一种大蒜收获机的制作方法
1.本发明涉及大蒜收获机械技术领域。
背景技术:
2.目前市场上的大蒜收获机所采用的形式大多都是上下往复运动,达到松土的效果。有一个弊端就是在工作过程中会出现一个情况:机器匀速前进,犁上下往复运动会出现一会阻力大,一会阻力小的情况,这样就会出现机器整体震动很剧烈,而且无法避免。在正常作业时,往往使用者会出现手臂震得发麻情况。使用效果很不好。另外有一种就是横向切割盘式的松土效果,主要原理就是通过松土盘入土后的旋转,将土搅散,达到松土的效果,有一点缺陷就是因为是旋转机械,所以会出现旋转轴入土后缠绕塑料薄膜的情况,缠绕到一定程度会导致机械瘫痪,无法工作。
技术实现要素:
3.本发明要解决的技术问题是提供一种大蒜收获机,它具有工作运行平稳可靠,便于操作,能耗小,收获的大蒜干净等特点。
4.为解决上述技术问题,本发明所采取的技术方案是:
5.一种大蒜收获机,包括设有行走装置的机架,在机架上设有一个以上起蒜装置,起蒜装置为松土起蒜装置,其包括偏心运动机构,犁刀摆动机构和松土起蒜犁刀;
6.偏心运动机构包括偏心运动结构和摇臂;偏心运动结构与摇臂的一端连接,偏心运动结构用于产生偏心旋转运动,从而带动摇臂产生往复摇摆运动;
7.犁刀摆动机构包括犁刀安装架和安装架转动连接结构;犁刀安装架包括犁刀安装架架体和摇杆,摇杆的一端与犁刀安装架架体固定连接,犁刀安装架架体通过安装架转动连接结构与机架转动连接;
8.摇杆的另一端与摇臂的另一端转动连接;摇臂往复运动时,带动摇杆往复摆动,摇杆带动犁刀安装架架体以安装架转动连接结构为轴心左右摆动;
9.松土起蒜犁刀与犁刀安装架架体通过犁刀安装结构固定连接;
10.松土起蒜犁刀包括蒜须根割离刀和一个以上松土翅;蒜须根割离刀包括蒜须根割离刀刀身和蒜须根割离刀刀身前端的蒜须根割离刀刀刃,松土翅设置在蒜须根割离刀刀身的后方;松土起蒜犁刀在摆动行进过程中,蒜须根割离刀刀刃将大蒜底部的蒜须根割离,蒜须根割离刀刀身对其上部封固大蒜的土壤与下部土壤割离形成土壤松动层;松土翅在左右摆动的过程中,将土壤松动层中的大蒜以一定频率的速度推送至松土翅摆动幅度范围的左右两侧,以将大蒜集中成列,便于大蒜起出作业,并对土壤松动层的土壤打碎,使附着在大蒜上的土壤松碎脱离,以便于大蒜由土壤中起出时减少泥土携带量,使起出的大蒜较为干净,省去大蒜清理环节。
11.本发明进一步改进在于:
12.松土起蒜犁刀为轴对称结构:松土起蒜犁刀的蒜须根割离刀为燕尾型,以形成三
角形的蒜须根割离刀刀刃,从而减少土壤对松土起蒜犁刀形成的行进阻力;松土翅为两个,分别对称设置在燕尾型蒜须根割离刀的两个尾部,以在松土起蒜犁刀相同的摆动角度下,使松土翅的左右摆动幅度最大。
13.两个松土翅由下至上向后倾斜,以减少土壤对松土起蒜犁刀形成的行进阻力。
14.犁刀安装结构为犁刀深度可调整固定连接结构。
15.犁刀深度可调整固定连接结构为:在蒜须根割离刀前端竖向设有犁刀安装条形板;在犁刀安装条形板上竖向间隔设有犁刀深度调整孔;在犁刀安装架架体的下方设有与犁刀安装条形板相适配的犁刀安装条形板装配槽,在犁刀安装条形板装配槽的两侧槽壁上对称设有螺栓连接孔;根据松土起蒜犁刀所需的插入深度,调整犁刀安装条形板插入犁刀安装条形板装配槽的相对位置,并对正犁刀深度调整孔与螺栓连接孔之后,通过螺栓将松土起蒜犁刀与犁刀安装架架体4固定连接,从而起到调整松土起蒜犁刀入土深度作用。
