一种宠物管理机器人
1.本发明涉及一种机器人,具体涉及一种宠物管理机器人,属于机器人技术领域。
背景技术:
2.近年来,随着宠物行业迅猛发展。宠物食品、宠物用品、宠物医疗等子行业欣欣向荣,宠物保险、宠物美容等新行业逐渐兴起,宠物经济大行其道。这些养宠人士,大多具有高强度的购买力和冲动性的消费力、以及愿意为宠物消费的主动性,这些促进了宠物经济的崛起和发展。
3.随着生活水平的提高也让人们对宠物的抚养要求提高,由于主人无法每时每刻的在家对宠物进行全天候的陪伴,市面上也出现了不少陪护型的宠物管理机器人来帮助主人对宠物进行照顾。但目前市面上的宠物管理机器人大多功能单一,多只限于定点投喂食物和水,无法很好地对宠物进行人性化的陪伴以及看护。因此,研究设计功一款更好更全面的宠物管理机器人就显得至关重要。
技术实现要素:
4.基于以上背景,本发明的目的在于提供一种具有自动喂食和引宠逗宠功能的宠物管理机器人,解决背景技术中所述的问题。
5.为了实现上述发明目的,本发明提供以下技术方案:
6.一种宠物管理机器人,包括:
7.移动平台,所述移动平台底部设有移动轮组件;
8.感知单元,设于移动平台上,所述感知单元包括超声波传感器、红外传感器、光栅传感器和水位传感器;
9.投喂单元,所述投喂单元包括沿移动平台高度方向自上而下依次设置的食物存储装置、食物搬运装置和食盆移位装置,所述光栅传感器和水位传感器设于所述食物存储装置内,所述食物搬运装置被配置为在控制装置控制下在食物存储装置下方的第一位置和食盆移位装置上方的第二位置之间切换,所述食盆移位装置被配置为在控制装置控制下在移动平台内部的第三位置和移动平台外部的第四位置之间切换;
10.互动单元,设于移动平台上,所述互动单元包括激光灯照射装置和抛投装置;以及,
11.控制装置,所述超声波传感器、红外传感器、光栅传感器、水位传感器、食物存储装置、食物搬运装置、食盆移位装置、激光灯照射装置和抛投装置均分别与控制装置电性连接,所述控制装置被配置为执行以下控制步骤:判断是否为投喂时间,若否则重复前述步骤,若是则通过光栅传感器检测食物存储装置的食物存储情况,若食物存储不满足要求则报警提示缺少食物,若食物存储满足要求则运行食物搬运装置至第一位置取得食物后移至第二位置,再运行食盆移位装置至第四位置,运行食物搬运装置将食物倒入食盆移位装置进行喂食,在持续完成设定喂食时间段后运行食盆移位装置至第三位置。
12.作为优选,所述食物存储装置包括第一支架和存储盒,所述存储盒通过第一支架与移动平台固定连接,所述存储盒设有储食腔和储水腔,所述储水腔内设有水泵,所述水位传感器设于储水腔内并与水泵电性连接,所述光栅传感器设于储食腔内,所述储食腔底设有用于食物颗粒穿过的落食孔,所述存储盒侧部设有用于封堵落食孔的挡板和落食电机,挡板连接落食电机的输出端,所述落食电机与控制装置电性连接,所述控制装置还被配置为执行以下控制步骤:判断是否为投喂时间,若否则重复前述步骤,若是则通过水位传感器检测储水腔内的水存储情况,若水存储不满足要求则报警提示缺少水,若水存储满足要求则运行水泵使水导入储水腔;运行食物搬运装置至第一位置时,运行落食电机使挡板至少部分的离开落食孔,使食物颗粒落入食物搬运装置中。
13.作为优选,所述食物搬运装置包括第一底座、上臂组件、前臂组件、腕部组件和食物铲,所述第一底座与移动平台固定连接,所述上臂组件的一端铰接于第一底座,上臂组件与第一底座的铰接轴沿移动平台高度方向设置,所述前臂组件的一端铰接于上臂组件的另一端,前臂组件与上臂组件的铰接轴沿与移动平台高度相垂直的方向设置,所述腕部组件铰接于前臂组件的另一端,腕部组件与前臂组件的铰接轴沿与移动平台高度相垂直的方向设置,所述食物铲固定连接于腕部组件端部。
