具有养殖舱海水分区智能清理系统的养殖工船及清理方法与流程
1.本发明属于养殖舱海水清理技术领域,具体涉及具有养殖舱海水分区智能清理系统的养殖工船及清理方法。
背景技术:
2.深远海水域具有渔业资源丰富、水源优质、水温适宜和远离陆源性污染与病害等显著优点,具备开展海上规模化养殖与物流加工补给的优良条件,是发展现代水产养殖业和海洋经济的新空间。
3.养殖工船是发展深远海水域养殖工程的核心装备之一,具有较高的经济价值、生态价值和社会价值。作为一种新型深远海养殖装备,相较于传统养殖平台具有可游弋躲避台风、赤潮等灾害的优势。目前,全球首艘十万吨级养殖工船正处于建设阶段。该船共设置15个大型养殖舱,养殖舱为“广口瓶”形状,内壁光滑,单个养殖舱尺寸约为长20m
×
宽20m
×
高19m,养殖舱水深14m,单个养殖舱养殖水体约为5600方。养殖工船作为一种高度集约化的养殖模式,具有养殖密度高、成鱼产品数量大、适应规模化生产高品质鱼类的特点。
4.在养殖舱养殖过程中,鱼类粪便、残饵等水中杂质日积月累,产生大量亚硝酸盐,使水质变差,进而影响养殖质量,目前,当养殖舱舱水水质变差时,只能依靠对舱水进行更换,由于养殖舱较大,更换舱水不仅费时耗能,且效率极低。
5.cn 208807406 u一种养殖工船养殖舱内清洗和吸污系统,属于渔业设备技术领域。养殖舱内壁固定有导轨,挂网架侧部设有导轮,导轮与导轨滚动连接,挂网架固定连接钢丝绳,位于养殖舱内壁上的驱动装置通过钢丝绳驱动挂网架在养殖舱内移动,所述挂网架侧部安装有多孔喷水清污管,挂网架上设有排污系统。上述专利通过带动喷头和排污系统在养殖舱内移动,冲洗养殖舱壁上青苔和蛤蜊等海生物;喷头两侧带充气护罩,可以防止冲洗时污物扩散;挂网架底部安装扇形吸入口,可以全覆盖式舱底吸污;污水泵能及时排污到工船上污水舱;但是其并不能够实时的对养殖舱海水进行实时监测及实时处理。
6.因此,实现对养殖舱海水的实时监测与自动化清理,对降低劳动量,提高养殖质量具有重要意义。
技术实现要素:
7.针对上述现有技术存在的问题与不足,提供了具有养殖舱海水分区智能清理系统的养殖工船及清理方法,其无需对养殖舱海水进行更换,可对养殖舱海水进行分区实时监测及实时处理,自动化程度高,清理快速便捷,降低了劳动量,减少水质差危害鱼类生长,提高了养殖质量。
8.为解决上述技术问题,本发明所采取的技术方案是,具有养殖舱海水分区智能清理系统的养殖工船,包括养殖工船本体,以及养殖舱,沿养殖舱的舱壁高度方向间隔设有多个由第一板体、第二板体,以及分别设于第一板体、第二板体上的第三板体及第四板体组成的运行腔,在第一板体上且沿第一板体高度方向等距设有多个与运行腔连通的,由第五板
体及分别设于第五板体顶部与底部的l型板体组成的固定腔,在固定腔内设有一与两l型板体接触的运行块,在运行块上设有一通过转动组件与运行块连接的伸缩机构,在伸缩机构上设有方形框,在方形框内设有一用于收集舱水中杂质的收集网,在伸缩机构下方设有一用于驱动伸缩机构转动的驱动气缸,在固定腔内设有一用于将运行块推送至运行腔的第一推送气缸,在第二板体上设有与第一推送气缸对应的用于将运行块推送至固定腔内的第二推送气缸,在运行腔内设有一用于承载运行块并驱动运行块沿运行腔腔壁运行的驱动装置,还包括多个沿养殖舱舱壁高度方向等距设置的用于分区实时监测舱水中杂质位置的视觉监测模块,用于接收视觉监测模块信息的中央控制模块,以及与中央控制模块信号连接的控制器,所述视觉监测模块监测舱水中杂质时,发送信号至中央控制模块,中央控制模块发送信号至控制器,控制器接收信号后,发送启动信号