16.犁刀安装架架体为立柱,安装架转动连接结构包括套筒和两个套筒内置轴承,两个套筒内置轴承分别位于套筒的上端和下端,两个套筒内置轴承的外圈分别与套筒内壁固定连接,两个套筒内置轴承的内圈分别与立柱固定连接,套筒与机架固定连接。
17.松土起蒜装置还包括和犁刀深度支撑轮组件,松土起蒜犁刀位于行走装置的后方,犁刀深度支撑轮组件包括支撑轮高度可调整支架和支撑轮,支撑轮位于松土起蒜犁刀的后方,支撑轮通过支撑轮高度可调整支架与机架连接;当行走装置经过田埂时,在支撑轮的支撑作用下,避免大蒜收获机出现前后向起伏现象,从而保持其平稳性,进而保持松土起蒜犁刀插入土壤内的深度。
18.偏心运动机构为偏心轴,偏心轴的一端用于与驱动装置传动连接,偏心轴的另一端与摇臂的一端转动连接;驱动装置驱动偏心轴产生偏心运动,从而带动摇臂产生往复运动;摇臂的另一端通过球铰链连接结构或轴承与摇杆的另一端转动连接。
19.偏心运动机构包括传动轴,偏心套和轴承,传动轴通过偏心套与轴承的内圈固定连接,以使轴承偏心于传动轴设置;摇臂的一端与轴承的外圈固定连接;驱动装置驱动传动轴转动,从而带动轴承外圈产生偏心运动,轴承外圈带动摇臂产生往复运动;摇臂的另一端通过球铰链连接结构或轴承与摇杆的另一端转动连接。
20.在机架上设有驱动装置和扶手,驱动装置包括柴油发动机或汽油发动机,离合器和变速器,变速器通过传动装置将柴油发动机或汽油发动机的动力输出轴高转速输出转换成不同档位的低转速高扭矩动力输出,并通过离合器接通或断开柴油发动机或汽油发动机与变速器的动力传输;变速器驱动偏心运动结构产生偏心运动,从而带动松土起蒜犁刀左右摆动;变速器驱动行走装置转动,从而带动大蒜收获机前进。
21.行走装置为履带式行走装置。
22.采用上述技术方案所产生的有益效果在于:
23.本发明相对于上下往复运动式大蒜收获机,工作运行平稳,设备震动小,便于操作,行进阻力小,能耗小;相对于横向切割盘式大蒜收获机,避免出现塑料膜等异物缠绕旋转轴导致的机器瘫痪的现象,提高设备可靠性。本发明在工作过程中使大蒜集中成列,便于大蒜起出作业,并对土壤松动层的土壤打碎,使附着在大蒜上的土壤松碎脱离,以便于大蒜由土壤中起出时减少泥土携带量,使起出的大蒜较为干净,省去大蒜清理环节。
24.因此,它具有工作运行平稳可靠,便于操作,能耗小,收获的大蒜干净等特点。
附图说明
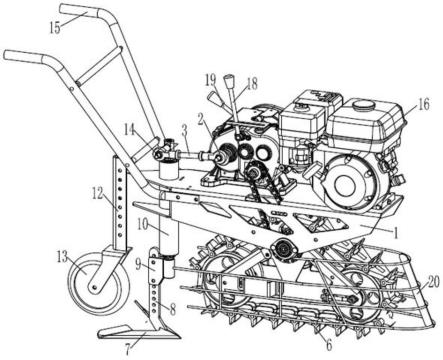
25.图1是大蒜收获机的轴测图;
26.图2是大蒜收获机的轴测图;
27.图3是大蒜收获机的主视图;
28.图4是大蒜收获机的主视图;
29.图5是大蒜收获机中松土起蒜装置的结构示意图;
30.图6是松土起蒜装置中偏心运动机构与犁刀摆动机构的结构示意图。
31.在附图中:1.大蒜收获机机架;2.偏心轴;3.摇臂;4.犁刀安装架架体;5.摇杆;6.行走装置;7.松土起蒜犁刀;7-1.蒜须根割离刀刀身;7-2.蒜须根割离刀刀刃;7-3.松土翅;8.犁刀安装条形板;8-1.犁刀深度调整孔;9.犁刀安装条形板装配槽;9-1.螺栓连接孔;10.套筒;11.套筒内置轴承;12.支撑轮高度可调整支架;13.支撑轮;14.球铰链连接结构;15.扶手;16.汽油发动机;17.变速器;18.前进挡变档手柄;19.离合器控制手柄;20.蒜秧防护罩。