14.作为优选,所述上臂组件包括上臂电机、第一固定板、第二固定板和第一连接板,所述上臂电机的输出端铰接于第一底座,上臂电机固定连接第一固定板,所述第一固定板通过第一连接板固定连接第二固定板,所述上臂电机与控制装置电性连接。
15.作为优选,所述前臂组件包括前臂电机、第三固定板、第四固定板和第五固定板,所述前臂电机的输出端铰接于所述第二固定板,前臂电机固定连接第三固定板,所述第三固定板通过第四固定板固定连接第五固定板,所述前臂电机与控制装置电性连接。
16.作为优选,所述腕部组件包括腕部电机、第六固定板和第二连接板,所述腕部电机的输出端铰接于所述第五固定板,腕部电机固定连接第六固定板,所述第六固定板通过第二连接板固定连接食物铲,所述腕部电机与控制装置电性连接。
17.作为优选,所述食盆移位装置包括双摇杆组件、食盆和水盆,所述食盆和水盆固定连接于双摇杆组件,所述双摇杆组件与移动平台活动连接,所述双摇杆组件包括双摇杆电机、第一连杆、第二连杆和第三连杆,所述双摇杆电机固定连接于移动平台,双摇杆电机的输出端铰接于第一连杆的一端,所述第一连杆的另一端铰接于第三连杆的一端,所述第三连杆的另一端铰接于第二连杆的一端,所述第二连杆的另一端铰接于移动平台,所述食盆和水盆固定连接于第三连杆表面,所述双摇杆电机与控制装置电性连接。
18.作为优选,所述激光灯照射装置包括第二底座、旋臂组件、照射臂组件和红外线发射器,所述旋臂组件的一端铰接于第二底座,旋臂组件与第二底座的铰接轴沿移动平台高度方向设置,所述照射臂组件铰接于旋臂组件的另一端,照射臂组件与旋臂组件的铰接轴沿与移动平台高度相垂直的方向设置,所述红外线发射器固定连接于照射臂组件顶部。
19.作为优选,所述旋臂组件包括旋臂电机、第七固定板、第三连接板和第八固定板,所述旋臂电机的输出端铰接于第二底座,旋臂电机固定连接于第七固定板,所述第七固定板通过第三连接板与第八固定板固定连接,所述第八固定板位于第七固定板上方,所述旋臂电机与控制装置电性连接。
20.作为优选,所述照射臂组件包括照射臂电机、第九固定板和第十固定板,所述照射
臂电机的输出端铰接于第八固定板,照射臂电机固定连接于第九固定板,所述第九固定板的端部固定连接于第十固定板,所述红外线发射器固定连接于第十固定板表面,所述照射臂电机与控制装置电性连接。
21.作为优选,所述抛投装置包括抛投电机、曲柄摇杆组件、第一带轮、第二带轮、牵引带、弹性带、抛投支架、抛投直轨和抛投弯轨,所述抛投电机设于抛投支架上,抛投电机的输出端通过曲柄摇杆组件连接第一带轮,所述抛投直轨的中部铰接于抛投支架,抛投直轨的一端通过弹性带连接抛投支架,抛投直轨的另一端连接抛投弯轨,抛投直轨邻近于抛投弯轨的一端底部连接牵引带,所述牵引带穿设于第二带轮并连接第一带轮。
22.作为优选,所述控制装置还被配置为执行以下控制步骤:根据超声波传感器和红外传感器接收的信号判定前方物体类别,若判定为狗,则运行抛投装置;若判定为猫,则运行激光灯照射装置;若判定为其它,则停止运行移动轮组件执行避障。
23.与现有技术相比,本发明具有以下优点:
24.本发明的一种宠物管理机器人,相对于现有定点投喂的产品,具有更高的智能化程度,能够很好的适应周围环境的变化,具有自动喂食和引宠逗宠的功能,实现对宠物进行人性化陪伴及看护。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
