自动化智能灌溉装置及其控制系统的制作方法
1.本发明涉及农业灌溉技术领域,具体为自动化智能灌溉装置及其控制系统。
背景技术:
2.农业灌溉,主要是指对农业耕作区进行的灌溉作业。农业灌溉方式一般可分为为传统的地面灌溉、普通喷灌以及微灌。
3.传统地面灌溉包括畦灌、沟灌、淹灌和漫灌,但这类灌溉方式往往耗水量大、水的利用力较低,是一类很不合理的农业灌溉方式。另外,普通喷灌技术是中国农业生产中较普遍的灌溉方式。但普通喷灌技术的水的利用效率也不高。现代农业微灌溉技术包括微喷灌、滴灌、渗灌等。这些灌溉技术一般节水性能好、水的利用率较传统灌溉模式高,当然,也存在着一些弊端。
4.现在灌溉通常为人工协助农用机械进行抽水灌溉,而抽水之前需要人工将水管沿着田埂或者沿着田中种植垄之间的通道排水管,这样较为费力,且灌溉水通常从管道的端部进行出水,大量的水从端部位置渗入地下,使得灌溉需要抽大量的水,较为耗费时间和能源。
技术实现要素:
5.本发明的目的在于提供自动化智能灌溉装置及其控制系统,以解决上述背景技术中提出的现在灌溉通常为人工协助农用机械进行抽水灌溉,而抽水之前需要人工将水管沿着田埂或者沿着田中种植垄之间的通道排水管,这样较为费力,且灌溉水通常从管道的端部进行出水,大量的水从端部位置渗入地下,使得灌溉需要抽大量的水,较为耗费时间和能源的问题。
6.为实现上述目的,本发明提供如下技术方案:自动化智能灌溉装置,包括:
7.抽吸泵站,所述抽吸泵站的进水口与水源连接,所述抽吸泵站的出水口通过管道连接分散主管;
8.分散支管,所述分散支管等距离连接在分散主管上,所述分散支管将抽吸泵站抽出的水均匀分散至需要灌溉的位置;
9.所述分散支管上沿长度方向等距离开设有分散排出口;
10.所述分散支管的管路上设置流量控制阀,所述流量控制阀设置在分散支管靠近分散主管的一端;
11.电控收卷小车,所述分散支管远离分散主管的一端绕接在电控收卷小车上;
12.处理芯片,所述处理芯片集成在抽吸泵站上,所述处理芯片与电控收卷小车、抽吸泵站电性连接。
13.优选的,所述电控收卷小车包括移动平台和转轴,所述移动平台上设置有驱动双轴电机,所述驱动双轴电机通过带轮机构与转轴之间驱动连接,所述转轴的两端均设置滚轮,所述驱动双轴电机与处理芯片电性连接,所述转轴的外壁上套接有轴承,所述轴承的外
壁上设置有支杆,所述支杆与移动平台之间固定连接。
14.优选的,所述转轴的外壁上设置有收卷辊,所述分散支管远离分散主管的一端绕接在收卷辊上。
15.优选的,所述移动平台远离转轴的一侧设置有液位传感器,所述液位传感器与处理芯片电性连接。
16.优选的,所述移动平台远离转轴的一侧设置有防护导向架,所述防护导向架呈三角形状,且液位传感器位于液位传感器的内侧。
17.自动化智能灌溉装置的控制系统,该自动化智能灌溉装置的控制系统包括:液位传感器、处理芯片、流量控制阀、抽吸泵站、驱动双轴电机和远程控制端;
18.所述液位传感器的输出端与处理芯片的输入端连接,所述处理芯片的输出端与流量控制阀、抽吸泵站、驱动双轴电机建立连接,所述远程控制端与处理芯片建立连接;
19.通过处理芯片预先设定需要灌溉水的深度,通过液位传感器对各个灌溉区域检测水深度,作为是否继续灌溉的依据;
20.开始灌溉时,远程控制端通过处理芯片对驱动双轴电机控制,使得驱动双轴电机驱动移动平台、转轴、滚轮移动,使得电控收卷小车移动对分散支管松脱,将分散支管铺开;
21.灌溉过程中,远程控制端通过处理芯片对流量控制阀控制,使得分散支管内的水流量得到控制;
22.灌溉后,远程控制端通过处理芯片对驱动双轴电机控制,使得电控收卷小车向回行驶,从而使得分散支管收卷到电控收卷小车上,并关闭抽吸泵站。
23.与现有技术相比,本发明的有益效果是:
24.1)通过将水均匀分散到田地中的各个位置,使得灌溉水能够均匀分布;
25.2)通过电控收卷小车的设置,能够将分散支管张开或者收纳,减轻人力。
附图说明
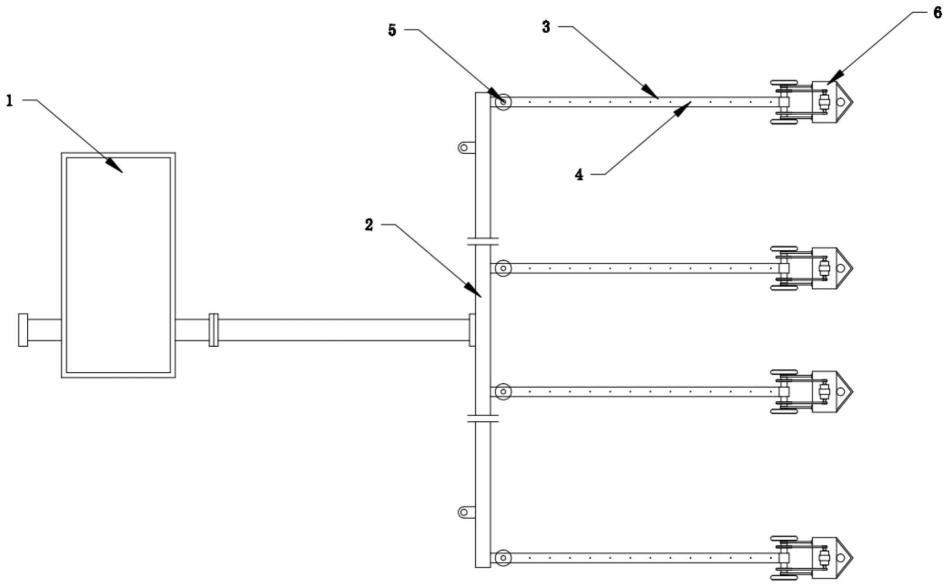
26.图1为本发明结构示意图;
27.图2为本发明电控收卷小车的结构示意图;
28.图3为本发明控制系统的逻辑框图。