具体实施方式
32.下面将结合附图和具体实施例对本发明进行进一步详细说明。
33.本发明中使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接、粘贴等常规手段,在此不再详述。
34.由图1~6所述的实施例可知,本实施例包括设有行走装置6的机架1,在机架1上设有一个以上起蒜装置,其特征在于:起蒜装置为松土起蒜装置,其包括偏心运动机构,犁刀摆动机构和松土起蒜犁刀7;
35.偏心运动机构包括偏心运动结构和摇臂3;偏心运动结构与摇臂3的一端连接,偏心运动结构用于产生偏心旋转运动,从而带动摇臂3产生往复摇摆运动;驱动装置驱动偏心运动结构产生偏心运动,从而带动摇臂3产生往复运动;
36.犁刀摆动机构包括犁刀安装架和用于与犁刀安装架和机架1转动连接的安装架转动连接结构;犁刀安装架包括犁刀安装架架体4和摇杆5,摇杆5的一端与犁刀安装架架体4固定连接,犁刀安装架架体4通过安装架转动连接结构与机架1转动连接;
37.摇杆5的另一端与摇臂3的另一端转动连接;摇臂3往复运动时,带动摇杆5往复摆动,摇杆5带动犁刀安装架架体4以安装架转动连接结构为轴心左右摆动;
38.松土起蒜犁刀7与犁刀安装架架体4通过犁刀安装结构固定连接;
39.松土起蒜犁刀7包括蒜须根割离刀和一个以上松土翅7-3;蒜须根割离刀包括蒜须根割离刀刀身7-1和蒜须根割离刀刀身7-1前端的蒜须根割离刀刀刃7-2,松土翅7-3设置在蒜须根割离刀刀身7-1的后方;松土起蒜犁刀7在摆动行进过程中,蒜须根割离刀刀刃7-2将大蒜底部的蒜须根割离,蒜须根割离刀刀身7-1对其上部封固大蒜的土壤与下部土壤割离形成土壤松动层;松土翅7-3在左右摆动的过程中,将土壤松动层中的大蒜以一定频率的速度推送至松土翅7-3摆动幅度范围的左右两侧,以将大蒜集中成列,便于大蒜起出作业,并对土壤松动层的土壤打碎,使附着在大蒜上的土壤松碎脱离,以便于大蒜由土壤中起出时减少泥土携带量,使起出的大蒜较为干净,省去大蒜清理环节。
40.蒜须根割离刀刀刃7-2所起的作用是将大蒜底部的蒜须根割离,蒜须根割离刀刀身7-1所起的作用是对其上部封固大蒜的土壤与下部土壤割离形成土壤松动层;因此,蒜须根割离刀刀身7-1上表面为平面或者近似于平面,以免在行进过程中,因较高的凸起对土壤产生较大阻力而对土壤产生翻动作用,保持土壤表面的平整性;松土翅7-3所起的作用是在摆动过程中将土壤中的大蒜推送至两侧集中成列,同时将附着在大蒜上的土壤松碎脱离,因此,其设计形状尽量减小在其摆动方向上与土壤的接触面,以减少土壤对松土起蒜犁刀7形成的摆动运动阻力,同时减小横向推动产生雍土,以尽量保持土壤表面的平整性。在后期耕种过程中,需要通过犁进行翻土作业,将种植层土壤上下翻动并耕出槽沟,从而为播种做好准备。由于采用大蒜收获机收获大蒜后尽量保持了田土的平整性。因此,对耕种作业不会造成影响。