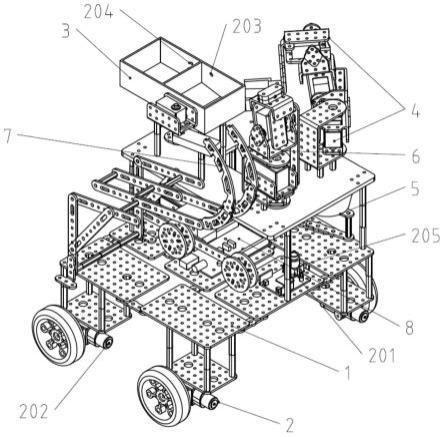
26.图1是本发明宠物管理机器人的立体结构示意图;
27.图2是本发明中移动轮组件的结构示意图;
28.图3是本发明中食物存储装置的结构示意图;
29.图4是本发明中食物搬运装置的结构示意图;
30.图5是本发明中食盆移位装置的结构示意图;
31.图6是本发明中激光灯照射装置的结构示意图;
32.图7是本发明中抛投装置的结构示意图;
33.图8是本发明中控制装置控制投喂的流程图;
34.图9是本发明中控制装置控制逗宠的流程图;
35.图10是本发明宠物管理机器人的样机图;
36.图11是本发明中控制装置判断缺水并进行报警的编程图;
37.图12是本发明中控制装置控制投喂的编程图;
38.图13是本发明中控制装置控制食盆移位的编程图;
39.图14是本发明中控制装置控制温湿度检测的编程图;
40.图15是本发明中控制装置控制激光灯照射装置的编程图;
41.图16是本发明中控制装置控制移动轮组件行走和避障的编程图。
42.图中:1、移动平台;2、感知单元;3、食物存储装置;4、食物搬运装置;5、食盆移位装置;6、激光灯照射装置;7、抛投装置;8、控制装置;101、移动轮电机;102、移动轮支架;103、
轮;201、超声波传感器;202、红外传感器;203、光栅传感器;204、水位传感器; 205、温湿度传感器;301、第一支架;302、存储盒;3021、储食腔;3022、储水腔;3023、落食孔;303、挡板;304、落食电机;401、第一底座;402、上臂组件;403、前臂组件;404、腕部组件;405、食物铲;4021、上臂电机;4022、第一固定板;4023、第二固定板;4024、第一连接板;4031、前臂电机;4032、第三固定板;4033、第四固定板;4034、第五固定板; 4041、腕部电机;4042、第六固定板;4043、第二连接板;501、食盆;502、水盆;503、双摇杆电机;504、第一连杆;505、第二连杆;506、第三连杆;601、第二底座;602、旋臂组件;603、照射臂组件;604、红外线发射器;6021、旋臂电机;6022、第七固定板;6023、第三连接板;6024、第八固定板;6031、照射臂电机;6032、第九固定板;6033、第十固定板;701、抛投电机;702、曲柄摇杆组件;703、第一带轮;704、第二带轮;705、牵引带; 706、弹性带;707、抛投支架;708、抛投直轨;709、抛投弯轨。
具体实施方式
43.下面通过具体实施例,并结合附图,对本发明的技术方案作进一步的具体说明。应当理解,本发明的实施并不局限于下面的实施例,对本发明所做的任何形式上的变通和/或改变都将落入本发明保护范围。
44.在本发明中,若非特指,所有的份、百分比均为重量单位,所采用的设备和原料等均可从市场购得或是本领域常用的。下述实施例中的方法,如无特别说明,均为本领域的常规方法。下述实施例中的部件或设备如无特别说明,均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
