一种扫地机器人式割草机的避障机构
1.本发明涉及割草机技术领域,特别涉及一种扫地机器人式割草机的避障机构。
背景技术:
2.近年来,随着绿色生态种植模式的推广普及,不打除草剂,不用清耕法进行园艺管理的作业模式获得越来越多农业种植者的认同,割草机也就得到了广泛的应用,为了割草机在工作过程中不会撞到障碍物上,需要在割草机上安装避障机构。
3.然而,就目前传统割草机避障机构而言,多使用激光对障碍物进行识别,在草丛的高度较高时,很容易对发射器进行遮挡,使避障系统产生误判,导致割草机的避障能力受到影响,导致割草的质量和效率下降,同时现有的割草机避障机构大多只对具有一定高度的障碍物进行避障,在比较复杂的路况时,割草机很容易被土坎等障碍阻挡,甚至导致割草机的底盘被严重损伤。
技术实现要素:
4.本发明提供了一种扫地机器人式割草机的避障机构,具体包括:驱动机构;所述驱动机构的外侧安装有行进机构,且行进机构的两个固定架的滑槽内部插入有驱动机构的控制件a的t型凸起;所述驱动机构的主动轮插入在固定架的升降孔内部;所述固定架的伸缩杆插入在驱动机构的伸缩杆套筒内部;所述行进机构的履带内侧的上方与驱动机构的主动轮啮合;所述驱动机构的右侧安装有避障机构,且避障机构的导向件通过螺丝固定连接在控制件a的右侧;所述避障机构的下方安装有调节机构,且调节机构的升降件的限位杆插入在避障机构的控制件b的限位孔内部;所述升降件的弹簧压合在避障机构的压力传感器的下端;所述控制件a通过导线与控制件b、压力传感器的切割件电性连接。
5.可选地,所述控制件a的内部设有控制总成、两个伺服电机和电源,且控制件a的前后两侧分别设有两个t型凸起。
6.可选地,所述控制件a的前后两端固定连接有伸缩杆套筒,且伸缩杆套筒通过导线与控制件a的控制总成电性连接;所述控制件a的伺服电机通过主轴连接有主动轮,且主动轮的外侧固定连接有双排链轮。
7.可选地,所述固定架的内端面开设有两个t型滑槽,且固定架的t型滑槽之间开设有升降孔;所述固定架的左侧设有伸缩杆,且固定架的前端设有转轴。
8.可选地,所述固定架通过转轴连接有两个支撑臂,且支撑臂的下端开设有旋转孔;所述固定架的下方设有矩形凸起;所述固定架的旋转孔内部插入有从动轮,且从动轮的外侧固定连接有双排链轮。
9.可选地,两个所述支撑臂的矩形凸起之间固定连接有弹性件,且弹性件为弹簧;所述从动轮的外侧套装有履带,且履带的内侧与从动轮的链轮啮合。
10.可选地,所述导向件为菱形框架结构;所述导向件的下方通过螺丝固定连接有控制件b,且控制件b的前后两侧设有安装架;所述控制件b的安装架的上端面开设有固定孔,
且控制件b的下端面开设有限位孔。
11.可选地,所述控制件b的下方固定连接有切割件,且切割件的前端设有刀具;所述控制件b的固定孔内部插入有压力传感器。
12.可选地,所述升降件的上端设有限位柱,且升降件的升降件的上方固定连接有弹簧;所述升降件的右侧内部设有转轴;所述升降件的转轴外侧套装有接触轮。
13.有益效果根据本发明的各实施例的割草机避障机构,与传统割草机避障机构相比,其具有导向件,导向件菱形的结构使其在接触到障碍物的时候,与障碍物产生相对滑动,令割草机继续前行的同时,在导向件角度的限位下与障碍物错开,然后在控制件a控制总成的方向组件下进行方向校正,且由于草丛较为柔软,而障碍物较硬,所以草丛不会使导向件产生偏移,相对激光避障,较高的草丛不会对割草机的避障产生影响,保证割草的效率和质量。
14.此外,还具有调节机构,在割草机遇到地面上凸起的土坎的时候,接触轮会首先接触到土坎,并沿土坎滚过去,在这一过程中,接触轮会带动升降件上移,使压力传感器受到压力,根据压力的大小可以粗略对土坎的高度进行测量,此数据会传回控制件a,并在控制件a的控制下,使控制件a被伸缩杆顶起一定的高度,防止控制件a被土坎阻挡,或控制件a的下端面被土坎摩擦,产生损伤。