29.图中:1抽吸泵站、2分散主管、3分散支管、4分散排出口、5流量控制阀、6电控收卷小车、61移动平台、62转轴、63驱动双轴电机、64带轮机构、65收卷辊、66轴承、67滚轮、68液位传感器、69防护导向架。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以
特定的方位构造和操作,因此不能理解为对本发明的限制。
32.实施例:
33.请参阅图1-3,本发明提供技术方案:自动化智能灌溉装置,包括:
34.抽吸泵站1,所述抽吸泵站1的进水口与水源连接,所述抽吸泵站1的出水口通过管道连接分散主管2;
35.分散支管3,所述分散支管3等距离连接在分散主管2上,所述分散支管3将抽吸泵站1抽出的水均匀分散至需要灌溉的位置;
36.所述分散支管3上沿长度方向等距离开设有分散排出口4;
37.所述分散支管3的管路上设置流量控制阀5,所述流量控制阀5设置在分散支管3靠近分散主管2的一端;
38.电控收卷小车6,所述分散支管3远离分散主管2的一端绕接在电控收卷小车6上;
39.处理芯片,所述处理芯片集成在抽吸泵站1上,所述处理芯片与电控收卷小车6、抽吸泵站1电性连接。
40.优选的,所述电控收卷小车6包括移动平台61和转轴62,所述移动平台61上设置有驱动双轴电机63,所述驱动双轴电机63通过带轮机构64与转轴62之间驱动连接,所述转轴62的两端均设置滚轮67,所述驱动双轴电机63与处理芯片电性连接,所述转轴62的外壁上套接有轴承66,所述轴承66的外壁上设置有支杆,所述支杆与移动平台61之间固定连接。
41.优选的,所述转轴62的外壁上设置有收卷辊65,所述分散支管3远离分散主管2的一端绕接在收卷辊65上。
42.优选的,所述移动平台61远离转轴62的一侧设置有液位传感器68,所述液位传感器68与处理芯片电性连接。
43.优选的,所述移动平台61远离转轴62的一侧设置有防护导向架69,所述防护导向架69呈三角形状,且液位传感器68位于液位传感器68的内侧。
44.自动化智能灌溉装置的控制系统,该自动化智能灌溉装置的控制系统包括:液位传感器68、处理芯片、流量控制阀5、抽吸泵站1、驱动双轴电机63和远程控制端;
45.所述液位传感器68的输出端与处理芯片的输入端连接,所述处理芯片的输出端与流量控制阀5、抽吸泵站1、驱动双轴电机63建立连接,所述远程控制端与处理芯片建立连接;
46.通过处理芯片预先设定需要灌溉水的深度,通过液位传感器68对各个灌溉区域检测水深度,作为是否继续灌溉的依据;
47.开始灌溉时,远程控制端通过处理芯片对驱动双轴电机63控制,使得驱动双轴电机63驱动移动平台61、转轴62、滚轮67移动,使得电控收卷小车6移动对分散支管3松脱,将分散支管3铺开;
48.灌溉过程中,远程控制端通过处理芯片对流量控制阀5控制,使得分散支管3内的水流量得到控制;
49.灌溉后,远程控制端通过处理芯片对驱动双轴电机63控制,使得电控收卷小车6向回行驶,从而使得分散支管3收卷到电控收卷小车6上,并关闭抽吸泵站1。
50.工作原理:抽吸泵站1将水抽出至分散主管2内,通过分散主管2将水分散至分散支管3内;
51.远程控制端对处理芯片设定处理方式,根据远程控制端的设定,处理芯片对液位传感器68采集液位值获取,对驱动双轴电机63驱动控制,使得电控收卷小车6的移动位置得到控制(不同田地长度不一),对流量控制阀5调控,使得分散支管3内的输出水量得到控制,当达到预先设定值时,处理芯片通过流量控制阀5对分散支管3内流量降低或者关闭。
52.驱动双轴电机63通过带轮机构64驱动转轴62转动,使得滚轮67转动并带动整体移动,转动的转轴62驱动收卷辊65转动,使得分散支管3卷绕到收卷辊65上或者从收卷辊65上松脱,防护导向架69对移动平台61起到保护作业,在移动过程中,防护导向架69能够起到开道作用,将前进方向上的阻挡物推开,液位传感器68能够对水的液位检测(现有技术,此处不做赘述)。
53.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
54.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1