45.本发明的实施例公开了一种宠物管理机器人,包括移动平台1、感知单元2、投喂单元和、互动单元和控制装置8。移动平台1底部设有移动轮组件。感知单元2设于移动平台1上,感知单元2包括超声波传感器201、红外传感器202、光栅传感器203和水位传感器204。投喂单元包括沿移动平台1高度方向自上而下依次设置的食物存储装置3、食物搬运装置4和食盆移位装置5。光栅传感器203和水位传感器204设于食物存储装置3内,食物搬运装置4 被配置为在控制装置8控制下在食物存储装置3下方的第一位置和食盆移位装置5上方的第二位置之间切换,食盆移位装置5被配置为在控制装置8控制下在移动平台1内部的第三位置和移动平台1外部的第四位置之间切换。互动单元设于移动平台1上,互动单元包括激光灯照射装置6和抛投装置7。超声波传感器201、红外传感器202、光栅传感器203、水位传感器204、食物存储装置3、食物搬运装置4、食盆移位装置5、激光灯照射装置6和抛投装置7均分别与控制装置8电性连接。控制装置8被配置为执行以下控制步骤:判断是否为投喂时间,若否则重复前述步骤,若是则通过光栅传感器203检测食物存储装置3的食物存储情况,若食物存储不满足要求则报警提示缺少食物,若食物存储满足要求则运行食物搬运装置4至第一位置取得食物后移至第二位置,再运行食盆移位装置5至第四位置,运行食物搬运装置4将食物倒入食盆移位装置5进行喂食,在持续完成设定喂食时间段后运行食盆移位装置5至第三位置。通过对上述单元及装置的合理配置,相对于现有定点投喂的产品,该宠物管理机器人智能化程度更高,能够很好的适应周围环境的变化,具有自动喂食和引宠逗宠的功能,实现对宠物进行人性化陪伴及看护。以下结合附图对本发明的实施例做出详细说明。
46.一种宠物管理机器人,如图1所示,包括移动平台1、感知单元2、投喂单元、互动单元和控制装置8。
47.移动平台1底部设有移动轮组件。移动轮组件设有四个,分别位于移动平台1底部的四角,如图2所示,每个移动轮组件均包括移动轮电机101、移动轮支架102和轮103,移动轮电机101的输出端与轮103连接,移动轮电机101固定连接于移动轮支架102上。
48.感知单元2设于移动平台1上,感知单元2包括超声波传感器201、红外传感器202、光栅传感器203和水位传感器204。本实施例中感知单元2还包括用于获取环境温度和环境湿度的温湿度传感器205,可以帮助宠物主人较为直观的得知宠物所处环境是否舒适。超声波传感器201、红外传感器202、光栅传感器203、水位传感器204和温湿度传感器205均分别与控制装置8电性连接。当然,在另外的实施例中也可以不设置温湿度传感器205。
49.投喂单元包括沿移动平台1高度方向自上而下依次设置的食物存储装置3、食物搬运装置4和食盆移位装置5,食物存储装置3、食物搬运装置4和食盆移位装置5均分别与控制装置8电性连接。光栅传感器203和水位传感器204设于食物存储装置3内,食物搬运装置4 被配置为在控制装置8控制下在食物存储装置3下方的第一位置和食盆移位装置5上方的第二位置之间切换,食盆移位装置5被配置为在控制装置8控制下在移动平台1内部的第三位置和移动平台1外部的第四位置之间切换。
50.具体地,如图3所示,食物存储装置3包括第一支架301和存储盒302,存储盒302通过第一支架301与移动平台1固定连接,存储盒302设有储食腔3021和储水腔3022,储水腔3022内设有水泵,水泵出水端连接有水管,水管另一端接入水盆502,水位传感器204设于储水腔3022内并与水泵电性连接,光栅传感器203设于储食腔3021内,储食腔3021底设有用于食物颗粒穿过的落食孔3023,存储盒302侧部设有用于封堵落食孔3023的挡板303 和落食电机304,挡板303连接落食电机304的输出端,落食电机304与控制装置8电性连接。