15.此外,如上所述,在进行割草的过程中,割草机前方的草会在接触轮的挤压下产生倒伏,并对草产生限制位置的压力,使接触轮左侧的切割件可以直接在草的根部进行切割,能有效避免部分草会被遗漏的情况。
附图说明
16.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
17.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
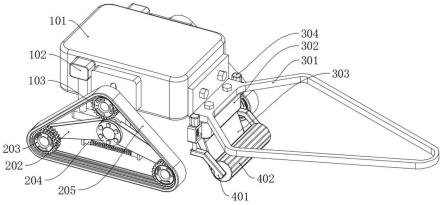
18.在附图中:图1示出了根据本发明的实施例的割草机避障机构的整体的立体结构示意图;图2示出了根据本发明的实施例的割草机避障机构的整体的爆炸图;图3示出了根据本发明的实施例的割草机避障机构的行进机构的立体截面示意图;图4示出了根据本发明的实施例的割草机避障机构的图3所示a处的局部放大示意图;图5示出了根据本发明的实施例的割草机避障机构的图4所示b处的局部放大示意图;图6示出了根据本发明的实施例的割草机避障机构的避障机构的装配图;图7示出了根据本发明的实施例的割草机避障机构的避障机构的仰视图;图8示出了根据本发明的实施例的割草机避障机构的图7所示c处的局部放大示意图。
19.附图标记列表1、驱动机构;101、控制件a;102、伸缩杆套筒;103、主动轮;
2、行进机构;201、固定架;202、支撑臂;203、从动轮;204、弹性件;205、履带;3、避障机构;301、导向件;302、控制件b;303、切割件;304、压力传感器;4、调节机构;401、升降件;402、接触轮。
具体实施方式
20.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
21.实施例:请参考图1至图8:本发明提出了一种扫地机器人式割草机的避障机构,包括:驱动机构1;驱动机构1的外侧安装有行进机构2,且行进机构2的两个固定架201的滑槽内部插入有驱动机构1的控制件a101的t型凸起;驱动机构1的主动轮103插入在固定架201的升降孔内部;固定架201的伸缩杆插入在驱动机构1的伸缩杆套筒102内部;行进机构2的履带205内侧的上方与驱动机构1的主动轮103啮合;驱动机构1的右侧安装有避障机构3,且避障机构3的导向件301通过螺丝固定连接在控制件a101的右侧;避障机构3的下方安装有调节机构4,且调节机构4的升降件401的限位杆插入在避障机构3的控制件b302的限位孔内部;升降件401的弹簧压合在避障机构3的压力传感器304的下端;控制件a101通过导线与控制件b302、压力传感器304的切割件303电性连接。
22.此外,根据本发明的实施例,如图2所示,控制件a101的内部设有控制总成、两个伺服电机和电源,且控制件a101的前后两侧分别设有两个t型凸起;控制件a101通过内部的控制总成对装置整体的电性元件进行控制,同时控制件a101用来安装本装置的其他机构;控制件a101整体可以在行进机构2的内部进行上下移动,通过避障机构3的控制,使控制件a101在遇到土坎的时候,能够根据土坎的高度升起一定的距离,防止控制件a101的底部被土坎阻挡,或被剧烈的摩擦受损;控制件a101的前后两端固定连接有伸缩杆套筒102,且伸缩杆套筒102通过导线与控制件a101的控制总成电性连接;伸缩杆套筒102在本装置遇到土坎等障碍的时候接收控制件a101传达的信号,使控制件a101升起;控制件a101的伺服电机通过主轴连接有主动轮103,且主动轮103的外侧固定连接有双排链轮;主动轮103为履带205提供动力,同时带动履带205上移。