至伸缩机构驱动收集网收集舱水中杂质,当收集网收集完成后,控制器发送复位信号至伸缩机构,发送启动信号至第一推送气缸将运行块推送至运行腔,发送启动信号至驱动装置承载运行块并驱动运行块沿运行腔腔壁上行至运行腔顶部,并发送复位信号至第一推送气缸,发送启动信号至驱动气缸驱动伸缩机构转动至预定位置,当驱动气缸驱动伸缩机构转动至预定位置时,控制器发送停止信号至驱动气缸,当收集网清理或更换后,控制器发送复位信号至驱动气缸,并发送下行信号至驱动装置,当运行块下行至相应固定腔后,控制器发送停止信号至驱动装置,并发送启动信号至第二推送气缸将运行块推送至固定腔内,当第二推送气缸将运行块推送至固定腔内后,控制器发送复位信号至驱动装置及第二推送气缸。
9.上述的具有养殖舱海水分区智能清理系统的养殖工船,所述伸缩机构包括设于转动组件上的固定管,以及设于固定管内的伸缩气缸,在伸缩气缸上设有一与固定管内壁滑动连接的伸缩管,所述方形框设置于伸缩管一端,所述控制器发送信号至伸缩气缸。
10.上述的具有养殖舱海水分区智能清理系统的养殖工船,所述伸缩管包括多个设于固定管上的且直径逐级缩小的管体,在各管体一端分别设有与相邻管体内壁滑动连接的滑动板,在固定管及各管体上分别设有挡板,所述伸缩气缸与外端的管体的滑动板连接,所述方形框设于外端的管体上。
11.上述的具有养殖舱海水分区智能清理系统的养殖工船,所述转动组件包括对应设于运行块上的固定板,以及设于两固定板之间的转轴,所述固定管设于转轴上。
12.上述的具有养殖舱海水分区智能清理系统的养殖工船,所述驱动装置包括设于运行腔内的滑轨及滑块,以及一设于运行腔底部的驱动电机,一设于运行腔顶部的固定轴承,在固定轴承与驱动电机之间设有一驱动丝杆,在驱动丝杆上设有一与驱动丝杆适配的且与滑块连接的螺纹块,所述控制器发送信号至驱动电机。
13.上述的具有养殖舱海水分区智能清理系统的养殖工船,所述视觉监测模块可为水下摄像机,中央控制模块包括用于将视觉监测模块采集的图像与无杂质的水质图像进行实时对比的图像对比模块,以及当图像对比模块对比异常时,发送信号至控制器的信号发送模块。
14.上述的具有养殖舱海水分区智能清理系统的养殖工船,所述收集网为软质网,在方形框前部还设有一硬质网。
15.上述的具有养殖舱海水分区智能清理系统的养殖工船的清理方法,包括如下步骤:
16.(1)、分区实时监测舱水中杂质位置;
17.(2)、根据步骤(1)中监测舱水中杂质位置,相应区域内的收集网进行实时清理;
18.(3)、相应区域内的收集网进行实时清理完成后,收集网上行至养殖舱顶部,将收集网清理或更换;
19.(4)、将收集网清理或更换后,收集网复位;
20.(5)、重复步骤(1)-(4)。
21.本发明具有养殖舱海水分区智能清理系统的养殖工船及清理方法的有益效果是,通对养殖舱海水进行分区实时监测及实时处理,当海水中存在杂质时,无需对舱水进行更换,自动化程度高,清理快速便捷,降低了劳动量,提高了养殖质量。
22.通过视觉监测模块、中央控制模块、控制器、伸缩机构及驱动装置的实时配合,可对相应区域内的杂质进行及时清理,通过运行块运行,及时对收集网进行清理,保证收集网的收集效果。
附图说明
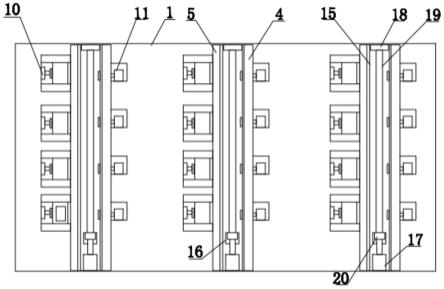
23.图1为实施例1中的养殖舱舱壁的主视图;
24.图2为实施例1中的运行腔的俯视图;
25.图3为实施例1中的伸缩机构与运行块连接的结构示意图;
26.图4为实施例1中的伸缩管的内部示意图;
27.图5为实施例1中的滑块与螺纹块连接的俯视图;