41.松土起蒜犁刀7为轴对称结构:松土起蒜犁刀7的蒜须根割离刀为燕尾型,以形成三角形的蒜须根割离刀刀刃7-2,从而减少土壤对松土起蒜犁刀7形成的行进阻力;松土翅7-3为两个,分别对称设置在燕尾型蒜须根割离刀的两个尾部,以在松土起蒜犁刀7相同的摆动角度下,使松土翅7-3的左右摆动幅度最大。
42.两个松土翅7-3由下至上向后倾斜,以减少土壤对松土起蒜犁刀7形成的行进阻力。
43.犁刀安装结构为犁刀深度可调整固定连接结构。
44.犁刀深度可调整固定连接结构为:在蒜须根割离刀前端竖向设有犁刀安装条形板8;在犁刀安装条形板8上竖向间隔设有犁刀深度调整孔8-1;在犁刀安装架架体4的下方设有与犁刀安装条形板8相适配的犁刀安装条形板装配槽9,在犁刀安装条形板装配槽9的两侧槽壁上对称设有螺栓连接孔9-1;根据松土起蒜犁刀7所需的插入深度,调整犁刀安装条形板8插入犁刀安装条形板装配槽9的相对位置,并对正犁刀深度调整孔8-1与螺栓连接孔9-1之后,通过螺栓将松土起蒜犁刀7与犁刀安装架架体4固定连接,从而起到调整松土起蒜犁刀7入土深度作用。
45.犁刀安装架架体4为立柱,安装架转动连接结构包括套筒10和两个套筒内置轴承11,两个套筒内置轴承11分别位于套筒10的上端和下端,两个套筒内置轴承11的外圈分别与套筒10内壁固定连接,两个套筒内置轴承11的内圈分别与立柱固定连接,套筒10与机架1固定连接。
46.松土起蒜装置还包括和犁刀深度支撑轮组件,松土起蒜犁刀7位于行走装置6的后方,犁刀深度支撑轮组件包括支撑轮高度可调整支架12和支撑轮13,支撑轮13位于松土起蒜犁刀7的后方,支撑轮13通过支撑轮高度可调整支架12与机架1连接;当行走装置6经过田埂时,在支撑轮13的支撑作用下,避免大蒜收获机出现前后向起伏现象,从而保持其平稳性,进而保持松土起蒜犁刀7插入土壤内的深度。
47.偏心运动机构为偏心轴2,偏心轴2的一端用于与驱动装置传动连接,偏心轴2的另一端与摇臂3的一端转动连接;驱动装置通过传动连接结构驱动偏心轴2产生偏心运动,从而带动摇臂3产生往复运动;摇臂3的另一端通过球铰链连接结构14或轴承与摇杆5的另一端转动连接。
48.偏心运动机构包括传动轴,偏心套和轴承,传动轴通过偏心套与轴承的内圈固定连接,以使轴承偏心于传动轴设置;摇臂3的一端通过轴承座与轴承的外圈固定连接;驱动
装置通过传动连接结构驱动传动轴转动,从而带动轴承外圈产生偏心运动,轴承外圈带动摇臂3产生往复运动;摇臂3的另一端通过球铰链连接结构14或轴承与摇杆5的另一端转动连接(图中未示出)。
49.在机架1上设有驱动装置和扶手15,驱动装置包括柴油发动机或汽油发动机16,离合器和变速器17,变速器17通过传动装置将柴油发动机或汽油发动机16的动力输出轴高转速输出转换成不同档位的低转速高扭矩动力输出,并通过离合器接通或断开柴油发动机或汽油发动机16与变速器17的动力传输;变速器17驱动偏心运动结构产生偏心运动,从而带动松土起蒜犁刀7左右摆动;变速器17驱动行走装置6转动,从而带动大蒜收获机前进。
50.行走装置6为履带式行走装置,在履带式行走装置外周设有蒜秧防护罩20,在大蒜收获机作业过程中,流线型蒜秧防护罩20将蒜秧导向两侧,从而防止履带碾压。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1