作机构轴杆球囊(315)设置在所述操作机构轴杆(310)上,所述可膨胀操作机构轴杆球囊(315)是可重复膨胀的用于所述管(602)的扩张,并且是可重复缩小的以将所述操作机构轴杆(310)插入到所述管中或从所述管中抽出以用于每个外部放射疗法疗程,
63、和/或
64、-可膨胀传动装置球囊(322)设置在所述传动装置(314)的远端(20)上,所述可膨胀传动装置球囊(322)是可重复膨胀的用于所述管(602)的扩张,并且是可重复缩小的以将所述传动装置(314)插入到所述管中或从所述管中抽出以用于所述外部放射疗法疗程。
65、还提供了一种定位工具(200),其用于在外部放射疗法疗程期间与由电离辐射治疗头(518)发射的电离辐射束关联地定位受试者的管(602),该定位工具(200)包括:
66、-具有近端(40)和远端(20)的操纵引导装置(300),其包括:
67、-在远端(20)处的操作机构轴杆(310),其被配置为插入到受试者(50)的管(602)中或附接至插入装置(204),该插入装置(204)被配置为插入到受试者(50)的管(602)中,和
68、-设置在近端(40)处的把手部(316),其与操作机构轴杆(310)固定关联以用于控制操作机构轴杆(310)的位置和/或方向;
69、-将把手部(316)联结至操作机构轴杆(310)的传动装置(314)。
70、其中定位工具(200)被配置为与由电离辐射治疗头(518)发射的电离辐射束关联地移动和/或固定管(602)以用于外部放射疗法疗程。
71、所述操作机构轴杆(310)可以设置有可膨胀操作机构轴杆球囊(315),
72、和/或
73、所述传动装置(314)的远端(20)可以设置有可膨胀传动装置球囊(322)。
74、所述可膨胀操作机构轴杆球囊(315)可以是扩大受限的,其中球囊(315)扩大在有限的膨胀尺寸下可再现地停止,并且被配置为使所述操作机构轴杆在所述管(602)内居中,和/或
75、所述可膨胀传动装置球囊(322)可以是扩大受限的,其中所述球囊(322)扩大在有限的膨胀尺寸下可再现地停止并且被配置为使所述传动装置(314)在所述管(602)内居中。
76、所述可膨胀操作机构轴杆球囊(315)可以与膨胀内腔(324)流体连接,所述膨胀内腔(324)在所述操纵引导装置(300)的近端(40)方向上延伸,
77、任选地其中:
78、-所述操作机构轴杆球囊(315)膨胀内腔(324)设置为所述操作机构轴杆(310)和/或所述传动装置部(314)的至少一部分的主体内的通路,或者
79、-所述操作机构轴杆球囊(315)膨胀内腔(324)在管道(333)内,所述管道(333)设置在所述传动装置部(314)的至少一部分的主体内的通道(335)内;
80、和/或
81、-配件(329)如鲁尔配件设置在所述操作机构轴杆球囊(315)膨胀内腔(328)的近端处以用于连接至泵;
82、和/或
83、-所述可膨胀传动装置球囊(322)可以与膨胀内腔(328)流体连接,所述膨胀内腔(328)在所述操纵引导装置(300)的近端(40)方向上延伸,
84、任选地其中:
85、-所述可膨胀传动装置球囊(322)膨胀内腔(328)设置为在所述传动装置部(314)的至少一部分的主体内的通路,或者
86、-所述可膨胀传动装置球囊(322)膨胀内腔(328)在管道(327)内,所述管道(327)设置在所述传动装置部(314)的至少一部分的主体内的通道(331)内;
87、和/或
88、-配件(329)如鲁尔配件设置在所述膨胀内腔(328)的近端以用于连接至泵。
89、所述操作机构轴杆(310)可以相对于所述传动装置(314)采用角度α,并且α为:
90、90至260度,并且所述操作机构轴杆(310)被配置为附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,或者
91、170至190度,并且所述操作机构轴杆(310)被配置为直接插入到所述受试者的阴道管或肛管中,或者
92、90至260度,并且所述操作机构轴杆(310)被配置为直接插入到所述受试者的直肠管中,或者
93、和/或
94、-所述把手部(316)相对于所述传动装置(314)采用角度β,并且β为:
95、40至150度,并且所述操作机构轴杆(310)被配置为附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,或者
96、70至150度,并且所述操作机构轴杆(310)被配置为直接插入到所述受试者的阴道管或肛管中,或者