28.图6为实施例1中的固定腔的侧视图;
29.图7为实施例1中的方形框的侧视图;
30.图8为实施例1中的电路结构示意图;
31.图9为实施例2中的固定架与养殖舱连接的结构示意图;
32.图10为实施例2中的伸缩管的内部示意图。
具体实施方式
33.下面结合具体实施例对本发明做详细说明。
34.实施例1
35.如图1、2、3、4、5、6、7、8所示,具有养殖舱海水分区智能清理系统的养殖工船,包括养殖工船本体,以及养殖舱21,沿养殖舱21的舱壁1高度方向间隔设有多个由第一板体2、第二板体3,以及分别设于第一板体2、第二板体3上的第三板体4及第四板体5组成的运行腔,在第一板体2上且沿第一板体2高度方向等距设有多个与运行腔连通的,由第五板体6及分别设于第五板体6顶部与底部的l型板体7组成的固定腔,在固定腔内设有一与两l型板体7接触的运行块8,在运行块8上设有一通过转动组件与运行块8连接的伸缩机构,在伸缩机构上设有方形框9,在方形框9内设有一用于收集舱水中杂质的收集网30,在伸缩机构下方设有一用于驱动伸缩机构转动的驱动气缸23,由于海水在养殖舱中旋转流动,杂质在海水的带动下,可附着于收集网中,实现收集,在固定腔内设有一用于将运行块8推送至运行腔的第一推送气缸10,在第二板体3上设有与第一推送气缸10对应的用于将运行块8推送至固定腔内的第二推送气缸11,在运行腔内设有一用于承载运行块8并驱动运行块8沿运行腔腔壁
运行的驱动装置,还包括多个沿养殖舱舱壁高度方向等距设置的用于分区实时监测舱水中杂质位置的视觉监测模块,用于接收视觉监测模块信息的中央控制模块,以及与中央控制模块信号连接的控制器,所述视觉监测模块监测舱水中杂质时,发送信号至中央控制模块,中央控制模块发送信号至控制器,控制器接收信号后,发送启动信号至伸缩机构驱动收集网收集舱水中杂质,当收集网收集完成后,控制器发送复位信号至伸缩机构,发送启动信号至第一推送气缸将运行块推送至运行腔,发送启动信号至驱动装置承载运行块并驱动运行块沿运行腔腔壁上行至运行腔顶部,并发送复位信号至第一推送气缸,发送启动信号至驱动气缸驱动伸缩机构转动至预定位置,该预定位置是收集网与养殖舱21顶部相邻的位置,便于收集网清理或更换,可通过与控制器信号连接的接近开关检测,当驱动气缸驱动伸缩机构转动至预定位置时,控制器发送停止信号至驱动气缸,当收集网清理或更换后,控制器发送复位信号至驱动气缸,并发送下行信号至驱动装置,当运行块下行至相应固定腔后,控制器发送停止信号至驱动装置,并发送启动信号至第二推送气缸将运行块推送至固定腔内,此时运行块的下行力由其自身重力产生,落在驱动装置上,随着驱动装置的下行而下行,当第二推送气缸将运行块推送至固定腔内后,控制器发送复位信号至驱动装置及第二推送气缸。所述控制器为plc。
36.由于第一推送气缸设有多个,在驱动装置未复位前,控制器不发送信号至其他第一推送气缸。保障驱动装置的运行。
37.所述伸缩机构包括设于转动组件上的固定管12,以及设于固定管12内的伸缩气缸13,在伸缩气缸13上设有一与固定管12内壁滑动连接的伸缩管14,所述方形框9设置于伸缩管14一端,所述控制器发送信号至伸缩气缸13。
38.所述伸缩管包括多个设于固定管12上的且直径逐级缩小的管体24,在各管体24一端分别设有与相邻管体24内壁滑动连接的滑动板25,在固定管12及各管体24上分别设有挡板26,所述伸缩气缸13与外端的管体24的滑动板25连接,所述方形框9设于外端的管体24上。
39.所述转动组件包括对应设于运行块8上的固定板28,以及设于两固定板28之间的转轴29,所述固定管12设于转轴29上。