51.具体地,如图4所示,食物搬运装置4包括第一底座401、上臂组件402、前臂组件403、腕部组件404和食物铲405,第一底座401与移动平台1固定连接,上臂组件402的一端铰接于第一底座401,上臂组件402与第一底座401的铰接轴沿移动平台1高度方向设置,前臂组件403的一端铰接于上臂组件402的另一端,前臂组件403与上臂组件402的铰接轴沿与移动平台1高度相垂直的方向设置,腕部组件404铰接于前臂组件403的另一端,腕部组件404与前臂组件403的铰接轴沿与移动平台1高度相垂直的方向设置,食物铲405固定连接于腕部组件404端部。
52.具体地,上臂组件402包括上臂电机4021、第一固定板4022、第二固定板4023和第一连接板4024,上臂电机4021的输出端铰接于第一底座401,上臂电机4021固定连接第一固定板4022,第一固定板4022通过第一连接板4024固定连接第二固定板4023,上臂电机4021 与控制装置8电性连接。
53.具体地,前臂组件403包括前臂电机4031、第三固定板4032、第四固定板4033和第五固定板4034,前臂电机4031的输出端铰接于所述第二固定板,前臂电机4031固定连接第三固定板4032,第三固定板4032通过第四固定板4033固定连接第五固定板4034,前臂电机 4031与控制装置8电性连接。
54.具体地,腕部组件404包括腕部电机4041、第六固定板4042和第二连接板4043,腕部电机4041的输出端铰接于所述第五固定板4034,腕部电机4041固定连接第六固定板
4042,第六固定板4042通过第二连接板4043固定连接食物铲405,腕部电机4041与控制装置8电性连接。
55.具体地,如图5所示,食盆移位装置5包括双摇杆组件、食盆501和水盆502,食盆501 和水盆502固定连接于双摇杆组件,双摇杆组件与移动平台1活动连接。双摇杆组件包括双摇杆电机503、第一连杆504、第二连杆505和第三连杆506,双摇杆电机503固定连接于移动平台1,双摇杆电机503的输出端铰接于第一连杆504的一端,第一连杆504的另一端铰接于第三连杆506的一端,第三连杆506的另一端铰接于第二连杆505的一端,第二连杆505 的另一端铰接于移动平台1,食盆501和水盆502固定连接于第三连杆506表面,双摇杆电机503与控制装置8电性连接。
56.互动单元设于移动平台1上,互动单元包括激光灯照射装置6和抛投装置7。激光灯照射装置6和抛投装置7均分别与控制装置8电性连接。
57.具体地,如图6所示,激光灯照射装置6包括第二底座601、旋臂组件602、照射臂组件 603和红外线发射器604,旋臂组件602的一端铰接于第二底座601,旋臂组件602与第二底座601的铰接轴沿移动平台1高度方向设置,照射臂组件603铰接于旋臂组件602的另一端,照射臂组件603与旋臂组件602的铰接轴沿与移动平台1高度相垂直的方向设置,红外线发射器604固定连接于照射臂组件603顶部。红外线发射器604发射出红外激光,通过旋臂组件602和照射臂组件603的运动使红外线发射器604向着不同方向移动,以此达到逗宠的效果。
58.具体地,旋臂组件602包括旋臂电机6021、第七固定板6022、第三连接板6023和第八固定板6024,旋臂电机6021的输出端铰接于第二底座601,旋臂电机6021固定连接于第七固定板6022,第七固定板6022通过第三连接板6023与第八固定板6024固定连接,第八固定板6024位于第七固定板6022上方,旋臂电机6021与控制装置8电性连接。