97、40至130度,并且所述操作机构轴杆(310)被配置为直接插入到所述受试者的直肠管中。
98、所述定位工具(200)还可以包括具有近端(40)和远端(20)的插入装置(204),所述插入装置(204)包括:
99、-细长构件(210),其被配置为通过所述管的入口插入到所述管中;并且
100、其中在所述远端(20)处所述操作机构轴杆(310)附接至或者可拆卸地附接至所述细长构件(210)。
101、定位工具(200)可以设置有一个或多个位置确定应答机(252a-c;256a-b),所述位置确定应答机(252a-c;256a_b)被配置为将关于所述定位工具(200)的原位姿态的实时信息发送给位置应答机读取器。
102、定位工具(200)可以至少部分地通过医学成像单元是可见的,任选地其中所述医学成像单元内置于放射疗法装置(510)中,所述放射疗法装置(510)发射所述电离放射疗法束以用于所述外部放射疗法疗程。
103、定位工具(200)可以至少部分地由作为mri相容性材料的材料制成,并且
104、是mri可见的,和/或
105、包含一种或多种mri可见的标记。
106、所述把手部(316)可以被配置为可拆卸地附接至机器人臂ra配件(430、430a),所述机器人臂ra配件(430、430a)设置在所述ra(400、400a、400b)的操作机构端(424、424a)端,
107、任选地其中所述把手部(316)设置有抓握定位装置(330),所述抓握定位装置(330)包括一个或多个凹口(334)和/或一个或多个突起和/或一个或多个拐角(332),其与包括抓握装置的所述ra配件(430)配合,使得所述抓握装置以位置可重复性和减少的游隙或反冲来抓握所述把手部(316),
108、任选地,其中所述抓握定位装置(330)包括:
109、-一个或多个凹口(334),其每一个具有一个方向,和
110、-沿着所述把手部(316)的轴线方向的拐角(332),
111、其中至少一个凹口方向不同于所述轴线方向,并且所述一个或多个凹口中的至少一个设置在所述拐角的跨度内。
112、所述操纵引导装置(300)可以设置有图像捕获系统(360),所述图像捕获系统(360)被配置为捕获来自所述操作机构轴杆(310)的远端尖端(361)的图像,从而允许在所捕获的图像的引导下将所述操作机构轴杆(310)插入到所述插入装置(204)细长构件内腔(214)中。
113、所述放射疗法系统(100)还可以包括所述定位工具(200)。
114、所述所述操纵引导装置(300)的把手部(316)设置有对接信标(340),所述对接信标(340)被配置为提供关于所述操纵引导装置(300)相对于所述ra配件(430)的位置和任选的取向的实时信息,其中所述控制器(440)被配置为提供手动、半自动或自动的引导以允许所述ra配件(430)与所述把手部(316)的对接,
115、任选地其中:
116、-所述对接信标是无源或有源的,或者无源和有源的组合,
117、-有源对接信标被配置为无线地发射关于所述把手部(316)的取向的信息,
118、-无源对接信标包括由所述ra的视觉引导系统可识别的预定义几何形状的主体,
119、-所述对接信标(340)从所述把手部(316)是可拆卸的或不可拆卸的。
120、所述ra(400、400a)可以设置有可切换的零重力模式,其中:
121、-处于零重力开启模式的所述ra(400、400a):
122、-允许手动引导所述ra配件(430、430a、430b)以用于与所述把手部(261)对接;和
123、-继续记录所述ra配件(430、430a、430b)的姿态,
124、-处于零重力关闭模式的所述ra(400、400a):
125、-在没有中间校准操作的情况下,在退出所述零重力开启模式时,根据所述ra配件(430、430a、430b)的姿态的最后一次记录,初步确定所述ra配件(430、430a、430b)的姿态。
126、所述放射疗法系统(100)可以被配置为使得枢轴点可分配给所述定位工具(200),所述枢轴点是所述定位工具(200)的一个点或区域,定位工具(200)的移动围绕所述点或区域枢转。
127、还提供了一种用于在包括两个或更多个外部放射疗法疗程的外部放射疗法程序中辅助受试者治疗的放射疗法系统(100),所述系统(100)包括:
128、-具有基座端(422、422a)和操作机构端(424、424a)的机器人臂ra(400、400a),其中:
129、-所述基座端(422、422a)安装在用于治疗受试者(50)的放射疗法治疗台(512)上或者是以固定关联可安装到所述放射疗法治疗台(512)上的,