23.此外,根据本发明的实施例,如图2所示,固定架201的内端面开设有两个t型滑槽,且固定架201的t型滑槽之间开设有升降孔;固定架201的左侧设有伸缩杆,且固定架201的前端设有转轴;固定架201用来支撑控制件a101,并对控制件a101进行限位,同时固定架201用来安装行进机构2的其他零件;固定架201通过转轴连接有两个支撑臂202,且支撑臂202的下端开设有旋转孔;固定架201的下方设有矩形凸起;支撑臂202用来安装从动轮203,同时在主动轮103随控制件a101上升或下降的时候,在收起或张开,保证履带205一直处于绷紧的状态,也保证控制件a101的上升和下降可以顺利实现;固定架201的旋转孔内部插入有从动轮203,且从动轮203的外侧固定连接有双排链轮;从动轮203配合主动轮103带动履带205运行;两个支撑臂202的矩形凸起之间固定连接有弹性件204,且弹性件204为弹簧;弹性件204为支撑臂202实现一个向内收缩的力,限制支撑臂202的转动方向;从动轮203的外侧套装有履带205,且履带205的内侧与从动轮203的链轮啮合;履带205便于在草坪上进行工
作,也具有更高的稳定性。
24.此外,根据本发明的实施例,如图6、图7所示,导向件301为菱形框架结构;导向件301右侧在接触到障碍时,通过导向件301右侧的菱形框架,可以使本装置产生一定方向的偏转,防止导向件301直接撞击到障碍物上,导致装置损坏;导向件301的下方通过螺丝固定连接有控制件b302,且控制件b302的前后两侧设有安装架;控制件b302的安装架的上端面开设有固定孔,且控制件b302的下端面开设有限位孔;控制件b302用来安装避障机构3的其他零件,同时控制件b302用来控制切割件303对草进行切割;控制件b302的下方固定连接有切割件303,且切割件303的前端设有刀具;切割件303用来自动割草;控制件b302的固定孔内部插入有压力传感器304;压力传感器304用来监测升降件401的上升幅度,并通过以上数据使控制件a101上升或下降。
25.此外,根据本发明的实施例,如图6、与7所示,升降件401的上端设有限位柱,且升降件401的升降件401的上方固定连接有弹簧;升降件401的右侧内部设有转轴;升降件401通过接触轮402产生上下方向的移动,对压力传感器304产生压力;升降件401的转轴外侧套装有接触轮402;接触轮402接触地面,用来反馈地面高度的变化。
26.本实施例的具体使用方式与作用:本发明中,其通过导向件301菱形的结构使其在接触到障碍物的时候,与障碍物产生相对滑动,令割草机继续前行的同时,在导向件301角度的限位下与障碍物错开,然后在控制件a101控制总成的方向组件下进行方向校正,且由于草丛较为柔软,而障碍物较硬,所以草丛不会使导向件301产生偏移;在割草机遇到地面上凸起的土坎的时候,接触轮402会首先接触到土坎,并沿土坎滚过去,在这一过程中,接触轮402会带动升降件401上移,使压力传感器304受到压力,根据压力的大小可以粗略对土坎的高度进行测量,此数据会传回控制件a101,并在控制件a101的控制下,使控制件a101被伸缩杆顶起一定的高度,防止控制件a101被土坎阻挡,或控制件a101的下端面被土坎摩擦,产生损伤;割草机前方的草会在接触轮402的挤压下产生倒伏,并对草产生限制位置的压力,使接触轮402左侧的切割件303可以直接在草的根部进行切割,能有效避免部分草会被遗漏的情况。
27.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
28.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1