59.具体地,照射臂组件603包括照射臂电机6031、第九固定板6032和第十固定板6033,照射臂电机6031的输出端铰接于第八固定板6024,照射臂电机6031固定连接于第九固定板 6032,第九固定板6032的端部固定连接于第十固定板6033,红外线发射器604固定连接于第十固定板6033表面,照射臂电机6031与控制装置8电性连接。
60.具体地,如图7所示,抛投装置7包括抛投电机701、曲柄摇杆组件702、第一带轮703、第二带轮704、牵引带705、弹性带706、抛投支架707、抛投直轨708和抛投弯轨709,抛投电机701设于抛投支架707上,抛投电机701的输出端通过曲柄摇杆组件702连接第一带轮703,曲柄摇杆组件现有技术,用于将抛投电机701的旋转运动转换为第一带轮703的间歇摆动,抛投直轨708的中部铰接于抛投支架707,抛投直轨708的一端通过弹性带706连接抛投支架707,抛投直轨708的另一端连接抛投弯轨709,抛投直轨708邻近于抛投弯轨 709的一端底部连接牵引带705,牵引带705穿设于第二带轮704并连接第一带轮703。待抛投的玩具球放置在抛投直轨708上,当抛投电机701运行时,通过曲柄摇杆组件702旋转第一带轮703,牵引抛投弯轨709先沿着抛投直轨708与抛投支架707的铰接轴旋转至最低位置,此时弹性带706被拉伸,抛投直轨708与抛投弯轨709背离的一端的位置高于另一端,玩具球在重力作用下沿着抛投直轨708滑落至抛投弯轨709的弯曲部停留,随着曲柄摇杆组件702的继续运行,第一带轮703反转,不再通过牵引带705对抛投弯轨709提供牵引力,在弹性带706快速收缩回弹的作用下,抛投直轨708快速复位,抛投弯轨709快速旋转至最高位置,使玩具球沿着
抛投弯轨709的轨道运动并被抛飞。
61.控制装置8被配置为执行以下控制步骤:判断是否为投喂时间,若否则重复前述步骤,若是则通过光栅传感器203检测食物存储装置3的食物存储情况,若食物存储不满足要求则报警提示缺少食物,若食物存储满足要求则运行食物搬运装置4至第一位置,运行落食电机 304使挡板303至少部分的离开落食孔3023,使设定量的食物颗粒落入食物搬运装置4的食物铲405中,随后使挡板303归位,之后将食物搬运装置4移至第二位置,再运行食盆移位装置5至第四位置,运行食物搬运装置4将食物倒入食盆移位装置5进行喂食,在持续完成设定喂食时间段后运行食盆移位装置5至第三位置。控制装置8还被配置为执行以下控制步骤:判断是否为投喂时间,若否则重复前述步骤,若是则通过水位传感器204检测储水腔3022 内的水存储情况,若水存储不满足要求则报警提示缺少水,若水存储满足要求则运行水泵使水导入储水腔3022。控制装置8还被配置为执行以下控制步骤:根据超声波传感器201和红外传感器202接收的信号判定前方物体类别,若判定为狗,则运行抛投装置7;若判定为猫,则运行激光灯照射装置6;若判定为其它,则停止运行移动轮组件执行避障。控制装置8执行上述投喂步骤的具体流程图如图8和图9所示。
62.根据本实施例的技术方案制作的宠物管理机器人样机如图10所示,其中,控制装置8判断储水腔3022缺水并进行报警的程序如图11所示,控制装置8控制食物存储装置3放食和放水的程序如图12所示,控制装置8控制食盆移位装置5的程序如图13所示,控制装置8 控制温湿度检测的程序如图14所示,控制装置8控制激光灯照射装置6的程序如图15所示,控制装置8控制移动轮组件行走和避障的程序如图16所示。
63.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1