40.所述收集网30为软质网,在方形框9前部还设有一硬质网22,例如钢丝网,防止收集网收集杂质时,鱼类进入收集网。
41.所述驱动装置包括设于运行腔内的滑轨15及滑块16,以及一设于运行腔底部的驱动电机17,一设于运行腔顶部的固定轴承18,在固定轴承18与驱动电机17之间设有一驱动丝杆19,在驱动丝杆19上设有一与驱动丝杆19适配的且与滑块连接的螺纹块20,所述控制器发送信号至驱动电机17。
42.所述视觉监测模块可为水下摄像机,中央控制模块包括用于将视觉监测模块采集的图像与无杂质的水质图像进行实时对比的图像对比模块,以及当图像对比模块对比异常时,发送信号至控制器的信号发送模块。
43.上述的具有养殖舱海水分区智能清理系统的养殖工船的清理方法,包括如下步骤:
44.(1)、分区实时监测舱水中杂质位置;
45.(2)、根据步骤(1)中监测舱水中杂质位置,相应区域内的收集网进行实时清理;
46.(3)、相应区域内的收集网进行实时清理完成后,收集网上行至养殖舱顶部,将收集网清理或更换;
47.(4)、将收集网清理或更换后,收集网复位;
48.(5)、重复步骤(1)-(4)。
49.实施例2
50.本实施例与实施例1相同之处不再赘述,其不同之处在于,如图9-10所示,为提高本技术的自动化程度,减少工人劳动量,在固定管12内设有一电机31,所述伸缩气缸13设于电机31上,在舱壁1顶部设有多个固定架32,在各固定架32上分别设有一鼓风机33,以及一收集箱27,所述视觉监测模块监测舱水中杂质时,发送信号至中央控制模块,中央控制模块发送信号至控制器,控制器接收信号后,发送启动信号至伸缩机构驱动收集网收集舱水中杂质,当收集网收集完成后,控制器发送复位信号至伸缩机构,发送启动信号至第一推送气缸将运行块推送至运行腔,发送启动信号至驱动装置承载运行块并驱动运行块沿运行腔腔壁上行至运行腔顶部,并发送复位信号至第一推送气缸,发送启动信号至驱动气缸驱动伸缩机构转动至预定位置,该预定位置是收集网与养殖舱顶部相邻的位置,可通过与控制器信号连接的接近开关检测,当驱动气缸驱动伸缩机构转动至预定位置时,控制器发送停止信号至驱动气缸,并发送启动信号至伸缩气缸驱动伸缩管伸缩至鼓风机处时,控制器发送停止信号至伸缩气缸,该位置也可通过再设置一接近开关检测,控制器发送停止信号至伸缩气缸后,发送启动信号至电机将收集网旋转至与收集箱对应,发送启动信号至鼓风机将杂质吹送至收集箱,当鼓风机将杂质吹送至收集箱后,控制器发送停止信号至鼓风机,发送复位信号至电机及伸缩气缸,并发送复位信号至驱动气缸,并发送下行信号至驱动装置,当运行块下行至相应固定腔后,控制器发送停止信号至驱动装置,并发送启动信号至第二推送气缸将运行块推送至固定腔内,此时运行块的下行力由其自身重力产生,落在驱动装置上,随着驱动装置的下行而下行,当第二推送气缸将运行块推送至固定腔内后,控制器发送复位信号至驱动装置及第二推送气缸。
51.本实施例的清理方法为:
52.1)、分区实时监测舱水中杂质位置;
53.(2)、根据步骤(1)中监测舱水中杂质位置,相应区域内的收集网进行实时清理;
54.(3)、相应区域内的收集网进行实时清理完成后,收集网上行至养殖舱顶部,将收集网清理或更换;
55.(4)、将收集网收集的杂质自动吹送至收集箱;
56.(5)、收集网复位;
57.(6)、重复步骤(1)-(5)。
58.当然,上述说明并非对本发明的限制,本发明也并不局限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1