130、-所述操作机构端(424、424a)设置有用于可拆卸地附接至具有近端和远端的定位工具(200)的ra配件(430、430a),所述远端被配置为插入到所述受试者(50)的管中或者附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,
131、-包括至少一个处理器和存储器的处理单元(440),其中所述处理单元(440)被配置为在所述外部放射疗法疗程期间控制所述机器人臂ra(400、400a)的移动以将所述定位工具(200)定位在一个或多个治疗姿态,
132、其中所述处理单元(440)被配置为接收可分配给所述定位工具(200)的枢轴点的输入,其中所述枢轴点是所述定位工具(200)的一个点或区域,定位工具(200)通过所述ra(400、400a)的移动围绕所述点或区域枢转。
133、所述处理单元(440)还可以被配置为将所述枢轴点保持在空间固定的位置,并且限制枢转旋转使得它们以空间固定的枢轴点为中心。
134、所述放射疗法系统(100)还可以包括操纵引导装置(300),所述操纵引导装置(300)包括:
135、-在所述远端(20)处的刚性操作机构轴杆(310),其被配置为插入到所述受试者(50)的管(602)中或附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,
136、-与所述操作机构轴杆(310)固定关联地设置在所述近端(40)处的刚性把手部(316),用于控制所述操作机构轴杆(310)的位置和/或方向,
137、-将所述把手部(316)联结至所述操作机构轴杆(310)的刚性传动装置(314),
138、其中所述枢轴点设置在在所述操纵引导装置(300)的所述操作机构轴杆(310)上或传动装置(314)上,或者在所述插入装置(204)上。
139、所述定位工具(200)可以设置有用于读取距离的刻度以用于测量所述枢轴点的位置。
140、所述枢轴点可以能够对应于所述受试者的管的入口定位。
141、所述枢轴点可以能够对应于以下定位:
142、-阴道的口,或者
143、-肛门的口。
144、还提供了一种用于在包括两个或更多个外部放射疗法疗程的外部放射疗法程序中辅助受试者治疗的放射疗法系统(100),所述系统(100)包括:
145、-具有基座端(422、422a)和操作机构端(424、424a)的机器人臂ra(400、400a),其中
146、-所述基座端(422、422a)安装在用于治疗受试者(50)的放射疗法治疗台(512)上或者是以固定关联可安装到所述放射疗法治疗台(512)上的,
147、-所述操作机构端(424、424a)设置有用于可拆卸地附接至具有近端和远端的定位工具(200)的ra配件(430、430a),所述远端被配置为插入到所述受试者(50)的管中或附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,
148、和
149、-包括至少一个处理器和存储器的处理单元(440),其中所述处理单元(440)被配置为在外部放射疗法疗程期间控制和固定所述机器人臂ra(400、400a)的移动以将所述定位工具(200)定位在一个或多个治疗姿态,
150、其中所述放射疗法系统(100)还包括:
151、-所述放射疗法治疗台(512),其中所述放射疗法治疗台(512)设置有测量标尺(514),其用于确定所述ra(400、400a)基座端(422、422a)相对于所述受试者(50)、特别是相对于与至少一条、优选两条投射激光参考线对准的受试者的位置,
152、-模拟台(522),其中所述ra(400、400b)的基座端(422、422b)安装在所述模拟台(522)上或者是与所述模拟台(522)以固定关联可安装的,所述模拟台(522)用于确定所述定位工具(200)的一个或多个凭经验确定的模拟姿态,其中所述模拟台(522)设置有测量标尺(524),其用于确定所述ra(400、400b)基座端(422、422b)相对于所述受试者(50)、特别是相对于与至少一条、优选两条投射激光参考线对准的受试者的位置,
153、-任选地其中两个测量标尺(514、524)都具有相同的刻度。
154、所述处理单元(440)可以被配置为根据所述定位工具(200)的一个或多个凭经验确定的模拟姿态来确定一个或多个治疗姿态。
155、所述受试者(50)的管(602)的通过所述定位工具(200)的空间对准可以:
156、-在外部放射疗法疗程期间将连接至所述管(602)的身体组织(608)带入到由电离辐射治疗头(518)发射的电离辐射束中,
157、或者
158、-在外部放射疗法疗程期间将连接至所述管(602)的身体组织(608)移动远离由电离辐射治疗头(518)发射的电离辐射束。
159、所述处理单元(440)可以被配置为确定定位工具(200)的治疗姿态,其包括:
160、-接收(a)一组模拟确定的参数,所述参数包括所述定位工具(200)相对于位置参考的一个或多个凭经验确定的模拟姿态,所述位置参考如束相交体积的模拟、等中心的模拟或者放置在模拟台(522)上并且与所述模拟台(522)处于已知位置的所述受试者的骨盆骨,
161、-接收(b)安装在所述模拟台(522)上的所述ra的ra基座端(422、422b)相对于位置参考的位置关系(spx,y,z),所述位置参考如束相交体积的模拟、等中心的模拟或者放置在模拟台(522)上并且与所述模拟台(522)处于已知位置的所述受试者的骨盆骨,
162、-接收(c)关于安装在所述放射疗法治疗台(512)上的所述ra的ra基座端(422、422a)相对于位置参考的位置关系(spx,y,z)的数据,所述位置参考如束相交体积、等中心和/或放置在放射疗法治疗台(512)上并且相对于所述放射疗法治疗台(512)处于已知位置的所述受试者的骨盆骨,以及-根据(a)、(b)和(c)确定所述定位工具(200)的一个或多个治疗姿态,其与所述定位工具(200)的一个或多个凭经验确定的模拟姿态对应。
163、所述处理单元(440)可以被配置为:
164、-在已经将所述定位工具(200)的姿态调整为与所述定位工具(200)的一个或多个凭经验确定的模拟姿态对应之后接收关于所述定位工具(200)的原位姿态的实时信息,
165、-提供实时手动、自动或半自动的引导以细调所述定位工具(200)的姿态,
166、任选地其中关于所述定位工具(200)的原位姿态的实时信息是从与所述放射疗法治疗台(512)已知关联地设置的医学成像单元获得的或者从相对于所述放射疗法治疗台(512)已知关联地设置的位置应答机读取器获得的。
167、放射疗法系统(100)还可以包括膝部支撑件(450),其被配置为支撑以半仰卧位躺在所述放射疗法治疗台(512)或模拟台(522)上的受试者的膝部,其中所述膝部支撑件(450):
168、-包括具有基座端(453)和相反支撑侧(457)的主体(451),其被配置为支撑在所述放射疗法治疗台(512)或模拟台(522)上的所述受试者的每个膝部的两个后面,
169、-被配置为可拆卸地附接至放射疗法治疗台(512)或模拟台(522)并与其固定关联,
170、-主体(451)包括狭槽(454),ra的基座支撑件(432、432a、432b)可以在与放射疗法治疗台(512)或模拟台(522)和/或膝部支撑件(451)的主体(451)固定关联地限定的一个或多个位置可锁定地滑动到该狭槽(454)中,
171、并且
172、膝部支撑件(450)的一个或多个侧面(456、458)可以是可标记的或预先设置有参考标记(464、465)以指示其中投射激光参考线(516、526)越过一个或多个侧面(456、458)的位置。
173、放射疗法系统(100)还可以包括膝部支撑件(450),其被配置为支撑以半仰卧位躺在放射疗法治疗台(512)或模拟台(522)上的受试者的膝部,其中该膝部支撑件(450):
174、-包括具有基座端(453)和相反支撑侧(457)的主体(451),其被配置为支撑在放射疗法治疗台(512)或模拟台(522)上的受试者的每个膝部的两个后面,
175、-主体包含机器人臂ra(400、400a)的基座端(422、422a)。
176、膝部支撑件(450)可以包含相互附接在一起以形成所述膝部支撑件(450)的两个或更多个部分,其中
177、-所述膝部支撑件的一个部分(450,a)包含两个膝托(466、468),一个膝托支撑每个膝部后面,以及任选的电池组和任选的所述处理单元,
178、-所述膝部支撑件的另一个部分(450,b)包含所述机器人臂ra(400、400a)的基座支撑件(432、432a、432b)。
179、ra配件(430、430a)可以经由联动装置保险连接至所述ra(400、400a),其中所述联动装置保险被配置为:
180、-承受工作负荷而不会断开,并且
181、-在施加滥用负荷的情况下断开释放所述ra配件和所述ra(400、400a)之间的机械连接,
182、-响应于紧急按钮的激活而断开。
- 还没有人留言评论。精彩留言会获得点赞!